
Embedded Agent based on Cyber Physical Systems: Architecture,
Hardware Definition and Application in Industry 4.0 Context
Mario Ricardo Nascimento Marques Junior, Braian Konzgen Maciel,
Gabriel M. Balota, Renan T. Fonseca, Manuel Simosa, Henrique S. Conceic¸
˜
ao,
Eder Mateus Nunes Gonc¸alves and Silvia Silva da Costa Botelho
Center of Computational Sciences, Federal University of Rio Grande, Rio Grande, Brazil
Keywords:
Industry 4.0, Intelligent Agent, Cyber Physical Systems, Single Board Computer.
Abstract:
Industry 4.0 is promoting a new Industrial Revolution through the application of computer and communication
technologies for the construction of Cyber Physical Systems (CPS), which can be considered a key component
for the development of this new revolution. In this context, this article proposes to implement an architecture
for embedded intelligent agents based on CPS. For this, it is proposed a classification of hardware suitable
for boarding this agent. Through this classification a device and initial testing of the agent is selected using
the MTConnect standard, which currently presents itself as a potentially efficient standard for this application
given the guarantees of some communication requirements. The initial tests presented satisfactory results in
the system against the requirements of communication, processing and storage. In addition, the benefits of
the proposed architecture over traditional automation systems are presented. Finally, the possible scenario for
validation of this architecture is presented.
1 INTRODUCTION
The evolution of the industrial environment is fun-
damental for the supply of human demands. And
as new needs and challenges arise, technological in-
novations need to emerge to meet those demands.
Throughout history, the industrial scenario underwent
three major transformations: the 1st Industrial Re-
volution was characterized by the mechanization of
production, with the invention of the steam engine.
The introduction of electricity and creation of assem-
bly lines, characterized the 2nd Industrial Revolution.
The 3rd Industrial Revolution emerged in the 1970s,
when the electronics and information technology in-
dustries were still developing the automation of pro-
duction processes (Drath and Horch, 2014).
According to (Kagermann et al., 2013), the intro-
duction of the German program called Industrie 4.0
has given rise to the challenge that is presented as the
4th Industrial Revolution, in which intelligent machi-
nes and components can communicate autonomously.
Thus, decisions on the shop floor can be made by the
machines themselves, from information provided in
real time. Another important feature, which can be
highlighted from Industry 4.0, is the integration of
various technologies related to the system, focusing
on its cybernetic representation. Cybernetic represen-
tation can be seen as a digital representation of the
real entity, so it is also called Digital Twin (Lee et al.,
2015).
Within this new world that is being idealized,
some concepts gain great prominence and direct in-
fluence for the development of the 4th Industrial Re-
volution. Cyber Physical Systems(CPS) (Jazdi, 2014)
and Internet of Things (IoT) (Shrouf et al., 2014) are
some of the concepts that have contributed to the alre-
ady known and emerging technologies applied to in-
dustrial manufacturing.
For (Zhou et al., 2015), Industry 4.0 is a vision for
the future, as it currently faces many difficulties and
challenges, including scientific challenges, techno-
logical challenges, economic challenges, social pro-
blems and political issues. Examples of scientific and
technological challenges include the development of
intelligent devices, building the network environment,
large data analysis and processing, and digital manu-
facturing.
The ability to communicate and transfer data bet-
ween different devices (sensors and actuators) within
an industrial environment emerges as one of the pro-
584
Junior, M., Maciel, B., Balota, G., Fonseca, R., Simosa, M., Conceição, H., Gonçalves, E. and Botelho, S.
Embedded Agent based on Cyber Physical Systems: Architecture, Hardware Definition and Application in Industry 4.0 Context.
DOI: 10.5220/0006863505840591
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 584-591
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

blems to be solved for the new industry infrastructure.
Several standards have emerged to ensure that equip-
ment from different sources can collect and transmit
data in a safe and efficient way.
Another point that has a great prominence in this
scenario is the decentralization of control and incre-
ment of complexity for the accomplishment of all the
operations. Thus the need to develop the autonomous
behavior of the system through approaches such as
multi-agent systems.
In this context, the present article proposes a clas-
sification of Single Board Computers (SBC) for in-
dustrial applications based on an intelligent agent ba-
sed CPS architecture. Once the CPS architecture,
based on 5C (Lee et al., 2015), was developed, it
was necessary to define constraints for supported har-
dware to deploy it. The CPS architecture aims to meet
most of the principles of Industry 4.0 using establis-
hed technologies. The SBC classification indicates
which levels of the CPS architecture on each device
type are able to run on it.
2 OVERVIEW OF CONCEPTS
AND TECHNOLOGIES FOR
INDUSTRY 4.0
This section presents some concepts of techniques as
well as technologies that are gaining prominence with
the development of the next industrial revolution.
2.1 Industry 4.0 Principles
Industry 4.0 is based on six basic principles (Hermann
et al., 2016):
• Real-time operation capability: consists of in-
stant acquisition and processing of data, allowing
decision-making within the constraints time of the
environment;
• Virtualization: proposes the existence of a virtual
copy of the intelligent factories, allowing the re-
mote traceability and monitoring of all the proces-
ses through the numerous sensors spread throug-
hout the plant;
• Decentralization: decision-making can be done
by the cyberphysical system according to the
needs of real-time production. In addition, ma-
chines will not only receive commands, but will
be able to provide information about their work
cycle;
• Service Orientation: Use of service-oriented soft-
ware architectures coupled with the Internet of
Services concept.
• Modularity: Production according to the demand,
coupling and uncoupling of modules in the pro-
duction, offering flexibility to change the tasks of
the machines easily.
• Interoperability: The ability of machines, devices,
sensors and humans to connect and communicate
through the Internet of Things and the Internet.
2.2 Cyber Physical Systems
According to (Lee et al., 2015) the CPS is a system
composed of the union of physical subsystems in net-
work with the computation. The CPS is responsible
for connecting the virtual world with physical rea-
lity, which integrates computing, communication and
storage capacities, and can operate in real time in a
reliable, secure, stable and efficient way.
According to (Barbosa et al., 2016) CPS is an es-
sential aspect for the consummation of the 4th Indus-
trial Revolution, ie, is the key point for the current
industry transformation in Industry 4.0. Cyber Phy-
sical Systems aim to monitor and control industrial
processes through a network of intelligent devices and
sensors, using virtual models of processes that corre-
spond to real processes models, through the combi-
nation of computational, communication and control
elements (Kim and Kumar, 2012). With this it is pos-
sible to decentralize the decision making, that is, an
intelligent device has the power to self-contro
The constitution of CPS may involve the use of
various technologies, such as Multi Agent Systems
(MAS), Service-Oriented Architecture (SoA), Cloud
Computing, Big Data, Machine-to-Machine (M2M)
and Visual Computing.
The integration between different technologies
aims to contribute to the CPS facing challenges iden-
tified in the principles of Industry 4.0. Multi Agent
Systems, for example, can contribute on flexibility,
robustness, adaptation, configuration and distributed
control of these systems.
In the context of Industry 4.0, intelligent agents
and Multi Agent Systems share common ground with
CPS. They can enable CPS with a myriad of capa-
bilities to achieve complexity management, decentra-
lization, intelligence, modularity, flexibility, robust-
ness, and real-time responsiveness capabilities (Lei-
tao et al., 2016).
2.3 5C Architecture for CPS
Among the CPS architectures, the architecture deno-
minated 5C proposed by (Lee et al., 2015) has great
prominence in the literature. It serves as a guide for
Embedded Agent based on Cyber Physical Systems: Architecture, Hardware Definition and Application in Industry 4.0 Context
585
developing and implementing CPS for industrial ap-
plications. This architecture is divided into five levels
as seen in Figure 1:
(i) Smart Connection: this level is responsible to
acquire accurate and reliable data from sensors,
controllers and even ERP systems, with seamless
and tether-free guaranties;
(ii) Data-to-information Conversion: this level is
responsible for generating meaningful informa-
tion from different data sources, which can be
achieved using algorithms for prognostics and he-
alth management.
(iii) Cyber: Considering that this level must to gather
massive information, it must use specific analytics
to extract additional information about the status
of individual components and machines;
(iv) Cognitive: This level must generate e provide
knowledge of the monitored systems for other
components and operators;
(v) Configuration: This level acts as a supervisory
control since it can attribute self-capabilities for
the system generating corrective and preventive
decisions.
Figure 1: 5C Architecture for Developing a CPS for Indu-
stry 4.0 (Lee et al., 2015).
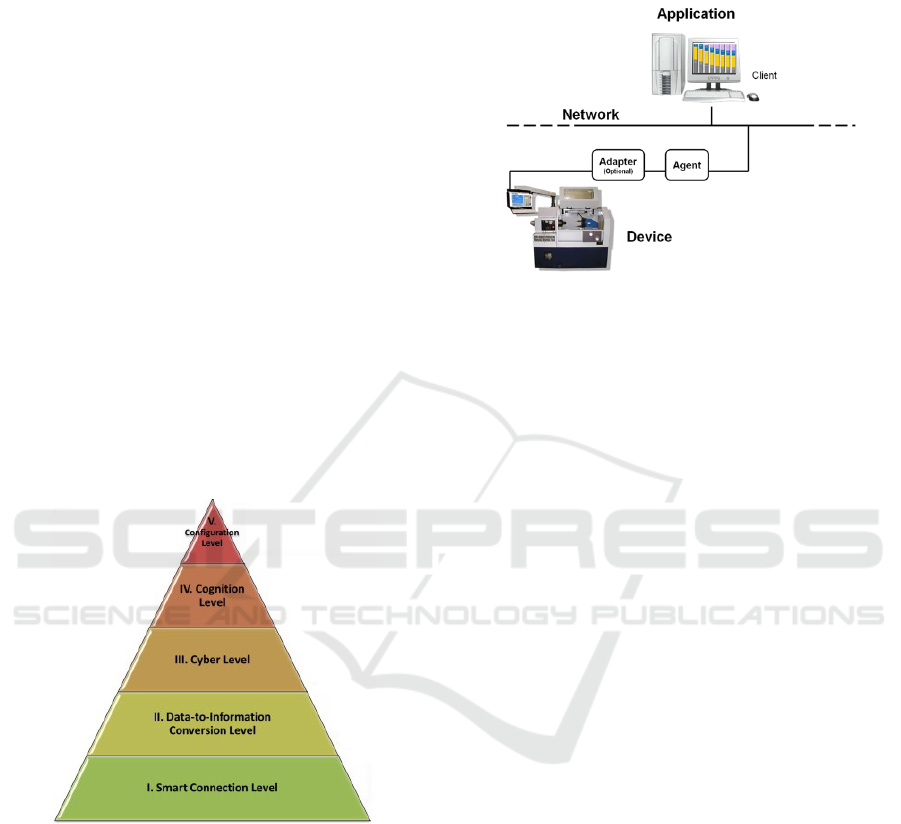
2.4 MTConnect
The ability to connect between different devices ap-
pears as one of the main challenges of Industry 4.0.
Several standards and protocols have been developed
in recent years, and the MTConnect Institute has de-
veloped a solution to this problem.
The MTConnect standard is based on standard In-
ternet technologies such as HTTP (Hyper Text Trans-
fer Protocol) and XML (Extensible Markup Lan-
guage). A system that implements the MTConnect
protocol has five fundamental components: Device,
Adapter, Agent, Network and Application/Client, ar-
ranged according to Figure 2. The most important
components are Agent and Adapter.
Figure 2: Basic architecture of device connected using MT-
Connect standard (MTConnect, 2008).
In the context of Industry 4.0 MTConnect emerges
as a solver for connection between physical devices of
a CPS, acting at the lowest level ensuring the acquisi-
tion of data independent of the format or protocol of
communication.
3 PROPOSED ARCHITECTURE
This section aims to propose an architecture for the
development of intelligent embedded agents based on
Cyber Physical Systems. The CPS 5C architecture
proposed by (Lee et al., 2015) is taken by reference.
The intelligent agent design is based on the charac-
teristics of this architecture and the theory of Multi
Agent Systems, in order to enable the construction of
intelligent environments compatible with CPS.
The embedded intelligent agent must be able
to perceive and interact with the physical medium
through sensors and actuators, as well as interact with
virtual agents through the network. It can also pre-
sent control elements, through algorithms such as PID
(Proportional-Integral-Derivative Controller) and Ar-
tificial Intelligence, promoting distributed control and
decentralization.
3.1 Agent Software Architecture
The proposed software architecture for agent develop-
ment is organized into five modules: configuration,
intelligence, cybernetic, conversion and communica-
tion.
Figure 3 presents the layout as well as the techno-
logies and functionalities of the agent software archi-
tecture modules.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
586
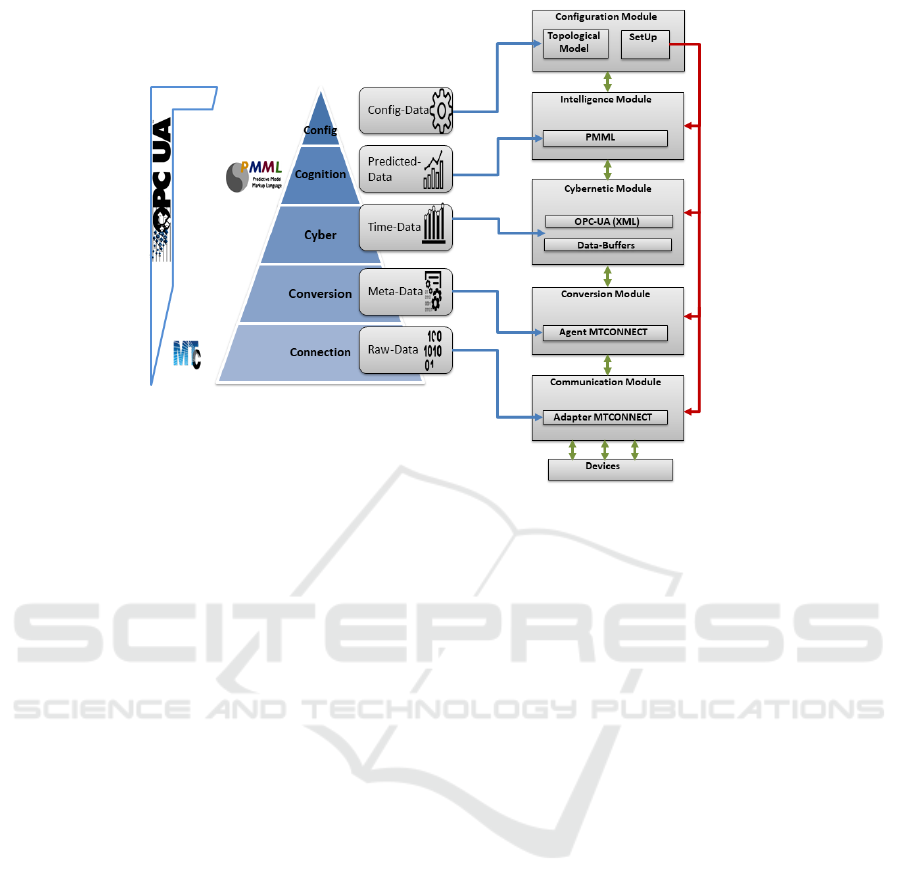
Figure 3: Software architecture in 5 modules.
• Configuration Module: responsible for the confi-
guration interfaces of all the modules. In it are de-
fined interfaces to access and define the properties
of the topological model, properties of communi-
cation, control, intelligence and storage. The to-
pological model is a hierarchical structure replete
with information of the devices, components and
systems that make up the agent-managed physi-
cal structure, when this is the case. This module
requires a complete modeling of all components
connected or managed by the agent.
• Intelligence Module: responsible for the mapping
and tracking of patterns, behaviors and data qua-
lity control. It uses advanced algorithms to point
out faults and promotes the predictive and cog-
nitive behavior of the system. From this module
emerge basic functions of manufacturing systems,
such as control, monitoring, planning and schedu-
ling.
• Cybernetic Module: responsible for the manage-
ment of system information in order to represent
them on a temporal scale through inferences and
predictions. It consists of a buffer, which regis-
ters the agent data and a data adapter for external
databases that enables data acquisition.
• Conversion Module: responsible for the conver-
sion of data collected in the communication mo-
dule into information for the system, assigning se-
mantics and some type of treatment to guarantee
the continuous provision of this information.
• Communication Module: responsible for adap-
ting the different protocols of industrial networks
to the standard adopted in the system and to ena-
ble interoperability through this standard. The
module also provides the model with the topolo-
gical description of the equipment for the other
agents through the network.
The architecture described above imposes greater
restrictions on communication and information ma-
nipulation for the first three layers, communication,
conversion and cybernetics, and greater processing re-
strictions for the upper layers, intelligence and confi-
guration. From these requirements it was necessary to
establish a classification for SBC able to board this ar-
chitecture. This classification is presented in the next
section.
4 HARDWARE CLASSIFICATION
With the technological advancement of the advance-
ment in the past few years, the Single Board Compu-
ters (SBC) had an increase of the capacity of proces-
sing and memory, reduction of cost and consequently
its popularization. Faced with this, several projects
have emerged that use this type of hardware for in-
dustrial applications.
An SBC is a computer shipped in a reduced form
and ready for use. It can be considered as a generic
solution in hardware and software that can be used
in the development of embedded systems. It provi-
Embedded Agent based on Cyber Physical Systems: Architecture, Hardware Definition and Application in Industry 4.0 Context
587

des a complete platform for the development of end
products for various applications such as medical, in-
dustrial automation, aerospace and robotics.
Thus, this section will be presented recent projects
that use the Raspberry Pi platform in industrial appli-
cations. A classification of hardware devices will also
be performed for the development and implementa-
tion of the CPS Agent modules.
4.1 Industrial Solutions using
Raspberry Pi
An industrial computer based on Raspberry Pi meet-
ing the IEC 61131-2 standard is shown in (Revoluti-
onPi, 2017). This standard establishes hardware stan-
dards for any product in which the primary purpose
is the function of industrial control equipment, inclu-
ding PLC (Programmable Logic Controller) or its as-
sociated peripherals for the purpose of control and
command of machines. Depending on customer re-
quirements, this device may be supplemented by di-
gital or analog I/O modules as well as by appropriate
fieldbus gateways to connect it to an industrial net-
work. The base modules and expansion modules are
shipped with 24 Volts which is the standard used in
the industry.
The Strato Pi (SferaLabs, 2017) base empowers
the Raspberry Pi Model B version 2 and 3 models
with various hardware features to make it suitable for
use in professional applications where reliability and
continuity of service are essential requirements.
Modberry (ModBerry, 2017) is a universal con-
troller built with the needs of the automated, teleme-
tric and integrated systems markets in mind. It has
several communication interfaces such as digital or
analog I/O modules, GPS, Modbus and Wi-Fi.
NetPI (netIOT, 2017) is a Raspberry Pi 3
architecture-based platform for implementing custom
industrial automation projects with Cloud, Internet of
Things and Industry 4.0 features.
4.2 Hardware Classification for CPS
Agent
According to (Newark, 2014), SBC today are ba-
sically divided into two categories: proprietary and
open source. Proprietary is one who is usually de-
signed for use in final application or as a reference
for evaluation. They are industrial projects that go
through the same tests that a final product requires.
Open source SBCs give users access to the design and
layout of hardware and the source code used on the
board. This is ideal for all users because they can ea-
sily understand how software and hardware operate
and adopt design to meet project requirements.
Considering the most popular open source SBC,
a classification was created, analyzing characteristics
such as: Processing capacity, available memory, I/O
devices and connectivity. The classes in turn were de-
fined using only the processing capacity and available
memory information of each hardware, as seen in the
Table 1.
The characteristics adopted to define the classes of
hardware, processing capacity and available memory
will serve as the basis for implementations of diffe-
rent types of applications. According to the establis-
hed classes a set of characteristics such as levels of
intelligence, cognition and control, compatible with
the structure of the CPS agent module, will be added
to each component of the class, or even how many
layers of the 5C architecture will be contemplated in
each device.
A survey of SBC corresponding to the Odroid,
Raspberry Pi, Banana Pi and Orange Pi families was
carried out and the following classes were defined:
• Class A - Devices with Quad Core Processors
from 1GHz:
Within this class are the devices with a large pro-
cessing capacity, having processors with 4 cores
that can reach up to 2GHz, and with different
capacities of memories, ranging from 512MB to
2GB. Class A SBC are divided into the following
subclasses:
– Subclass A1 - Quad Core from 1.2 GHz up to
2GHz and 2GB memory;
– Subclass A2 - Quad Core from 1.2 Ghz up to
1.5 GHz and 1GB memory
– Subclass A3 - Quad Core up to 1 Ghz and 1
GB memory;
– Subclass A4 - Quad Core from 1 Ghz up to
1.5GHz and 512 MB memory.
• Class B - Dual Core processors of 1 GHz and me-
mory up to 1 GB:
Class B is characterized by devices that have a
considerable processing rate with 1GHz two-core
processors, and a memory capacity of up to 1GB.
• Class C - Single Core processor with a maximum
of 1 GHz and up to 512 MB of memory:
The class C of SBC is characterized by devices
that have a processing rate, can reach up to 1GHz,
but only 1 core. Another characteristic point of
this class is the low capacity of memory can reach
up to 512 MB.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
588
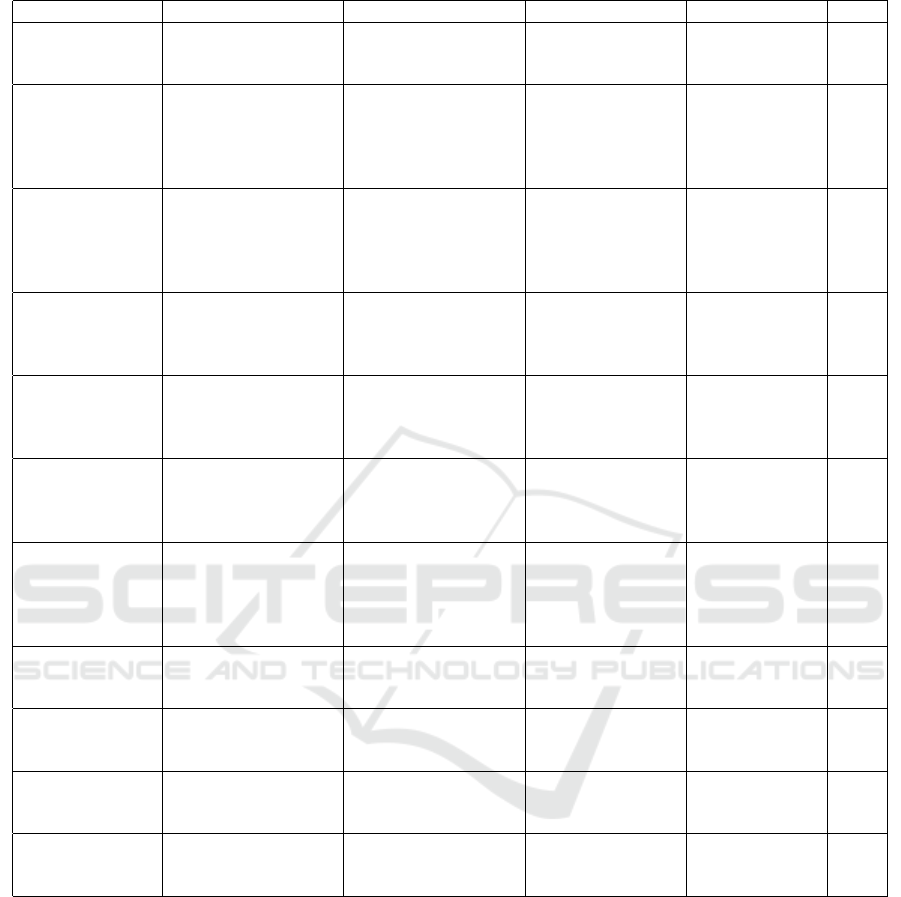
Table 1: Classification of SCB according to their processing and memory capacities.
Device Processing I/O RAM Connectivity Class
Banana Pi R2
ARM Cortex-A7
(ARMv7) 1.2GHz
Quad Core ARMv7
2x USB 2.0
40pin header
2GB DDR3
RAM
Wi-Fi 802.11n
Bluetooth 4.1
Ethernet port
A1
Odroid XU4
Samsung Exynos5422
ARM Cortex-A15
Quad 2.0GHz
2x USB 3.0
1x USB 2.0
30Pin: GPIO/IRQ
/SPI/ADC
12Pin: GPIO /I2S/I2C
2GB LPDDR3
RAM PoP stacked
Ethernet port
WLAN Antenna
A1
Odroid C2
Amlogic ARM
Cortex-A53(ARMv8)
64 bits 1.5Ghz
Quad Core
4x USB 2.0
1x USB OTG
40pin GPIOs
7pin I2S GPIO
]/I2C/ UART/ADC
2GB 32bit DDR3
912MHz RAM
(512MByte x4pcs
Wi-Fi adapter
Ethernet RJ-45
A1
Odroid C0
Amlogic S805 SoC
ARM Cortex-A5
(ARMv7) 1.5GHz
Quad Core ARMv7
2x USB 2.0
40pin (GPIO/UART/
SPI/I2C/ADC)
7pin port (I2S)
1GByte DDR3
32bit RAM
(512MByte x 2pcs)
792Mhz
WLAN
with Antenna
A2
Raspberry Pi 3
Broadcom BCM2837
4 x ARM Cortex-A53
1.2Ghz 64bit ARMv7
4x USB 2.0,
40 pin port
GPIO / UART
/ SPI / I2S
1GB 32bit
LPDDR2
450MHz
Wi-Fi 802.11n
Bluetooth 4.1
Ethernet port
A2
Raspberry Pi 2
Broadcom BCM2836
4x ARM Cortex-A7
900MHz ARMv7
4x USB 2.0,
40pin port
(GPIO/UART/
SPI/I2C/I2S)
1GB 32bit
LP-DDR2
400MHz
Ethernet port A3
Odroid C1+
Amlogic S805 SoC
4x ARM
Cortex-A5 1.5GHz
ARMv7 Architecture
4x USB 2.0
1x USB OTG
40pin GPIO/UART/
SPI/I2C/ADC)
7pin port (I2S)
1GB 32bit
DDR3
792MHz
Gigabit Ethernet
WLAN with
Antenna
A3
Banana Pi Zero
Cortex-A7
(ARMv7) 1.0 GHz
Quad Core ARMv7
Micro USB
40pin GPIO
512 MB DDR3
RAM
Wi-Fi 802.11n
Bluetooth 4.0
A4
Banana Pi M1+
A20 ARM Cortex-A7
(ARMv7) 1.0GHz
Dual Core
2x USB 2.0
40pin (GPIO/UART/
SPI/I2C/ADC)
1GB DDR3
Wi-Fi 802.11n
Ethernet port
B
Raspberry Pi 1
Broadcom BCM2835
ARM11 de 700Mhz
Single Core
2x USB 2.0
40pin GPIO
512 GB 32bit
LP-DDR2
400MHz
Ethernet port C
Raspberry Pi 0 W
Broadcom BCM2835
ARM11 de 1GHz
Single Core
Micro USB
40pin GPIO
512MB
LPDDR2
SDRAM
Wi-Fi: 802.11n
Bluetooth
C
5 INITIAL TESTS
This section will present the scenario in which the ini-
tial tests were carried out. After this the results obtai-
ned with these tests will be presented.
5.1 Methodology
For the initial tests, a Smar PD3 Industrial Didactic
Plant, a Raspberry Pi 3 and a computer (Figure 4)
were used. The industrial plant has several equipment
and instruments such as temperature, flow and level
transmitters. These devices in turn are connected to
the Nexto3030 PLC from the Altus manufacturer.The
algorithm to control the PLC was replaced by one that
has a function that acquires and makes available the
data from the equipment connected to it via Modbus
TCP/IP communication.
With the PLC transmitting plant data via Mod-
bus TCP/IP, a Modbus TCP/IP adapter was imple-
mented in MTConnect. This adapter was implemen-
ted using C++ programming language. The adap-
ter has the function of transforming the data obtai-
ned from the plant to the MTConnect standard. The
Embedded Agent based on Cyber Physical Systems: Architecture, Hardware Definition and Application in Industry 4.0 Context
589
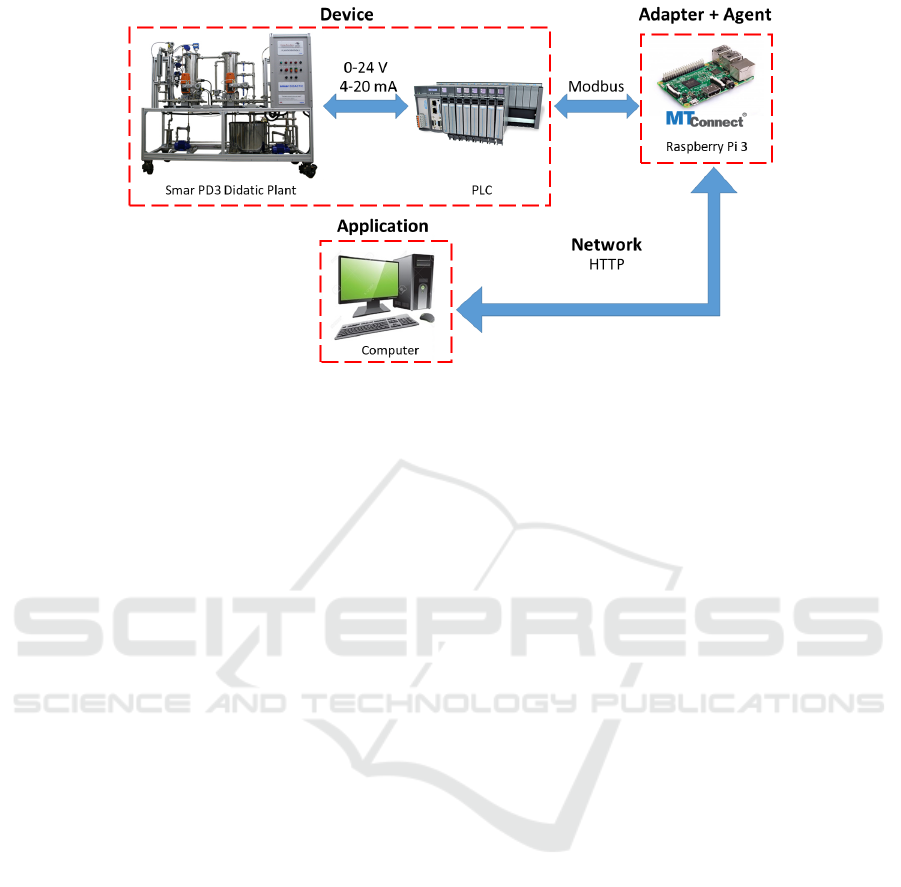
Figure 4: Arrangement and connection of the equipment used in the tests.
topological modeling of the plant was also done in
the MTConnect XML standard. The default agent
was used, which is also implemented in C++. This
agent publishes the adapter data to a standard HTTP
page. The adapter and agent run on a Raspberry Pi
3 connected to the Ethernet network of the PLC. An
internet-connected computer was also used to access
the page that provides the XML generated by MT-
Connect.
5.2 Results
From the implementation of the agent and adapter it
is possible to access through a web browser the HTTP
page that displays an XML generated by MTConnect.
This XML comprises time series of all events, sam-
ples and conditions of the equipment running on the
plant. A cut-off the agent response to the sample com-
mand can be seen in Figure 5. It is noted that the
agent made available all the plant data according to
the XML modeling previously done. A comparison
with data read directly in the PLC proved the accuracy
of the data. It has also been proven that MTConnect
fully implements the communication and conversion
modules, in addition to implementing part of the cy-
bernetic module through buffer, thus justifying its use.
6 CONCLUSIONS AND FUTURE
WORK
This article proposes an architecture of an intelligent
embedded system to compose a Cyber Physical Sy-
stem. The embedded agent was based on the intelli-
gent agent theories and based on the CPS architecture
named 5C.
It has also been demonstrated the application of
this architecture in industrial environments and par-
tial results obtained in the laboratory. Advantages of
this architecture include standardization of communi-
cation, promotion of distributed control, autoconfigu-
ration, visibility and transparency of data as well as
interoperability between agents and applications.
The proposed experiment was able to transform
the Modbus TCP/IP data to the MTConnect standard.
The MTConnect agent has full capability of executing
the communication, conversion, and partial modules
of the cybernetic module. These capabilities justify
their choice for application of this architecture. The
ability of Raspberry Pi 3 to run these modules has also
been proven.
As seen in Section 4, SBC devices are increa-
singly common for applications in industrial solutions
today. And the Raspberry Pi platform has been gai-
ning ground due to its high performance, and a consi-
derable cost compared to other platforms. Raspberry
Pi devices present the desirable requirementes for the
development of this work, as seen in Table 1.
As future work, we can mention the develop-
ment of a connection interface for the industrial plant
equipment to Raspberry, thus dispensing with the use
of PLC. The implementation of the other modules,
fundamental to the architecture presented in this ar-
ticle, must also be performed. Existing technologies
such as OPC UA (Open Platform Communications
Unified Architecture) and PPML (Predictive Model
Markup Language) present themselves as possible so-
lutions for the implementation of these modules be-
cause they have functions provided in them, besides
being standards, thus allowing different tools to speak
the same language.
In addition, it will be necessary to develop or
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
590

Figure 5: Agent response to the Sample command.
adapt essential software for industrial automation
such as SCADA (Supervisory Control Systems and
Acquisition of Data), Distributed Control System
(DCS), and AR-DCS (Augmented Reality Distributed
Control System) (Rodrigues, 2016) for communica-
tion from the MTConnect standard. Finally, perform
performance tests, functionalities and robustness of
this system compared to traditional automation sys-
tems.
ACKNOWLEDGMENT
The authors would like to thank to the funders of this
project FINEP, CAPES, CNPq and the company Altus
for the trust placed in the team for the conclusion of
this project. They also thank the Federal University
of Rio Grande for the space provided in which this
project is developed.
REFERENCES
Barbosa, J., Leit
˜
ao, P., Trentesaux, D., Colombo, A. W., and
Karnouskos, S. (2016). Cross benefits from cyber-
physical systems and intelligent products for future
smart industries. In Industrial Informatics (INDIN),
2016 IEEE 14th International Conference on, pages
504–509. IEEE.
Drath, R. and Horch, A. (2014). Industrie 4.0: Hit or
hype?[industry forum]. IEEE industrial electronics
magazine, 8(2):56–58.
Hermann, M., Pentek, T., and Otto, B. (2016). Design prin-
ciples for industrie 4.0 scenarios. In System Sciences
(HICSS), 2016 49th Hawaii International Conference
on, pages 3928–3937. IEEE.
Jazdi, N. (2014). Cyber physical systems in the context of
industry 4.0. In Automation, Quality and Testing, Ro-
botics, 2014 IEEE International Conference on, pages
1–4. IEEE.
Kagermann, H., Helbig, J., Hellinger, A., and Wahlster, W.
(2013). Recommendations for Implementing the stra-
tegic initiative INDUSTRIE 4.0: securing the future
of German manufacturing industry; final report of the
Industrie 4.0 working group. Forschungsunion.
Kim, K.-D. and Kumar, P. R. (2012). Cyber–physical sys-
tems: A perspective at the centennial. Proceedings of
the IEEE, 100(Special Centennial Issue):1287–1308.
Lee, J., Bagheri, B., and Kao, H.-A. (2015). A cyber-
physical systems architecture for industry 4.0-based
manufacturing systems. Manufacturing Letters, 3:18–
23.
Leitao, P., Karnouskos, S., Ribeiro, L., Lee, J., Strasser,
T., and Colombo, A. W. (2016). Smart agents in in-
dustrial cyber–physical systems. Proceedings of the
IEEE, 104(5):1086–1101.
ModBerry (2017). ModBerry. https://www.iot-store.com.
au/products/modberry-500-m3-max-industrial-embed
ded-raspberry-pi-based-computer. Acessed: 2017-
09-20.
MTConnect (2008). MTConnect Institute. http://www.mt
connect.org. Acessed: 2017-08-13.
netIOT (2017). netPI. https://www.netiot.com/de/netpi/
industrial-raspberry-pi-3/. Acessed: 2017-09-20.
Newark (2014). A brief history of single board computers.
http://www.newark.com/wcsstore/ExtendedSitesCata
logAssetStore/cms/asset/pdf/americas/common/NE1
4-ElectronicDesignUncovered-Dec14.pdf. Acessed:
2017-10-18.
RevolutionPi (2017). Revolution Today. https://revolution.
kunbus.com. Acessed: 2017-09-20.
Rodrigues, N. G. (2016). Augmented reality applied to
data supervision and acquisition systems using mobile
devices. In Brazilian Congress of Automation(CBA)
2016. CBA.
SferaLabs (2017). StratoPi. https://www.sferalabs.cc/ stra
to-pi/ #documentation. Acessed: 2017-09-20.
Shrouf, F., Ordieres, J., and Miragliotta, G. (2014). Smart
factories in industry 4.0: A review of the concept and
of energy management approached in production ba-
sed on the internet of things paradigm. In Industrial
Engineering and Engineering Management (IEEM),
2014 IEEE International Conference on, pages 697–
701. IEEE.
Zhou, K., Liu, T., and Zhou, L. (2015). Industry 4.0: To-
wards future industrial opportunities and challenges.
In Fuzzy Systems and Knowledge Discovery (FSKD),
2015 12th International Conference on, pages 2147–
2152. IEEE.
Embedded Agent based on Cyber Physical Systems: Architecture, Hardware Definition and Application in Industry 4.0 Context
591
