
Speed Estimation for Control of an Unmanned Ground Vehicle using
Extremely Low Resolution Sensors
Iv
´
an del Pino, Miguel
´
A. Mu
˜
noz-Ba
˜
n
´
on, Miguel
´
A. Contreras, Sa
´
ul Cova-Rocamora,
Francisco A. Candelas and Fernando Torres
Group of Automation, Robotics and Computer Vision (AUROVA),
University of Alicante, San Vicente del Raspeig S/N, Alicante, Spain
Keywords:
Kalman Filter, SDKF, Speed Estimation, Speed Control, Incremental Rotary Encoder, Low-resolution,
Low-cost, Mobile Robotics.
Abstract:
In mobile robotics, the low-level control is a key component that translates the desires of the high-level system
into actual voltages and currents to drive the motors. PID controllers have been extensively used for speed con-
trol, but their performance depend heavily on the quality of the process variable (PV) estimation. In fact, noise
and outliers –if not properly filtered– might lead to system instability. In this work, we present a speed esti-
mation strategy that enables us to develop an inexpensive, accurate and easy-to-install speed control solution.
The proposed system relies on a Hall effect sensor and a Single-Dimensional Kalman Filter and its suitability
is demonstrated through a number of real experiments controlling the speed of an Unmanned Ground Vehi-
cle. We detail the design, implementation and validation processes and provide a GitHub repository with the
developed software and CAD designs.
1 INTRODUCTION
To achieve fully autonomous navigation, mobile
robots need to perform different tasks, such as local-
ization, path planning, and trajectory following (Sieg-
wart et al., 2011). In ground robotics, the final out-
put of the whole system is usually the desired driv-
ing and steering velocities to control car-like ma-
chines (De Luca et al., 1998), or specific velocities
for each wheel in differential drive robots (Indiveri
et al., 2007). In this way, a smooth, agile and reliable
low-level control is key for any application, since it
has the responsibility of translating the desires of the
high-level system into real voltages and currents to
drive the motors. PID controllers –and their variants–
are widely used in industrial processes (Jin and Liu,
2014) and are also common for speed control in au-
tonomous vehicles (Thrun et al., 2006; Park et al.,
2015), but they require a correct estimation of the pro-
cess variable (PV) to work properly. In the speed
control case, the PV is the linear velocity of a ve-
hicle and can be calculated from the rotation of the
traction axle. A well known method to estimate the
rotational velocity of an axle is the use of incremen-
tal rotary encoders attached to the motor (Borenstein
et al., 1997). This approach provides rich informa-
Figure 1: BLUE is a UGV designed to support research in
localization and autonomous navigation. Its low-level speed
control is based on a Hall effect and a Single-Dimensional
Kalman Filter.
tion because the encoder resolution gets multiplied by
an –usually high– reduction ratio, needed to generate
206
Pino, I., Muñoz-Bañón, M., Contreras, M., Cova-Rocamora, S., Candelas, F. and Torres, F.
Speed Estimation for Control of an Unmanned Ground Vehicle using Extremely Low Resolution Sensors.
DOI: 10.5220/0006867202060213
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 206-213
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reser ved

the torque required to move the vehicle at the desired
speed. Using this configuration it is possible to obtain
sub-millimeter linear displacement information using
low-cost hardware (Carnegie et al., 2004). However,
it is not always possible to have access to the motor
driving shaft and then the problem gets more com-
plicated. The present work is being developed in the
context of the BLUE project (roBot for Localization
in Unstructured Environments, see Fig.1). This robot
is adapted from a commercially available electric cart
and it results impossible –at reasonable costs– to in-
stall a high-resolution rotary encoder in the driving
shaft. Instead, the chosen alternative is to install a
collar with magnets in the traction axle using a Hall
effect sensor to measure the rotation. This approach is
robust, inexpensive and easy to implement, but the ob-
tained resolution is extremely low, in our case as low
as 24 pulses per revolution (one pulse every fifteen
degrees), which translates into a significant quantifi-
cation noise that is proportional to the sampling fre-
quency (Petrella et al., 2007). One common approach
to deal with noisy sensors is to use low-pass filters
(H
¨
agglund, 2012) but, despite being computationally
efficient, this approach makes the controller less sen-
sitive to changes. The proposed solution is to imple-
ment a single-dimensional Kalman filter (SDKF) us-
ing the controller output to feed the prediction stage of
the filter. The single-dimensional state vector makes
possible to lighten the computational load, avoiding
the matrix inversions required when more complex
dynamic models are used. Our architecture permits
to generate control signals at the desired rate while
the sensor can be queried with larger sampling times,
thus reducing the quantification noise. The present
work comprises the design, implementation and ex-
perimental validation of a low-cost speed control sys-
tem that overcomes its limitations thanks to the use
of a Single Dimensional Kalman Filter. It is open-
source, ROS-integrated and can be implemented with
a 3D printer, some magnets, a Hall effect sensor and
an Arduino. We provide a GitHub repository (AU-
ROVA, 2018) to make available the source codes and
the hardware designs.
The rest of this paper is structured as follows: in
section 2 we review different approaches for speed es-
timation using rotary encoders; section 3 is dedicated
to describe the robot used to test the control system;
section 4 details the proposed method; in section 5
we describe the experiments used to adjust the sys-
tem and to evaluate its performance; finally in section
6 we discuss the results and give some future works.
2 RELATED WORK
As indicated in (Petrella et al., 2007), algorithms that
use incremental rotary encoders to measure speed
can be roughly divided in direct methods and esti-
mation methods. In (Briz et al., 1994) two alterna-
tive direct methods are discussed: one of them counts
the number of encoder pulses in a sampling time,
while the other measures the period between con-
secutive encoder pulses with a high-frequency clock.
These approaches are simple but their performance
depends heavily on the magnitude of the rotational
velocity and present quantification and synchroniza-
tion problems. On the estimation side, Kalman filters
are frequently chosen since they have been success-
fully used in a wide variety of automatic control ap-
plications (Troncoso and Su
´
arez, 2017; Santamaria-
Navarro et al., 2017). Examples of speed estima-
tion using Kalman Filters and rotary encoders can be
seen in (Kim and Sul, 1996) where the authors use
a computationally intensive multi-dimensional dy-
namic model. In a more recent work (Shaowei and
Shanming, 2012) a single-dimensional Kalman fil-
ter is used for speed estimation with an optical en-
coder of 2500 lines, the authors use a constant veloc-
ity model adjusting the process noise Q dynamically
to take into account that the model is more accurate
at higher speeds. In our case, as we have much lower
resolution and lower velocities, we choose to model
the effect of the control signal in the system to im-
prove the Kalman Filter prediction step.
3 PLATFORM DESCRIPTION
Our research platform BLUE is based on a commer-
cial vehicle from Zallys, specifically the electric cart
Jespi Z105 (see Fig.1). This cart, which is designed
originally to be operated manually, has been modified
to run in an autonomous way.
The cart has a length of 1.60m, a distance between
axes of 1.05m, a width of 0.797m, and a weight about
140Kg including the batteries. The maximum pay-
load is about 600Kg, which can be transported on
slopes of up to 30 degrees. It is a four-wheeled ve-
hicle, with robust tires of 16 and 13 inches of diam-
eter for the traction and steering wheels respectively.
The traction wheels are moved by a differential trans-
mission and an electric DC motor of approximately
2.400W, which allows to reach a speed of up to 5Km/h
forward or backward. The traction system also in-
cludes a simple electric brake that ensures that the
vehicle remains immobile when it is stopped. The
steering wheels are operated like in usual cars, and
Speed Estimation for Control of an Unmanned Ground Vehicle using Extremely Low Resolution Sensors
207

Figure 2: Proposed control loop. It permits a high control rate based on the Kalman filter prediction while extending the pulse
integration time, thus reducing the Hall effect sensor quantification noise.
they allow a turning radius of 4m. Thus, this vehicle
fits very well with the Ackermann model. For BLUE,
we have replaced the original arm for manual driving
by a servomotor which allows to control the steering
wheels with precision. The power is provided by two
lead-acid batteries of 12V and 73Ah which provides
a powerful 24V supply and very high range. In addi-
tion, since the cart is intended for hard work, it is built
in steel and is very robust. We have also added a steel
platform bolted at the top of the chassis to facilitate
the installation and accommodation of the equipment
and possible loads.
4 PROPOSED APPROACH
A block diagram of the proposed control system can
be seen in Fig. 2. It shows two loops, each one oper-
ates at different rates: A fast Kalman prediction loop
that uses a dynamic model to relate the derivative of
the control signal with the system acceleration, and a
slower correction loop that uses the Hall effect sen-
sor. Moreover, the system is prepared to receive asyn-
chronous updates of the Kalman filter using a high-
level sensor fusion system through the ROS interface.
Next, we describe the more relevant elements of the
proposed system.
4.1 PID Control
Inspired by (Thrun et al., 2006) we choose a PID
structure to implement our speed controller. Our sys-
tem provides a ROS interface to adjust the parameters
–including the PID gains– dynamically from the on-
board computer using rosserial. All input and output
signals are published in ROS topics, what enables us
to use rosbags for off-line analysis. In our implemen-
tation, the controller set point can be adjusted using
either the ROS interface or by means of a remote con-
troller (DJI DT7). This RC can also be used to con-
trol directly the output voltage (bypassing the PID) to
study the differences between human and automated
control.
To ease the tuning process, the PID controller
works internally with normalized values, so a pro-
cess of saturation/scaling is applied to the inputs and
the output. To avoid unexpected behaviors, the inte-
gral term is also saturated when it reaches the maxi-
mum output value. The maximum and minimum val-
ues used for normalization are set in a specific header
file which describes the hardware components of the
robot. In that way, using the developed control sys-
tem in other robots, or changing some hardware com-
ponent, are straightforward steps.
As the micro-controller loop time may have slight
variations –depending on the interruptions– the ∆t
used for the computation of the integral and deriva-
tive terms is assumed variable and calculated at each
iteration. Finally, when the set-point is zero (within
a small tolerance) the output signal is set to zero and
the PID is reset.
4.2 Hall Effect Sensor
As stated before, it was not possible to install a rotary
encoder in the driving shaft of our traction motor, so
we decided to use a target with magnets attached to
the rear axle of the vehicle. To sense these magnets a
Hall effect proximity sensor was considered the best
option for our application for several reasons: they are
cost-effective, easy-to-use, and resistant to shocks, vi-
brations, extreme temperatures and moisture (Rams-
den, 2011).
A custom mounting bracket for the Hall effect
sensor and a split collar pulse wrap for holding the
magnets were designed using CAD software. They
were both 3D printed and attached to the metal sheet
and the rear axle respectively. The main challenge we
had to face in the design of the pulse wrap was the
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
208

limited space between the metal sheet and the driven
shaft of our robot. It was also intended that the piece
was formed by two identical parts so that they could
be easily replaced. Finally and after several iterations,
a collar of 84.50 mm in diameter and 20 mm in depth
was made. In each of its halves, there were housed six
circular magnets with 10 mm diameter. Thus, once
the piece was assembled in the vehicle we had a total
of 12 magnets, each one with a separation of 15 de-
grees. This angular resolution allows us to calculate
the minimum observable linear distance.
∆x
min
= ∆ω
D
2
=
πD
N
p
(1)
Where N
p
is the number of pulses per revolution,
and D is the diameter of the wheel
1
, in our case
∆x
min
≈ 0.05 m. On the other hand, the minimum ob-
servable speed, which constitutes our quantification
step, depends on sample time ∆t
s
as follows:
v
step
=
∆x
min
∆t
s
(2)
Our sensor gives measurements that are integer mul-
tiples (N) of the quantification step v
meas
= N × v
step
.
Finally, the number of steps M
q
depends directly on
sample time:
M
q
=
2v
max
v
step
=
2v
max
∆x
min
∆t
s
(3)
Where v
max
is the vehicle maximum speed. We ob-
serve in (3) that M
p
is proportional to ∆t
s
, therefore
the quantification noise is proportional to the sam-
pling frequency. With our extremely-low resolution
sensor of 24 pulses per revolution, using a refresh
time of just 100 ms we obtain a v
step
≈ 0.5 m/s. Tak-
ing into account that the maximum velocity of our
robot is about 5 Km/h or v
max
≈ 1.5 m/s, the quantifi-
cation noise results too high to use directly the sensor
measurements to implement the control algorithm, as
we will discuss in section 5.2.
Finally, as the rear axle of our vehicle is differ-
ential, the measured speed corresponds to one of the
wheels and depends on steering angle. We apply a
correction to compute the speed of a virtual center
wheel, to use the bicycle kinematic model, and name
it v
sensor
, because it will be the value used for the
Kalman Filter correction step.
v
sensor
= b
b −
c
2
tanθ
−1
v
meas
(4)
1
We obtain this value experimentally, comparing the
sensor measurements with the DGNSS ground truth, and
tuning the diameter value to obtain a zero mean error.
Figure 3: Assembly of a mounting bracket for the Hall ef-
fect sensor and the split collar pulse wrap attached to the
rear axle.
Where b is the wheelbase, c is the rear axle track
and θ is the steering angle of the virtual front wheel
of the bicycle model.
4.3 Single Dimensional Kalman Filter
It is well known that the Kalman filter is an optimal
estimator for linear systems under Gaussian uncer-
tainty (Andrade-Cetto, 2002). To analyze the present
problem we conducted a number of experiments, de-
tailed in the next section, that confirmed the system
linearity (see Fig.4) and the Gaussianity of the sensor
noise (see Fig.8). One drawback of the Kalman fil-
ter is the need of computing matrix inversions to esti-
mate multidimensional state vectors, this can prevent
the implementation of this kind of filters in microcon-
trollers that have limited processing power and need
to run complex programs that include communication
tasks and a great volume of interruptions for encoder
pulse counting. One option to reduce the computa-
tional burden when using a Kalman filter is to reduce
the system model to only one variable (Shaowei and
Shanming, 2012), using this approach the matrices
are reduced to scalars and matrix inversions become
just divisions.
4.3.1 Kalman Filter Equations
One way to write the general Kalman filter equations
is as follows:
Prediction step:
x ← Fx + Bu (5)
P ← FPF
T
+ Q (6)
Correction step:
z = y −Hx (7)
Speed Estimation for Control of an Unmanned Ground Vehicle using Extremely Low Resolution Sensors
209
Z = HPH
T
+ R (8)
K = PH
T
Z
−1
(9)
x ← x +Kz (10)
P ← P −KZK
T
(11)
Where ← represents a time update.
4.3.2 Proposed Model
Observing the linear relationship between voltage and
velocity (see Fig.4), and taking into account that we
have direct access to the control signal, we decided to
express the dynamic evolution of the system as a lin-
ear combination of the previous state and the deriva-
tive of the control input, as follows:
First, we assume that the acceleration is propor-
tional to the derivative of the control voltage. Ex-
pressing it in discrete time:
a = G
∆V
∆t
(12)
where G has units of
m
s
V
−1
Our state propagation equation results:
v ← v +G∆V (13)
Since the ∆t is canceled out when integrating the ac-
celeration to calculate the velocity increment.
Observing the presented equations is easy to derive
that:
F = 1 (14)
B = G∆t (15)
u = (V
k
−V
k−1
)/∆t (16)
Q = σ
2
model
(17)
H = 1 (18)
R = σ
2
sensor
(19)
Finally, we can rearrange the original equations
obtaining:
Prediction step:
v ← v +G∆V (20)
σ
2
v
← σ
2
v
+ σ
2
model
(21)
Correction step
2
:
z = v
sensor
− v (22)
σ
z
= σ
2
v
+ σ
2
sensor
(23)
k = σ
2
v
σ
−1
z
(24)
v ← v +kz (25)
σ
2
v
← σ
2
v
− σ
z
k
2
(26)
2
We make use of the predicted variance to reject outliers
by means of an innovation threshold, so we compute the
correction step only when |z| < 3σ
v
.
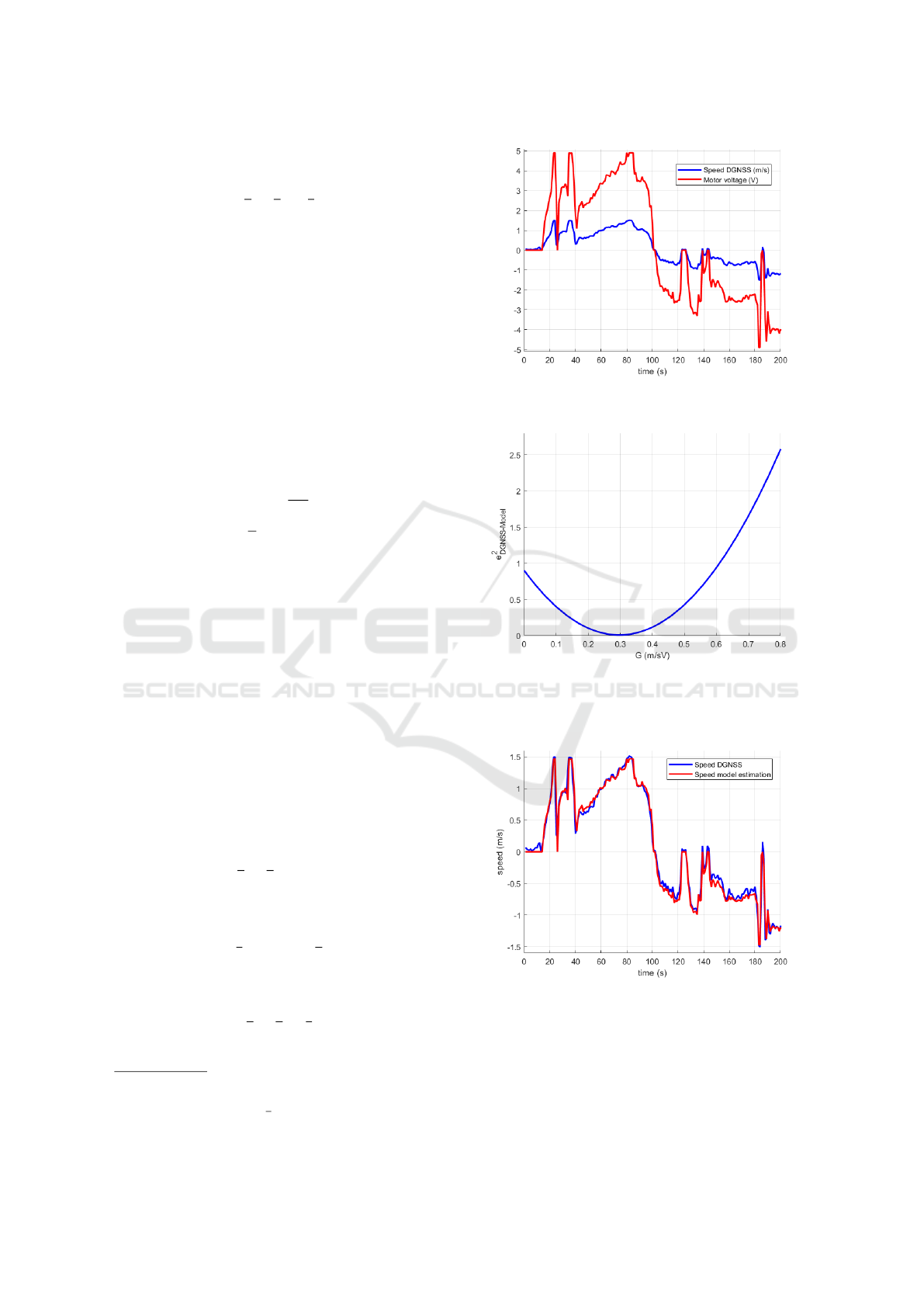
Figure 4: This figure illustrates the linear relationship be-
tween speed and motor voltage in flat terrain.
Figure 5: We want to find the value of G that minimizes
the mean squared error between the ground truth and the
dynamic model predictions. Using the dataset recorded in
flat terrain, we obtain an optimal gain of G
∗
= 0.3.
Figure 6: Training set: Comparison between speed pre-
diction using the proposed dynamic model tuned with the
optimal gain G
∗
, and speed measured by DGNSS (ground
truth). In flat terrain the linear relation between speed and
voltage is constant, for this reason, the prediction fits very
well the ground truth.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
210
5 EXPERIMENTAL RESULTS
In this section we describe the system adjustment and
algorithm validation in our research platform BLUE.
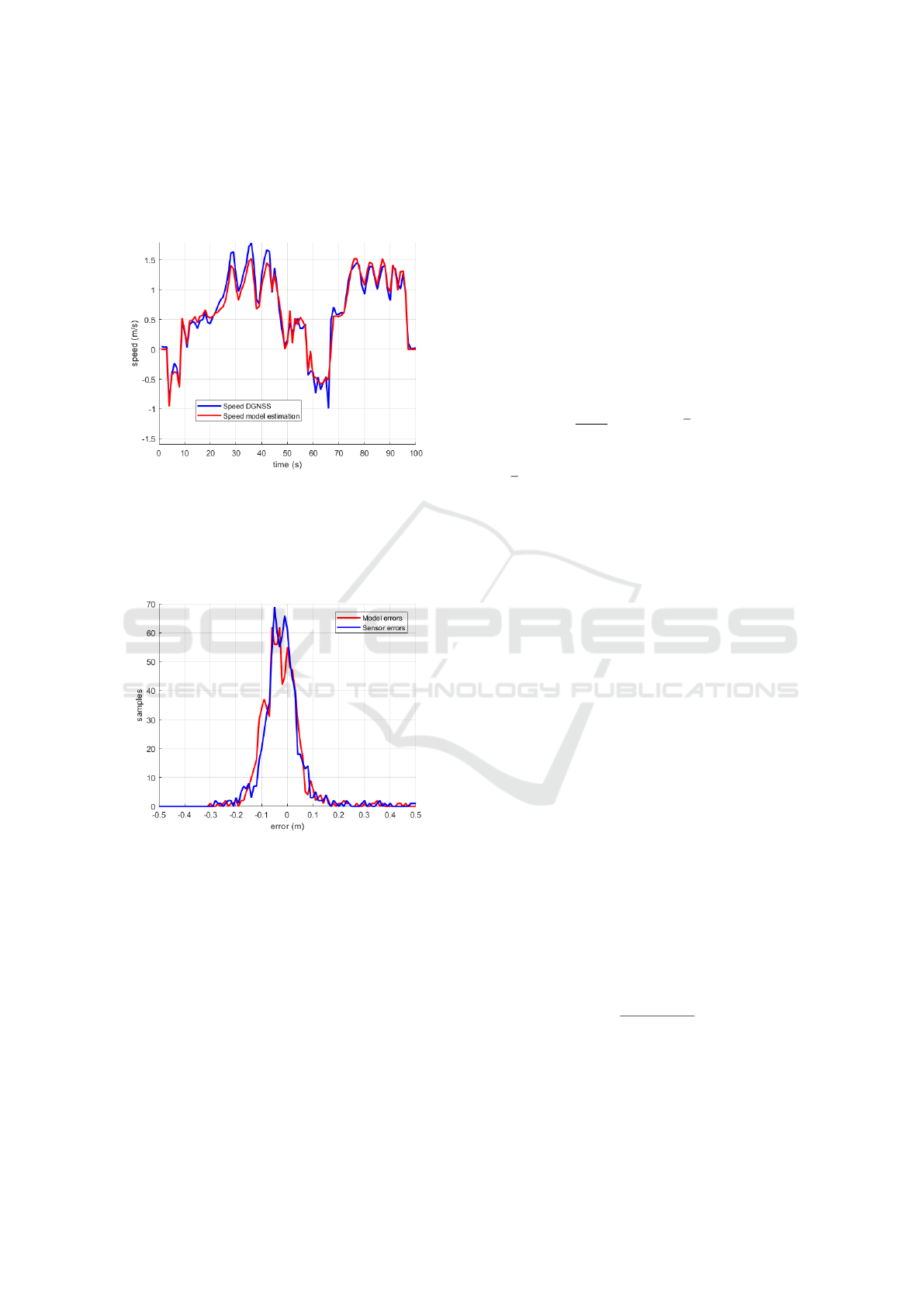
Figure 7: Testing set: Comparison between speed pre-
diction using the training set tuning and speed measured
by DGNSS in terrain with slopes. In the downhills (t =
(25,45)), motor needs less voltage, so the prediction does
not reach the ground truth speed. In the uphills (t =
(75,95)), motor needs more voltage, thus the model ex-
ceeds the ground truth speed.
Figure 8: Prediction and sensor error histograms with re-
spect to the DGNSS ground truth.
5.1 Dynamic Model Adjustment
To implement the SDKF in our proposed control loop,
we need to adjust the parameters G, R, and Q speci-
fied in the model (see section 4.3.2). To obtain these
parameters experimentally, we have configured our
vehicle without the PID and SDKF blocks shown in
Fig.2, acting directly on the motor through the con-
trol signal (V ) using a remote controller. With this
configuration, we recorded a dataset in free driving
across the campus of the University of Alicante. The
dataset contains: the control signal (V ) published at
10 Hz, the speed measured by the sensor hall (v
sensor
)
also published at 10 Hz, and the speed measured by
the DGNSS (v
GT
), published at 1 Hz, to be used
as ground truth. To analyze jointly the data, as the
publishing rates are different, the control signal is
down-sampled and the measured speed is integrated
to match the sensor output if it were queried one time
per second.
To tune our dynamic model, we define the optimal
gain G
∗
(see Fig.5) as the one that minimizes the mean
squared error between the ground truth and the state
propagation, without taking into account the sensor
observations:
G
∗
= arg min
G
1
n − 1
n
∑
i=1
(v
GT
i
− (v
i−1
+ G∆V ))
2
(27)
Where v
GT
is the speed measured by DGNSS.
And v is the speed estimated by the model. We cal-
culate this parameter using parts of the dataset that
corresponds to the path in flat terrain. Fig.6 shows an
example of the fit between the model and the ground
truth in flat terrain with the optimal G. On the other
hand, in terrain with slopes, as we show in Fig.7, the
estimated speed does not match the ground truth. In
this case, the constant G that relates the speed to the
voltage is different. These differences between the
model and the ground truth speed are reduced with
the Kalman correction using sensor hall observation.
In order to characterize the process and sensor
noise (see (28) and (29)), we obtained the estima-
tion and observation error histogram. As we show
in Fig.8, the errors obtained indicate uncertainty with
Gaussian probability distribution shape:
q ∼ N(µ
model
,σ
2
model
) (28)
r ∼ N(µ
sensor
,σ
2
sensor
) (29)
We observe in Fig.8 a slight bias in the errors that
can be produced because the batch of data is finite and
the statistics obtained rarely converge to probability
distribution model. We also need to consider that the
ground truth signal is a stochastic function. This in-
dicates that errors obtained are not produced only for
the uncertain of our model. But, in order to simplify
the noise characterization, we considered the DGNSS
speed estimation as a deterministic function.
e =
∑
n
|v
GT
− v|
n
(30)
Table 1 shows in a quantitative way the improve-
ments obtained with the use of SDKF solution with
respect to the sensors measurements and the model
predictions. The mean error was calculated using the
expression (30). The prediction error results greater
Speed Estimation for Control of an Unmanned Ground Vehicle using Extremely Low Resolution Sensors
211
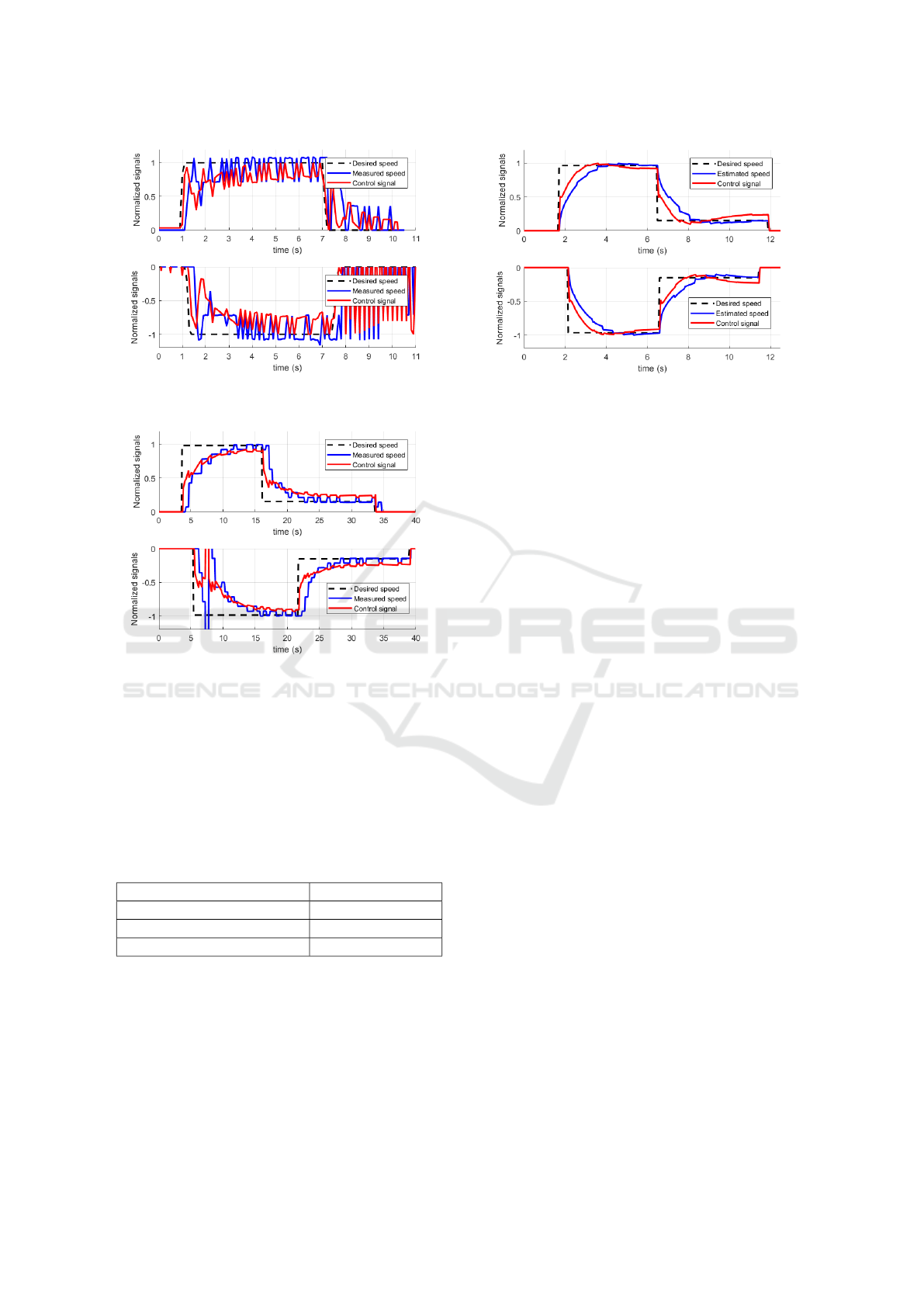
Figure 9: PID control using only the speed measured by the
sensor hall with f
sensor
= 10Hz. The noise makes impossi-
ble to control the speed of the vehicle.
Figure 10: PID control using only the speed measured by
sensor hall with f
sensor
= 2Hz. By increasing the sampling
time, we reduce the noise effect. But this makes the control
too slow for our application.
than the sensor error because the sensor is integrated
at 1 Hz to match the ground truth sampling rate. We
shown in 4.2 that the sensor noise grows linearly with
the frequency, so in a 10 Hz case, we could expect a
mean error of roughly 0.7 meters per second.
Table 1: Errors between velocities calculated with the ex-
periment performed and ground truth speed (DGNSS).
Estimation method @ 1Hz Mean error (m/s)
Sensor hall measurements 0.0677
Model prediction 0.0838
SDKF estimation 0.0585
5.2 PID Tunning Without SDKF
To illustrate the undesirable effect of the low-
resolution sensor noise, we tested the PID controller
without SDKF. The experiments were performed on
a car jack due to the risk of unstable control. We ad-
justed the PID gains in an empirical way, using a step
Figure 11: PID control using the SDFK speed estimation
with f
prediction
= 20 Hz and f
sensor
= 2 Hz. The system is
now free of undesirables oscillations and the control is fast
enough for our application.
function to fix the setpoint, both for positive and neg-
ative speeds.
As shown in Fig.9, we applied the PID control
with sample time T
loop
= T
sensor
= 0.1s. The high
measurement noise produced undesired oscillations
in the control signal. On the other hand, in the case
of the negative step function, when the desired speed
returns to 0, the control signal becomes clearly un-
stable. To reduce the amount of noise, we repeated
the same experiment with T
loop
= T
sensor
= 0.5s. As
shown in Fig.10 the system behavior is better, but too
slow for a good control. Moreover, we can observe
in Fig.10 down, around t = 7.5s, an outlier that pro-
duce an abrupt change in the control signal, this kind
of problem is overcome with the 3σ threshold when
using the SDFK.
5.3 PID Tunning using SDKF
Finally, we describe the tests using our full system
described in Fig.2. The closed loop frequency used
is f
loop
= 20Hz, and the observation is updated at
f
sensor
= 2Hz.
Firstly we adjusted the PID gains of BLUE over a
car jack to get a first approximation of the rigth val-
ues, taking into account that the value of G
∗
was com-
puted with the robot navigating in contact with the
ground. The noise characterization was the described
in subsection 5.1.
Once adjusted the gains, we performed several ex-
periments with BLUE over flat ground. The value of
G, in this case, was the optimal value G
∗
found using
the flat terrain dataset. When we applied the desired
step signals for the setpoint (positive and negative),
we obtained the results shown in Fig.11. We can see
that the estimated signal is now smooth, and there are
no outliers present. The control rate (20 Hz) and the
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
212

time to reach the desired speed (around 2 seconds),
now are suitable to control our vehicle.
6 CONCLUSIONS AND FUTURE
WORK
This paper presented a low cost speed control method
using extremely low resolution sensors under low-
speed conditions. Using a particularization of the
Kalman Filter (SDKF), we were able to increase the
sensor hall sampling time thus reducing considerably
the quantification noise while keeping the required
control rate. The proposed solution has been tested in
an Unmanned Ground Vehicle and compared against
a Differential GNSS system, showing that is suitable
to perform an effective speed control. We provide
the developed software and CAD designs through a
GitHub repository.
As future work, we plan to study the possibil-
ity of extending the proposed control method to ac-
celeration and jerk adding a PLL structure to obtain
smoother transients. Moreover, we want to evaluate
the speed control performance using a high-level sen-
sor fusion system to make asynchronous updates of
the Kalman filter.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish Gov-
erment through grant FPU15/04446 and the research
project DPI2015-68087-R.
REFERENCES
Andrade-Cetto, J. (2002). The kalman filter. Institut de
Rob
´
otica i Inform
´
atica Industrial, UPC-CSIC.
AUROVA (2018). Software and cad repository:
https://github.com/aurova-lab/clear.
Borenstein, J., Everett, H. R., Feng, L., and Wehe, D.
(1997). Mobile robot positioning-sensors and tech-
niques. Technical report, Naval Command Control
and Ocean Surveillance Center RDT and E Div. San
Diego CA.
Briz, F., Cancelas, J., and Diez, A. (1994). Speed mea-
surement using rotary encoders for high performance
ac drives. In Industrial Electronics, Control and In-
strumentation, 1994. IECON’94., 20th International
Conference on, volume 1, pages 538–542. IEEE.
Carnegie, D., Loughnane, D., and Hurd, S. (2004). The
design of a mobile autonomous robot for indoor se-
curity applications. Proceedings of the Institution of
Mechanical Engineers, Part B: Journal of Engineer-
ing Manufacture, 218(5):533–543.
De Luca, A., Oriolo, G., and Samson, C. (1998). Feed-
back control of a nonholonomic car-like robot. In
Robot motion planning and control, pages 171–253.
Springer.
H
¨
agglund, T. (2012). Signal filtering in pid control. IFAC
Proceedings Volumes, 45(3):1–10.
Indiveri, G., Nuchter, A., and Lingemann, K. (2007). High
speed differential drive mobile robot path following
control with bounded wheel speed commands. In
Robotics and Automation, 2007 IEEE International
Conference on, pages 2202–2207. IEEE.
Jin, Q. B. and Liu, Q. (2014). Imc-pid design based on
model matching approach and closed-loop shaping.
ISA transactions, 53(2):462–473.
Kim, H.-W. and Sul, S.-K. (1996). A new motor speed esti-
mator using kalman filter in low-speed range. IEEE
Transactions on Industrial Electronics, 43(4):498–
504.
Park, M., Lee, S., and Han, W. (2015). Development of
steering control system for autonomous vehicle using
geometry-based path tracking algorithm. ETRI Jour-
nal, 37(3):617–625.
Petrella, R., Tursini, M., Peretti, L., and Zigliotto, M.
(2007). Speed measurement algorithms for low-
resolution incremental encoder equipped drives: a
comparative analysis. In Electrical Machines and
Power Electronics, 2007. ACEMP’07. International
Aegean Conference on, pages 780–787. IEEE.
Ramsden, E. (2011). Hall-effect sensors: theory and appli-
cation. Elsevier.
Santamaria-Navarro, A., Loianno, G., Sol
`
a, J., Kumar, V.,
and Andrade-Cetto, J. (2017). Autonomous naviga-
tion of micro aerial vehicles using high-rate and low-
cost sensors. Autonomous Robots, pages 1–18.
Shaowei, W. and Shanming, W. (2012). Velocity and accel-
eration computations by single-dimensional kalman
filter with adaptive noise variance. Przegld Elek-
trotechniczny, (2), pages 283–287.
Siegwart, R., Nourbakhsh, I. R., and Scaramuzza, D.
(2011). Introduction to autonomous mobile robots.
MIT press.
Thrun, S., Montemerlo, M., Dahlkamp, H., Stavens, D.,
Aron, A., Diebel, J., Fong, P., Gale, J., Halpenny,
M., Hoffmann, G., et al. (2006). Stanley: The robot
that won the darpa grand challenge. Journal of field
Robotics, 23(9):661–692.
Troncoso, C. and Su
´
arez, A. (2017). Control del nivel
de pulpa en un circuito de flotaci
´
on utilizando una
estrategia de control predictivo. Revista Iberoamer-
icana de Autom
´
atica e Inform
´
atica Industrial RIAI,
14(3):234–245.
Speed Estimation for Control of an Unmanned Ground Vehicle using Extremely Low Resolution Sensors
213
