
State Feedback Optimal Control with Singular Solution
for a Class of Nonlinear Dynamics
Paolo Di Giamberardino
1
and Daniela Iacoviello
1,2
1
Dept. Computer, Control and Management Engineering Antonio Ruberti, Sapienza University of Rome, Italy
2
Institute for Systems Analysis and Computer Science Antonio Ruberti, Rome, Italy
Keywords:
Optimal Control, Singular Control, Costate Independent Singular Surface, SIR Epidemic Model.
Abstract:
The paper studies the problem of determining the optimal control when singular arcs are present in the solution.
In the general classical approach the expressions obtained depend on the state and the costate variables at the
same time, so requiring a forward-backward integration for the computation of the control. In this paper,
sufficient conditions on the dynamics structure are provided and discussed in order to have both the control
and the switching function depending on the state only, so simplifying the computation avoiding the necessity
of the backward integration. The approach has been validated on a classical SIR epidemic model.
1 INTRODUCTION
Optimal control theory provides the natural frame-
work to solve control problems when contrasting go-
als are required with resource limitations. The de-
sign procedure can make use of the minimum princi-
ple, allowing the determination of the optimal cont-
rol that, depending on the cost index and on the mo-
deling, could be a bang-bang or a bang-singular-bang
solution, (Athans and Falb, 1996; Hartl et al., 1995;
Johnson and Gibson, 1963; Bryson and Ho, 1969).
In particular, if the model as well as the cost index
are linear in the control, the existence conditions of
such kind of solutions can be explicitly determined.
In the bang-bang solution the control assumes only
the extreme values, whereas the singular one is obtai-
ned if the Hamiltonian does not depend on the control
in an interval of positive measure. The extreme va-
lues assumed by the control depend on the sign of the
switching function, whereas the existence of singu-
lar control is related to the possibility that this swit-
ching function is identically zero on an interval of fi-
nite length.
The determination of singular control, while it is
easy from a theoretical point of view, is generally dif-
ficult to implement; the optimal control requires the
solution of a non linear differential equations system
in the state variables with initial conditions, and a non
linear differential equations system in the costate va-
riables with final conditions. Moreover, in general it
is not easy the determination of the best control se-
quence and the number of switching points, (Vossen,
2010; Fraser-Andrews, 1989).
In this paper, the determination of the optimal con-
trol of nonlinear systems is investigated referring to
the case in which the input acts linearly both in the
model and in the cost index, aiming at a constructive
computing of the singular solution. This approach
is then applied to a classical SIR epidemic problem,
where S stands for the class of susceptible subjects, I
for the class of infected patients and R for the class of
the removed ones (Di Giamberardino and Iacoviello,
2017; Bakare et al., 2014). Optimal control for epi-
demic spread containment has been widely used in
literature (Behncke, 2000; Di Giamberardino et al.,
2018). In particular, the optimal singular control for a
SIR epidemic model has been already studied in (Le-
dzewicz and Schattler, 2011; Ledzewicz et al., 2016),
where the structure of singular control has been dee-
ply investigated in presence of the double control,
vaccination and medical treatment, showing that the
latter can’t be singular, whereas a singular regimen is
expected for the optimal vaccination strategy. Diffe-
rently from (Ledzewicz et al., 2016), in this paper a
recovered subject could neither become susceptible,
nor infected again. Therefore, it is possible to study
the singular surface, that is the manifold over which
the state variables move under the action of the singu-
lar control, if it exists. Facing epidemic spread cont-
rol in the framework of optimal control theory is rat-
her common for its capability of suggesting suitable
scheduling of possible actions such as vaccination or
336
Giamberardino, P. and Iacoviello, D.
State Feedback Optimal Control with Singular Solution for a Class of Nonlinear Dynamics.
DOI: 10.5220/0006859903360343
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 336-343
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

quarantine or treatment, taking into account resource
limitations. The paper is organized as follows; the
optimal control problem is formulated in Section 2,
describing the conditions and the constraints usually
considered and giving the structure of the optimal so-
lution as well as the conditions for the existence of
both switches and singular arcs. Then, in Section 3
the class of dynamics considered is introduced and
constructive conditions for the singular solutions are
given for different formulations of the optimal pro-
blem. In Section 4 the case study describing the SIR
epidemic spread is introduced to verify and highlight
the effectiveness of the results.
2 THE OPTIMAL CONTROL
PROBLEM FORMULATION
The optimal control problem here addressed is refer-
red to the design of the control input u, for a given
nonlinear dynamics of the form
˙x = f (x) + g(x)u = f (x) +
m
∑
i=1
u
i
g
i
(x) (1)
where x ∈ R
n
, u ∈ R
m
and with x(t
0
) = x
0
, such that a
cost index
J =
Z
t
f
t
0
L(x, u,t)dt (2)
L : R
n
× R
m
× R → R, is minimised.
Usually, a bound on the input amplitude is consi-
dered, so that the control must satisfy
u
min
≤ u(t) ≤ u
MAX
∀t ∈ [t
0
,t
f
] (3)
with u
min
, u
MAX
∈ R
m
.
In the definition of the problem, additional con-
straints can be introduced.
i. The final time instant t
f
can be fixed, so that the
cost index results to be a function of the input only
J(u) =
Z
t
f
t
0
L(x, u,t)dt (4)
Be t
d
f
such a prefixed value, a constraint of the
form
χ(x(t
f
),t
f
) = 0 (5)
with χ(t
f
) = t
f
− t
d
f
has to be considered, with
χ ∈ C
1
almost everywhere, dim
{
χ
}
= 1.
ii. The final value for the state x(t
f
) = x
f
, or for σ
components only, can be fixed; in this case, x(t
f
)
must satisfy a condition of the form χ (x(t
f
)) =
x(t
f
) − x
f
, with dim
{
χ
}
= σ, 1 ≤ σ ≤ n, and the
cost index is a function of both u and t
f
J(u, t
f
) =
Z
t
f
t
0
L(x, u,t)dt (6)
Clearly, if t
f
is left free, it has to be found along
the solution computation.
The usual design procedure starts with the defini-
tion of the Hamiltonian function
H(x, λ, u, t) = L(x, u, t) + λ
T
( f (x) + g(x)u) (7)
in which the multiplier function λ(t) is introduced,
with λ(t) : R → R
n
, λ(t) ∈ C
1
almost everywhere.
The Hamiltonian (7) verifies the condition
H(x, λ, u, t) = K ∀t ∈ [t
0
,t
f
] (8)
with K ∈ R. Since (7) must satisfy
H(x, λ, u, t
f
) =
∂χ(x(t
f
),t
f
)
∂t
f
η (9)
for an unknown η ∈ R, K is a variable to be found
during the optimization procedure if the final time t
f
is fixed, with K = η, as in the previously mentioned
case i., while it is equal to zero when the final time is
left free.
From (7), and taking into account the dynamics
form (1), the differential equation describing the be-
haviour of λ can be obtained as
˙
λ = −
∂L
∂x
T
−
∂ f
∂x
T
+
m
∑
i=1
u
i
∂g
i
∂x
T
!
λ
under the boundary conditions
λ(t
f
) = −
∂χ(x(t
f
),t
f
)
∂x(t
f
)
T
ζ (10)
with ζ ∈ R
σ
to be found and χ in (5). Clearly, if con-
straint (5) is not present, (10) becomes
λ(t
f
) = 0 (11)
The structure of (7) suggests that if in L(x, u, t)
the control u is present with a linear contribution, the
whole Hamiltonian results to be affine with respect to
the control. This property can be very useful when the
minimum principle is applied.
Then, particularising the expression
L(x, u,t) =
˜
L(x,t) + c
T
u (12)
the structure of L as in (12), used in (7), gives the
compact expression
H(x, λ, u, t) =
˜
L(x,t) + c
T
u + λ
T
f (x) + λ
T
g(x)u =
=
˜
L(x,t) + λ
T
f (x) +
c
T
+ λ
T
g(x)
u =
= F(x, λ, t) + G(x, λ)u (13)
with
F(x, λ, t) =
˜
L(x,t) + λ
T
f (x) (14)
G(x, λ) = c
T
+ λ
T
g(x) (15)
State Feedback Optimal Control with Singular Solution for a Class of Nonlinear Dynamics
337

Clearly, the presence of the input u in the cost
function in a linear form is always possible, if u
min
in (3) is finite.
The minimum principle H(x, λ, u, t) ≤
H(x, λ, ω, t) ∀ω ∈ [u
min
, u
MAX
] can be used, gi-
ving, for (13), the condition G(x, λ)u ≤ G(x, λ)ω
∀ω ∈ [u
min
, u
MAX
]. As a consequence, the optimal
control
u =
u
MAX
if G(x, λ) < 0
u
min
if G(x, λ) > 0
(16)
can be obtained. The time instant t
s
such that
G(x(t
s
), λ(t
s
)) = 0 (17)
with
G(x
o
(t
−
s
), λ
o
(t
−
s
)) G(x
o
(t
+
s
), λ
o
(t
+
s
)) < 0
is the instant of switching in which the control chan-
ges from one extreme to the other, so getting a classi-
cal bang-bang solution. If condition (17) holds over a
finite time interval
G(x
o
(t), λ
o
(t)) = 0 t
0
≤ t
1
≤ t ≤ t
2
≤ t
f
(18)
with t
2
> t
1
, then the optimal control presents a sin-
gular solution and it assumes the form
u =
u
MAX
if G(x, λ) < 0
u
s
(x
o
, λ
o
) if G(x, λ) = 0
u
min
if G(x, λ) > 0
(19)
In this case, (18) means that G(x(t), λ(t)) is con-
stant over a finite time interval and, then, the identities
∂
k
G(x(t), λ(t))
∂t
k
= G
(k)
(x(t), λ(t)) = 0 ∀t ∈ [t
1
,t
2
]
(20)
must hold for any k ≥ 0. Computing (20), for
k = 0, 1, 2, . . . , there exists an index r such that
G
(k)
(x
o
(t), λ
o
(t)) is independent from u if k < r,
while, for k = r, the control u appears explicitly.
Then, the first r conditions (20), for k = 0, . . . , r − 1,
give r relations between state x and costate λ, and
from G
(r)
(x(t), λ(t)) = 0 the expression for the sin-
gular control u
s
in (19) can be obtained.
Making reference to the expression (15), one has
G
(0)
(x, λ) = c
T
+ λ
T
g(x) = 0 (21)
G
(1)
(x, λ) =
˙
λ
T
g(x) + λ
T
˙g(x) =
= −α
T
g(x) − λ
T
L
g
f (x) −
m
∑
i=1
u
i
λ
T
L
g
g
i
(x) +
+λ
T
L
f
g(x) +
m
∑
i=1
u
i
λ
T
L
g
i
g(x) =
= −α
T
g(x) + λ
T
ad
f
g(x) +
+
m
∑
i=1
u
i
λ
T
ad
g
i
g(x) = 0 (22)
where the compact expressions
L
f
g(x) = (L
f
g
1
(x). . . L
f
g
m
(x)) (23)
L
g
f (x) = (L
g
1
f (x) . . . L
g
m
f (x)) (24)
L
g
g
i
(x) = (L
g
1
g
i
(x) . . . L
g
m
g
i
(x)) (25)
L
g
i
g(x) = (L
g
i
g
1
(x) . . . L
g
i
g
m
(x)) (26)
ad
f
g(x) = L
f
g(x) − L
g
f (x) (27)
ad
g
i
g(x) = L
g
i
g(x) − L
g
g
i
(x) (28)
are used. Note that the structures of the Lie Bracket
introduced are
ad
f
g(x) =
ad
f
g
1
(x) ad
f
g
2
(x) ··· ad
f
g
m
(x)
ad
g
i
g(x) =
ad
g
i
g
1
(x) ad
g
i
g
2
(x) ··· ad
g
i
g
m
(x)
recalling that ad
g
i
g
i
(x) = 0 ∀i ∈ [1, m].
If dynamics (1) is such that the vector fields g
i
commute, then
∑
m
i=1
u
i
λ
T
ad
g
i
g(x) = 0, as in (Ledze-
wicz and Schattler, 2011; Ledzewicz et al., 2016); the
identity (22) reduces to
G
(1)
(x, λ) = −α
T
g + λ
T
ad
f
g(x) = 0 (29)
and G
(2)
(x, λ) has to be computed, iterating the pro-
cedure. As well known (Bryson and Ho, 1969), this
iteration ends at a finite index r such that G
(r−1)
(x, λ)
is not dependent from u while G
(r)
(x, λ) is, so giving
the control expression as a function of the x and λ.
3 BLOCK SUB TRIANGULAR
SINGLE INPUT SYSTEMS
The class of dynamics (1) considered is here particu-
larised setting x non negative and m = 1. Such choi-
ces allow to simplify the notations: m = 1 gives a
simpler expression for the input contribution from (1)
on, while, thanks to the non negativeness of the state,
˜
L(x,t) = α
T
x can be used, so obtaining a fully linear
term in the cost function. Then,
˙
λ in (10) becomes
˙
λ = −α −
∂ f
∂x
T
λ − u
∂g
∂x
T
λ (30)
while the existence of singular solutions gives for the
conditions (21) and (22) on the G
(k)
(x
o
(t), λ
o
(t)) the
expressions
G
(0)
(x, λ) = c + λ
T
g(x) = 0 (31)
G
(1)
(x, λ) = −α
T
g(x) + λ
T
ad
f
g(x) = 0 (32)
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
338

with (32) always independent from u. Then, also the
computation of G
(2)
(x, λ, u) = 0 must be performed:
G
(2)
(x, λ, u) = −α
T
(L
f
g(x) + uL
g
g(x)) +
−
α
T
+ λ
T
∂ f
∂x
+ uλ
T
∂g
∂x
ad
f
g(x) +
+λ
T
(L
f
ad
f
g(x) + uL
g
ad
f
g(x)) =
=
λ
T
ad
2
f
g(x) − α
T
(L
f
g(x) + ad
f
g(x))
+
−
α
T
L
g
g(x) − λ
T
ad
g
ad
f
g(x)
u (33)
If α
T
L
g
g(x) − λ
T
ad
g
ad
f
g(x) 6= 0, the singular
control u
s
can be obtained as
u
s
(x, λ) =
λ
T
ad
2
f
g(x) − α
T
(L
f
g(x) + ad
f
g(x))
α
T
L
g
g(x) − λ
T
ad
g
ad
f
g(x)
(34)
otherwise G
(2)
(x, λ, u) = G
(2)
(x, λ), the condition
λ
T
ad
2
f
g(x) − α
T
(L
f
g(x) + ad
f
g(x)) = 0 (35)
involving x and λ only, is obtained, and a further de-
rivative G
(3)
(x, λ, u) must be computed. Set r as the
first index such that G
(r)
(x, λ, u) is dependent from the
input. It is easily verified that
Proposition 1. The expression of the i–th derivative
G
(i)
(x, λ), for i = 0, 1, . . . , r − 1, is of the form
G
(i)
(x, λ) = λ
T
ad
i
f
g(x) + h
i
(x)
for suitable functions h
i
(x) (h
0
(x) = c, h
1
(x) =
−α
T
g(x)).
Proof: It comes iteratively at i–th step from the struc-
ture of G
(i−1)
(x, λ) and the computations evidenced in
(33).
The class of nonlinear dynamics considered is of
the form
˙x
1
˙x
2
=
f
1
(x
1
)
f
2
(x
1
)
+
g
1
(x
1
)
g
2
(x
1
)
u (36)
where x
1
∈ R
r
, x
2
∈ R
n−r
, and the functions f
i
and g
i
defined consequently. The controllability condition
dim
span
n
g
1
, ad
f
1
g
1
, . . . , ad
r−1
f
1
g
o
(x
1
)
= r (37)
for the first subsystem is assumed verified, with x
1
in a suitable domain containing x
1
(t
0
). The example
used in Section 4 to illustrate the proposed approaches
fulfils this hypothesis with r = 2.
Consequently, setting
λ =
λ
1
λ
2
λ
1
∈ R
r
, λ
2
∈ R
n−r
(38)
one has
∂L
∂x
=
∂L
∂x
1
∂L
∂x
2
∂ f
∂x
=
∂ f
1
(x
1
)
∂x
1
0
∂ f
2
(x
1
)
∂x
1
0
!
∂g
∂x
=
∂g
1
(x
1
)
∂x
1
0
∂g
2
(x
1
)
∂x
1
0
!
so that (10) becomes
˙
λ
1
˙
λ
2
= −
∂L
∂x
1
∂L
∂x
2
!
+
∂ f
T
1
(x
1
)
∂x
1
∂ f
T
2
(x
1
)
∂x
1
0 0
!
λ +
+u
∂g
1
(x
1
)
∂x
1
∂g
2
(x
1
)
∂x
1
0 0
!
λ (39)
The above equation can be explicitly decomposed
into
˙
λ
1
= −
∂L
∂x
1
−
∂ f
T
1
(x
1
)
∂x
1
+ u
∂g
1
(x
1
)
∂x
1
λ
1
+
−
∂ f
T
2
(x
1
)
∂x
1
+ u
∂g
2
(x
1
)
∂x
1
λ
2
(40)
˙
λ
2
= −
∂L
∂x
2
(41)
From this structure, and on the basis of the expres-
sion of constraint (5), if present, one has the following
proposition:
Proposition 2. Given the optimal control problem,
with fixed time t
f
and free final conditions on the state,
for a non linear dynamics of the form (36) and the
cost function (4) with L(x, u, t) = α
T
1
x
1
+ cu, α
1
∈ R
r
,
there exists an algorithm for the computation of the
optimal singular solution which gives the expression
of the control law as a pure state feedback, bringing to
a bang–singular–bang optimal control, for which the
singular surface can be explicitly written as a state
function only. Moreover, after the last switch, the op-
timal control u is equal to u
min
.
Proof: The independence of the constraint (5) from
the state x(t
f
) makes (11) hold; moreover, the choice
for L(x, u, t) gives, for equation (41), the simple ex-
pression
˙
λ
2
= 0 which, for (11) and for the continuity
hypothesis on λ(t), gives λ
2
(t) = 0 ∀t ∈ [t
0
,t
f
]. This
means that, for t = t
f
, G(x, λ) = c ≥ 0, and then the
last condition in (19) is satisfied. Moreover, for the
continuity conditions on x and λ, the inequality must
hold over a finite time interval, which necessarily cor-
responds to the last bang interval, so proving the last
claim of the Proposition.
Equations G
(i)
(x, λ), i = 0, 1, . . . , r − 1, can be re-
State Feedback Optimal Control with Singular Solution for a Class of Nonlinear Dynamics
339

written as
G
(0)
(x, λ) = λ
T
1
g
1
(x
1
) + c = 0 (42)
G
(1)
(x, λ) = λ
T
1
ad
f
1
g
1
(x
1
) − α
T
1
g
1
(x
1
) = 0
(43)
. . . = . . .
G
(r−1)
(x, λ) = λ
T
1
ad
r−1
f
1
g
1
(x
1
) + h
r−1
(x
1
) = 0
(44)
or in the compact form
λ
T
1
g
1
(x
1
), ad
f
1
g
1
(x
1
), . . . ad
i−1
f
1
g
1
(x
1
)
=
=
−c, α
T
1
g
1
(x
1
), . . . h
i−1
(x
1
)
from which
λ
T
1
= (−c, . . . h
i−1
(x
1
))
g
1
(x
1
), . . . ad
i−1
f
1
g
1
(x
1
)
−1
(45)
can be computed under the controllability condition
(37). Then, the costate λ is fully known, at least as a
function of the state. A first consequence of this fact is
the possibility to express the singular control u
s
(x, λ)
as a state function only, in particular a function of x
1
,
u
s
= u
s
(x
1
).
Now, from (8), applied in (13) and then in (14)
when (18) holds, one gets the expression
F(x, λ, t) = α
T
1
x
1
+ λ
T
1
f
1
(x
1
) = K (46)
which, using (45), brings to the state function
K = α
T
1
x
1
+
+(−c . . . h
i−1
(x
1
))
g
1
(x
1
) . . . ad
i−1
f
1
g
1
(x
1
)
−1
f
1
(x
1
)
(47)
which fully describes the singular surface in the x
1
subspace. As far as the subspace x
2
is concerned,
once the evolution of x
1
is determined, also x
2
is fully
known, since (36), the singular control u
s
(x
1
) and the
evolution of x
1
satisfying (47) allow to compute x
2
(t)
∀t ∈ [t
1
,t
2
]. The value of the unknown parameter K
can be computed noting that, from (13) evaluated af
t = t
f
, one has
H(x, λ, u, t
f
) = α
T
1
x
1
(t
f
) = K (48)
being u(t
f
) = 0 as well as λ(t
f
) = 0. Expression (48),
once x(t
f
) is computed, gives K.
Proposition 2 allows to fully compute the singular
part of the optimal solution. The full solution (19) is
obtained including the conditions in (16).
Proposition 3. Given the optimal control problem,
with fixed time t
f
and fixed final condition on the state
x(t
f
) = x
f
, for a non linear dynamics of the form (36)
and the cost function (4) with L(x, u,t) = α
T
1
x
1
+ cu,
α
1
∈ R
r
, there exists an algorithm for the computa-
tion of the optimal singular solution which gives the
expression of the control law as a pure state feed-
back, bringing to a bang–singular–bang optimal con-
trol, for which the singular surface can be explicitly
written as a state function only.
Proof: The presence of constraint (5) does not allow
to know λ(t
f
) due to expression (10). However,
˙
λ
2
=
0 is still true and then one has λ
2
(t) = λ
2
(t
f
) = const.
In this case equations (42), (43), (44) assume the form
G
(0)
(x, λ) = λ
T
1
g
1
(x
1
) + λ
T
2
(t
f
)g
2
(x
1
) = 0 (49)
G
(1)
(x, λ) = λ
T
1
ad
f
1
g
1
(x
1
) − α
T
1
g
1
(x
1
) +
+λ
T
2
(t
f
)[ f
2
, g
2
](x
1
) = 0 (50)
. . . = . . .
G
(r−1)
(x, λ) = λ
T
1
ad
r−1
f
1
g
1
(x
1
) + h
r−1
(λ
2
(t
f
), x
1
)
(51)
The same considerations as in the proof of Propo-
sition (2) can be carried on, computing λ
1
as in (45),
whose expression in this case is λ
1
(λ
2
(t
f
), x
1
). Both
the singular control u
s
and the singular surface (47)
can be computed, as in the proof of Proposition 2,
as function of x
1
but they results to be parametrised
by λ
2
(t
f
). The same follows for x
2
(t). However, the
imposition of condition (5) allows to determine the
actual values for λ
2
(t
f
), so getting again the full com-
putation of the singular solution u
s
= u
s
(x
1
) and of
the singular state space surface. The full knowledge
of all the state and control variables at t = t
f
allows to
obtain the value K from the evaluation of (13) at the
final time, as for the previous Proposition.
The last case here addressed refers to a free time
fixed final conditions on the state variables. It is pos-
sible to state the following
Proposition 4. Given the optimal control problem,
with free final time t
f
and the constraint (5) for the
final conditions on the state, for a non linear dyna-
mics of the form (36) and the cost function (4) with
L(x, u,t) = α
T
1
x
1
+ cu, α
1
∈ R
r
, there exists an algo-
rithm for the computation of the optimal singular so-
lution which gives the expression of the control law as
a pure state feedback, bringing to a bang–singular–
bang optimal control, for which the singular surface
can be explicitly written as a state function only.
Proof: The proof comes straightforwardly from the
one of Proposition 3, since the only difference is in
the fact that being the final time t
f
free, K in (8) and
in all the derived expressions, as far as (47), is equal
to zero. All the other considerations still hold.
The procedure is illustrated in next Section ma-
king reference to a classical SIR epidemic diffusion,
for which several optimal control approaches can be
found in literature.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
340

4 EXAMPLE
With reference to the general formulation introduced
in Section 2, it is now considered the classical mathe-
matical model describing the SIR epidemic spread
˙
S = −βSI −Su + µ (52)
˙
I = βSI − γI (53)
˙
R = γI (54)
with given initial conditions S
0
, I
0
, R
0
, and box con-
straints u(t) ∈ [0, u
MAX
], for which the control law
u(t) minimising the cost function
J(S(t), I(t), R(t), u(t)) =
Z
t
f
t
0
(aI(t) + cu(t))dt (55)
has to be found. t
f
is assumed fixed. The aim of the
control action is to minimize the number of infected
subjects I in the fixed time interval [0, t
f
] by using as
less resources as possible; the positive parameters a
and c represent the weights of these two contrasting
requirements.
Setting
x =
x
1
x
2
with x
1
=
S
I
and x
2
= R (56)
the formulation corresponds to the case considered
in Proposition 2, with r = 2, α
T
1
=
0 a
, α
T
=
α
T
1
0
and
f
1
(x
1
) =
−βSI + µ
βSI − γI
g
1
(x
1
) =
−S
0
f
2
(x
1
) = γI g
2
(x
1
) = 0
(57)
Introducing
λ =
λ
1
λ
2
with λ
1
∈ R
2
and λ
2
∈ R (58)
the Hamiltonian (13) can be written as
H(x, λ, u) = α
T
1
x
1
+ cu + λ
T
1
f
1
(x
1
) + λ
2
f
2
(x
1
) +
+λ
T
1
g
1
(x
1
)u =
= α
T
1
x
1
+ λ
T
1
f
1
(x
1
) + λ
2
f
2
(x
1
) +
+
c + λ
T
1
g
1
(x
1
)
u =
= F(x, λ) + G(x, λ)u (59)
with
F(x, λ) = α
T
1
x
1
+ λ
T
1
f
1
(x
1
) + λ
2
f
2
(x
1
) (60)
G(x, λ) = c + λ
T
1
g
1
(x
1
) (61)
and for which
H(x, λ, u) = K ∀t ∈ [t
0
,t
f
], K ∈ R (62)
The costate dynamics (40) and (41) for λ can be
computed, getting
˙
λ
1
= −
0
a
−
−βI βI
−βS βS − γ
λ
1
+
−u
−1 0
0 0
λ
1
−
0
γ
λ
2
(63)
˙
λ
2
= 0 (64)
with λ(t
f
) = 0 from the free final state x condition.
Then, as expected, from (64) one has λ
2
(t) = 0.
The computation of ad
f
1
g
1
(x
1
) yields
ad
f
1
g
1
(x
1
) =
βSI − µ
0
−
βSI
−βSI
=
−µ
βSI
(65)
so that expressions (49) and (50) assume the form
G
(0)
(x, λ) = c + λ
T
1
−S
0
= 0 (66)
G
(1)
(x, λ) = λ
T
1
−µ
βSI
= 0 (67)
from which the variable λ
1
can be computed, as a
function of x
1
=
S I
T
, obtaining
λ
1
=
−S 0
−µ βSI
−1
−c
0
=
c
S
µc
βS
2
I
(68)
The expression for G
(2)
(x, λ) can be computed as
G
(2)
(x, λ) = λ
T
1
ad
2
f
1
g
1
(x
1
) − α
T
1
ad
f
1
g
1
(x
1
) +
+uλ
T
1
ad
g
1
ad
f
1
g
1
(x
1
) (69)
from which the singular control
u
s
(x, λ) =
λ
T
1
ad
2
f
1
g
1
(x
1
) − α
T
1
ad
f
1
g
1
(x
1
)
λ
T
1
ad
g
1
ad
f
1
g
1
(x
1
)
(70)
is obtained. Computing
ad
2
f
1
g
1
(x
1
) =
−βµI + β
2
S
2
I
−β
2
SI
2
+ 2βµI
(71)
ad
g
1
ad
f
1
ad
g
1
(x
1
) =
−µ
−βSI
(72)
in (70), and making use of (68), the state feedback
singular control
u
s
(x) =
aβSI − β
2
cSI +
2βcµI
S
−
2cµ
2
S
2
−2
cµ
S
=
= βI
βc − a
2cµ
S
2
− 1
+
µ
S
(73)
is computed. Then, the full state feedback control law
(19) is obtained.
State Feedback Optimal Control with Singular Solution for a Class of Nonlinear Dynamics
341
From (60), according to (46) and (47), one has for
the singular surface
0 a
S
I
+
c
S
µc
βS
2
I
−βSI + µ
βSI − γI
=
aI − βcI +2
cµ
S
−
cγµ
βS
2
= K (74)
Finally, from (48),
K = aI(t
f
) (75)
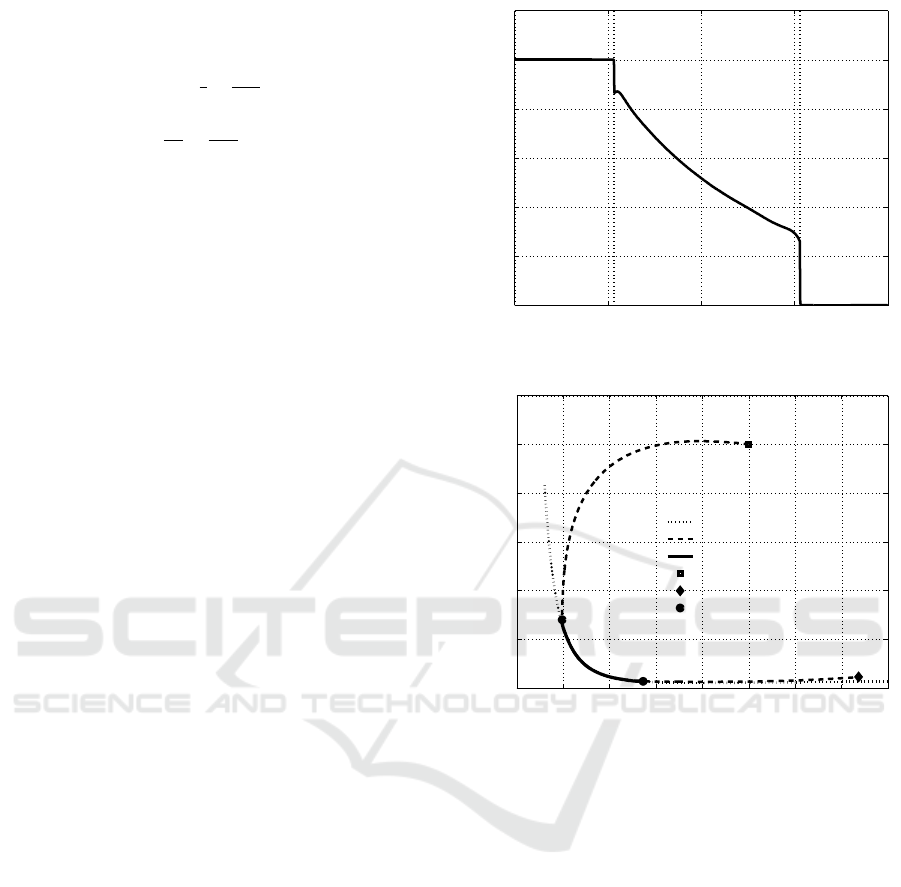
The time history of the bang-singular-bang control
is depicted in Figure 1, where the time instant t = 5.32
in which it switches from the constant value u
MAX
= 1
to u
s
, and the time t = 15.3, in which it switches from
u
s
to
min
= 0 are evidenced by the two vertical dotted
lines. The corresponding state evolution is represen-
ted in Figure 2 for the x
1
–x
2
plane projection: the ini-
tial part of the trajectory from the starting conditions
x
1,0
= 50 and x
2,0
= 10, the squared point, to the inter-
section with the singular curve (dotted line), denoted
by a dashed curve, represents the evolution under the
upper bound value for the control. Then, under the
singular control (73), the trajectory follows the singu-
lar curve along the solid arc, until the second switch
from u = u
s
to u = u
min
= 0 occurs, yielding to the
free evolution from the singular arc to the final point
(diamond marker).
The simulation has been performed setting t
f
=
20, fixing the model parameters to β = 0.01, γ = 0.4
and µ = 10 and choosing the weights α = 1 and c = 1
in the cost function (55).
5 CONCLUSIONS
Sufficient conditions under which the solution of a
singular optimal control problem can be directly ex-
pressed as a state feedback law are provided, allowing
its computation by means of a simple forward integra-
tion of the system dynamics only. The class addressed
can be enriched, preserving the results, requiring the
introduction of some integrability properties for trian-
gular and sub triangular structure; this analysis is the
object of a forthcoming work.
ACKNOWLEDGEMENTS
This work was supported by Sapienza University
of Rome, Grants No. RP11715C82440B12 and
No. 191/2016.
0 5 10 15 20
0
0.2
0.4
0.6
0.8
1
Time t
u(t)
Figure 1: The Bang–Singular–Bang optimal control u(t).
0 10 20 30 40 50 60 70 80
0
2
4
6
8
10
12
x
1
(t)
x
2
(t)
Singular curve SC
State trajectory
Trajectory on the SC
Initial condition
Final condition
Switching points
Figure 2: State trajectory in the x
1
–x
2
plane, compared with
the singular curve.
REFERENCES
Athans, M. and Falb, P. (1996). Optimal Control. McGraw-
Hill, Inc., New York.
Bakare, E., Nwagwo, A., and Danso-Addo, E. (2014). Op-
timal control analyis of an sir epidemic model with
constant recruitment. International Journal of App-
lied Mathematical Research, 3.
Behncke, H. (2000). Optimal control of deterministic epi-
demics. Optimal control applications and methods,
21.
Bryson, A. and Ho, Y. (1969). Applied optimal control:
optimization, estimation, and control.
Di Giamberardino, P., Compagnucci, L., Giorgi, C. D., and
Iacoviello, D. (2018). Modeling the effects of pre-
vention and early diagnosis on hiv/aids infection dif-
fusion. IEEE Transactions on Systems, Man and Cy-
bernetics: Systems.
Di Giamberardino, P. and Iacoviello, D. (2017). Optimal
control of SIR epidemic model with state dependent
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
342

switching cost index. Biomedical Signal Processing
and Control, 31.
Fraser-Andrews, G. (1989). Finding candidate singular op-
timal controls: a state of art survey. Journal of Opti-
mization Theory and Applications, 60.
Hartl, R., Sethi, S., and Vickson, R. (1995). A survey of
the maximum principles for optimal control problems
with state constraints. Society for Industrial and App-
lied Mathematics, 37:181–218.
Johnson, C. and Gibson, J. (1963). Singular solutions in
problems of optimal control. IEEE Trans. on Automa-
tic Control, 8(1):4–15.
Ledzewicz, U., Aghaee, M., and Schattler, H. (2016). Opti-
mal control for a sir epidemiological model withtime-
varying population. 2016 IEEE Conference on Cont-
rol Applications.
Ledzewicz, U. and Schattler, E. (2011). On optimal singu-
lar controls for a general SIR-model with vaccination
and treatment. Discrete and continuous dynamical sy-
stems.
Vossen, G. (2010). Switching time optimization for bang-
bang and singular controls. Journal of Optimization
Theory and Applications, 144.
State Feedback Optimal Control with Singular Solution for a Class of Nonlinear Dynamics
343
