
An Overview of the Quartz Modelling and Simulation Framework
Romain Franceschini
1
, Paul-Antoine Bisgambiglia
1
, Paul Bisgambiglia
1
and David R. C. Hill
2
1
University of Corsica, UMR 6134, Campus Grimaldi, Corte, France
2
Clermont Auvergne University, UMR 6158, ISIMA LIMOS, F-63173 Aubiere, France
Keywords:
Simulation Environment, Discrete-event Simulation, PDEVS, DPDEMAS, multiPDEVS.
Abstract:
Quartz is a modelling and simulation framework enabling the development and the execution of models based
on the Parallel Discrete Event System Specification (PDEVS) formalism. In this paper we give an overview
of the tool by giving details on its design and features. An experimental comparison shows that Quartz yields
performances comparable to what is observed with aDEVS, one of the most efficient tool implemented with
a compiled language. We present our efforts to provide dedicated expressions and verification facilities to the
modeler and give examples of application domains that motivated this software. Namely, agent-based model-
ing through the Dynamic Parallel Discrete Event Multi-Agent (DPDEMAS) specification and multicomponent
modeling with the multiPDEVS formalism.
1 INTRODUCTION
One among the many goals of the modelling and sim-
ulation field is to provide tools to domain experts
so they may design and execute their models in a
convenient way. In this context, an important num-
ber of simulation framework based on the Discrete
Event System Specification (DEVS) formalism (Zei-
gler et al., 2000) or its parallel variant (PDEVS) have
been proposed, e.g. VLE (Quesnel et al., 2009),
PyPDEVS (Van Tendeloo and Vangheluwe, 2014).
The DEVS formalism is a specification language
which offers a precise description of the various enti-
ties involved in the modeling and simulation process.
In this paper we give an overview of Quartz,
a modelling and simulation framework based on
PDEVS (Chow, 1996). Its development is driven by
the following concerns: (1) allow the inclusion of the
framework in a larger simulation environment, (2) of-
fer acceptable performances in comparison with other
PDEVS-based simulators and (3), adopt an architec-
ture which facilitates the addition of new PDEVS
variant formalisms.
Among available simulation tools, three groups
can be established according to their strategy. The
first allows full model compilation with its associ-
ated simulators all into an optimized executable. Con-
sequently, models must be programmed in a techni-
cal languages such as C++, as with the Virtual Lab-
oratory Environment (Quesnel et al., 2009), a.k.a
VLE, or with A Discrete EVent System simulator
(Nutaro, 1999), a.k.a aDEVS. Conversely, a second
group of simulators, such as PyPDEVS (Van Tende-
loo and Vangheluwe, 2014) or DEVS-Ruby (Frances-
chini et al., 2014), are based on interpreted lan-
guages, offering a more readable and intuitive syn-
tax for model developments, at the expense of perfor-
mances. A hybrid approach consists in implementing
parts of the simulator in a compiled language, while
offering a more flexible language to develop mod-
els. DesignDEVS (Goldstein et al., 2017) lies in this
group: mainly implemented in C++, models can be
programmed with the Lua scripting language.
With the use of the Crystal language, Quartz lies
in the first group of simulators implemented with a
technical language. However, due to Crystal similari-
ties with the Ruby syntax, its expressiveness is closest
to simulators belonging to the second group of sim-
ulators. As such, Quartz is able to produce an op-
timized executable since Crystal compiler relies on
the LLVM (Low Level Virtual Machine) infrastruc-
ture while offering a straightforward syntax to pro-
gram models with.
This paper is organized as follows. We first intro-
duce the theory behind the PDEVS formalism and its
capabilities. Afterwards, an overview of the frame-
work is given to show how our concerns impacted its
design. We then focus on the features we introduce to
facilitate model development. Finally, we present the
applications domains that originally motivated the de-
120
Franceschini, R., Bisgambiglia, P-A., Bisgambiglia, P. and Hill, D.
An Overview of the Quartz Modelling and Simulation Framework.
DOI: 10.5220/0006864201200127
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 120-127
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

velopment of Quartz and on which we carry our mod-
elling and simulation efforts.
2 BACKGROUND
The theory of modelling and simulation (TM&S) pro-
posed by (Zeigler et al., 2000) allows describing sys-
tems using the Parallel Discrete Event System Speci-
fication (PDEVS) in a modular and hierarchical way.
A coupled model describes a system as a network of
components while an atomic model describes the au-
tonomous behavior of a system. Formally, an atomic
model is described by M = (X, Y, S, δ
int
, δ
ext
, δ
con
),
where X and Y corresponds to the sets of input and
output port-values. S is the state of the system. Be-
havior is defined by several state transitions, triggered
as events occur. There are two types of events: one
is triggered by the model itself and associated to the
internal transition (δ
int
); the second one depends on
inputs of the model and is associated to the external
transition (δ
ext
). A third transition function (δ
con
) al-
lows to handle simultaneous events of both kinds. In-
ternal events are planned via the time advance func-
tion ta. When they occur, the model can produce out-
puts via the λ function.
PDEVS has well-defined operational semantics
thanks to the definition of abstract simulators, which
means models can be executed unambiguously on a
conforming implementation of the formalism. As
(Vangheluwe, 2000) previously showed, its generic
properties allows to represent other formalism. Con-
sequently, models expressed in several formalism can
be transformed to be executed in the same simulation
framework.
3 OVERVIEW
Quartz is a modelling and simulation framework im-
plemented in the Crystal programming language. It
can be considered as a replacement of DEVS-Ruby
(Franceschini et al., 2014). Crystal syntax is largely
inspired if not identical to the Ruby syntax. Mainly,
differences between the two lies in the possibility for
Crystal to add type annotations, this one being stati-
cally typed with type inference.
The architecture is designed to be generic and ex-
tensible, to allow the addition of other PDEVS-based
formalisms. To help the modeler design its models,
we expose an API (Application Programming Inter-
face) in agreement with the terms and concepts used
or defined by the theory of M&S defined by (Zei-
gler et al., 2000). The architecture respects as much
as possible the explicit separation principle between
modelling and simulation. This way, the modeler
can appreciate a familiar architecture, and can eas-
ily go from the model specification to its implemen-
tation. The generic trait of the software is clearly
due to an extensive use of design patterns (Gamma
et al., 1994), such as Composite, Visitor, Observer,
or Publish-Subscribe. Figure 1 gives an overview of
the simulation components at play in the architecture,
while Figure 2 shows components at play in the mod-
elling part.
Simulation
Simulator
Processor
Coordinator
RootCoordinatorEventSet
1
«interface»
Simulable
realize
1
Notifier
«interface»
Notifiable
listeners
0..*
1
0..*
«interface»
Visitor
ProcessorAllocator
realize
creates
use
Figure 1: Simplified UML class diagram of simulation
components.
Model
AtomicModel CoupledModel
Port
InputPort
OutputPort
«interface»
Observer
State
downward
0..*
upward
0..*
siblings
0..*
«interface»
Observable
«interface»
Coupleable
0..*
host1
0..*
0..*
0..*
«interface»
Visitor
1
eic
0..*
ic
0..*
eoc
0..*
Figure 2: Simplified UML class diagram of modeling com-
ponents.
To better explain our choices, we now develop
each trait that shaped the software design, in partic-
ular: the ability to react to events, modularity, and
performances.
3.1 Events
There are two types of events issued while simulating
a model.
The first type of events is either related to model
state changes or to message passing through model
couplings. Those are issued on a per model-basis
through the Observer pattern. Such design can be
used to develop specific pieces of software that can
react to models dynamics. For example, one can de-
velop a graphical user interface for its model to help
An Overview of the Quartz Modelling and Simulation Framework
121

him better visualize the state of a model, which can
be laid out when necessary. Based on the same idea,
observing a port of a given model may be useful for
a piece of software responsible for plotting its values.
This pattern establish a simple way to react to the evo-
lution of models. It can be used by the modeler for
model-specific code, but can also be used by a larger
M&S environment relying on Quartz as a simulation
kernel.
The second type of events concerns the simula-
tion itself. They are issued to inform in which state
the model execution is. To propagate them, we use
the Publish/Subscribe pattern, so that software com-
ponents may be informed to one or more of the fol-
lowing events, depending on the messages they sub-
scribed for: 1) before/after simulation is initialized;
2) before/after simulation execution; 3) before/after a
simulation is abandoned (through an error or a cancel-
lation); 4) before/after a simulation is restarted. Sim-
ulation events can be useful at many different levels.
For example, the modeler can use them in its mod-
els to prepare or cleanup resources before and after a
simulation (e.g. open or closing a file). For the im-
plementers, this is an opportunity to develop new fea-
tures while having loose coupling between software
components. Finally, simulation events facilitates the
integration of the tool in a larger M&S environment.
In the same way, external plugins can also take ad-
vantage of those events. Also, the exposed simulation
API provides control to execute a simulation step-by-
step, to cancel it, to restart it, or to execute it until a
given virtual time.
3.2 Modularity
Through a modular design, our objective is to make
easier introducing new formalisms compatible with
PDEVS semantics (e.g. a PDEVS extension or a for-
malism that can be translated to PDEVS). Here, we
focus on two aspects illustrating Quartz modularity:
decoupling efforts of the I/O interface and tunable
event sets.
To support interactions between models, PDEVS
defines an input and output interface for each model,
so they can be coupled together. However, modular
couplings through I/O ports is not the only way to al-
low models to interact. In order to support formalisms
based on both modular and non-modular interactions,
a decomposition of the model is necessary to extract
its capacity to have I/O ports, which Quartz does by
providing a specific Coupleable interface (see Figure
2).
As (Van Tendeloo and Vangheluwe, 2014) sug-
gests, the most suitable scheduler directly depends on
the nature of the model. Therefore, we let the mod-
eller configure the scheduler for a specific simulation
usage. For cases where direct connection is disabled,
the modeler can configure the scheduler on a per cou-
pled model basis. We provide several event sets, gath-
ered as subclasses of the EventSet abstract class (see
Figure 1). To obtain better performances we imple-
mented two multi-list based event sets, which as their
names suggest rely on multiple lists to handle events,
deferring sorting process until really needed. We also
provide heap-based event sets, which can be preferred
by the modeller for a more predictable operation cost.
For cases where a specific event set is needed, the
modeler can eventually implements its own EventSet
subclass.
3.3 Performances
This section addresses our efforts to reduce the pro-
cessing time between each scheduled event. We first
focus on the various optimizations we implements,
based on state-of-the art techniques. Then, through an
experiment, we show Quartz provides relative good
performances in comparison with other similar tools.
3.3.1 Optimization Techniques
A substantial amount of work dedicated to perfor-
mance improvement can be found in the literature. As
for Quartz, we treated the following aspects to offer
correct performances: 1) replacement of the original
message passing communication model by sequen-
tializing abstract simulators; 2) simplification of the
model hierarchy when it has a depth superior to one;
3) implementation of a tunable event set, relying on
multiple priority queues where only active models are
considered.
Similarly to (Muzy and Nutaro, 2005), (Him-
melspach and Uhrmacher, 2006) or (Vicino et al.,
2015), Quartz is based on a sequential execution of
models. Message passing suggested in the abstract
simulators is not required and can equivalently be rep-
resented by a simple function call and the use of re-
turn values. As pointed out by (Vicino et al., 2015),
this call/return mechanism results in a predictable call
stack, which is linear to the depth of the model hier-
archy.
Note that if an important number of intermedi-
ate coupled models are to be simulated, the depth of
the hierarchy may cause a performance degradation,
if not cause a stack overflow. As a solution, we use
the direct connection (Chen and Vangheluwe, 2010),
an optimization technique that transforms the model
hierarchy in order to simplify it. The goal is to re-
duce the depth of the tree by removing intermediate
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
122
coupled models, and by adjusting couplings between
models accordingly.
Direct connection allows to shorten the path a
message must take, but does not necessarily imply im-
proved execution time since as a result, the number of
models to be managed by a now unique coordinator
is larger. Depending on the naiveness of the event set
associated with the coordinator, which is responsible
to schedule events, processing time may become wor-
rying. Several multi-list based event sets, such as the
ladder queue (Tang et al., 2005) claim constant amor-
tized complexity for their operations. Those organize
events in different groups, which allows to postpone
sorting process until really needed, only on a small
part of queued events. Quartz provides an implemen-
tation of some of these structures, and lets the mod-
eller choose which to use as described in section 3.2.
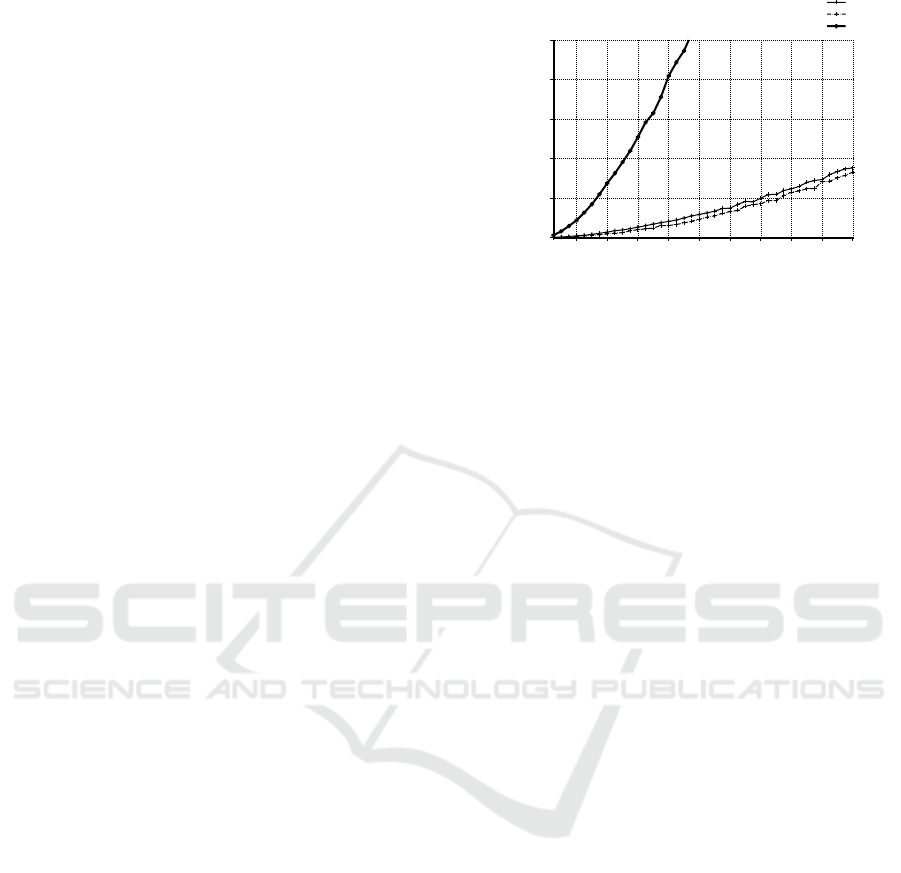
3.3.2 Experimental Comparison
In order to evaluate performances of the framework
in comparison with other tools, results of an experi-
mental benchmark is proposed. We compare Quartz
with DEVS-Ruby (Franceschini et al., 2014), the tool
which influenced the presented framework, and with
aDEVS (Nutaro, 1999) which is considered in the lit-
erature as one of the most performing PDEVS based
simulator (Van Tendeloo and Vangheluwe, 2016).
The DEVStone benchmark (Wainer et al., 2011)
is used, it has been specifically proposed to com-
pare DEVS simulators and generates automatically
a model hierarchy following a configurable structure
and behavior. The environment used for our com-
parison is based on a Intel CoreTM i5-3360M, 16
GB (2xDDR3 1600Mhz) of RAM and a Toshiba
MK5061GS hard drive. The software stack relies
on Ubuntu 16.04, the Quartz framework (commit
a663dfe) compiled with Crystal 0.24.0 (in release
mode), aDEVS 2.8.1 compiled with gcc 4.8.2 (-O3
flags), and DEVS-Ruby 0.5.1 interpreted by Ruby
2.2. Mean wall clock time of 10 repetitions is mea-
sured for each platform. DEVStone is configured
with a fixed depth of 3, the ”HI” coupling type and
transition functions times set to 0secs. The varying
parameter is the width, which corresponds to the num-
ber of models in each level of the hierarchy.
Figure 3 is a graph of the results for each bench-
marked simulator. As we hoped for, the port of
DEVS-Ruby in Crystal results in a substantial perfor-
mance benefit since Quartz is significantly faster than
DEVS-Ruby. Moreover, Quartz is on the same order
of performance as aDEVS, which validates its effec-
tiveness.
0
0.2
0.4
0.6
0.8
1
200 400 600 800 1000 1200 1400 1600 1800 2000
Elapsed time (s)
DEVStone width
aDEVS 2.8.1 (gcc 4.8.2 -O3)
Quartz a663dfe (crystal 0.24.0)
DEVS-Ruby 0.5.1 (Ruby 2.2)
Figure 3: Mean execution times of each platform for the
DEVStone benchmark with a varying numbers of models.
4 MODEL DEVELOPMENT
To facilitate model development and its execution,
we address two particular issues. Given Quartz is a
framework, no GUI is proposed to help model design.
However, we propose dedicated expressions which
make programming models less tedious while allow-
ing to gather data about models statically. Also, in
order to guaranty models respects PDEVS syntax, we
work on a verification system that allows to detect er-
rors statically or at runtime.
4.1 Dedicated Expressions
Our framework does not provide a graphical environ-
ment for the modeling phase. Instead, we rely on the
modeller capability to program its models given the
exposed API. Given models must be programmed, an
important aspect is to lower the barrier by easing code
reading and writing. With meta-programming tech-
niques, we offer a set of dedicated expressions. Crys-
tal supports lexical closures and has a macro system
allowing to react to specific changes during the con-
struction of the abstract syntax tree (AST) of a pro-
gram, which makes it well adapted to the definition
of a domain-specific language. Since the main part of
model code is found in atomic models, we here focus
on specific expressions we offer to ease programming.
Those are implemented using macros and are part of
the DSEL. The first ones ease ports definition whereas
the second one ease state variables declaration.
4.1.1 Ports Declaration
Two expressions allows to declare ports associated
with a model at the class-level. Adding an input port
is associated with the input keyword; adding an out-
put port is associated with the output keyword. Both
An Overview of the Quartz Modelling and Simulation Framework
123
are formally defined by the following BNF expres-
sion:
< ident > : := / a-ZA - Z_ /{/ a - ZA - Z0 -9 _ / }
< p ort nam e > ::= < ident > | ( ’" ’ < ident >
’" ’) | ( ’: ’ < por tna me >)
< por tdef > ::= (" i nput " | " outp u t ")
< p ort nam e > { ’ , ’ < por tname > }
Using such keywords is more concise than using
the provided API. Without them, the modeler has to
overload the constructor and use specific methods to
attach ports to the the model.
4.1.2 State Variables Declaration
Another expression is dedicated to the declaration of
a state variable associated with a model. The mod-
eler is then able to specify the name and type of each
variable using the state_var keyword, and may also
provide an initial value to it. It is defined by the fol-
lowing BNF expressions:
<type > ::= /A -Z / { / a - zA -Z0 -9/ }
<svar > ::= " st a t e _ v a r "
< ident > ’: ’ < type > [( ’= ’ < arg >) | <
block >]
Note that <arg> and <block> terms represents any
argument that is assignable to a lexical closure as de-
fined by the Crystal syntax. There is no restriction on
which type may be used as a state variable, so it is
possible to use advanced data structures. In addition
to make state variable declaration shorter, this macro
allows to identify statically all instance variables that
are part of the state of a model. We take advantage of
this via meta-programming techniques in order to pro-
vide several features seamlessly by generating auto-
matically: 1) model constructors for model initializa-
tion; 2) encapsulation of the state variables; 3) a spe-
cific State subclass associated with the model; 4) the
serialization and deserialization of the model state;
5) specific code to ease model parameters exploration.
4.2 Verification
Verification can be used to make sure a model does
not include errors. This process can be achieved
on different levels: either statically (before or dur-
ing compilation) or at runtime (during a simulation).
Some errors are tied to the specificities of a model,
whereas others are more generic. Generic ones can
be verified no matter which model is to be verified.
As one of our aim is to enforce modeling constraints,
Quartz attempts to detect some errors both at runtime
or statically.
4.2.1 Runtime Verifications
Quartz applies some generic verifications at runtime.
Those are related to generic properties that can be
verified for all PDEVS models, and includes: 1) re-
sult positivity when applying the time advance func-
tion; 2) couplings validity (e.g. no feedback loops, in-
volved models belonging to a common coupled model
or to the coupled itself); 3) belonging of ports ref-
erenced in a given output to the appropriate model;
4) compatibility of the processor with its associated
model.
As for errors related to models themselves, a fea-
ture allow the modeler to express specific properties
about their models that can be checked during sim-
ulation. Albeit this feature is not meant to perform
an exhaustive exploration of all possible states of a
model, invalid states can eventually be detected dur-
ing an iteration of the M&S process.
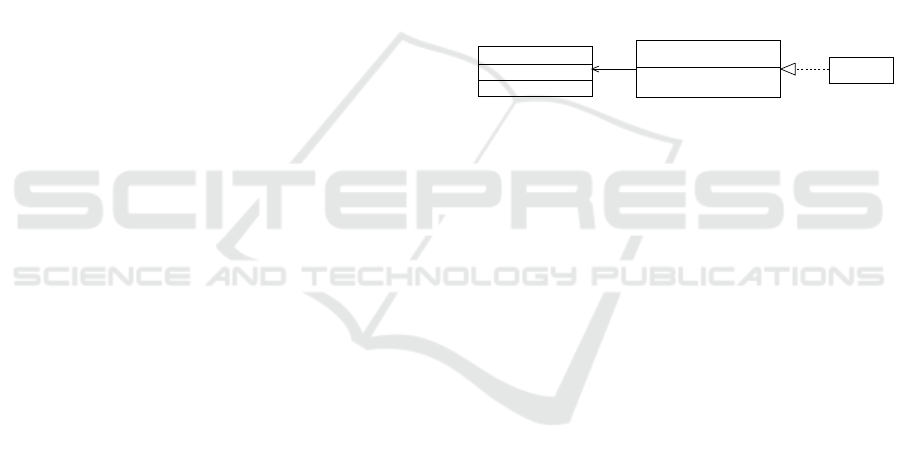
AtomicModel
RuntimeChecker
contexts: Array<Symbol>
check(instance: Verifiable)
«interface»
Verifiable
valid?(context: Symbol): Bool
errors(): Array<VerificationError>
0..*
Figure 4: UML class diagram of components involved in
runtime checks.
Figure 4 shows software components used to ver-
ify the state of a model. Atomic models implement
the Verifiable interface, and consequently hold a
reference to components encapsulating user-defined
rules used to test properties (i.e. RuntimeChecker).
The modeler can specialize this component or use a
predefined subclass.
In order to perform such verifications, each new
state produced after a transition triggers a check. If
the feature is enabled and that an error is detected, a
strict mode interrupts the simulation, while a normal
model warns the user.
A dedicated expression can be used to define prop-
erties to be checked. Following the approach we de-
scribed in section 4, properties are declared using the
check keyword at the class-level, in the same way as
for the state_var keyword.
Listing 1 shows the definition of a sample model.
In this example, all instances of SampleModel will
have a state ”bearing” whose type is a 2 bytes integer
representing an angular value. The check keyword is
used to verify that the angle is always in [0, 360[.
cl a ss S a m p l e M o d e l < AtomicModel
stat e _ v a r bearin g : Int 16 = 90
ch e ck : beari ng , n u m e r i c a l i t y : { gte :
0, lt : 3 60}
def i n t e r n a l_t r a n s i t i on
@be a r i n g = -123
end
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
124

end
Listing 1: Definition of a sample model using dedicated
expressions.
The internal transition assigns an invalid value to the
bearing variable. The error is catched at runtime and
produce the following output:
(10:17 : 5 1 : 2 7 3 ) > ’ nav ’ is i n v alid (
con t e x t : ’ internal_trans i t i o n ’ , v time :
1. 0) . Erro r s : [’ beari ng ’ mu st be
gre a t e r tha n or eq u al to 0]
4.2.2 Static Verifications
Compared to checks performed at runtime, static ver-
ification can detect errors much earlier in the develop-
ment process of a model. It is preferable since compi-
lation can be aborted if errors are detected. According
to the adopted metamodel, a language type system al-
ready allows to statically raise some structural errors.
However, some syntactic errors are more difficult to
detect and require a specific analysis of the program
syntax tree. Using Crystal macro system, we are able
to react to specific events during compilation. For ex-
ample, the inherited macro definition within a class
offers an opportunity to apply verifications to all its
subclasses.
As a proof of concept, we give an example by
checking if the time advance function of an atomic
model is syntactically correct. Since Quartz use in-
stance variables to store the state of an atomic model,
any method can access and mutate its state. If this
is consistent with PDEVS regarding transitions func-
tions, it is not the case for the time advance function.
Here, all methods that belongs to AtomicModel sub-
classes are checked. When the method corresponds to
the time advance function, its body is inspected via a
macro. If an instance variable marked as a state vari-
able is modified, compilation is aborted with a con-
textual error message.
cl a ss MyMod e l < A t o m i c M o d e l
stat e _ v a r x : Int 3 2
def tim e _ a d v a n c e
@x = 54
re t u rn I N F INITY
end
end
Listing 2: Definition of an erroneous atomic model.
An example, Listing 2 defines an atomic model
which is valid regarding Crystal language seman-
tics, but invalid regarding PDEVS semantics. This
is caught at compile time by the rule described earlier
and produces the following output:
Er r or in e x a m p les / my m o del . cr :2 1: " you
are not s u p p o s ed to mut a te th e sta te
of an a tomi c m o del f rom the #
time_advance m e thod ."
@x = 54
ˆ˜˜ ˜ ˜ ˜ ˜
We should emphasize this particular check can be
avoided by adopting a metamodel which strictly con-
forms to the formalism. We could instead encapsulate
the state in an immutable data type and pass it to the
time advance function, at the expense of expressivity.
We defined additional rules using this technique to
enforce PDEVS constraints, such as preventing ports
creation or removal outside the constructor, prevent-
ing state modification from λ function, or preventing
the deposit of an output value outside λ.
However, this technique has limits. Crystal
macros are interpreted and can slow down compile
times. Also, more complicated rules are difficult to
implement and hard to follow given the particular syn-
tax of Crystal macros. We currently explore an alter-
native which consists in developing a static analysis
tool to freely explore the abstract syntax tree. Since
Crystal compiler is self-bootstrapped, we can use its
parser and lexical analyzer to implement our model
analysis on top of the semantic analysis done by the
compiler itself.
5 APPLICATIONS
Due to its generic design, Quartz can be used to de-
velop any kind of PDEVS models and is not tied
to a specific domain. As we showed in section 3,
its modularity promotes the integration of new for-
malisms provided that their semantics conforms to
that of PDEVS.
However, two main reasons motivated the devel-
opment of Quartz. The first one was to support a
multi-component approach, where models can influ-
ence each other directly instead of interacting through
I/O ports. The second reason was to facilitate the
modelling and simulation of agent-based models by
implementing the Dynamic Parallel Discrete Event
Multi-Agent Specification (Franceschini et al., 2017),
which formalizes the entities at play in a multi-agent
system using PDEVS constructs.
5.1 Multi-component Models
We used Quartz to implement the multiPDEVS for-
malism (Foures et al., 2018), which enable interac-
tions between components in a non-modular way. In-
stead of interacting through messages, components
An Overview of the Quartz Modelling and Simulation Framework
125
influence each other directly via state transitions.
While multiPDEVS lies in a lower level than a mod-
ular coupled network of systems such as PDEVS,
some class of systems may be best modelled in a non-
modular way. For example, systems such as cellu-
lar automata, individual-based models, and eventually
cellular environments in agent-based systems may be
good candidates.
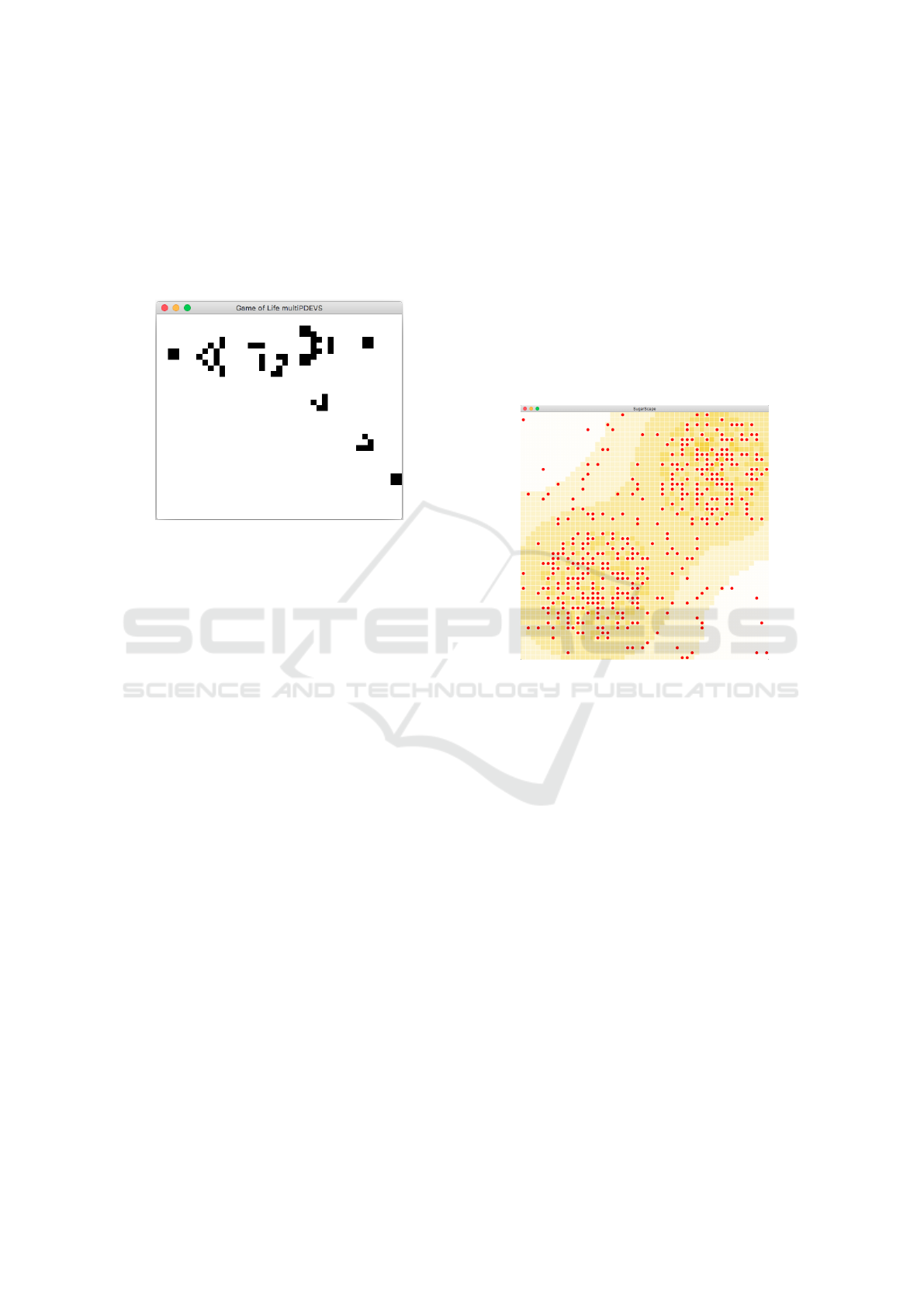
Figure 5: A visualization of a classic Game of Life model
based on the multiPDEVS formalism.
Both modular and non-modular approaches can
be mixed to represent a particular system. First for-
mally, since a multiPDEVS model can be coupled
together with other PDEVS models, as showed in
(Foures et al., 2018), and secondly, on the implemen-
tation side as showed in section 3.2.
Although it can be used for other purposes, we
use multiPDEVS to represent spatially-explicit sys-
tems. For example, Figure 5 shows a visualization
of a cellular automaton modelled using multicompo-
nent capability of Quartz: the classic John Conway’s
Game of Life. In a similar way, we used the multi-
component approach to represent a firespread model
as a cellular automaton (Foures et al., 2018). As we
will see in the next section, we also use multicom-
ponent models within modular systems to represent
multi-agent systems.
5.2 Agent-based Models
Although Quartz is provided as a generic modelling
and simulation framework and as such, can be applied
to various domains, we personally intend to apply it
for multi-agent based simulation.
This software original main purpose was to pro-
vide a simulation kernel for a multi-agent system
specification based on PDEVS and various exten-
sions. The DPDEMAS (Dynamic Parallel Discrete
Event Multi-Agent System) specification (Frances-
chini et al., 2017) formalizes generic entities which
may compose an agent-based model. Given the
amount of components and interactions involved in
a multi-agent system and the diversity of application
domains, it is difficult to express it in a single formal-
ism. As mentioned in section 2, PDEVS is often used
as a pivotal formalism. Models originally defined in
other formalisms can be equivalently expressed using
PDEVS. Hence, PDEVS was chosen to define DPDE-
MAS since it allows to couple heterogeneous models
modularly. DPDEMAS provides a well-defined struc-
ture for components that can be found in agent-based
models, such as agents and environments. Seman-
tics are also well defined, since actions performed by
agents in their environment or interactions between
agents are also formalized.
Figure 6: A visualization showing the environment of the
SugarScape agent-based model (Epstein and Axtell, 1996).
Following this approach and the Quartz frame-
work, we replicated several classic agent-based mod-
els, such as the SugarScape (Epstein and Axtell,
1996) model. Figure 6 shows a visualization of the
SugarScape multi-agent system implemented using
the DPDEMAS specification.
6 CONCLUSIONS
In this paper, we gave an overview of the Quartz
modelling and simulation framework. We described
its architecture as well as its features. The modular
and extensible architecture conforms with the princi-
ple of separation between modelling and simulation.
By this mean, integration of new formalisms is pos-
sible. The API allows to react to events issued by
the models or their processors during simulation. We
worked on several aspects of the framework to pro-
vide acceptable performances, in particular: (1) a se-
quential architecture, which provides predictable exe-
cution, (2) schedulers providing a constant amortized
complexity for all operations and (3), an automatic
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
126

transformation of the model hierarchy to a depth of
one. Originally inherited from DEVS-Ruby (Frances-
chini et al., 2014), we showed that Quartz allows to
combine expressiveness with the performances of a
compiled language. To facilitate model development,
we described a set of dedicated expressions aiming
to simplify model programming, as well as a verifica-
tion technique to detect potential errors about models,
either statically or at runtime.
As a perspective of this work, we wish to de-
velop Quartz by focusing on four aspects: (1) grow
the set of dedicated expressions in order to offer a
more complete domain-specific language and eventu-
ally consider a domain-specific external language; (2)
improve static verifications based on macros by devel-
oping a static analysis tool; (3) implement distributed
simulation algorithms; (4) promotes the tool through
a rich documentation to facilitate its use.
ACKNOWLEDGEMENTS
This work is supported by the Corsican region (CTC)
and the European Union (EU) through a PO-FEDER
regional program: MoonFish.
REFERENCES
Chen, B. and Vangheluwe, H. (2010). Symbolic Flattening
of DEVS Models. In Proceedings of the 2010 Sum-
mer Computer Simulation Conference, pages 209–
218, San Diego, CA, USA. Society for Computer Sim-
ulation International.
Chow, A. C. H. (1996). Parallel DEVS: A parallel, hi-
erarchical, modular modeling formalism and its dis-
tributed simulator. TRANSACTIONS of the Society for
Computer Simulation International, 13:55–67.
Epstein, J. M. and Axtell, R. L. (1996). Growing Artificial
Societies. Social Science from the Bottom Up. The
MIT Press.
Foures, D., Franceschini, R., Bisgambiglia, P.-A., and Zei-
gler, B. P. (2018). multiPDEVS: A Parallel Multicom-
ponent System Specification Formalism. Complexity,
2018(3751917):19.
Franceschini, R., Bisgambiglia, P.-A., and Bisgambiglia,
P. (2017). Approche formelle pour la mod
´
elisation
et la simulation de syst
`
emes multi-agents. In Vingt-
cinqui
`
emes Journ
´
ees Francophones sur les Syst
`
emes
Multi-Agents, pages 193–202, Caen, France.
Franceschini, R., Bisgambiglia, P.-A., Bisgambiglia, P., and
Hill, D. R. C. (2014). DEVS-Ruby: a Domain Specific
Language for DEVS Modeling and Simulation (WIP).
In DEVS 14: Proceedings of the Symposium on The-
ory of M&S, pages 393–398. SCS International.
Gamma, E., Helm, R., Johnson, R., and Vlissides, J.
(1994). Design Patterns: Elements of Reusable
Object-Oriented Sofware. Addison Wesley.
Goldstein, R., Breslav, S., and Khan, A. (2017). Practical
aspects of the DesignDEVS simulation environment.
SIMULATION.
Himmelspach, J. and Uhrmacher, A. M. (2006). Sequential
Processing of PDEVS models. In Proceedings of the
3rd EMSS, pages 239–244.
Muzy, A. and Nutaro, J. (2005). Algorithms for efficient
implementations of the DEVS & DSDEVS abstract
simulators. In 2008 12th IEEE International Sympo-
sium on Distributed Simulation and Real-Time Appli-
cations (DS-RT), pages 273–279. IEEE.
Nutaro, J. (1999). ADEVS (A Discrete EVent
System simulator). Arizona Center for Inte-
grative Modeling {&} Simulation (ACIMS),
University of Arizona, Tucson. Available at
http://www.ece.arizona.edu/nutaro/index.php.
Quesnel, G., Duboz, R., and Ramat, E. (2009). The Virtual
Laboratory Environment – An operational framework
for multi-modelling, simulation and analysis of com-
plex dynamical systems. Simulation Modelling Prac-
tice and Theory, 17(4):641–653.
Tang, W. T., Goh, R. S. M., and Thng, I. L.-J. (2005).
Ladder Queue: An O(1) Priority Queue Structure
for Large-scale Discrete Event Simulation. ACM
Transactions on Modeling and Computer Simulation,
15(3):175–204.
Van Tendeloo, Y. and Vangheluwe, H. (2014). The Modular
Architecture of the Python(P)DEVS Simulation Ker-
nel Work In Progress paper. In Proceedings of the
Symposium On Theory of Modeling and Simulation
(TMS’14) SpringSim 2014, pages 387–392, Tampa,
FL, USA. SCS.
Van Tendeloo, Y. and Vangheluwe, H. (2016). An evalua-
tion of DEVS simulation tools. SIMULATION.
Vangheluwe, H. (2000). DEVS as a common denomina-
tor for multi-formalism hybrid systems modelling. In
IEEE International Symposium on Computer-Aided
Control System Design, 2000. CACSD 2000, pages
129–134. IEEE.
Vicino, D., Niyonkuru, D., Wainer, G. A., and Dalle, O.
(2015). Sequential PDEVS Architecture. In DEVS
15: Proceedings of the Symposium on Theory of Mod-
eling & Simulation: DEVS Integrative M&S Sympo-
sium, pages 906–913, Alexandria, VA, USA.
Wainer, G. A., Glinsky, E., and Gutierrez-Alcaraz, M.
(2011). Studying performance of DEVS modeling and
simulation environments using the DEVStone bench-
mark. SIMULATION, 87(7):555–580.
Zeigler, B. P., Kim, T. G., and Praehofer, H. (2000). Theory
of Modeling and Simulation, 2nd Ed. Integrating Dis-
crete Event and Continuous Complex Dynamic Sys-
tems. Academic Press, Orlando, FL, USA, 2nd edi-
tion.
An Overview of the Quartz Modelling and Simulation Framework
127
