
A Comparative Study on the Performance of MOPSO and MOCS as
Auto-tuning Methods of PID Controllers for Robot Manipulators
Ahmed Zidan, Svenja Tappe and Tobias Ortmaier
Institute of Mechatronic Systems, Leibniz Universit
¨
at Hannover, 30167 Hanover, Germany
Keywords:
Robot Manipulators, Particle Swarm Optimization, Cuckoo Search, Multi-Objective Optimization, PID
Control, Automatic Tuning.
Abstract:
An auto-tuning method of PID controllers for robot manipulators using multi-objective optimization techni-
que is proposed. Two approaches are introduced based on the multi-objective particle swarm optimization
(MOPSO) and multi-objective cuckoo search (MOCS), respectively. The main goal of this work is to intro-
duce a comparative study on the performance of both algorithms with respects to their applicability to the
auto-tuning process. For this sake, necessary metrics are considered such as the hyperarea difference and the
overall Pareto spread, among others. In order to generate a sufficient amount of statistical data, a simula-
tion of the robot Puma 560 is implemented. Using a relatively accurate model of the robot dynamics, a PID
controller is applied and an optimization problem is configured. Two objective functions are defined, namely
the integral of absolute error and the variance of control action. In addition, two constraints are considered
regarding the maximal position error and maximal motor torque. After defining the optimization problem,
the two algorithms are implemented as auto-tuning methods of the controller gains. Execution of the tuning
process is repeated 30 times to test the statistical power of the obtained results. After that, an experiment on a
real robot is performed to gain an overview on the practical application of the proposed method. Finally, the
performance of both algorithms are compared and conclusions about the efficiency of each one are made.
1 INTRODUCTION
PID control structures provide simple, robust and ef-
fective solutions for most applications of control engi-
neering. They are with more than 95% share by far the
most used controller in industrial processes. These
good characteristics of PID controllers are conditio-
ned by accurate tuning of the controller gains. Howe-
ver, it was shown in (Desborough and Miller, 2002)
that up to 80% of twenty six thousand PID controllers
are not performing perfectly, one of the most impor-
tant reasons is the poor tuning of the controllers.
Robotic manipulators are highly non linear, highly
coupled, Multi-Input Multi-Output (MIMO) dynamic
systems, while PID controller has a linear structure,
and therefore, tuning the controller parameters for
such systems depending on analytical approaches is
a very difficult task.
In the last decades, optimization algorithms have
attracted the attention of researchers in many diffe-
rent fields. The increased development of these algo-
rithms enabled researchers to apply them on difficult
designing tasks where the previous knowledge of the
problem characteristics and the ability to analyze the
studied system are somehow limited.
In the field of robotic manipulators, a number
of optimization methods (e. g. Genetic Algorithms
(GA) (Kim et al., 2012), Particle Swarm Optimization
(PSO) (Zidan et al., 2017)) has been applied to auto-
tune the PID controllers. In the presence of a large
number of optimization algorithms, comparative stu-
dies are introduced to evaluate their performance and
emphasize their positive and negative aspects. Howe-
ver, only a limited number of comparative studies can
be related to the tuning problem of PID controllers
for robot manipulators. For example, genetic algo-
rithm (GA) is compared to simulated annealing (SA)
in (Kwok and Sheng, 1994) while performing a trajec-
tory tracking movement. Ga is found to be giving the
best tracking accuracy. In (Ouyang and Pano, 2015),
a comparison study of GA, PSO, and DE (Differen-
tial Evolution) is performed with respect to different
performance-measuring functions and it is concluded
that DE surpasses the other two algorithms.
New promising algorithms are increasingly deve-
loping, and therefore, the need for performing more
240
Zidan, A., Tappe, S. and Ortmaier, T.
A Comparative Study on the Performance of MOPSO and MOCS as Auto-tuning Methods of PID Controllers for Robot Manipulators.
DOI: 10.5220/0006899802400247
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 240-247
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tests on these algorithms and introducing comparative
studies between them increases as well. One of the
new and very successful algorithms is the cuckoo se-
arch (CS) proposed by (Yang and Deb, 2009), which,
to the author’s knowledge, has not been implemented
yet as an auto-tuning method for robot manipulators.
Regarding the problem at hand, the optimization
of the controller is affected by many factors, and des-
cribing it in the form of a single-objective optimi-
zation problem might be oversimplified and insuffi-
cient. For example in trajectory tracking control, the
main objective is to achieve the most possibly accu-
rate tracking, but this might be associated with relati-
vely high variance in the control action (joint torque)
or even with high oscillations in the motion. The-
refore, it is helpful to take more than one objective
function into consideration and handle the problem as
a multi-objective problem.
This consideration has already been introduced in
some works. (Ayala and dos Santos Coelho, 2012)
proposed an approach based on a multi-objective evo-
lutionary algorithm (MOEA), which aimed to tune
the PID controller gains by taking two conflicting ob-
jective functions into consideration: minimization of
position errors and minimization of the control sig-
nal variation (joint torques). Also in (Pierezan et al.,
2014), a comparative study between different multi-
objective optimization techniques has been introdu-
ced and an improved multi-objective particle swarm
optimization (I-MOPSO) has been proposed.
We introduced in a previous work (Zidan et al.,
2017) a practical auto-tuning method for a PD con-
troller using PSO algorithm, where the problem is
handled from a practical point of view and the pro-
blem of the necessary constraints is solved efficiently.
In this work, more attention is directed towards des-
cribing the problem from a multi-objective point of
view, and in the same time, implementing and compa-
ring the cuckoo search algorithm to the previously tes-
ted particle swarm optimization. In this comparison,
suitable metrics are considered in order to achieve
accurate results and reach helpful conclusions in order
to choose the best approach for similar applications.
The reminder of this paper is organized as follows.
In Section 2, the optimization problem with the ne-
cessary objective functions and constraints is defined,
while Section 3 introduces the CS and the MOCS al-
gorithms briefly. Section 4 introduces the PSO algo-
rithm and the chosen approach to form the MOPSO
algorithm. The metrics used for comparing the two
algorithms are introduced in Section 5. The experi-
mental results are presented in Section 6, firstly based
on a simulation where statistical data are generated,
and after that an experiment on a real robot is per-
formed and its results are shown. Finally, Section 7
discusses the conclusions of this work.
2 OPTIMIZATION OF PID
CONTROLLER FOR ROBOT
MANIPULATORS
This work considers a serial robot manipulator con-
trolled by an independent PID controller for every
joint of the robot. PID controller is a very desirable
choice because of its simplicity, efficiency and inde-
pendence of model knowledge. However, tuning the
controller gains for a complex nonlinear system such
as robot manipulator is not an easy task. The tuning is
done usually by using manual or experimental tuning
methods, which are unable to obtain critical damping
behavior and, therefore, settle for an overdamped one.
Recently after the rapid increase of computing power,
it became possible to use heuristic optimization met-
hods to solve the practical problems of such systems.
The auto-tuning process can be handled as an opti-
mization problem by defining one or more objective
functions representing the control design criteria, then
determining any necessary conditions regarding the
stability of the controller as the constraints of the op-
timization problem. Finally, the algorithm will work
as a searching mechanism and after a sufficient num-
ber of iterations, the best control parameters that meet
the design requirements will be found.
In this problem, it is desired to find the control
parameters that lead to the best accuracy in the trajec-
tory tracking of the robot. However, the gains should
not be too high in such a way that it could lead to very
high variations in the control action within small time
intervals, which increase the risk of damaging the ro-
bot actuators. Depending on these two requirements,
the optimization parameters are defined to be the PID
gains k
p
, k
d
and k
i
. The cost function that represents
the tracking accuracy is the integral of the absolute
error (IAE), which is calculated in practice using the
following formula:
IAE =
M
∑
i=1
|e
e
e(i)|∆T , (1)
and the cost function representing the control actions
variance (CAV ) is given by:
CAV =
M−1
∑
i=1
|τ
τ
τ(i + 1)− τ
τ
τ(i)|. (2)
Where ∆T is the sampling time, M is the total num-
ber of samples along the trajectory, e
e
e is the position
error signal and τ
τ
τ is the torque signal. Usually by the
A Comparative Study on the Performance of MOPSO and MOCS as Auto-tuning Methods of PID Controllers for Robot Manipulators
241
tuning procedure of the controller’s gains in robotic
manipulators, it is important to limit the gain values
in order to avoid driving the robot into unstable situ-
ations. This can be achieved by monitoring the robot
movement and stop it if one of these situations is de-
tected, such as high position error, high motor torque
or high excited oscillations.
In this work, the auto-tuning method is tested on
a simulation model of a robot and, additionally, on a
real robot. In the simulation case, the flexibility of
the joints and the links are neglected, therefore, it is
not necessary to detect oscillations in the movement.
However, when the auto-tuning is performed on real
robots, oscillations constraints are crucial and must be
considered. Handling oscillations has been done in a
previous work (Zidan et al., 2017) by defining an in-
dex that can detect unwanted oscillations and conse-
quently terminate the movement. In general, to detect
a constraint violations, maximum limits are defined
as thresholds of the constraints (a maximum position
error, a maximum torque and a maximum value of the
oscillation index). If one of these limits is exceeded,
the movement has to be stopped immediately.
Based on the foregoing, the optimization problem
can be defined as follows:
ˆ
K = (
ˆ
k
k
k
p
,
ˆ
k
k
k
d
,
ˆ
k
k
k
i
) = arg min
K
(IAE,CAV),
|τ
τ
τ| ≤ τ
τ
τ
max
, |e
e
e| ≤ e
e
e
max
, |h
h
h
osc
| ≤ h
h
h
osc,max
.
With h
h
h
osc
being a vector of the oscillation index va-
lues in the robot links, and h
h
h
osc,max
being a vector of
the maximum limits of index values corresponding to
the tolerance interval of oscillations.
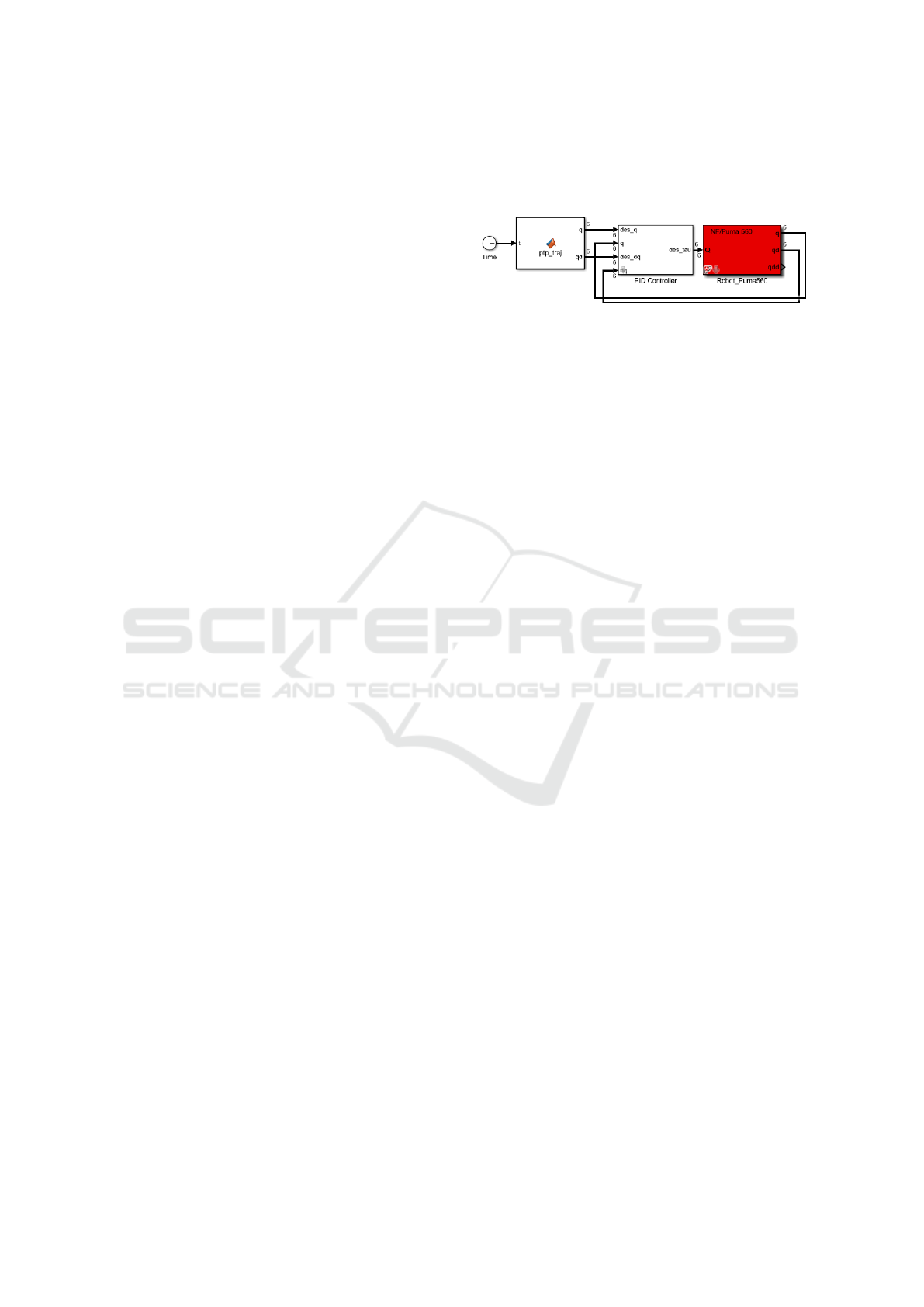
For the simulation case, a model of the robot Puma
560 is used to test the proposed method. This ro-
bot is built using the robotic toolbox designed by Pe-
ter Corke (Corke, 2017), which is a Matlab/Simulink
toolbox supplied with many functions that can be used
to model the kinematics and the dynamics of several
types of robots besides many other functions. By
using the built-in functions for Puma 560 dynamics,
one can add a PID position controller and use Simu-
link to simulate the movement of the robot as shown
in Figure 1 and finally evaluate the accuracy and the
efficiency of the movement. It is worth mentioning,
that the simulation is relatively simplified in compa-
rison to a real robot, where many other factors af-
fects the robot movement such as the flexibility of
the joints/links, measurements noise and unmodeled
friction. However, the main focus of this work is on
comparing the performance of the two optimization
algorithms which requires a sufficient number of exe-
cutions of the auto-tuning process in order to collect
enough statistical data. Getting these data from a real
robot would require letting the robot perform the de-
sired movement for thousands of times and, therefore,
would take a very long time.
Figure 1: Simulink model of Puma 560, PID controller and
a ptp trajectory generator.
3 CUCKOO SEARCH AND
MULTI-OBJECTIVE CUCKOO
SEARCH
Cuckoo search is an optimization algorithm first intro-
duced in (Yang and Deb, 2009). It imitates the brood
parasitism behavior of some cuckoo species. These
cuckoo birds lay their eggs in the nests of other birds,
by some species the eggs can take very close shape
to the host bird’s eggs, which makes it harder for the
host bird to detect the intruder egg. By the propo-
sed cuckoo search algorithm, the hosts nests are re-
presented as the population of the algorithm, where
the number of hosts will be fixed through the search.
The cuckoo birds are represented by the new indivi-
duals generated in every iteration. It is assumed that
every cuckoo bird lays only one egg at a time. The
new egg replaces the original egg in the host nest if
its evaluation (cost value) is better. In addition, there
is the possibility of the host nest to detect the intruder
egg and get rid of it (or abandoned the nest to another
location). This possibility is modeled by a probability
function which is the probability of detecting this egg.
This probability value pa ∈ [0 1] is actually the only
parameter which needs to be tuned in the algorithm.
In addition, CS algorithm uses a strong tool in ge-
nerating new eggs based on the concept of L
´
evy flig-
hts (Barthelemy et al., 2008), which is proven to be
more efficient than a random walk technique where
the individuals are generated randomly. The genera-
tion of new solutions is given as follows:
x
i
(t + 1) = x
i
(t) + α ⊕ L ´evy(β), (3)
where α depends on the difference between solution
qualities, the product ⊕ is an entry-wise multiplica-
tion, and L ´evy(β) is a function provides a random
walk while their random steps are drawn from a L´evy
distribution for large steps which has an infinite vari-
ance and large steps.
L ´evy ∼ u = t
−1−β
, (0 < β ≥ 2) . (4)
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
242

In (Yang and Deb, 2013), the single objective
CS algorithm is extended to handle optimization pro-
blems with multiple objectives. In order to achieve
that, the analogy to the cuckoo behavior is modified
in which every objective function is represented by
an egg in the nest, i.e. in k objectives problem, every
nest will have k eggs, and each egg has its own quality
(cost value). When a nest is abandoned by the proba-
bility pa, a nest with k eggs takes its place considering
the similarities between the eggs. This approach is the
one used in this work to perform the auto-tuning met-
hod.
4 PARTICLE SWARM
OPTIMIZATION AND
MULTI-OBJECTIVE PARTICLE
SWARM OPTIMIZATION
Particle swarm optimization (PSO), first introduced in
(Eberhart and Kennedy, 1995), is a population-based
algorithm simulating the movement of a swarm of
particles in a predefined search space. The number of
optimization parameters is the number of dimensions
of the search space. Every generation has a constant
number of particles, which move in the next generati-
ons in the search space until finding the position with
the best quality. The movement of the particles is de-
fined by the following equations:
V
j
(i + 1) = ω(i)V
j
(i) + c
1
γ
1
(P
j
(i) − X
j
(i))
+ c
2
γ
2
(G(i) − X
j
(i)),
(5)
X
j
(i + 1) = X
j
(i) + V
j
(i + 1).
(6)
Where i indicates the current iteration, j indicates
a particle of the swarm, X
j
(i) is the position vector
of the particle j, V
j
(i) is the velocity vector of the
particle j, c
1
and c
2
are the cognitive and the social
acceleration coefficients respectively, ω is the inertia
factor and γ
1
and γ
2
∈ [0 1] are random variables with
uniformly distributed values.
There is no standard way to choose the swarm size
and the maximum number of iterations. However,
both parameters must be high enough in order to gua-
rantee a convergence of the objective value towards
the global minimum.
The inertia weight is defined to be a linear decre-
ased function as follows:
ω = ω
max
−
(ω
max
− ω
min
)N
i
N
max
, (7)
where N
max
is the maximum number of iterations, N
i
is the current number of iterations, ω
max
and ω
min
are
the maximum and the minimum values of the inertia
weight respectively. The chosen values in this work
are ω
max
= 0.9 and ω
min
= 0.4, as it was suggested in
(Shi and Eberhart, 1998).
Regarding the case of multi-objectives, different
modification approaches are introduced as MOPSO
algorithms. In this work, the MOPSO algorithm de-
fined in (Coello et al., 2004) is applied where an ex-
ternal repository is used to store the non-dominated
solutions and an adaptive grid is constructed to pro-
duce well-distributed Pareto frontier.
5 EVALUATION OF PARETO
SOLUTIONS
Unlike single objective optimization algorithms,
multi-objective algorithms provide several optimal
solutions to the problem and offer some sort of com-
promise between the objective functions (assuming
that these functions contradict each other). Given
these solutions, the designer is supposed to evaluate
their goodness and choose one suitable to the problem
at hand.
In the case where the designer is trying to decide
between two or more optimization algorithm, diffe-
rent metrics from those of single objective problems
are required. In some cases, the designer can test the
algorithms on a similar problem for which the true Pa-
reto frontier is already known, and then perform the
comparison. For this case several metrics are intro-
duced in the literature as those in (Zitzler and Thiele,
1998). For cases such as the one in this work, the true
Pareto frontier can not be known in advance, and the-
refore, the known metrics need to be adjusted or even
new ones must be developed. The work of (Wu and
Azarm, 2001) has introduced several metrics for this
sake and are found to be very suitable for the auto-
tuning problem. These metrics are introduced briefly
with the corresponding formulas.
1. Hyperarea Difference: This metric is meant to
produce an estimation of the difference between
the area in objective space, which is dominated by
the true Pareto solutions (the actual Pareto front),
and the one dominated by the resulted Pareto so-
lutions (the Pareto front resulted from the optimi-
zation algorithm). This metric can be modified to
an equivalent one when the true Pareto solution
is unknown and different optimization algorithms
are compared. In this metric, it is sufficient to es-
timate the area dominated by the resulted Pareto
frontier (gray rectangles shown in Figure 2) and
then compare the areas between algorithms. The
A Comparative Study on the Performance of MOPSO and MOCS as Auto-tuning Methods of PID Controllers for Robot Manipulators
243

Figure 2: Example of a Pareto frontier and the dominated
region.
one with a bigger area has for sure smaller diffe-
rence hyperarea with the true Pareto frontier, and
therefore, generates better solutions.
(Wu and Azarm, 2001) proposed a general for-
mula to calculate the dominated region. In case
of only two objective functions, this formula can
be simplified to the calculation of the area of the
rectangles determined by the solutions. This area
is given as follows:
DA =
n−1
∑
i=1
(1 − f
1
(i))( f
2
(i + 1) − f
2
(i))+
(1 − f
1
(n))(1 − f
2
(n)),
(8)
with n being the total number of solutions and
f
j
(i) being the value of the jth objective function
with respect to the ith solution. The objective
functions are considered here to be normalized
and scaled to the interval [0 1].
2. Overall Pareto Spread: This metric estimates the
range, in which the Pareto solutions are spread.
The wider this range is, the more preferred the so-
lutions set is. This metric is calculated as follows:
OS =
m
∏
j=1
|max
n
i=1
( f
j
(i)) − min
n
i=1
( f
j
(i))|, (9)
with m being the total number of objective functi-
ons and n the total number of Pareto solutions.
3. Number of Distinct Solutions: Usually when
comparing two set of Pareto solutions, the one
with higher number of solutions is preferred. Ho-
wever, this criteria can be misleading in the case
where many solutions are too close to each ot-
her. This metric solve the problem by conside-
ring only the solutions that are sufficiently dis-
tinct from each other (separated by long enough
distance). It is simply calculated by setting a con-
stant number ε and counting the number of solu-
tions with a separating distance ≥ ε from other
solutions.
6 EXPERIMENTAL RESULTS
6.1 Performance Evaluation based on a
Robot Simulation
The proposed auto-tuning method is tested in a simu-
lation of a Puma 560 robot controlled by a classical
PID controller. For this sake, a point to point trajec-
tory is applied on the first three joints. The simula-
tion is executed using Simulink environment for the
time period 0 – 4 sec. At the end of execution, the
two objective functions are evaluated and these values
are sent to the corresponding optimization algorithm,
where the set of Pareto solutions are found. To gua-
rantee a fair comparison of the two algorithms, the
same number of population is set for both of them (40
individuals). In addition, the same maximum num-
ber of iterations is set before ending the search (100
iterations). The constraints are dealt with using the
sudden death method, where a very high value is as-
signed to the two objective functions once a high error
or high moment value is detected. Every algorithm
is applied to do the auto-tuning for 30 times. Then
the Pareto solutions and their corresponding gain va-
lues are collected for the comparison phase. To eva-
luate the performance of the two algorithms, the me-
trics introduced in Section 5 are used. The evaluation
requires first a normalization of the objective values,
which will give them always a value in the interval
[0 1]. This is achieved by defining a minimal and a
maximal limit of the objective values, which are de-
termined experimentally by applying 10 different set
of gain values, calculate the objective values of them,
and multiply the maximum value by a sufficient fac-
tor. The minimum value of both objectives is set to be
0, while the maximum values are IAE
max
= 2.5[rad ·s]
and CAV
max
= 1500[N · m]. The normalization is then
simply achieved by dividing the calculated objective
value to the corresponding maximum value.
At this point, the evaluation metrics can be calcu-
lated for every execution of the algorithms and later
compare the results.
The first metric is the number of Pareto solutions
found by each algorithm. As shown in Figure 3,
MOPSO gave clearly higher number of solutions by
all the executions. However, after determining the
number of distinct solutions with a limit ε = 0.01, the
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
244

Figure 3: Number of Pareto solutions in 30 executions.
Figure 4: Number of distinct solutions in 30 executions.
Figure 5: Dominated hyperareas in 30 executions.
superiority of MOPSO vanishes and MOCS takes the
advantage as shown in Figure 4. This indicates that
MOPSO generates solutions in a narrow range and
shows the importance of the second metric to avoid
the misleading results of the first.
Regarding the hyperarea difference, MOCS have
by all executions bigger dominating area as shown
in Figure 5 and, therefore, have lower hyperarea of
non-inferior solutions, which indicates that the Pareto
frontier of MOCS is closer to the true Pareto frontier
than MOPSO.
Another important metric is the overall Pareto
spread. Once again, MOCS has advantage in this me-
tric over MOPSO as shown in Figure 6.
The previous results indicate that despite the hig-
her number of MOPSO in general, those solutions are
concentrated in narrow region of the objective space.
However, MOCS gives more accurately distributed
solutions at the end and, therefore, wider range of so-
lutions for the designer to choose from.
Depending on the robot task and design require-
ments, one of the Pareto solutions can finally be cho-
sen and the corresponding set of gain values are used
Figure 6: Overall Pareto spread in 30 executions.
Figure 7: Best compromise solutions in 30 executions.
to tune the controller. Because of the conflict between
the two objectives, a compromise is needed here bet-
ween the accuracy and the controller variance. Assu-
ming that both objectives have the same importance,
an appropriate choice, which represents the best made
compromise, is the one with minimal average of ob-
jective values between all solutions
bcs = min(
IAE(P)+CAV (P)
2
). (10)
With P being the resulted set of Pareto solutions. Fi-
gure 7 shows the distribution of the best compromise
solutions for the 30 executions of the two algorithms.
MOCS generates clearly solutions with a lower bcs
values to prove again its superiority over MOPSO.
6.2 Performance Evaluation based on a
Real Robot
After comparing the two algorithms in a simulation of
the robot Puma 560, a more realistic test is done on a
real robot. The goal of this test is not to collect statisti-
cal data describing the behavior of the algorithms, but
to perform a realization of the auto-tuning method as
a practical process and take an overview on the perfor-
mance of the algorithms. For this sake, a 7-DOF ro-
bot is used to perform a trajectory tracking movement.
The robot is built of specially designed modules cal-
led PowerCube from the company “Schunk”. In this
experiment, PID controllers are used to control the
joints (3, 4, 6) which are shown in Figure 8. All the
joints here are rotational and actuated by brushless dc-
motors. The desired trajectories are shown in Figure
A Comparative Study on the Performance of MOPSO and MOCS as Auto-tuning Methods of PID Controllers for Robot Manipulators
245

Figure 8: PowerCube robot.
Figure 9: Desired trajectories of a circular movement.
9, which generate a circular movement of the end ef-
fector.
For a real robot, the maximum number of iterati-
ons by the optimization algorithms has to be more li-
mited compared to the simulation, otherwise the auto-
tuning process will take an extremely long time. The
population number and the maximum number of ite-
rations are set to be 10 and 20, respectively, i. e. a
total number of movement executions equals 200 for
every algorithm, which is much less than the 4000
executions used by the simulation. Performing the
200 movements takes about 1 hour, which is an accep-
Table 1: Performance evaluations of MOPSO and MOCS
after experiments on a real robot.
Performance measures MOPSO MOCS
Number of solutions 18 13
Number of distinct solutions 16 10
Dominated hyperarea 0.3641 0.3892
Overall Pareto spread 0.1763 0.1383
Best compromise solution 0.4543 0.4296
Figure 10: Pareto solutions of MOPSO and MOCS corre-
sponding to real robot movements.
table period of time. After looking at the results,
it was found that the difference in performance was
not as clear as in the test on a simulation. Figure
10 shows the Pareto solutions of both MOPSO and
MOCS, which appear to look relatively close to each
other. Table 1 gives the results of the performance
metrics for this test. The difference in the results is
too small to decide which is better. Therefore, based
on this experiment it is fare to say that both algorithms
did equally well.
6.3 Discussion
Based on the simulation results and statistics,
MOCS shows clearly better performance compared to
MOPSO. Adding to that the simplicity of MOCS and
low number of parameters which needs to be set (only
one parameter), one concludes that this algorithm is
very promising and worth to be considered as an auto-
tuning mechanism for PID controller even with such
complex systems as robot manipulators. On the other
hand, there is probably still a room for improvement
for MOPSO regarding the diversity of the determined
Pareto solutions, which despite its high count, are re-
latively concentrated in a narrow region of the Pareto
frontier.
However, performance evaluations after testing
the auto-tuning method on a real robot did not show
the superiority of MOCS as it was for the simula-
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
246

tion. This indicates that MOCS might need a rela-
tively high number of populations and executions in
order to achieve its best performance. On the other
hand, the high number of iterations in the simulation
test showed clearly the tendency of MOPSO to ge-
nerate solutions which are more concentrated in the
neighborhood of the leader particle (best global solu-
tion). This tendency was not emphasized as clearly in
the second experiment where only a limited number
of iterations is used.
7 CONCLUSION
In this work, an auto-tuning method of PID control-
lers for robot manipulators is introduced. Two multi-
objective optimization methods are considered, na-
mely MOCS and MOPSO. The main contribution of
this work is to compare the performance of the two
algorithms in the sense of achieving a good tracking
accuracy of a predefined trajectory without causing
a control action with high variations. The necessary
metrics for the comparison are considered and des-
cribed. Statistics taken from a simulation of the ro-
bot Puma 560 show clearly that MOCS is performing
much better than MOPSO with respect to all the con-
sidered metrics. The main advantage of MOCS co-
mes from the fact that its Pareto solutions have higher
spread and cover bigger region of the objective space
than the solutions of MOPSO. However, an experi-
ment on a real robot, where only a limited number of
iterations is used, showed that both algorithms perfor-
med equally well. This indicates that sufficiently high
number of populations and iterations might be neces-
sary for MOCS to achieve its best performance.
REFERENCES
Ayala, H. V. H. and dos Santos Coelho, L. (2012). Tuning of
pid controller based on a multiobjective genetic algo-
rithm applied to a robotic manipulator. Expert Systems
with Applications, 39(10):8968–8974.
Barthelemy, P., Bertolotti, J., and Wiersma, D. S. (2008). A
l
´
evy flight for light. Nature, 453(7194):495.
Coello, C. A. C., Pulido, G. T., and Lechuga, M. S. (2004).
Handling multiple objectives with particle swarm op-
timization. IEEE Transactions on evolutionary com-
putation, 8(3):256–279.
Corke, P. (2017). Robotics, Vision and Control: Funda-
mental Algorithms In MATLAB
R
Second, Completely
Revised, volume 118. Springer.
Desborough, L. and Miller, R. (2002). Increasing customer
value of industrial control performance monitoring-
honeywell’s experience. AIChE symposium series,
(326):169–189.
Eberhart, R. and Kennedy, J. (1995). A new optimizer using
particle swarm theory. Micro Machine and Human
Science, 1995. MHS’95., Proceedings of the Sixth In-
ternational Symposium on, pages 39–43.
Kim, E.-J., Seki, K., Iwasaki, M., and Lee, S.-H. (2012).
Ga-based practical auto-tuning technique for indus-
trial robot controller with system identification. IEEE
Journal of Industry Applications, 1(1):62–69.
Kwok, D. and Sheng, F. (1994). Genetic algorithm and si-
mulated annealing for optimal robot arm pid control.
Evolutionary Computation, 1994. IEEE World Con-
gress on Computational Intelligence., Proceedings of
the First IEEE Conference on, pages 707–713.
Ouyang, P. and Pano, V. (2015). Comparative study of de,
pso and ga for position domain pid controller tuning.
Algorithms, 8(3):697–711.
Pierezan, J., Ayala, H. H., da Cruz, L. F., Freire, R. Z., and
Coelho, L. d. S. (2014). Improved multiobjective par-
ticle swarm optimization for designing pid controllers
applied to robotic manipulator. Computational Intelli-
gence in Control and Automation (CICA), 2014 IEEE
Symposium on, pages 1–8.
Shi, Y. and Eberhart, R. C. (1998). Parameter selection
in particle swarm optimization. International Confe-
rence on Evolutionary Programming, pages 591–600.
Wu, J. and Azarm, S. (2001). Metrics for quality assessment
of a multiobjective design optimization solution set.
Journal of Mechanical Design, 123(1):18–25.
Yang, X.-S. and Deb, S. (2009). Cuckoo search via l
´
evy
flights. pages 210–214.
Yang, X.-S. and Deb, S. (2013). Multiobjective cuckoo se-
arch for design optimization. Computers & Operati-
ons Research, 40(6):1616–1624.
Zidan, A., Kotlarski, J., and Ortmaier, T. (2017). A practi-
cal approach for the auto-tuning of pd controllers for
robotic manipulators using particle swarm optimiza-
tion. 14th International Conference on Informatics in
Control, Automation and Robotics, pages 34–40.
Zitzler, E. and Thiele, L. (1998). Multiobjective optimiza-
tion using evolutionary algorithmsa comparative case
study. pages 292–301.
A Comparative Study on the Performance of MOPSO and MOCS as Auto-tuning Methods of PID Controllers for Robot Manipulators
247
