Automatic Planning of Manufacturing Processes using Spatial
Construction Plan Analysis and Extensible Heuristic Search
Ludwig N
¨
agele, Andreas Schierl, Alwin Hoffmann and Wolfgang Reif
Institute for Software & Systems Engineering, University of Augsburg, 86159 Augsburg, Germany
Keywords:
Manufacturing Planning, Construction Plan Analysis, Heuristic Planning.
Abstract:
When automating small-batch manufacturing processes, the time spent for process planning and robot pro-
gramming becomes more important. This paper proposes an automated process including construction plan
analysis, process planning and execution to reduce the amount of manual work required. The process starts
by analyzing the structure of the desired product and deriving required process step results, then uses heuristic
search to find possible production steps and task assignments, and concludes by simulating or executing the
resulting production plan. The approach is evaluated on a case study with a simulated robot automatically
building different LEGO
R
DUPLO
R
structures starting from a 3D model defining the desired product.
1 INTRODUCTION
When new products transfer from design to produc-
tion, not only the supply of resource materials has
to be ensured but also manufacturing processes have
to be defined that consist of many single production
steps. When automating production with robots to
reduce cost, a suitable robot cell configuration needs
to be provided, robots have to be programmed and
teached, end-effectors such as welding tongs are to be
integrated. Additionally, proper flow of production
parts through the manufacturing process is necessary.
Thus, before a product finally comes to produc-
tion, a lot of time-consuming work has to be per-
formed by engineers, technicians and programmers.
While this effort usually is profitable for high lot
sizes, the process and program definition for smaller
lot sizes or even single individual product manufac-
turing forms an enormous challenge to the producer.
In this paper, we present a modular approach for
automatic planning of manufacturing processes aim-
ing for speeding up the entire development process up
to the final robot program definition. In a first step, an
engineer’s construction plan is parsed and analyzed
to generate a structural model. From this model, pos-
sible process definitions and their order are derived
which describe manipulator independent manufactur-
ing steps. Appropriate robots are assigned to each
process step in order to form an executable action
as part of the final program. Besides, techniques are
used for optimizing both planning time and the result.
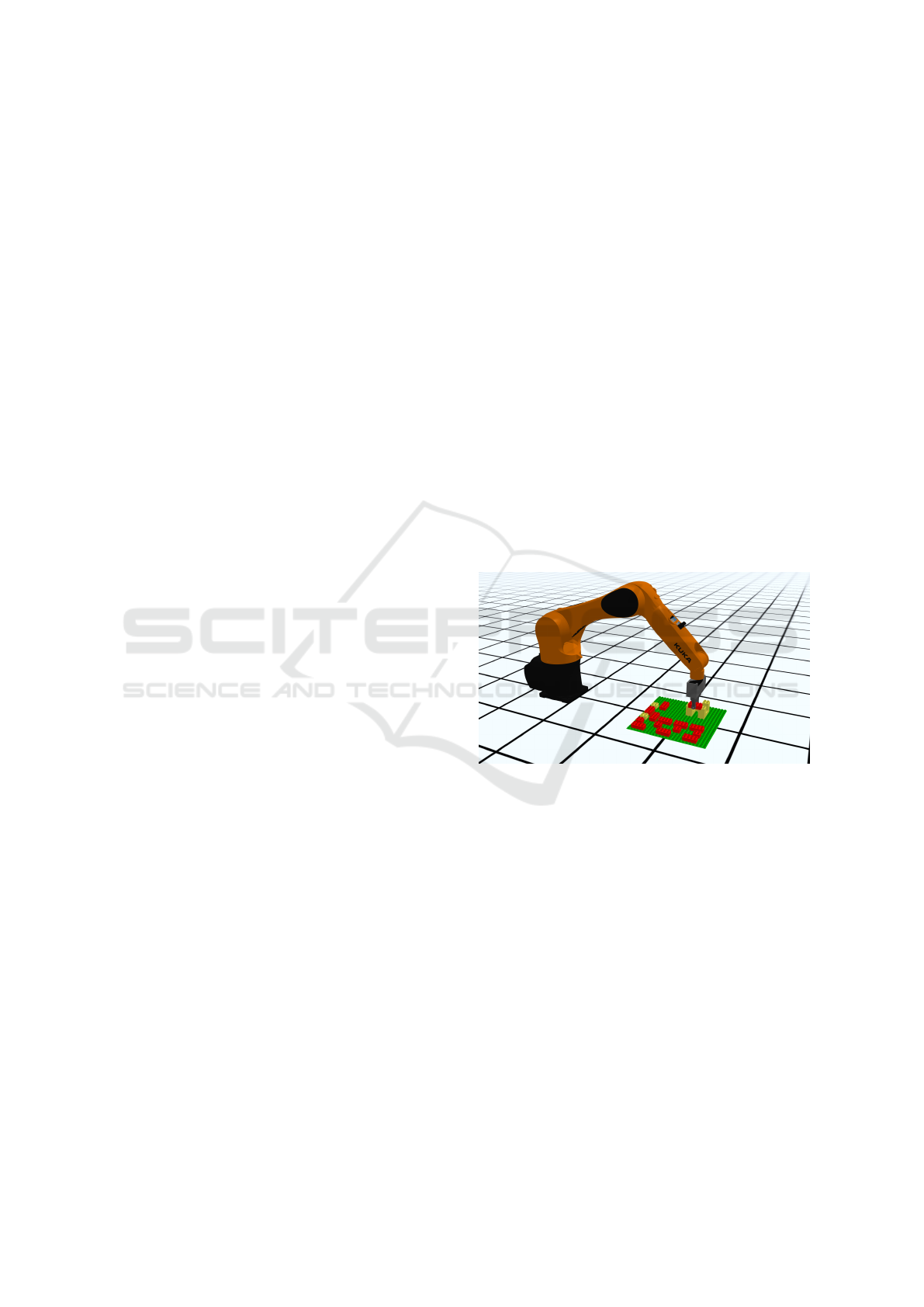
Figure 1: Simulated KUKA KR 6 robot and Schunk
WSG 50 gripper performing LEGO brick placement.
The approach is suitable for production of high lot
sizes just as for manufacturing unique products.
As a main contribution, the paper presents an ap-
proach for spatial analysis of a construction blueprint
resulting a detailed structure model of the product.
Furthermore, the work introduces a technique for de-
riving an optimized order of process steps necessary
for manufacturing a given structure model.
After an overview of other approaches to perform
automatic planning of manufacturing tasks in sec-
tion 2, an introduction to the case study with LEGO
R
DUPLO
R
is given in section 3 (see Fig. 1). Section 4
presents the elements and steps of the approach in de-
tail, followed by a description of the heuristics used
for finding proper sequences of process steps and for
planning with appropriate robots. As an evaluation
of the approach, its application to the LEGO domain
576
Nägele, L., Schierl, A., Hoffmann, A. and Reif, W.
Automatic Planning of Manufacturing Processes using Spatial Construction Plan Analysis and Extensible Heuristic Search.
DOI: 10.5220/0006861705760583
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 576-583
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

for building structures is presented in section 6. Ex-
perimental results from a survey of different heuristic
variants for the LEGO example are discussed in sec-
tion 7 before the work concludes in section 8.
2 RELATED WORK
Manufacturing and assembly with robots is still an
ongoing topic in research. Some approaches con-
centrate on discrete planning techniques to solve al-
location of resources and task assignment to spe-
cific robots. For this, the STRIPS planner developed
in Stanford (Fikes and Nilsson, 1971) and the Plan-
ning Domain Definition Language (PDDL) by Mc-
Dermott et al. (1998) which bases on STRIPS are
commonly used. In PDDL, physical entities are speci-
fied as objects and domain-specific predicates are de-
fined which hold situational properties of these ob-
jects. These predicates are used to describe an initial
state and a goal specification of the planning prob-
lem. With actions that are defined with preconditions
and are used to manipulate a situation by influencing
the value of predicates, the planning problem can be
solved. However, our planning domain is highly de-
pendent on geometric reasoning with pre- and post-
conditions calculated during planning time which is
difficult to express in PDDL.
In the european project SkillPro (Pfrommer et al.,
2015), skills are used to describe functionality of
available resources. Together with manufacturing re-
quirements of the final product, executable process
actions can be generated. While actions can be dy-
namically orchestrated and integrated into the manu-
facturing process at runtime, in our project we want to
focus on an overall optimization of the entire manu-
facturing process considering products’ as well as re-
sources’ characteristics and performances.
In the last few years a trend has evolved to con-
sider motion planning together with classical task
planning for robot based manufacturing. One ap-
proach by Kaelbling and Lozano-P
´
erez (2011) pro-
poses stepwise planning and execution of successive
actions in order to reduce complexity. Planning and
decomposition of tasks is done only in limited depth.
The intermediate results are then executed and plan-
ning on task level is subsequently continued based on
the new situation. In a further work, Levihn et al.
(2013) introduce concepts for foresight with a belief
state and reconsideration as improvements to their
first approach. For our project, we plan to integrate
the concept of interleaved execution while planning,
but use simulation techniques instead.
Many approaches exist which try to bring prede-
fined process steps to execution on a robot cell. But
researchers also pay attention to automatic definition
of process steps by raw construction models or 3D
data. In an approach where KUKA youbots are used
to assemble an IKEA furniture, Knepper et al. (2013)
present a geometric preplanning strategy to extract
a final assembly configuration (blueprint) from the
form and quantity of available parts. In a second step,
a symbolic planner is used to find a sequence of oper-
ations to assemble the blueprint. The presented sep-
aration of blueprint analysis, operation sequence ex-
amination and finally execution will be a paradigm for
our project.
In their work about an offline programming plat-
form for automatic programming of manufacturing
tasks in the domain of carbon fiber-reinforced poly-
mers (CFRP), N
¨
agele et al. (2015) present techniques
to derive executable robot programs from an initial
CAD model of the final product. The CAD model is
parsed and decomposed into a hierarchical task repre-
sentation with pre- and postconditions for each leaf.
The concept of task contribution units is introduced
in a further work by Macho et al. (2016) which al-
lows for dynamic planning of each task basing on a
set of various exchangeable modules. Such a mod-
ule can provide generic calculation functionality, ap-
ply domain-specific knowledge or involve interaction
with a human expert. While this offline programming
platform is mainly focused on the domain of CFRP
and the presented planning problem is almost sequen-
tial, the idea of parsing and analyzing some kind of
blueprint is taken as inspiration for our project.
3 CASE STUDY
Building up and programming manufacturing systems
often includes generic challenges on the one hand and
domain-specific problems on the other hand. As a
case study, an application in the domain of construc-
tion toy LEGO
R
DUPLO
R
is presented. Its inter-
changeable and often symmetric raster-sized bricks
keep domain-specific problems simple and allow for
focusing on generic challenges of automatized pro-
duction design.
In our first scenario, we use a base plate of 24×24
studs, 13 colored bricks with dimensions of 2 × 2
studs and 13 bricks with a raster of 2× 4 studs. As an
initial setup, all bricks are randomly placed planarly
on the base plate as shown in Fig. 2 with a minimum
distance of one raster width. The goal – the manufac-
turing product – is a yellow house topped with a red
roof, having a space for an entry door and a window
area on all three other sides (see Fig. 2).
Automatic Planning of Manufacturing Processes using Spatial Construction Plan Analysis and Extensible Heuristic Search
577
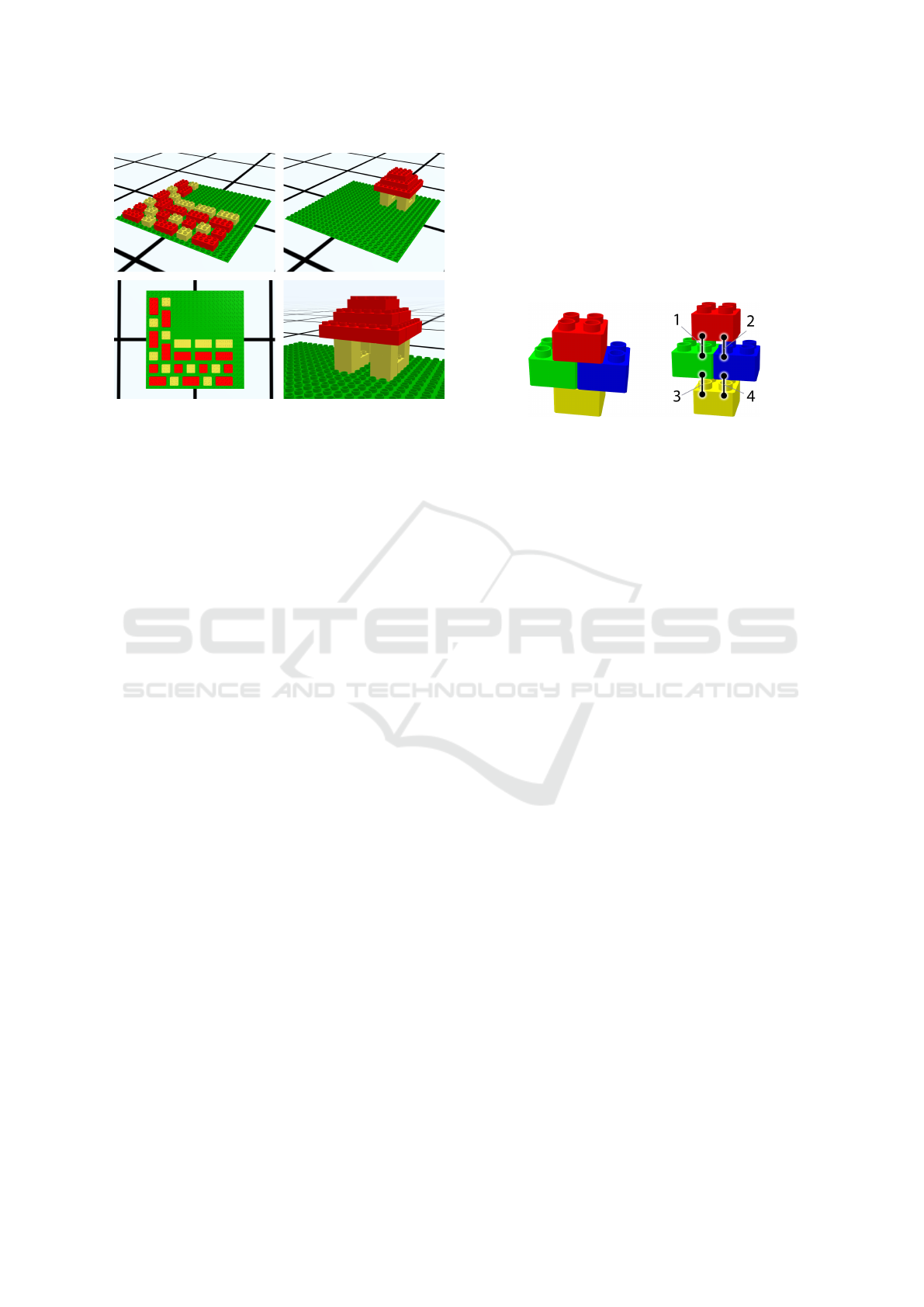
Figure 2: Initial setup (left) and goal structure (right) for
building up a LEGO house.
For manipulation, a KUKA KR 6 robot with a
mounted Schunk WSG 50 gripper is used. Both ac-
tuators, as well as all LEGO parts, are integrated in
the Robotics API (Angerer et al., 2013) which allows
for object-oriented behavior programming and pro-
vides visualization by an inbuilt engine. For evalu-
ating conceptual and algorithmic results of this paper,
the inbuilt simulation feature of the Robotics API is
used to execute actuator behavior (see Fig. 1).
4 APPROACH
One main challenge in automation of manufactur-
ing is to bring a construction plan (3D model, writ-
ten script, etc.) to a stable, efficient and at best
cost-optimal manufacturing program for a robot cell.
There are several development phases and decisions
which all influence the final result with respect to
quality, resource efficiency and performance of both
product and production system. We propose an ex-
tensible module based approach which is meant to
ease this task by automatic programming of such pro-
cesses. Different modules can be contributed to pro-
vide specific knowledge and computation, ranging
from automation expertise for programming robots
and process expertise regarding manipulation and ma-
terial behavior, over to detailed knowledge about the
specific application domain. The presented approach
splits the development of manufacturing programs
into four parts: structure analysis, process planning,
task assignment and simulation and execution.
4.1 Structure Analysis
The overall goal of structure analysis is to extract as
much information out of a given initial construction
plan as possible. We assume that a construction plan
describes all parts to be assembled as well as further
information such as their relative positions to each
other or applied treatments and processes. We name
such a piece of information Attribute, which describes
one or relates multiple parts of the product. Examples
for attributes are that a product is painted or that mul-
tiple parts are plugged or glued together.
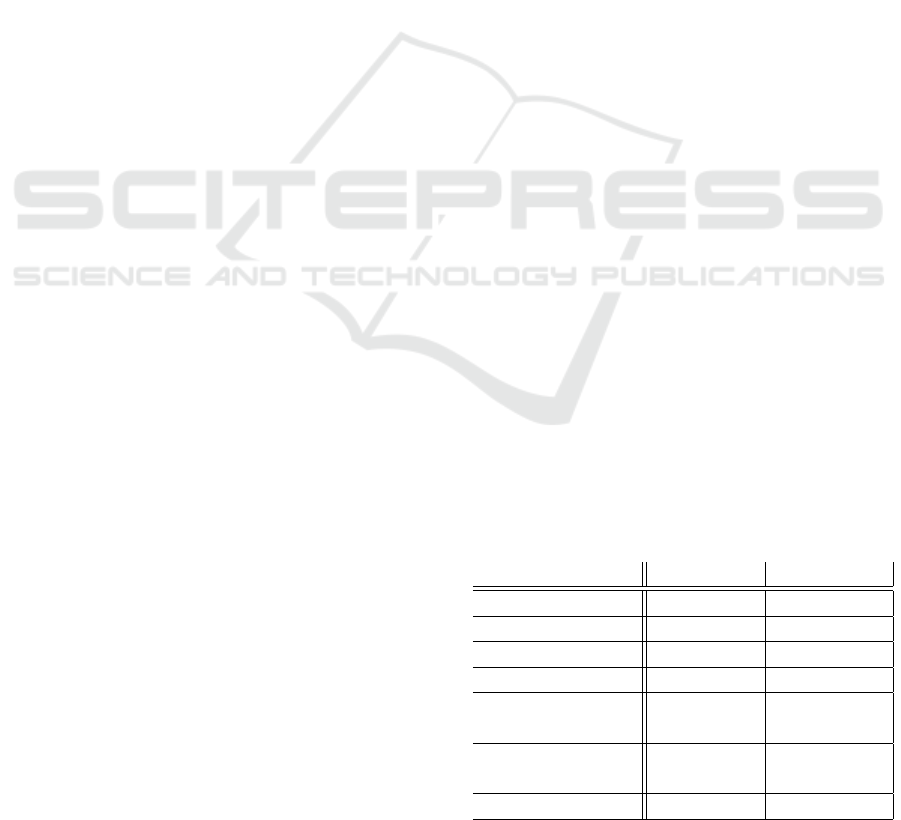
Figure 3: LEGO diamond structure with four attributes.
Fig. 3 shows a simple structure which is an expres-
sive showcase for general planning challenges. Four
2 × 2 bricks are assembled in a diamond-like shape.
The four connection lines illustrate attributes describ-
ing which bricks are in a stacked relationship to each
other and which transformation between the respec-
tive bricks is applied.
Attributes are called executionally equivalent if
they cannot be established independently. Assuming
all three lower bricks in Fig. 3 are already stacked by
attributes 3 and 4. A following placing of the top brick
would result in simultaneously establishing attribute 1
and 2. An independent establishment of only one of
these attributes is not possible. The property of execu-
tional equivalence is not valid in general on a specific
set of attributes but depends on the particular setting:
When attributes 2 and 3 are already established, the
set of attributes 1 and 4 emerges to be executionally
equivalent. However, with attributes 1 and 3 being
established, attributes 2 and 4 are not executionally
equivalent due to their contradicting stacking direc-
tion relating to their joint (blue) brick.
To automatically derive attributes from an ini-
tial construction plan, we propose Analyzer Mod-
ules which take a construction plan and return a set
of attributes. They automatically compute attributes
from existing properties or relationships, for exam-
ple through geometrical inspection. Multiple analyzer
modules can be provided for general purposes and
different domains. For instance, one analyzer mod-
ule determines parts which need to be bolted together
while another one identifies glued parts and calculates
minimal needed adhesive strength using an internal
static analysis. Once analyzer modules are available
for all properties and relationships of certain domain,
they result a complete set of attributes when applied
to a construction plan of the respective domain.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
578

A data structure describing which attributes are es-
tablished and which are not at a certain moment is
called Situation. When manufacturing a product, at
least two situations are known: a goal situation con-
taining all established attributes to form the final prod-
uct, and an initial situation which describes the setup
before assembly begins. Here, a set of attributes de-
scribes initial placements of parts, for example.
Analyzer modules as well as types of attributes are
generally contributed by application domain experts
who know about technical details, what kinds of at-
tribute types exist and how they can be identified in a
plain construction plan. The result of structure anal-
ysis is an initial situation describing start setup and a
goal situation which analyzer modules extracted out
of a construction plan.
4.2 Process Planning
To transition an initial situation to a goal situation, de-
tailed process descriptions (Process Actions), which
represent abstract robot behavior, and their order are
searched for. They furthermore indicate which at-
tributes are established or removed when executing
the behavior. For this, Skill Modules are introduced
which create particular process actions that are appli-
cable in a given situation. Depending on a concrete
skill module implementation multiple alternative pro-
cess actions are conceivable for one situation: If a
situation describes three bricks placed on the floor, a
grasping skill module provides three grasping actions
– one for each brick. At this point, alternative pro-
cess steps are introduced which later allow for overall
variability exploration and optimization.
Skill modules and their respective process actions
are contributed by process experts who have funda-
mental knowledge about process steps which can be
taken in specific situations. As a result of process
planning, skill modules provide possible process ac-
tions which can be performed in specific situations.
4.3 Task Assignment
Process actions describe behavior from the product’s
point of view. From automation view, process actions
need to be performed by concrete manipulators like
robots, grippers or tools. For defining the behavior
of process actions, skill modules use generic behav-
ior interfaces. These can later be instantiated by con-
crete manipulators whose capabilities are then used
to perform the desired action. This concept is taken
from the Robotics API where actuator and sensor in-
terfaces are used to abstract robot actions (e.g. PTP,
LIN, GRASP, MEASURE) from the underlying ma-
nipulators. With concrete manipulators assigned, a
skill module can calculate a new situation that results
when executing the process action in a given situa-
tion. When a product is being grasped, the gripper is
also part of the resulting situation.
The basic purpose of task assignment is to find
proper constellations of manipulators which can be
used to perform a process action’s task based on its
behavior descriptions. In a flexible multi-functional
robot cell like the one described by Angerer et al.
(2015), multiple robots – or even teams of robots –
might be applicable to perform the same task. This
search is done by Manipulator Modules which find
all manipulators or teams appropriate for the behavior
interfaces of the process action. In the current stage,
alternatives of manipulators are provided, but there is
no concrete strategy or criteria for selection yet.
Process actions describe their task without know-
ing the actuator effectively used. This allows to inject
concrete robots and to evaluate the appropriateness
while planning. Manipulator modules are contributed
by process and automation experts. The step of task
assignment deals with resource (manipulator) alloca-
tion and assignment as well as with finally providing
concrete execution plans.
4.4 Simulation and Execution
Once specific manipulators are assigned to a process
action, it can be executed in a given situation. The
presented approach uses Robotics API activities (An-
gerer et al., 2013) to execute process actions with
robots. The framework allows for both inbuilt simula-
tion enhanced with a graphical 3D visualization (see
Fig. 1) as well as execution with real robots on its
Robot Control Core (Vistein et al., 2014). For product
parts being correctly positioned and visualized, the
changes performed by process actions are transferred
to the world model of the Robotics API by translat-
ing attributes to geometrical or logical properties sup-
ported by the framework.
The concepts presented in this work are evaluated
in simulation only. However, the Robotics API al-
lows for a transition to real execution. For this, the
exact positions of resources, robots and parts need to
be reflected back into the world model. In general,
processes furthermore need testing and adjustments
of process parameters by automation experts.
5 HEURISTIC SEARCH
For defining an overall execution plan, several steps
have to be taken using the aspects described in the
Automatic Planning of Manufacturing Processes using Spatial Construction Plan Analysis and Extensible Heuristic Search
579

Analyzer
Module
Construction
Plan
Current Situation
Skill Action
Goal Situation
Initial Situation
Skill Action
Process
Action
Current Situation
Situation
Skill
Module
Manipulator
Module
Figure 4: Overview of steps for planning, modules and intermediate artifacts.
previous sections, each offering a variety of options
to continue with. Figure 4 gives an overview of the
steps, modules and artifacts involved when searching
for an overall process plan. In detail, following algo-
rithmic steps have to be taken:
1. Find the goal situation by applying all analyzer
modules to the construction plan. Provide initial
situation from a description of the initial setup.
Choose initial situation as current situation.
2. Apply all skill modules to current situation and
derive all possible process actions.
3. For each process action: Use manipulator mod-
ules to find all possible sets of manipulator in-
stances which satisfy the process action’s needed
behavior interfaces.
4. For each set of manipulator instances: Assign it
to the process action and derive its resulting situ-
ation. Iteratively repeat (2) through (4) with the
new situation as current situation until goal situa-
tion is reached.
5. Execute each step of the found path using the cor-
responding manipulators and respectively update
the world model after performing process actions.
As hinted by steps (2) and (3), an exponential
number of options evolves due to alternative pro-
cess actions for each situation and different manip-
ulators for each single process action. To find an
optimal process plan, we formulate an optimization
problem for the A-Star algorithm (Hart et al., 1968).
A-Star uses sets of nodes, weighted directed edges
and cost-estimations for nodes to iteratively search
for a cost-minimal path from an initial to a desired
goal node. In the presented approach, situations act
as nodes, with initial and goal situation as initial and
goal nodes. Starting with initial situation, A-Star re-
quests all edges to proceed with. For this, all possible
process actions basing on initial situation are calcu-
lated. Each process action is combined with all possi-
ble manipulator sets which are applicable for execu-
tion. Such a combination of process action and ma-
nipulators is used as edge in A-Star. Based on their
weights, edges are taken by A-Star and a subsequent
situation is computed to continue with. The weight
of an edge can be determined as the expense of the
process action and the cost of manipulators used, for
example, whereas expected remaining cost of a situa-
tion to reach goal situation needs to be estimated.
Cost estimation plays a fundamental role for A-
Star. The performance is highly dependent on the cal-
culated weights of transitions and the expected dis-
tances from nodes to the goal, which might be esti-
mated exactly in rarest cases only. If overestimated,
the result is not guaranteed to be cost-optimal. If un-
derestimated, a cost-optimal solution is guaranteed
but the search may take exhaustive time. Our ap-
proach estimates costs for situations based on their
attributes: The cost of a situation is the number of
attributes which still have to be established plus the
number of attributes which need to be removed in or-
der to reach goal situation. The actual weight of a pro-
cess action transitioning from a situation to another
is calculated as difference between the costs of both
situations, but with a minimum of 1. This prevents
weight-neutral process actions with no effect from be-
ing performed and leads to a cost-underestimation of
situations which guarantees cost-optimal solutions.
6 APPLICATION TO LEGO
The planning approach is applied to the domain of
LEGO and as a use case, a house as shown in Fig. 2 is
built automatically using the presented concepts. In
this domain, three kinds of attributes suffice to de-
scribe situations for the approach:
• A base plate is statically placed in the world by a
FixpointAttribute which describes its position.
• LegoPlacementAttributes between two bricks de-
scribe that these are plugged together with a spe-
cific relative transformation.
• A GraspAttriute denotes a brick which is grasped
by the gripper, as well as its grasping position.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
580
While the spatial positions of bricks are already
given for both initial and goal setup (see Fig. 2), ini-
tial and goal situations with attributes need to be com-
puted using analyzer modules. Being LEGO domain
experts, the authors created a LegoBrickAnalyzer-
Module which geometrically checks each pair of
bricks for being in a plugged relationship. For each
pair with an adequate spatial distance and rotation, a
LegoPlacementAttribute is generated. In the diamond
example, this analyzer module identifies the four at-
tributes depicted in Fig. 3.
To determine possible manipulation steps, skill
modules along with manipulator instances are used.
For LEGO and a robot cell consisting of a robot and
a gripper, two kinds of skill modules are relevant:
• PickupSkillModule provides process actions for
grasping and picking up each brick which is free-
standing in a given situation. After execution
of this process action, existing LegoPlacement-
Attributes of the brick are removed and a Grasp-
Attribute between brick and gripper is established
in the resulting situation.
• PlaceSkillModule provides process actions for
placing an already grasped brick on the target
position derived from the goal situation. The
resulting situation contains new LegoPlacement-
Attributes and is relieved from the GraspAttribute.
As a design-decision to this example, the gripper
can only grasp one brick at once instead of clusters of
bricks. In a first guess, a simple heuristic might build
a LEGO structure strictly processing layer by layer
from bottom to top starting at the base plate. This
straightforward approach is capable in most cases, but
due to specific intermediate structure setups, dead-
lock situations might occur: Assuming a final prod-
uct with overhanging parts, these bricks will never
be plugged from the downside. As another exam-
ple, bricks needed for the first layer can be blocked
by other bricks which will however not be removed.
To overcome such deadlock situations, a more
complex heuristic is proposed for which all possi-
ble immediate steps are reviewed and rejected where
necessary. Both PickupSkillModule and PlaceSkill-
Module precisely check geometrical and structural
suitability for picking up or placing a brick. In par-
ticular, all attributes modified in one step are checked
for required executional equivalence, and collisions
are identified and excluded, e.g. when grasping a
closely surrounded brick with hence no valid grasp-
ing point. Furthermore, a situation is rejected if it
will eventually lead to a deadlock situation. As-
suming the diamond example in Fig. 3 with first at-
tribute 3 and then attribute 1 established. The re-
sulting “C”-like construction excludes the blue brick
from ever being inserted since its two attributes 2
and 4 are not executionally equivalent. To identify
such eventual deadlocks in the situation where they
become inevitable, for example when establishing at-
tribute 1, look-aheads are performed which translate
bricks and attributes into graphs and analyze future
attributes between sub-graphs for executional equiv-
alence in a depth-first search. Such early deadlock
predictions are expensive but cut down on the state
space significantly. As a further improvement, only
established attributes that are transitively connected
to a FixpointAttribute in both, current and goal situ-
ation, contribute to the cost estimation of a situation.
This adjustment privileges bottom-up assembly (like
the simple first guess does) but does not exclude other
strategies. Thus, deadlock situations induced by the
bottom-up strategy are avoided while speeding up the
planning algorithm for building LEGO products.
7 EXPERIMENTAL RESULTS
For both LEGO structures, diamond and house, pro-
cesses have been planned with the presented approach
and with modules as described in the previous sec-
tion. All experiments have been run on a Win-
dows machine with an Intel(R) Core(TM) i7-7600U
(2.80GHz) and 24 GB RAM. The heuristic search and
all modules have been executed by a Java Virtual Ma-
chine within a single-threaded context. Table 1 gives
a summary of all measured values. For the diamond
example, 10,000 experiments have been performed –
all resulting with 8 process steps. The shortest ex-
periment investigated 12 states in A-Star to find a re-
sult, on average 15.91 states are explored. To plan the
house, the calculation time of one state increases by
a factor of almost 14 compared to the diamond. The
reason is the higher amount of bricks which leads to
longer analysis time to find possible next steps and
time needed for collision checks. The house exam-
Table 1: Results of experiment runs for diamond and house.
Diamond House
Bricks 4 26
Base Plate 1 1
Test Runs 10,000 100
Result Steps 8 52
Avg. Time 0.88 ms 280.81 ms
(Std. Deviation) (± 0.79 ms) (± 74.06 ms)
Investigated States 15.91 368.21
(Min - Max) (12 - 18) (182 - 738)
Time per State 0.055 ms 0.763 ms
Automatic Planning of Manufacturing Processes using Spatial Construction Plan Analysis and Extensible Heuristic Search
581

Table 2: Tests with different enabled aspects of the heuristic: For each kind of experiment, test runs, average and standard
deviation time, average investigated states with min and max and average time per state is measured.
SingleGrasp MultiGrasp MultiRobot No-Deadl.-
w/ BottomUp w/o BottomUp w/ BottomUp w/o BottomUp Prediction
Experiment Nr. #1 #2 #3 #4 #5 #6
Test Runs 100 100 100 100 100 1
Avg. Time 0.281 s 368.477 s 0.389 s 1.005 s 9.112 s > 1,800.0 s
(Std. Deviation) (± 0.074 s) (± 214.223 s) (± 0.137 s) (± 0.432 s) (± 5.598 s) -
Investigated States 368.21 519,948.70 418.77 956.55 1,427.42 > 1.1M
(Min - Max) (182 - 738) (8.58k - 1.06M) (208 - 752) (294 - 2,598) (556 - 3,173) -
Time per State 0.763 ms 0.709 ms 0.930 ms 1.051 ms 6.384 ms *
ple has furthermore been used to evaluate different
aspects of the heuristic with 100 test runs each. Ta-
ble 2 compares six different experiments each with
different sets of activated features. All terminating
experiments returned a sequence of 52 process steps:
Picking up 26 bricks and placing 26 bricks.
Two experiments have been performed with
SingleGrasp which allows grasping of only one brick
at once. The first one uses the heuristic as described in
the previous section preferring bottom-up assembly.
After 0.281 seconds with a standard deviation time of
74 milliseconds a valid process plan was found.
With bottom-up preference being disabled, exper-
iment #2 exhibits an exploded set of states, leading
to an overall longer time to find a valid result. In
the house example, parts of the house which belong
to the upper part might already be assembled on the
base plate but can not be grasped in a later step. As an
interesting fact, the average time per state decreases
slightly. This is because there is no computation
whether a randomly picked brick fits into the bottom-
up strategy.
Two further experiments have been performed
with MultiGrasp which allows for picking up and
placing whole structures of LEGO instead of just sin-
gle bricks. Parts of the product (the roof of the house,
for example) can be assembled at another location –
even before underlying parts are finished. Also here,
both variants are tested, starting with bottom-up pref-
erence being enabled in experiment #3. All measured
values seem similar to these of experiment #1. Due
to preferred bottom-up strategy, partial assembly of
parts does not occur in practice.
As a combination of disabled bottom-up and en-
abled grasping of multiple bricks, experiment #4
clearly shows that the large state space of a free (non
bottom-up) strategy – where the order of steps is ran-
domly chosen – can be compensated by the grasping
of structures. The grasping of whole brick structures
allows for assembly of different product parts inde-
pendently and combining them afterwards.
Experiment #5 uses two robots and grippers, all
other variants left to default (#1). The introduction
of an alternative manipulator causes a significant in-
crease in time needed to find a result. This is mainly
caused by the huge number of states to be investi-
gated, owing to the fact that both robots can grasp
each LEGO brick – in parallel and in all combina-
tions. A further conspicuousness is stated by the over-
proportional standard deviation time of this experi-
ment, which can be explained by the variety of alter-
natives and the diversity of investigated states. Some
test runs seem to find a valid trace in a very early try
while others keep searching with stagnating guesses.
When early deadlock prediction is deactivated
(see section 6), many states and paths are explored
although an eventual deadlock may be certain. Exper-
iment #6 (No-Deadl.-Prediction) is aimed to show the
effects of this deactivation, but owing to the huge in-
crease of state space no test run did terminate within
the first half an hour. Instead, they finally ended up
with memory exhaustion at about 1.1 million states.
After about 20 minutes, each test run caused the Java
garbage collector to continuously occupy CPU while
significantly slowing down the overall test execution.
Owing to this influence, no valid measurement for
time per state can be made.
Besides an immense number of investigated states
in the last experiment, a low average time per state is
expected due to the deactivation of the prediction al-
gorithm. Situations are not expensively investigated
in detail to discover whether a deadlock will be un-
avoidable. As a scientific finding, even exhaustive
algorithms which essentially increase time per state
can be profitable and drastically reduce overall plan-
ning time as long as they reduce the state space sig-
nificantly. A comparison of experiment #2 (bottom-
up disabled) and experiment #1 (single-grasp and
bottom-up) confirms this observation by the increased
time per state but drastically reduced overall time.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
582

8 CONCLUSIONS AND
OUTLOOK
In this paper we introduced an approach for automatic
planning of manufacturing processes to build prod-
ucts with robots. It bases on modules which aim for
integrating expert knowledge and at the same time
separate different domain expertises such as automa-
tion, process and application into independent com-
ponents. The approach contains a heuristic search
based on cost estimations to find a suitable manu-
facturing program. Here, the modules contribute to
different steps in order to solve the overall problem:
They allow for deriving a structural model from an
engineer’s construction plan of a goal product and are
used to calculate processes to establish the structure.
Furthermore, modules can plan concrete robot actions
to perform the overall manufacturing of the final prod-
uct. We applied the presented concept to the domain
of LEGO and used it to plan the manufacturing of a
LEGO house with a robot. It has been evaluated with
different variations of heuristic properties.
As further work, we plan to improve the perfor-
mance of the heuristic search, for example by re-
ducing the state space through geometric reachability
analysis between manipulator and object. Especially
when planning with multiple manipulators, a strategy
for the selection of alternative manipulators for each
process action might be included into the approach.
As a major future research question, we will inves-
tigate strategies for parallel execution of tasks using
independent manipulators. The goal is to make plan-
ning for multiple robots in a multi-functional robot
cell feasible without the rapidly growing planning
time seen in the multi-robot evaluation results of our
work. In a further step, a second use case in a differ-
ent domain – such as CFRP – will be investigated to
demonstrate that the presented concepts can be gener-
ically applied to other domains and in real world.
ACKNOWLEDGEMENTS
This work is partly funded by the German Research
Foundation (DFG) under the TeamBotS grant.
REFERENCES
Angerer, A., Hoffmann, A., Schierl, A., Vistein, M., and
Reif, W. (2013). Robotics API: Object-oriented soft-
ware development for industrial robots. J. of Software
Engineering for Robotics, 4(1):1–22.
Angerer, A., Vistein, M., Hoffmann, A., Reif, W., Krebs, F.,
and Sch
¨
onheits, M. (2015). Towards multi-functional
robot-based automation systems. In Proc. 12th Intl.
Conf. on Inform. in Control, Autom. & Robot., pages
438–443.
Fikes, R. and Nilsson, N. J. (1971). STRIPS: A new ap-
proach to the application of theorem proving to prob-
lem solving. Artif. Intell., 2(3/4):189–208.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE Transactions on Systems Science and
Cybernetics, 4(2):100–107.
Kaelbling, L. P. and Lozano-P
´
erez, T. (2011). Hierarchical
task and motion planning in the now. In Proc. IEEE
Intl. Conf. on Robot. & Autom., pages 1470–1477.
Knepper, R. A., Layton, T., Romanishin, J., and Rus, D.
(2013). Ikeabot: An autonomous multi-robot coordi-
nated furniture assembly system. In Proc. IEEE Intl.
Conf. on Robot. & Autom., pages 855–862.
Levihn, M., Kaelbling, L. P., Lozano-P
´
erez, T., and Stilman,
M. (2013). Foresight and reconsideration in hierarchi-
cal planning and execution. In Proc. IEEE/RSJ Intl.
Conf. on Intell. Robots and Systems, pages 224–231.
Macho, M., N
¨
agele, L., Hoffmann, A., Angerer, A., and
Reif, W. (2016). A flexible architecture for automat-
ically generating robot applications based on expert
knowledge. In Proc. 47
th
Intl. Symp. on Robotics.
VDE Verlag.
McDermott, D., Ghallab, M., Howe, A., Knoblock, C.,
Ram, A., Veloso, M., Weld, D., and Wilkins, D.
(1998). PDDL — the planning domain definition lan-
guage. Technical Report TR 98 003/DCS TR 1165,
Yale Center for Computational Vision and Control.
N
¨
agele, L., Macho, M., Angerer, A., Hoffmann, A., Vis-
tein, M., Sch
¨
onheits, M., and Reif, W. (2015). A
backward-oriented approach for offline programming
of complex manufacturing tasks. In Proc. 6
th
Intl.
Conf. on Autom., Robotics & Applications, pages 124–
130. IEEE.
Pfrommer, J., Stogl, D., Aleksandrov, K., Navarro, S. E.,
Hein, B., and Beyerer, J. (2015). Plug & produce
by modelling skills and service-oriented orchestration
of reconfigurable manufacturing systems. Automa-
tisierungstechnik, 63(10):790–800.
Vistein, M., Angerer, A., Hoffmann, A., Schierl, A., and
Reif, W. (2014). Flexible and continuous execution of
real-time critical robotic tasks. Intl. J. of Mechatronics
and Automation, 4(1):27–38.
Automatic Planning of Manufacturing Processes using Spatial Construction Plan Analysis and Extensible Heuristic Search
583
