
Improved Discrete RRT for Coordinated Multi-robot Planning
Jakub Hv
ˇ
ezda
1,2
, Miroslav Kulich
1
and Libor P
ˇ
reu
ˇ
cil
1
1
Czech Institute of Informatics, Robotics, and Cybernetics, Czech Technical University in Prague, Prague, Czech Republic
2
Department of Cybernetics, Faculty of Electrical Engineering, Czech Technical University in Prague, Czech Republic
Keywords:
Multi-robot Systems, Trajectory Planning, Coordination, Rapidly-Exploring Random Tree.
Abstract:
This paper addresses the problem of coordination of a fleet of mobile robots – the problem of finding an optimal
set of collision-free trajectories for individual robots in the fleet. Many approaches have been introduced
during last decades, but a minority of them is practically applicable, i.e. fast, producing near-optimal solutions,
and complete. We propose a novel probabilistic approach based on the Rapidly Exploring Random Tree
algorithm (RRT) by significantly improving its multi-robot variant for discrete environments. The presented
experimental results show that the proposed approach is fast enough to solve problems with tens of robots in
seconds. Although the solutions generated by the approach are slightly worse than one of the best state-of-
the-art algorithms presented in (ter Mors et al., 2010), it solves problems where ter Mors’s algorithm fails.
1 INTRODUCTION
Recent advances in mobile robotics and increased de-
ployment of robotic systems in many practical appli-
cations lead to intensive research of multi-robot sys-
tems. One of the most important problems is the coor-
dination of trajectories of individual robots/agents in
such systems: given starting and destination positions
of the robots, we are interested in finding their tra-
jectories that do not collide with each other, and the
overall cost is minimized. An optimization criterion
can be a sum of lengths of the individual trajectories
or the time the last robot reaches its destination posi-
tion.
Several fields of the industry such as airports are
nowadays faced with a higher increase in traffic than
the actual capacity. This leads to reliance on path opti-
mizations to increase their throughput. Another typi-
cal application where multi-robot coordination plays
an important role might be planning in an automa-
ted warehouse, see Fig. 1, where autonomous robots
effectively deliver desired goods from/to given positi-
ons.
Multi-robot path planning and motion coordina-
tion has been studied since the 1980s, and many
techniques have been developed during this period,
see (Parker, 2009) for a nice overview. This pro-
blem (formulated as the warehouseman’s problem)
was proved to be PSPACE-complete (Hopcroft et al.,
1984). For the case where robots move on a predefi-
Figure 1: Automated warehouse: G-COM system by Gren-
zebach (https://www.grenzebach.com) in a costumer appli-
cation.
ned graph complexity of the problem can be reduced,
nevertheless, it is still NP-hard (Goldreich, 2011),
which means that optimal solutions cannot generally
be found in a reasonable time for non-trivial instances
(e.g., for a number of robots in order of tens).
Solutions to the problem consider either cou-
pled or decoupled approaches. Centralized (cou-
pled) approaches consider the multi-robot team as
a multi-body robot for which classical single-robot
path planning can be applied in composite configu-
ration space. Traditional centralized methods are ba-
sed on complete (i.e., the algorithm finds a solution if
it exists or reports that no solution exists otherwise)
and optimal classical algorithms and provide optimal
solutions (Latombe, 1991), (Lavalle, 1998), (Ryan,
Hv
ˇ
ezda, J., Kulich, M. and P
ˇ
reu
ˇ
cil, L.
Improved Discrete RRT for Coordinated Multi-robot Planning.
DOI: 10.5220/0006865901710179
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 171-179
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
171

2008). However, these approaches require computati-
onal time exponential in the dimension of the com-
posite configuration space, so they are appropriate
for small-sized problems only. This drawback leads
to the development of methods that prune the search
space. For instance, Berg et al. (van den Berg et al.,
2009) decompose any instance of the problem into
a sequence of sub-problems where each subproblem
can be solved independently from the others. The Bi-
ased Cost Pathfinding (Geramifard et al., 2006) em-
ploys generalized central decision maker that resol-
ves collision points on paths that were pre-computed
independently per unit, by replanning colliding units
around the highest priority unit. Another approach is
to design an algorithm based on a specific topology
describing the environment. (Peasgood et al., 2008)
present a multi-phase approach with linear time com-
plexity based on searching a minimum spanning tree
of the graph, while an approach for grid-like environ-
ments is introduced in (Wang and Botea, 2008). A
flow-annotated search graph inspired by two-way ro-
ads is built to avoid head-to-head collisions and to re-
duce the branching factor in search. Nevertheless, the
computational complexity is still high (e.g., (van den
Berg et al., 2009) solves a problem with 40 robots in
12 minutes, (Wang and Botea, 2008) needs approx.
30 seconds for 400 robots).
On the contrary, decoupled methods present a
coordination phase separated from the path planning
phase. These approaches provide solutions typically
in orders of magnitude faster times than coupled plan-
ners, but these solutions are sub-optimal. Moreover,
the decoupled methods are often not complete as they
may suffer from deadlocks. These approaches are di-
vided into two categories: path coordination techni-
ques and prioritized planning. Path coordination con-
siders tuning the velocities of robots along the pre-
computed trajectories to avoid collisions (LaValle and
Hutchinson, 1998), (Simeon et al., 2002), while pri-
oritized planning computes trajectories sequentially
for the particular robots based on the robots’ priori-
ties. Robots with already determined trajectories are
considered as moving obstacles to be avoided by ro-
bots with lower priorities (van den Berg and Over-
mars, 2005), (Bennewitz et al., 2001), (Cap et al.,
2015). A similar idea was presented in (ter Mors
et al., 2010), where adaptation of the A* algorithm
is sequentially planning on a graph augmented by in-
formation in which time intervals the particular nodes
are occupied by already processed robots.
Several computationally efficient heuristics have
been introduced recently enabling to solve problems
for tens of robots in seconds. Windowed Hierarchical
Cooperative A* algorithm (WHCA*) employs heu-
ristic search in a space-time domain based on hier-
archical A* limited to a fixed depth (Silver, 2005).
Chiew (Chiew, 2010) proposes an algorithm for n
2
vehicles on a n × n mesh topology of path network
allowing simultaneous movement of vehicles in a cor-
ridor in opposite directions with computational com-
plexity O(n
2
). Luna and Bekros (Luna and Bekris,
2011) present a complete heuristics for general pro-
blems with at most n − 2 robots in a graph with n
vertices based on the combination of two primitives
- “push” forces robots towards a specific path, while
“swap” switches positions of two robots if they are to
be colliding. An extension which divides the graph
into subgraphs within which it is possible for agents
to reach any position of the subgraph, and then uses
“push”, “swap”, and “rotate” operations is presen-
ted in (DeWilde et al., 2014). Finally, Wang and
Wooi (Wang and Goh, 2015) formulate multi-robot
path planning as an optimization problem and approx-
imate the objective function by adopting a maximum
entropy function, which is minimized by a probabilis-
tic iterative algorithm.
Although many of the approaches mentioned
above have nice theoretical properties, the most
practically usable algorithm is probably Context-
Aware Route Planning (CARP) presented in (ter Mors
et al., 2010) as it is fast, produces solutions of high
quality, and although it is not complete, it finds a so-
lution for a large number of practical setups.
(Kiril Solovey, 2014) presented MRdRRT algo-
rithm, which is a probabilistic approach for path
planning on predefined structures for relatively small
number of robots inspired by RRT algorithm (Lavalle,
1998). (Dobson et al., 2017) improves upon MR-
dRRT by presenting its optimal variant.
In this paper, we present a probabilistic appro-
ach which extends and improves a discrete version
of Rapidly-Exploring Random Tree (RRT) for mul-
tiple robots (Kiril Solovey, 2014). Our approach fo-
cuses mainly on scalability with increasing number
of agents as well as improving the quality of solu-
tion compared to (Dobson et al., 2017) that presents
the optimal version of the dRRT algorithm but keeps
the number of robots relatively low. We show that
the proposed extensions allow solving problems with
tens of robots in times comparable to CARP with a
slightly worse quality of results. On the other hand,
the proposed algorithm finds solutions also for setups
where CARP fails.
The rest of the paper is organized as follows. The
multi-agent path-finding problem is presented as well
as the used terms are defined in Section 2. The multi-
robot discrete RRT algorithm and the proposed im-
provements are described in Section 3, while perfor-
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
172

med experiments, their evaluation, and discussion are
presented in Section 4. Finally, Section 5 is dedicated
to concluding remarks.
2 PROBLEM DEFINITION
Multi-agent pathfinding/coordination is a problem
that is concerned about finding paths for multiple
agents from their given start locations to their target
locations without colliding with each other or obsta-
cles in the environment while also optimizing a global
cost function.
To specify the problem more precisely, assume:
• A set of k homogenous agents each labeled
a
1
, a
2
, ..., a
k
.
• A graph G(V, E) where |V | = N. The vertices V of
the graph are all possible agent’s locations, while
E represents a set of all possible agent’s transiti-
ons between the locations.
• A start location s
i
∈ V and a target location t
i
∈ V
of each agent.
The aim is to find a set of collision-free trajecto-
ries on G(V, E) each of them specifying locations of
an individual agent at all time moments so that agents
are at their start locations initially and at their goal lo-
cations finally. Note that the time is discretized into
time moments to simplify the problem.
The following paragraphs explain key used terms
and specify additional constraints to the generated tra-
jectories.
2.1 Actions
Every agent can perform two types of action at each
time point: It can either move into one of the neighbo-
ring nodes, or it can wait at its current location. Every
algorithm can make different assumptions regarding
the cost of these actions, but we assume that staying
idle has zero cost of distance traveled, but costs time.
Furthermore, once an agent reaches its target location,
it waits at this location for other agents to finish.
2.2 Constraints
The main constraints on agent movement assumed in
this paper are:
• No two agents a
1
and a
2
can occupy the same ver-
tex v ∈ V at the same time.
• Assume two agents a
1
, a
2
located in two neighbo-
ring nodes v
1
, v
2
∈V respectively, they can not tra-
vel along the same edge (v
1
, v
2
) at the same time
in opposite directions. In other words, two neig-
hboring agents cannot swap positions. However,
it is possible for agents to follow one another as-
suming that they do not share the same vertex or
edge concurrently. For example, if the agent a
1
moves from v
2
∈ V to v
3
∈ V then the agent a
2
can move from v
1
∈ V to v
2
∈ V at the same time.
2.3 Composite Configuration Space
The composite configuration space G = (V , E) is a
graph that is defined as follows. The vertices V are all
combinations of collision-free placements of m agents
on the original graph G. These vertices can also be
viewed as m agent configurations C = (v
1
, v
2
, ..., v
m
),
where an agent a
i
is located at a vertex v
i
∈ G and
the agents do not collide with each other. The edges
of G can be created using either Cartesian product or
Tensor product. For the purposes of this paper the
Tensor product is used because is allows simultaneous
movement movement of multiple agents and thus for
two m agent configurations C = (v
1
, v
2
, ..., v
m
), C
0
=
(v
0
1
, v
0
2
, ..., v
0
m
) the edge (C,C
0
) exists if (v
i
, v
0
i
) ∈ E
i
for
every i and no two agents collide with each other du-
ring the traversal of their respective edges.
The distance between two neighboring nodes C
1
=
(v
11
, v
12
, ..., v
1n
) and C
2
= (v
21
, v
22
, ..., v
2n
) in a com-
posite roadmap is calculated as the sum of Euclidean
distances d between the corresponding nodes:
δ(C
1
,C
2
) =
n
∑
i=0
d(v
1i
, v
2i
)
3 PROPOSED ALGORITHM
3.1 Discrete RRT
A discrete multi-robot rapidly-exploring random tree
(MRdRRT)(Kiril Solovey, 2014) is a modification of
the RRT algorithm for pathfinding in an implicitly
given graphs embedded in a high-dimensional Euc-
lidean space.
Just like RRT, the MRdRRT grows a tree T rooted
in the vertex s representing start positions of the ro-
bots in a composite configuration space R
d
by iterati-
vely adding new points to the tree while also trying to
connect to the goal configuration t without violating
any constraints, e.g. collision with the environment.
The growth is achieved by randomly sampling a point
u in the composite configuration space and then ex-
tending the tree towards this sample. Note that verti-
ces newly added to the tree are taken from G: given
a sample u and the node v ∈ V nearest to it, the best
Improved Discrete RRT for Coordinated Multi-robot Planning
173

neighbor v
0
∈ V has to be found. To generate neig-
hbor nodes of already visited nodes MRdRRT uses
a technique called oracle. Without loss of generality
consider that G is embedded in [0, 1]
d
. For two points
v, v
0
∈ [0, 1]
d
the ρ (v, v
0
) denotes a ray that begins in
v and goes through v
0
. ∠
v
(v
0
, v
00
) given three points
v, v
0
, v
00
∈ [0, 1]
d
denotes the (smaller) angle between
ρ(v, v
0
) and ρ(v, v
00
). The way the oracle is used is
given sample point u it returns the neighbor v
0
of v
such that the angle between rays ρ(u, v
0
) and ρ(v, v
0
)
is minimized. This can be defined as
O
D
(v, u) := argmin
v
0
∈V
∠
v
u, v
0
|
v, v
0
∈ E
.
It is possible that the tree will if given sufficient
time, eventually reach t during the expansion phase.
However it is unlikely for larger problems. MRdRRT,
therefore, attempts to connect the newly added node
with t employing so-called local connector which is
successful for restricted problems only, but fast, so it
can be run often.
3.2 Proposed Improvements
Although the original MRdRRT can solve path-
finding problems for several robots, the realization of
its particular steps is inefficient, which disqualifies it
to deal with complex scenarios containing tens of ro-
bots. The authors of MRdRRT present experimen-
tal results with up to 10 robots and mention that their
algorithm is unable to solve problems with a signifi-
cantly larger number of robots. We, therefore, intro-
duce several improvements to the original version.
The original expansion phase generates random
samples from a bounding box of G which is ineffi-
cient in maps with tight spaces as it would not allow
robots to stand still as their next action and would not
find a solution in situations where standing still was
required for one of the robots. Moreover, the majo-
rity of generated points is far from a solution leading
to a relatively huge growth of the tree over the con-
figuration space and thus to the high computational
complexity of the algorithm. Instead of generating a
point from R
d
, we find shortest paths for every robot
separately in the preprocessing phase and after that
we compose a sample only from points q for which
dist(s
i
, q) + dist(q, t
i
) ≤ dist(s
i
,t
i
) + ∆, where dist is
a distance of two points, s
i
and t
i
are start and goal
positions of i-th robot, and ∆ > 0 is a defined constant
threshold.
The original oracle generates a sample and checks
it for collisions, which is inefficient as many samples
are discarded. Our version iterates over positions of
all robots v
i
and tries to generate a new step v
0
i
for each
of them towards the sample point u
i
while avoiding
collisions and also minimizing the angle (u
i
, v
i
, v
0
i
) by
keeping a list of collision configurations that need to
be avoided.
Another proposed improvement is the use of the
CARP algorithm (ter Mors et al., 2010) as a local con-
nector as well as a random shuffling of the order in
which CARP attempts to plan trajectories of indivi-
dual agents to their desired locations. This algorithm
creates a free time window graph on which agents find
the shortest paths one by one while updating the free
time window graph with their paths so that collisions
are avoided.
Algorithm 1: Improved MRdRRT algorithm.
1: T .init (s)
2: loop
3: EXPAND (T )
4: REW IRE (T , v
0
)
5: P ← CONNECT
TO TARGET (T , t)
6: if not empty(P) then return
RETRIEV E PATH (T , P )
The last set of modifications to the algorithm is the
addition of steps inspired by RRT* algorithm (Kara-
man and Frazzoli, 2010) which include the new re-
wiring step and modification of expansion step, see
Alg. 1. At the start of the algorithm, the tree is initia-
lized with the node that contains the initial configura-
tion of agents (line 1). The main loop of the algorithm
then starts with the newly modified expansion phase
(line 3). After a new node is added the rewiring step
is called (line 4) that attempts to revise the structure
of the tree to improve path length to the root. The al-
gorithm finally tries to connect the newly added node
with the goal configuration. If it succeeds the algo-
rithm returns the found path.
The change to the expansion phase, Alg. 2, con-
sists of connecting the new node v
0
to a node alre-
ady in the tree T that minimizes the distance traveled
from the initial configuration s. The additional step
of the expansion phase in the original RRT* consists
of checking nodes in the radius around the new node
v
0
for the best predecessor and then connecting v
0
to
it. However, in the multi-agent discrete scenario (Alg.
2) the computational requirements to perform a simi-
lar task are much higher because it would require to
run a local connector method on each node in the ra-
dius and then perform the distance to root check. The
expansion phase was thus modified so that it employs
nearest neighbor search instead of radius (line 2). The
key difference is that in the first step of expansion the
random sample u (line 1) is generated, but after that
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
174
the new node v
0
is not created from the nearest neig-
hbor of u. Instead, N nearest neighbors of u are ite-
rated over (lines 6-11) and a new node v
0
is generated
from each of them using the oracle O
D
, but not added
into the tree. Each v
0
is checked for the distance tra-
veled through the tree T towards the root s and only
a node that minimizes this distance is connected to its
corresponding predecessor.
Algorithm 2: Improved MRdRRT EXPAND(T , r).
1: u ← RANDOM SAMPLE ()
2: NNs ← getNearestNeighbours(u)
3: v
0
pred
= −1
4: d
best
= ∞
5: v
0
best
=
/
0
6: for c ∈ NNs do
7: v
0
← O
D
(c, u)
8: if l
T
(c) + δ (c, v
0
) < d
best
then
9: d
best
= l
T
(c) + δ (c, v
0
)
10: v
0
pred
= c
11: v
0
best
= v
0
12: T .add
vertex
v
0
best
13: T .add edge
v
0
pred
, v
0
best
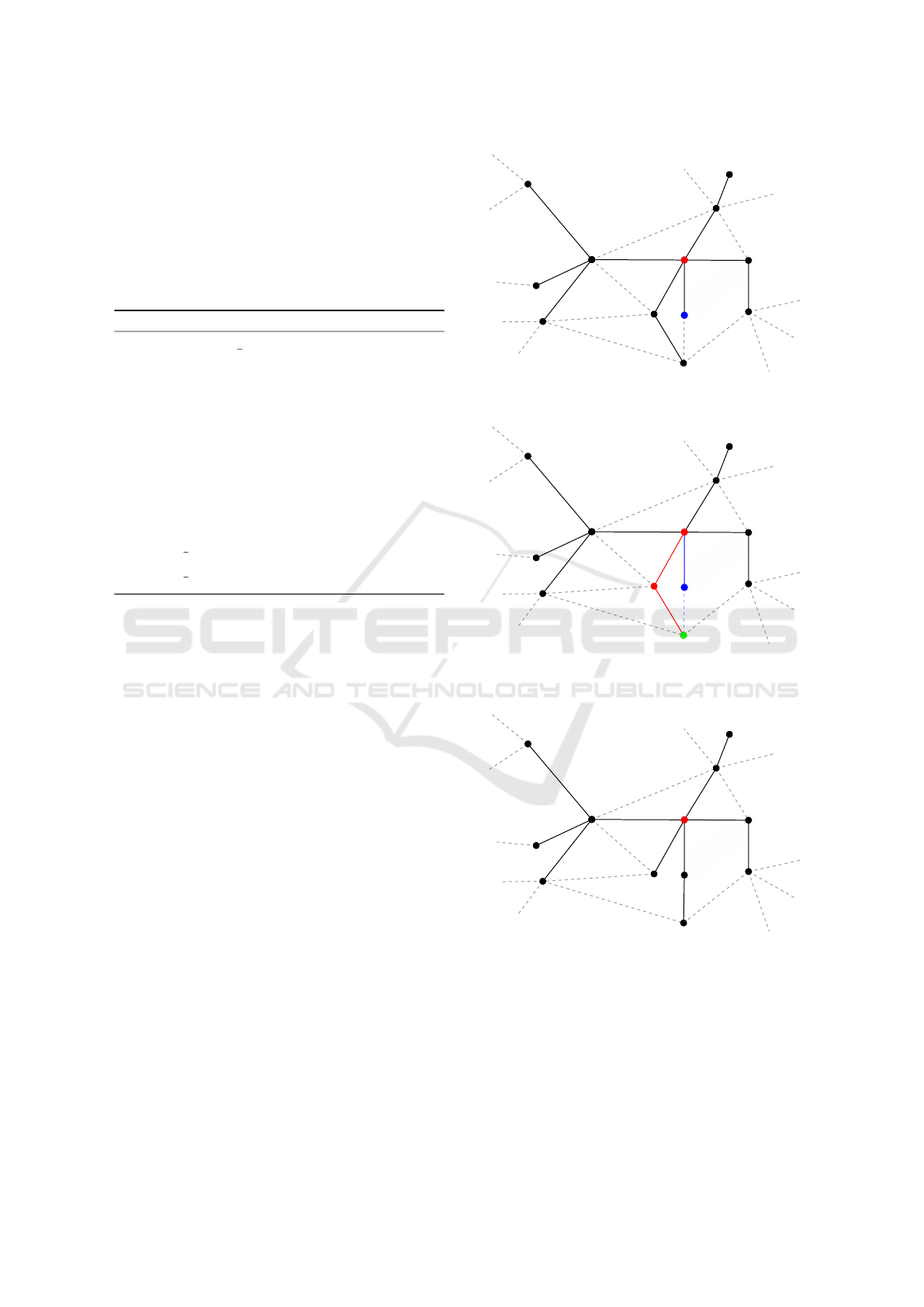
The rewiring step of RRT* locally revises a struc-
ture of T by checking whether nodes within the radius
r around a newly added node v
0
have the distance tra-
veled towards the root node shorter when they had v
0
as their predecessor. This step was modified for the
use in a multi-agent discrete case (Alg. 3) by omitting
the radius and iterating over N nearest neighbors of v
0
instead. Because these neighboring configurations c
might not be direct neighbors of v
0
in the composite
graph G, the local connector is used to obtain a path
between these two nodes (line 3). If the local connec-
tor fails to find the path, the neighbor is immediately
skipped (lines 4-5). In the case the local connectors
successes in finding a path p between v
0
and c it is
checked whether the length of the path from the root
to v
0
concatenated with the path p and the node c is
shorter than the distance traveled through T from the
root to c(lines 5-7). If it is shorter, then all nodes of
p are added to T . The first node of p is connected as
the successor of v
0
and the last node of p is chosen as
a new predecessor of c. An example of the rewiring
step is displayed in Fig. 2.
4 EXPERIMENTS
Performance of the proposed method has been evalu-
ated, and comparison with the CARP algorithm (ter
(a) Initial state of the tree. The root node is coloured red,
while the newly added node v
0
is coloured blue.
(b) The path through the newly added node v
0
(blue) to one
of its nearest neighbors (green) is shorter than the current
path to this node (red).
(c) The tree is revised.
Figure 2: Example of the rewiring procedure.
Mors et al., 2010) has been done. The experiments
were performed on two sets of artificially created
maps and assignments with the aim to compare the
quality of obtained results and runtime as well as the
reliability of both algorithms.
This first set of maps was created to demonstrate
how both algorithms perform depending on the den-
Improved Discrete RRT for Coordinated Multi-robot Planning
175
(a) Number of failed assignments
100 0 110 0 120 0 130 0 140 0 150 0
Num ber of edges in graph
0
20
40
60
80
100
# failed assignm ent s
CARP lim it 1
CARP lim it 1 0
CARP lim it 1 0 0
CARP lim it 1 0 0 0
dRRT
(b) Median number of plan steps
1000 1100 1200 1300 1400 1500
Num ber of edges in graph
35
40
45
50
55
Plan steps
CARP lim it 1
CARP lim it 1 0
CARP lim it 1 00
CARP lim it 1 000
dRRT
(c) Median iterations
1000 1100 1200 1300 1400 1500
Num ber of edges in graph
0
500
1000
1500
2000
It erat ions
CARP lim it 1
CARP lim it 10
CARP lim it 100
CARP lim it 1000
dRRT
(d) Median time to plan
1000 1100 1200 1300 1400 1500
Num ber of edges in graph
0
2000
4000
6000
8000
10000
Median t [m s]
CARP lim it 1
CARP lim it 10
CARP lim it 100
CARP lim it 1000
dRRT
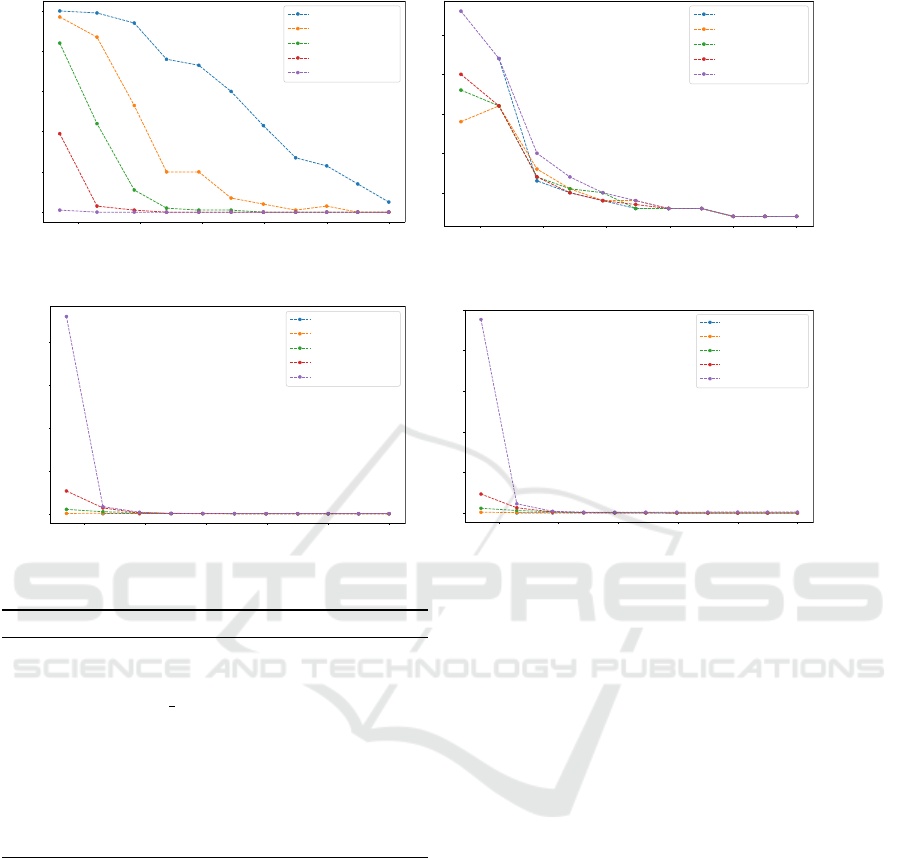
Figure 3: Comparison of the proposed approach (dRRT) with CARP.
Algorithm 3: REWIRE(T , v
0
).
1: NNs ← getNearestNeighbours(v
0
)
2: for c ∈ NNs do
3: p ← LOCAL CONNECT OR(v
0
, c)
4: if p ←
/
0 then
5: Continue
6: n ← LastNode (p)
7: if l
T
(v
0
) + l (p) +δ(n, c) < l
T
(c) then
8: T .add(p)
9: c.predecessor = n
sity of the given graph and the number of cycles in it.
The set was created by generating a random spanning
tree of a 20 × 20 grid map followed by the creation of
additional maps by iteratively adding a fixed number
of original edges into the spanning tree. The experi-
ments were thus carried out on the set consisting of
11 maps ranging from a spanning tree to the full grid.
Furthermore, 100 different assignments for a fleet of
100 robots were created by randomly sampling start
and goal nodes for each agent and each such assig-
nment was tested on all of these maps. The CARP
algorithm was tested by giving it the limit of 1, 10,
100, 1000 attempts to find a solution where the order
in which agents were planned was randomly shuffled
for each attempt.
The results of this experiment can be seen in
Fig. 3. The first thing to notice in Fig. 3a is that the
proposed approach shows a much higher success rate
even on the spanning tree, where it had its single fai-
lure. Contrary, CARP had 100% failure rate on the
spanning tree when given only 1 attempt and 39%
when given 1000 attempts. It can be seen in Fig. 3c
and Fig. 3d that once the number of edges in the graph
reaches 1090, the algorithms behave very similarly in
terms of runtime and the needed number of iterati-
ons to find the plan. The proposed method provides
a slightly higher median of a number of steps of the
resulting plan as can be seen in Fig. 3b. This can be at-
tributed to the fact that the median is calculated from a
higher number of successful plans compared to CARP
algorithm.
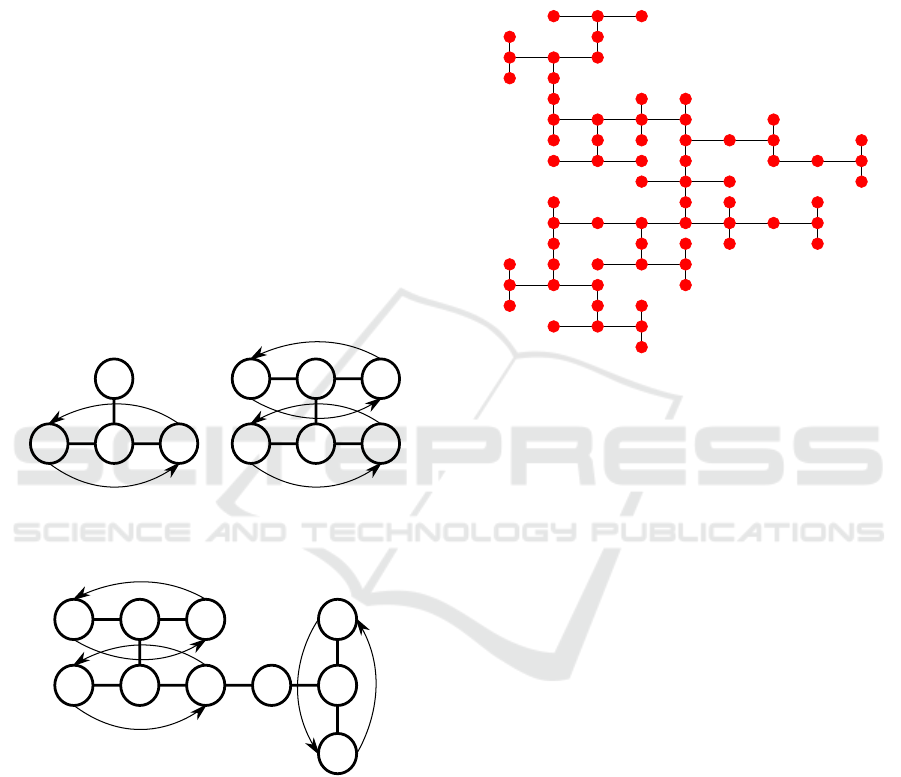
The second set of maps was created specifically
together with assignments so that the problems would
be impossible to solve for the CARP algorithm. The
maps and assignments were randomly generated by
the following process:
1. Create a basic problem that is impossible to solve
for the CARP algorithm depicted in Fig. 4a. Ar-
rows indicate the starting and goal positions of ro-
bots A and B on the graph. CARP fails because the
agents need to swap their positions while having
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
176
the same distance to the only node they can use
to avoid each other. Because CARP plans agents
sequentially one by one while ignoring the sub-
sequent agents, no ordering of these agents can
solve this issue.
2. Pick random node that has only one edge associa-
ted with it.
3. Either add 2 nodes A and B to either side of this
node if possible along with corresponding assign-
ment of 2 agents – The first agent going from A to
B and the second one from B to A. The example
of this step can be seen in Fig. 4b. The alternative
method to expand the map is to connect the same
structure to it as in the Step 1 together with the
same type of assignment, the example of which
can be seen in Fig. 4c.
4. Repeat Steps 2 and 3 until the map of a required
size is generated.
The example of a fully generated map following
the previous steps can be seen in Fig. 5.
A B
0
1
2
3
(a) Base problem.
A B
0
1
2
3
4
5
C
D
(b) First type of map
expansion
A B
0
1
2
3
4
5
C D
6
7
8
9
E
F
(c) Second type of map expansion
Figure 4: Map generation procedure.
The second set of experiments was carried out on
the second set of maps with the aim to illustrate the
behavior of the proposed algorithm on assignments
that CARP algorithm can not solve. The total of 400
different combinations of a map and assignment were
generated: 100 each for 10, 20, 30 and 40 agents.
The results of this experiment can be seen in Fig. 6.
The setup numbers 1 to 4 correspond to the number
of agents 10 to 40 respectively.
For up to 30 agents the success rate is 100% while
it is decreased to 95% for 40 robots. Regarding the
computational time results, the algorithm takes ap-
proximately 1 second to calculate the paths for each
agent in assignments that are impossible to solve for
CARP algorithm for up to 30 agents even with relati-
vely complicated assignments.
Figure 5: Example of a generated map.
5 CONCLUSION
In this paper, we presented a novel algorithm for coor-
dination of a fleet of robots on a graph. The algorithm
is based on a discrete version of RRT for multiple ro-
bots (MRdRRT), but it significantly improves particu-
lar steps of this algorithm which allows it to solve pro-
blems assuming tens of robots in few seconds. This is
in contrast to the original MRdRRT which can solve
problems up to ten robots in tens of seconds. The ex-
perimental comparison moreover shows that the pro-
posed approach can solve problems unsolvable for
CARP which is one of the best practical algorithms
nowadays. Finally, our approach is comparable to
CARP in computational time and quality of the ge-
nerated solutions for problems with up to 100 robots
which are solvable by CARP. The main drawback is
that the computational complexity with respect to the
number of robots is still exponential.
The ideas of RRT* showed promise in bringing
the obtained solution closer to optimum, but for the
cost of increased execution time. For this reason, the
future work should focus on improvement of the pro-
posed algorithm in terms of reducing the number of
required iterations to find the first solution. This could
be done for example by reducing the dimensionality
of the problem by planning smaller groups of agents
Improved Discrete RRT for Coordinated Multi-robot Planning
177
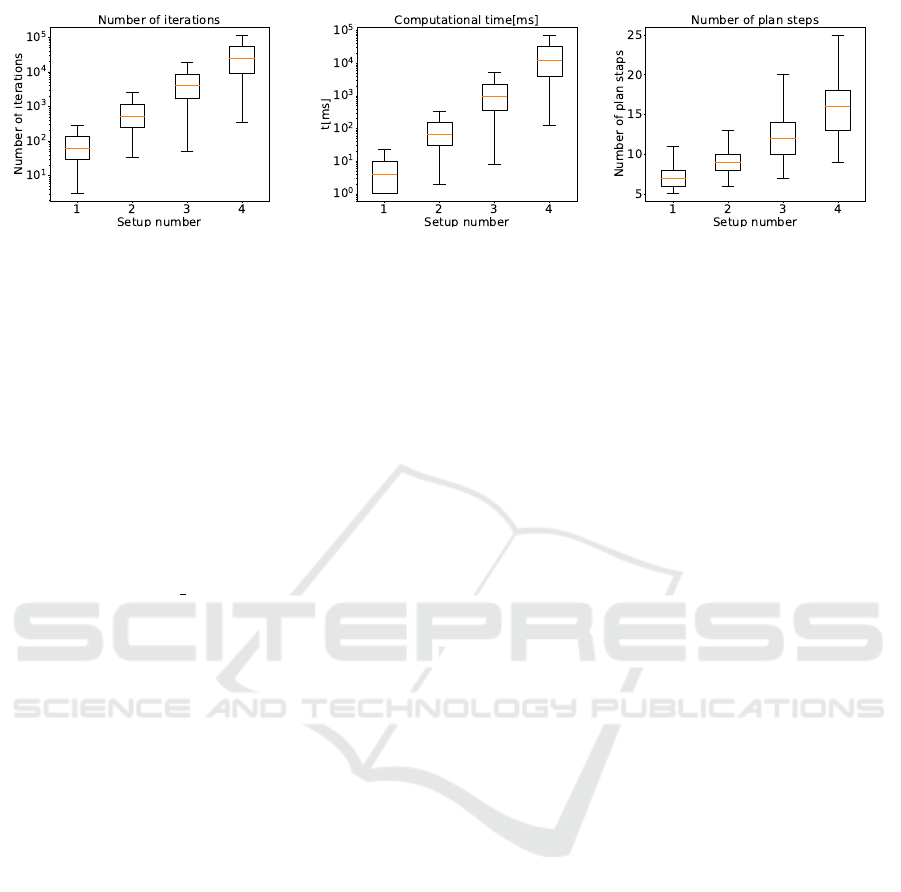
Figure 6: Results of the proposed approach on assignments which CARP is unable to solve.
in batches and then considering them as obsta-
cles moving in time for the subsequent groups.
ACKNOWLEDGEMENTS
This work has been supported by the European
Union’s Horizon 2020 research and innovation
programme under grant agreement No 688117,
by the Technology Agency of the Czech Repu-
blic under the project no. TE01020197 “Centre
for Applied Cybernetics”, the project Rob4Ind4.0
CZ.02.1.01/0.0/0.0/15 003/0000470 and the Euro-
pean Regional Development Fund. The work of Ja-
kub Hv
ˇ
ezda was also supported by the Grant Agency
of the Czech Technical University in Prague, grant
No. SGS18/206/OHK3/3T/37.
REFERENCES
Bennewitz, M., Burgard, W., and Thrun, S. (2001). Optimi-
zing schedules for prioritized path planning of multi-
robot systems. In Robotics and Automation, 2001.
Proceedings 2001 ICRA. IEEE International Confe-
rence on, pages 271 – 276 vol.1.
Cap, M., Novak, P., Kleiner, A., Selecky, M., and Pechou-
cek, M. (2015). Prioritized Planning Algorithms for
Trajectory Coordination of Multiple Mobile Robots.
IEEE Transactions on Automation Science and Engi-
neering, Special Is.
Chiew, K. (2010). Scheduling and routing of autonomous
moving objects on a mesh topology. Operational Re-
search, 12(3):385–397.
DeWilde, B., Ter Mors, A., and Witteveen, C. (2014). Push
and Rotate: A complete Multi-agent Pathfinding al-
gorithm. Journal of Artificial Intelligence Research,
51:443–492.
Dobson, A., Solovey, K., Shome, R., Halperin, D., and Be-
kris, K. E. (2017). Scalable asymptotically-optimal
multi-robot motion planning. In 2017 International
Symposium on Multi-Robot and Multi-Agent Systems
(MRS), pages 120–127.
Geramifard, A., Chubak, P., and Bulitko, V. (2006). Biased
Cost Pathfinding. In AAAI Conference on Artificial In-
telligence and Interactive Digital Entertainment, pa-
ges 112–114.
Goldreich, O. (2011). Finding the Shortest Move-Sequence
in the Graph-Generalized 15-Puzzle Is NP-Hard. In
Goldreich, O., editor, Studies in Complexity and Cryp-
tography. Miscellanea on the Interplay between Rand-
omness and Computation - In Collaboration with Li-
dor Avigad, Mihir Bellare, Zvika Brakerski, Shafi
Goldwasser, Shai Halevi, Tali Kaufman, Leonid Le-
vin, Noam Nisan, Dana Ron,, volume 6650 of Lecture
Notes in Computer Science, pages 1–5. Springer.
Hopcroft, J., Schwartz, J., and Sharir, M. (1984). On the
Complexity of Motion Planning for Multiple Indepen-
dent Objects; PSPACE- Hardness of the ”Warehouse-
man’s Problem”. The International Journal of Robo-
tics Research, 3(4):76–88.
Karaman, S. and Frazzoli, E. (2010). Incremental sampling-
based algorithms for optimal motion planning. CoRR,
abs/1005.0416.
Kiril Solovey, Oren Salzman, D. H. (2014). Finding a
needle in an exponential haystack: Discrete rrt for ex-
ploration of implicit roadmaps in multi-robot motion
planning. Algorithmic Foundations of Robotics XI, pa-
ges 591–607.
Latombe, J.-C. (1991). Robot Motion Planning. Kluwer
Academic Publishers, Norwell, MA, USA.
LaValle, S. and Hutchinson, S. (1998). Optimal motion
planning for multiple robots having independent go-
als. IEEE Transactions on Robotics and Automation,
14(6):912–925.
Lavalle, S. M. (1998). Rapidly-Exploring Random Trees: A
New Tool for Path Planning. Technical Report (Com-
puter Science Deptartment, Iowa State University),
11.
Luna, R. and Bekris, K. E. (2011). Efficient and com-
plete centralized multi-robot path planning. In 2011
IEEE/RSJ International Conference on Intelligent Ro-
bots and Systems, pages 3268–3275. IEEE.
Parker, L. E. (2009). Path Planning and Motion Coordina-
tion in Multiple Mobile Robot Teams. Encyclopedia
of Complexity and System Science.
Peasgood, M., Clark, C. M., and McPhee, J. (2008).
A Complete and Scalable Strategy for Coordinating
Multiple Robots Within Roadmaps. Robotics, IEEE
Transactions on, 24(2):283–292.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
178

Ryan, M. R. (2008). Exploiting Subgraph Structure in
Multi-Robot Path Planning. Journal of Artificial In-
telligence Research, pages 497–542.
Silver, D. (2005). Cooperative Pathfinding. In The 1st con-
ference on Artificial Intelligence and Interactive Digi-
tal Entertainment, pages 117–122.
Simeon, T., Leroy, S., and Lauumond, J.-P. (2002). Path
coordination for multiple mobile robots: a resolution-
complete algorithm. IEEE Transactions on Robotics
and Automation, 18(1):42–49.
ter Mors, A. W., Witteveen, C., Zutt, J., and Kuipers, F. A.
(2010). Context-aware route planning. In Dix, J.
and Witteveen, C., editors, Multiagent System Techno-
logies, pages 138–149, Berlin, Heidelberg. Springer
Berlin Heidelberg.
van den Berg, J. and Overmars, M. (2005). Prioritized mo-
tion planning for multiple robots. In 2005 IEEE/RSJ
International Conference on Intelligent Robots and
Systems, pages 430–435. IEEE.
van den Berg, J., Snoeyink, J., Lin, M. C., and Manocha, D.
(2009). Centralized path planning for multiple robots:
Optimal decoupling into sequential plans. In Trinkle,
J., Matsuoka, Y., and Castellanos, J. A., editors, Ro-
botics: Science and Systems V, University of Washing-
ton, Seattle, USA, June 28 - July 1, 2009. The {MIT}
Press.
Wang, K.-H. C. and Botea, A. (2008). Fast and Memory-
Efficient Multi-Agent Pathfinding. In ICAPS, pages
380–387.
Wang, W. and Goh, W. B. (2015). A stochastic algorithm
for makespan minimized multi-agent path planning in
discrete space. Applied Soft Computing, 30:287–304.
Improved Discrete RRT for Coordinated Multi-robot Planning
179
