Knee Rehabilitation Device with Soft Actuation: An Approach to the
Motion Control
Leonardo Solaque, Marianne Romero and Alexandra Velasco
Universidad Militar Nueva Granada-Mechatronics Engineering Department, Bogota, Colombia
Keywords:
Feedback and Feedforward Control, Knee Rehabilitation Device, Soft Actuation.
Abstract:
Assistive devices in rehabilitation have gained much attention in robotics research. Recent actuation systems
include compliant elements to provide advantages as natural motions and safety in the interaction with humans.
These are the so-called soft actuators, among which there are series elastic actuators (SEA) and variable
stiffness actuators (VSA). On the other hand, control strategies are required in order to accomplish desired
tasks in a proper manner. In rehabilitation systems this is to reproduce a desired motion without affecting the
patient, so the control system is crucial. In this paper, we present a control strategy for a knee rehabilitation
device, with soft actuation. The goal is to control the system while maintaining the intrinsic softness of the
system when the patient is in the rehabilitation process. We propose a feedback control strategy, acting in
a defined threshold to maintain the stiffness of the system, combined with a feedforward decision control to
reject disturbances.
1 INTRODUCTION
In recent years there has been an increasing need for
physical therapy for different reasons. E.g., accord-
ing to the World’ Health Organization
1
near 15% of
world’s population has some disability caused by ac-
cidents, chronic diseases, or other conditions. Be-
sides, people of all ages practice sports frequently to
maintain their quality of life, but in this way, they are
more exposed to joint injuries.
Any case of impairment or injury requires reha-
bilitation to reduce pain, to improve or to maintain
the remaining functional and structural characteris-
tics of the musculoskeletal system. Rehabilitation in-
cludes several practices that aim to recover functions
that have been lost or diminished by a disease or ac-
cident, though we will specifically refer to physical
rehabilitation of the knee (Andrade et al., 2014). Ac-
cording to (Jensen and Lorish, 1994), not all the pa-
tients comply with the physical treatments prescribed
due to costs, difficulty to reach the physiotherapy’s
place, and so on. On the other hand, performing the
exercises correctly might also be challenging due to
the pain, the lack of strength and the lack of range of
mobility, not to mention the risks for the physiothera-
pist when assisting some patients. For these reasons,
1
http://www.who.int/
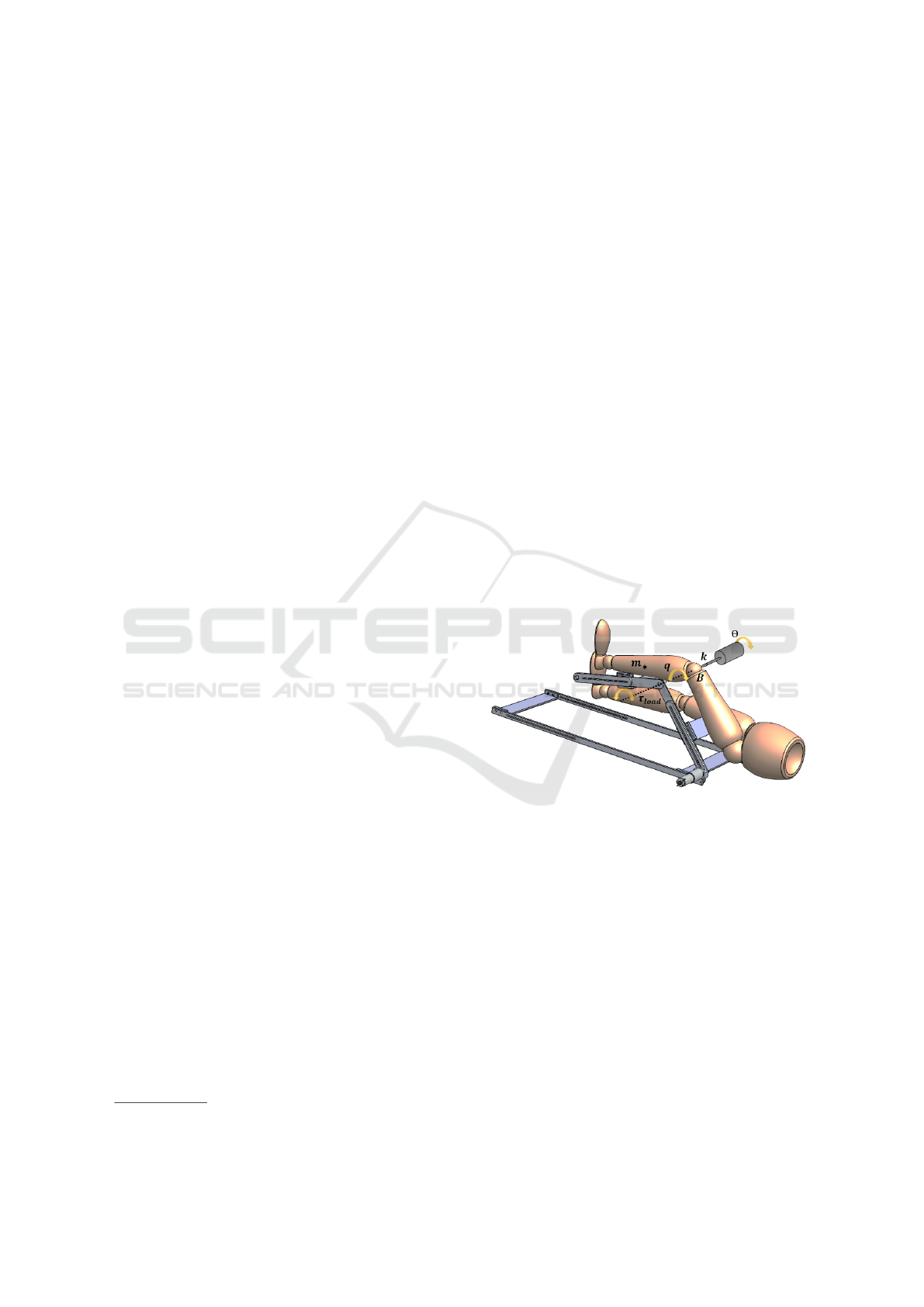
Figure 1: Model representation for knee rehabilitation.
recent studies aim to contribute to improve the avail-
ability and effectiveness of physical therapy, as well
as to reduce risks to the physiotherapist, by design-
ing assistive rehabilitation devices. In the last years,
devices for upper limb (see e.g. (Balasubramanian
et al., 2008) or (Mghames et al., 2017)), and for lower
limb rehabilitation have notably increased. Other ex-
amples are presented in (Koller-Hodac et al., 2010),
(Rifa
¨
ı et al., 2017) or (Vouga et al., 2017). The re-
quirements are specific, i.e. safety, natural motions.
In this sense, the actuation system is a key for robotic
devices. Regarding the requirements for rehabilita-
tion, the so-called soft actuators are used in recent de-
velopments due to the advantages that they provide
(Grioli et al., 2015).
A general concern in robotic devices, and partic-
156
Solaque, L., Romero, M. and Velasco, A.
Knee Rehabilitation Device with Soft Actuation: An Approach to the Motion Control.
DOI: 10.5220/0006861001560162
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 156-162
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ularly when intended to use in applications that in-
volve interaction with humans, e.g. in rehabilitation,
is the control strategy to assure that the system is per-
forming the task with the required specifications, e.g.
zero tracking error. Classical control strategies, based
on feedback compensation are effective for this pur-
pose, however, they modify the system dynamics. Ac-
cording to (Della-Santina et al., 2017), these strate-
gies may cancel the compliant dynamics, eliminat-
ing the desired intrinsic characteristics of soft actua-
tion. In (Della-Santina et al., 2017) authors show that
an anticipative model of human motor control, using
a feedforward action, combined with low-gain feed-
back, can be used to achieve human-like behavior in
soft actuated devices. Following this idea, we intro-
duce a control strategy that does not cancel the com-
pliant dynamics, based on the combination of feed-
forward and feedback actions, oriented to control the
motion of a soft actuated knee rehabilitation device.
In the literature there are other works that tackle prob-
lems related to the control of rehabilitation devices.
For instance, (Witte et al., 2017), presents a closed
loop torque control using classical proportional feed-
back control with damping injection in conjunction
with iterative learning a knee exoskeleton. According
to (Grioli et al., 2015) and (Della-Santina et al., 2017)
many efforts have been done to control soft actuated
systems, as for example PD control strategies (De-
Luca and Flacco, 2011), feedback linearization (Pe-
tit and Albu-Schffer, 2011), backstepping (Petit et al.,
2015) immersion and invariance theories (Wimboeck
et al., 2010), optimal control (Ozparpucu and Albu-
Schaffer, 2014), and so on.
Regarding rehabilitation devices that use compli-
ant actuation and require a control strategy, some ap-
proaches are available. For instance, the control of
an assistive orthopedic system for rehabilitation based
on inherent compliant actuators has been presented in
(Wilkening et al., 2011). In (Mghames et al., 2017) a
one degree of freedom assistive platform to augment
the strength of upper limbs with VSA is presented.
Authors aim to control the system in feedforward by
mapping the Electromyographic signals (from mus-
cle activation), to exploit the muscle-like dynamics of
the mechanical device. However, a complete analysis
of the control problem for the system is left as future
work.
Furthermore, a compliant actuated parallel ankle
rehabilitation robot is presented in (Jamwal et al.,
2016). The robot allows the patients to modify the
robot motions according to their own level of dis-
ability by applying the strategy of interactive training
based on impedance control. This control scheme is
dependent on the therapists decision, therefore auto-
matic adaptation between impedance control modes
with low and high compliance is required.
In (Romero A. et al., 2017), a 5-bars-linkage un-
deractuated device for knee rehabilitation, using VSA
was presented, as shown in Fig.1. A control strategy
is required for the latter system, to perform desired
routines for knee rehabilitation. To gain an insight
of the control strategy and the requirements, we will
first consider a one-Degree-of-Freedom (DoF) model.
In this way, here we define the control specifications
from the patient’s point of view, to perform a desired
motion during knee rehabilitation therapy. We pro-
pose a control strategy for the one DoF soft actuated
device, with the aim to maintain the intrinsic dynamic
properties of the system in order to exploit its advan-
tages. Results show that the global control strategy
proposed which combines feedback and feedforward
position control strategy, satisfies the conditions pre-
sented in (Della-Santina et al., 2017), allowing main-
tain the intrinsic softness of the system, while achiev-
ing the requirements of the one DoF system, i.e. com-
pensating with the feedforward strategy the distur-
bances due to the leg’s weight, keeping the stability
of the system. When approaching the 80% of the ref-
erence, we switch the control parameters in order to
have a lower velocity near to the reference. In future
works, we will study the validity of the control strat-
egy in the 5-bars-linkage-rehabilitation device.
2 DEVICE MODELING
APPROACH
This paper tackles an approach to controlling a soft-
actuated rehabilitation device - see Fig.1.
Figure 2: Model representation for knee rehabilitation.
To gain an insight of the control system behavior,
and taking into account that our scope is to control the
knee joint of the proposed assistive rehabilitation de-
vice, we will consider a one-DoF soft actuated model,
which represents the knee joint, as shown in Fig.2, de-
fined by
˙q = ω
q
,
˙
ω
q
=
1
M
(−kq − Bω
q
+ kθ + τ
load
)
(1)
Knee Rehabilitation Device with Soft Actuation: An Approach to the Motion Control
157

where q and ω
q
are the link (calf) angular position
and angular velocity respectively; θ is the rotor (knee
join) angular position, which is considered as an input
to our system; τ
load
is the load torque, and M, k, B
are the mass, the stiffness and damping of the system,
respectively. Consider that the vector state is defined
as X = [q, ω
q
]
T
.
In this paper we aim to control the link angular
position of the knee rehabilitation device, to comply
with defined repetitive motions. It is worth to mention
that the soft actuators considered for the design have
a low level PD control that assures that the desired ro-
tor’s angular position is indeed the input angular po-
sition
2
θ.
3 COMBINED FEEDBACK AND
FEEDFORWARD CONTROL
STRATEGY
In this section we present the design of the combined
feedback and feedforward strategy, as shown in Fig.
3. We first describe the control strategy requirements
based on the desired behavior of the patient’s knee
motion; then, we present the control law proposed.
3.1 Control Requirements
Let us describe Fig. 3. According to physical ther-
apy indications (Umivale, 2011), the control law must
keep the output position close to the desired reference
with a smooth approach, so the Reference Block pro-
vides a saturated reference. In this case, the reference
is the motor’s angular position θ. Then, the saturated
reference must be smooth in order to reach it with a
soft response, i.e. similar to an overdamped system.
Furthermore, the Feedback Block has an integral ac-
tion that ensures that the system follows the desired
reference and that disturbances are rejected.
The control strategy includes a feedforward ac-
tion such that loading disturbances are compensated.
Then, the Decision System Block acts as follows.
When the system, i.e. the knee approaches to the fi-
nal value, over a threshold of 20%, the speed with
which it approaches to the reference is lower. This
is done because when performing rehabilitation train-
ing, the patient slowers in the critical angular posi-
tions, according to physiotherapists criterion. If the
force exerted by the patient is over the threshold, (e.g.
because the patient is in pain), the system will send a
zero reference to relax the patient’s leg.
2
http://www.qbrobotics.com/
3.2 Control Design
Now, let us focus on the control design for the knee
rehabilitation assistive device. Based on pole place-
ment, we use low gains to approach the natural behav-
ior of the human motion, when performing exercises
to stretch and strengthen the knee muscles, guided by
a physiotherapist.
Consider the linear model of the system in (1).
Defining k
1
, k
2
which are respectively the gain of the
angular position q; the gain of the angular velocity
w
q
. Furthermore, defining k
i
as the gain of ξ, where
˙
ξ = R − q; R is the desired knee angular position of
the rehabilitation system. Then, the feedback control
law is defined by
θ = k[k
2
ω
q
+ k
1
q + k
i
ξ]. (2)
Let us assume that the system is in equilibrium, this
is τ
load
= 0. Then, the closed-loop dynamics are
q(s)
R(s)
=
k
i
k
Ms
3
+ s
2
(B − kk
2
) + s(k − kk
1
) + k
i
k
. (3)
Here we assure that the feedback design, i.e. det(SI −
A
∗
)=0, is Hurwitz to tune the control coefficients, so
the system is stable (pole placement). In a practical
way, these coefficients modify the system dynamics.
So to maintain the intrinsic dynamics of the system,
i.e. the stiffness, the changes have to be such that the
system response is close to the natural response. Ac-
cording to (Della-Santina et al., 2017), a low-gain of
the feedback controller is required in order to have lit-
tle stiffness alteration in the model. The main differ-
ence, and the contribution of this proposal is that we
focus on the control design specifications for a soft
actuated knee rehabilitation device (i.e. actuated by
SEA or VSA), applying the sufficient condition de-
rived in the previously mentioned work. The aim here
is to maintain the intrinsic characteristics of the actu-
ation system, this is to keep σ proportional to q − θ.
Regarding stiffness, it is defined as
∂T (q−θ,σ)
∂q
,
where T (q − θ, σ) is the torque due to the compliant
element at the joint, and σ is a parameter used to set
joint stiffness in variable stiffness actuators. For the
design of the position controller presented in this pa-
per, we consider a constant stiffness.
In order to minimize the changes in the physical
compliance, the stiffness value in closed loop has to
remain in a δ-neighborhood of the value in the open
loop, along the system reference signal. Then, let us
consider that our controller is θ(q, ˙q,t, σ,r, ξ) as in
(2). Then, the partial derivative
∂θ(·)
∂q
results in the
controller coefficients. Consider also that the natu-
ral stiffness along the system reference is defined as
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
158
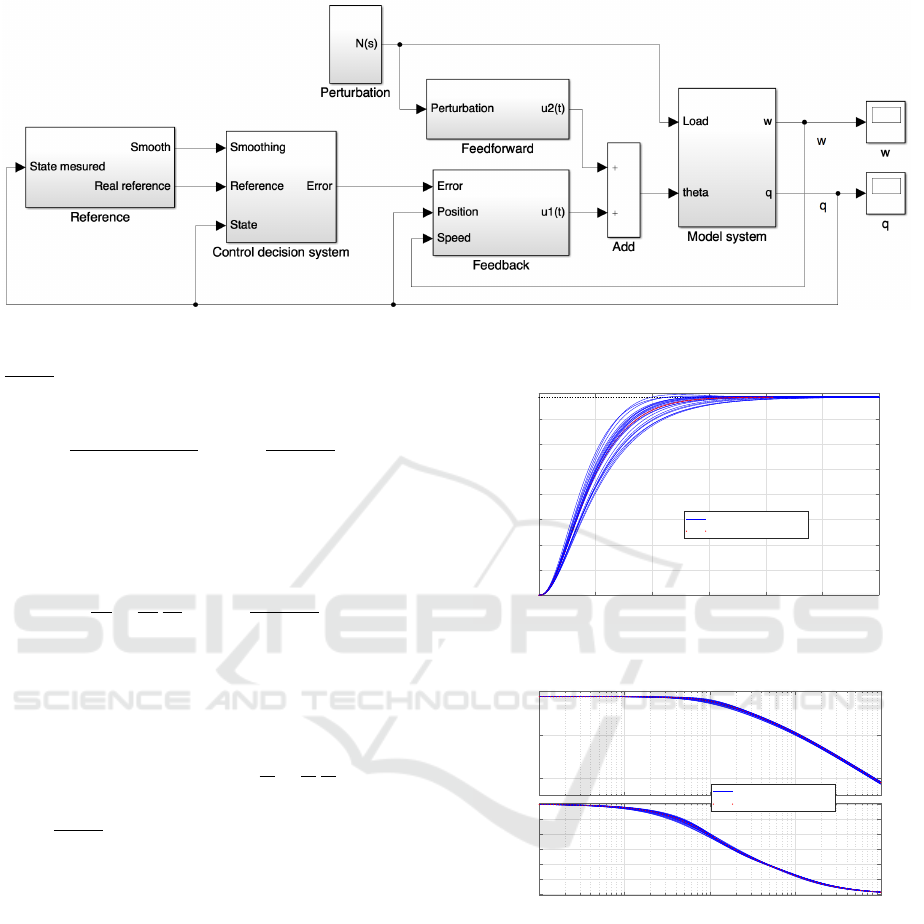
Figure 3: Control structure used in the rehabilitation system.
∂T (0,σ)
∂q
, then, the sufficient condition to maintain the
system stiffness is verified. In this case it is
k
∂θ(q, ˙q,t,σ, r,ξ)
∂q
k≤ δ k
∂T (0,σ)
∂q
k
−1
, (4)
where r is the reference trajectory, R is the desired
knee angular position, and ξ is the integral action on
the error. When
˙
ξ = Π(q, ˙q,t, σ,r,ξ) exists (4) be-
comes
k
∂θ
∂q
+
∂θ
∂ξ
∂ξ
∂q
k≤ δ k
∂T (0,σ)
∂q
k
−1
(5)
The main idea of (5) is that the coefficients of
feedback part of the controller have to be sufficiently
small, so we need to evaluate these coefficients in the
case of the controller proposed here. If the right term
in (5) is zero, there will be no stiffness variation due
to the control action. This is k
∂θ
∂q
+
∂θ
∂ξ
∂ξ
∂q
k≤ 0. Re-
garding the controller designed in this case, it is true
that k
∂T (0,σ)
∂q
k
−1
= 0, which meets the sufficient con-
dition.
3.3 Controller Implementation
We choose k
1
, k
2
y k
i
sufficiently small, applying the
poles placement method, according to the following
criteria. Using a Robust Control Toolbox, we test the
system to tune these values, such that with a varia-
tion up to 20% of k
1
, and k
2
, and up to 30% of k
i
,
the system is stable and the design specifications are
met, i.e. low speed when approaching to the desired
angular position, keeping the intrinsic stiffness of the
system. Observe Figs. 4 and 5, which show respec-
tively in time and frequency domain that the system
is stable when there is a change of the control param-
eters.
In this way, the condition (4) is accomplished, as
well as the control objective. Therefore, the natural
0 20 40 60 80 100 120
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Uncertainty response
Nominal response
Step Response
Time (seconds)
Amplitude
Figure 4: Variation of control parameters - Step response.
-100
-50
0
Magnitude (dB)
10
-3
10
-2
10
-1
10
0
10
1
-270
-225
-180
-135
-90
-45
0
Phase (deg)
Uncertainty response
Nominal response
Bode Diagram
Frequency (rad/s)
Figure 5: Variation of control parameters - Bode of the sys-
tem.
motion achieved using soft actuation allows to per-
form assisted knee rehabilitation exercises. For the
design and validation of the derived control law, we
use a stiffness preset constant value of σ = 6 Nm/rad.
4 RESULTS AND DISCUSSION
To analyze the results of the control strategy for the
rehabilitation device, we design a test in simulation.
We consider that the rehabilitation system can be con-
Knee Rehabilitation Device with Soft Actuation: An Approach to the Motion Control
159
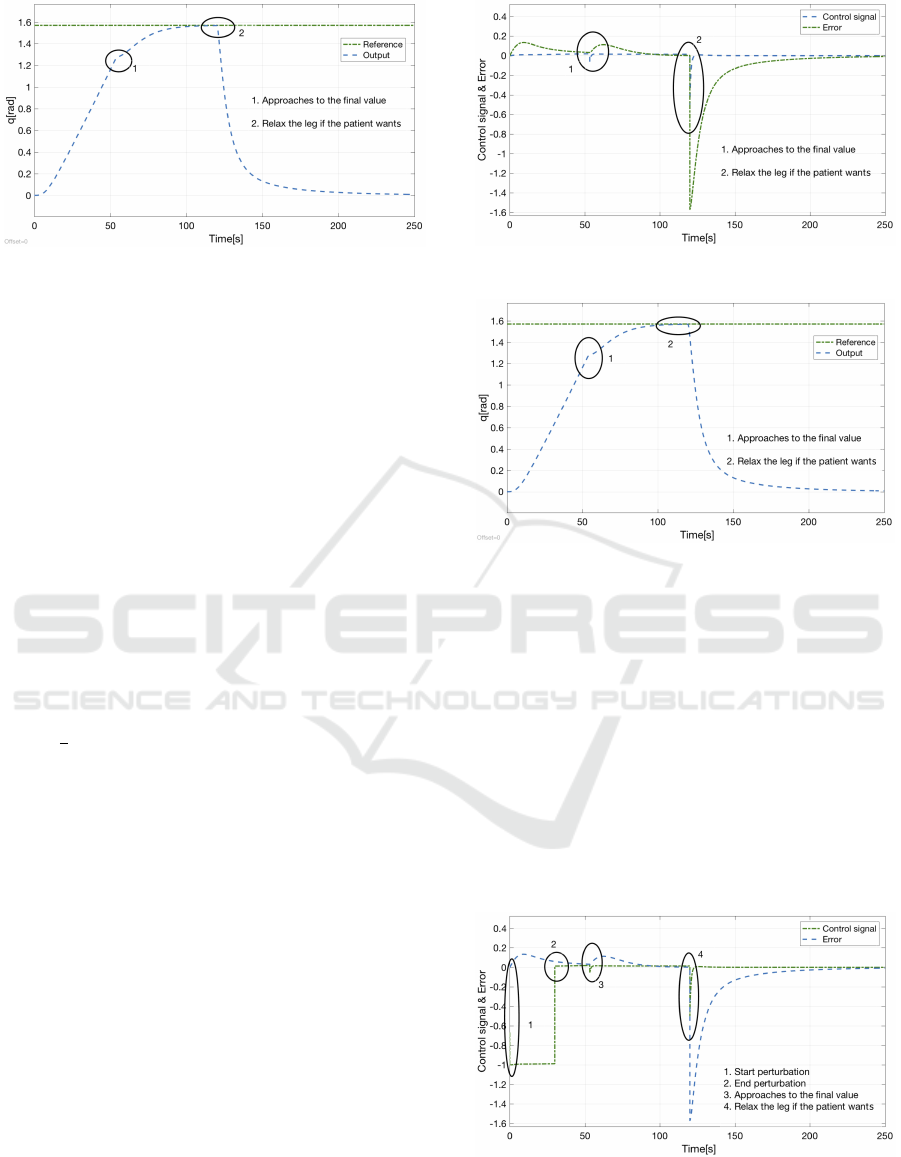
Figure 6: Tracking system.
figured for patients heights h between 1.40 m and
1.90 m, and weight W between 40 kg and 90 kg ac-
cording to mean normal adult population. Accord-
ing to anthropomorphic proportions we can establish
mean length and weight of the leg according to h
and W . For the simulations, the parameters corre-
spond to a subject of h = 1.60 m and W = 60 kg.
Besides, damping and stiffness are obtained experi-
mentally as B = 1 First, let us consider the feedback
action. According to the proposed strategy, we de-
fine the reference for the angular position that the
knee has to reach. When the angular position has
achieved 80% of the desired value, the structure of
the regulator changes by means of the integral action,
making the response slower, compared to the system
dynamics. It is worth to mention that the controller
was designed such that the stiffness is not affected, so
a change in the parameters will maintain this condi-
tion. Fig. 6 shows the system response to a reference
q
re f
=
π
2
rad. Notice that the output q follows the ref-
erence with zero tracking error. It is worth to mention
that the input to the control system is a saturated ref-
erence thus it is close to the real state of the system.
We observe that at time t = 190 s, when the output
reaches 80% of the final value, indeed the dynamic
changes and the motion becomes slower, as desired
(see point labeled as 1 in Fig. 6 ). Let us define that
after t = 300 s, the patient needs to stop the system
(e.g. because of pain), then we simulate this require-
ment as an stop. In this case, the system has to go
back to an initial configuration in order to relieve pain
(see point labeled as 2 in Fig. 6).
In fig. 7 we show the control and error sig-
nals. Observe that there are no overshoots nor strong
changes, keeping the system stable, guaranteeing a
smooth motion for the knee joint.
Now, let us consider the feedforward action. The
idea of this action is to reject disturbances. Then, we
test the system with a step signal perturbation µ(t)
which may represent for instance the corresponding
component of the leg’s weight, that is an available
measurement of the system. The signal µ(t) acts from
Figure 7: Input to the system and Error.
Figure 8: Tracking system with perturbation.
t = 0 s to t = 100 s. In fig.8, the results of the control
action are presented. Observe that the system perfor-
mance with the disturbance is close to that when there
is no disturbance, and that the response recovery starts
at t = 0 s (see point labeled as 1 in fig.8). At the end of
the disturbance, at t = 100 s the system recovers and
continues to operate normally, as desired (see point
labeled as 2 in fig.8).
Referring to the control signals, due to the com-
pliant behavior of the system it presents oscillations,
which are properly compensated. These oscillations
are due to the natural behavior of the system using
soft actuation.
Figure 9: Input to the system and Error with perturbation.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
160

5 CONCLUSION
In this paper, we have presented a global control strat-
egy that combines feedforward and feedback actions
for a soft actuated knee rehabilitation device. The de-
signed device is a 5-bars-linkage underactuated sys-
tem. However, to gain an insight of the control strat-
egy and the requirements, we have presented an ap-
proach to control a soft-actuated-one DoF system,
when performing the desired motion during physical
knee rehabilitation. The specific requirements of the
system, that we have proved to achieve with the pro-
posed combined control strategy are to keep intrinsic
stiffness of the system, stability, low velocity when
approaching to the reference, and disturbance rejec-
tion. The feedforward strategy compensates loading
disturbances while the feedback strategy acts in a de-
fined threshold to maintain the stiffness of the sys-
tem. When approaching the 80% of the reference,
we switch the control parameters in order to have a
lower velocity near to the reference, meeting the de-
sired specifications. In future works, we will study the
validity of the control strategy in the 5-bars-linkage-
rehabilitation device.
ACKNOWLEDGMENT
This work is funded by Universidad Militar Nueva
Granada- Vicerrector
´
ıa de Investigaciones, under
research grant for project IMP-ING-2291, entitled
’Dise
˜
no de un prototipo para rehabilitaci
´
on de rodilla
mediante el uso de actuadores flexibles’.
REFERENCES
Andrade, A. O., Pereira, A. A., Walter, S., Almeida, R.,
Loureiro, R., Compagna, D., and Kyberd, P. J. (2014).
Bridging the gap between robotic technology and
health care. Biomedical Signal Processing and Con-
trol, 10:65 – 78.
Balasubramanian, S., Wei, R., Perez, M., Shepard, B.,
Koeneman, E., Koeneman, J., and He, J. (2008). Ru-
pert: An exoskeleton robot for assisting rehabilita-
tion of arm functions. In 2008 Virtual Rehabilitation,
pages 163–167.
De-Luca, A. and Flacco, F. (2011). A pd-type regulator
with exact gravity cancellation for robots with flexi-
ble joints. In 2011 IEEE International Conference on
Robotics and Automation, pages 317–323.
Della-Santina, C., Bianchi, M., Grioli, G., Angelini, F.,
Catalano, M. G., Garabini, M., and Bicchi, A. (2017).
Controlling soft robots: Balancing feedback and feed-
forward elements. IEEE Robot. Automat. Mag.,
24(3):75–83.
Grioli, G., Wolf, S., Garabini, M., Catalano, M., Burdet,
E., Caldwell, D., Carloni, R., Friedl, W., Greben-
stein, M., Laffranchi, M., Lefeber, D., Stramigioli, S.,
Tsagarakis, N., van Damme, M., Vanderborght, B.,
Albu-Schaeffer, A., and Bicchi, A. (2015). Variable
stiffness actuators: The user?s point of view. The In-
ternational Journal of Robotics Research, 34(6):727–
743.
Jamwal, P. K., Hussain, S., Ghayesh, M. H., and Rogozina,
S. V. (2016). Impedance control of an intrinsically
compliant parallel ankle rehabilitation robot. IEEE
Transactions on Industrial Electronics, 63(6):3638–
3647.
Jensen, G. M. and Lorish, C. D. (1994). Promoting pa-
tient cooperation with exercise programs. linking re-
search, theory, and practice. Arthritis and Rheuma-
tism, 7:181–189.
Koller-Hodac, A., Leonardo, D., Walpen, S., and Felder,
D. (2010). A novel robotic device for knee rehabil-
itation improved physical therapy through automated
process. In 2010 3rd IEEE RAS EMBS International
Conference on Biomedical Robotics and Biomecha-
tronics, pages 820–824.
Mghames, S., Laghi, M., Santina, C. D., Garabini, M.,
Catalano, M., Grioli, G., and Bicchi, A. (2017). De-
sign, control and validation of the variable stiffness
exoskeleton flexo. In 2017 International Conference
on Rehabilitation Robotics (ICORR), pages 539–546.
Ozparpucu, M. C. and Albu-Schaffer, A. (2014). Optimal
control strategies for maximizing the performance of
variable stiffness joints with nonlinear springs. In 53rd
IEEE Conference on Decision and Control, pages
1409–1416.
Petit, F. and Albu-Schffer, A. (2011). State feedback damp-
ing control for a multi dof variable stiffness robot arm.
In 2011 IEEE International Conference on Robotics
and Automation, pages 5561–5567.
Petit, F., Daasch, A., and Albu-Schffer, A. (2015).
Backstepping control of variable stiffness robots.
IEEE Transactions on Control Systems Technology,
23(6):2195–2202.
Rifa
¨
ı, H., Mohammed, S., Djouani, K., and Amirat, Y.
(2017). Toward lower limbs functional rehabilitation
through a knee-joint exoskeleton. IEEE Transactions
on Control Systems Technology, 25(2):712–719.
Romero A., M. L., Valbuena, Y., Velasco, A., and Solaque,
L. (2017). Soft-actuated modular knee-rehabilitation
device: Proof of concept. In Proceedings of the Inter-
national Conference on Bioinformatics Research and
Applications 2017, ICBRA 2017, pages 71–78, New
York, NY, USA. ACM.
Umivale, P. S. (2011). Patolog
´
ıa de la rodilla: Gu
´
ıa de
manejo cl
´
ınico.
Vouga, T., Zhuang, K. Z., Olivier, J., Lebedev, M. A.,
Nicolelis, M. A. L., Bouri, M., and Bleuler, H. (2017).
Exio: A brain-controlled lower limb exoskeleton for
rhesus macaques. IEEE Transactions on Neural Sys-
tems and Rehabilitation Engineering, 25(2):131–141.
Knee Rehabilitation Device with Soft Actuation: An Approach to the Motion Control
161

Wilkening, A., Baiden, D., and Ivlev, O. (2011). Assis-
tive control of motion therapy devices based on pneu-
matic soft-actuators with rotary elastic chambers. In
2011 IEEE International Conference on Rehabilita-
tion Robotics, pages 1–6.
Wimboeck, T., Ott, C., and Hirzinger, G. (2010). Immersion
and invariance control for an antagonistic joint with
nonlinear mechanical stiffness. In 49th IEEE Con-
ference on Decision and Control (CDC), pages 1128–
1135.
Witte, K. A., Fatschel, A. M., and Collins, S. H. (2017). De-
sign of a lightweight, tethered, torque-controlled knee
exoskeleton. In 2017 International Conference on Re-
habilitation Robotics (ICORR), pages 1646–1653.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
162
