
Quadcopter Control Approaches and Performance Analysis
Vasco Brito
1,2
, Alexandre Brito
1
, Luis Brito Palma
1,2
and Paulo Gil
1,2,3
1
Universidade Nova de Lisboa-FCT-DEE, 2829-516 Caparica, Portugal
2
Uninova-CTS, 2829-516 Caparica, Portugal
3
Universidade de Coimbra-CISUC, 3030-290 Coimbra, Portugal
Keywords:
Quadcopter Drone, Kinematic and Dynamic Models, PID Controller, Sliding Mode Controller, Faults and
Failures.
Abstract:
This article presents the kinematic and dynamic model of a X8 quadcopter, as well as control methodologies
based on the PID controller and Sliding Mode Controller. The main contributions are centered on the control-
lers tuning based on particle swarm optimization algorithm and on the controllers performance comparison
for nominal operation and for faulty situations. In order to show the overall performance, simulation results
for trajectory and orientation tracking control are presented.
1 INTRODUCTION
All aerial vehicles need to sustain a means to maintain
its body aloft, for that purpose several kinds of vehi-
cles were invented to tackle elevation in a comple-
tely different manner, for example the air balloon uses
temperature to levitate, the air plane uses the pressure
on the wings to glide and the helicopter uses the thrus-
ting force of the propellers to hover.
From the various types of aerial vehicles menti-
oned before, this paper’s content will fit in the Ver-
tical Take-Off and Landing (VTOL) sort of aircraft.
The methodology for this aerial technology is quite
similar to the helicopter’s principle, in which both of
them hover by pushing the air downwards, (Luukko-
nen, 2011). The main difference relies on the number
of propellers and their respective placement and angle
allowing linear and angular movement, thereby gran-
ting them the same six degrees of freedom: North (x),
East (y), Down (z), Roll (φ), Pitch (θ) and Yaw (ψ).
In the world of Unmanned Aerial Vehicles (UAVs),
the quadcopter’s modelling and control are research
fields that have been particularly growing. The com-
mercial companies, military and even the tech com-
munity have been investing in these research fields,
(Merz and Kendoul, 2013). This piece of techno-
logy is currently used to facilitate tasks that are simple
enough for an unmanned drone to do, specially in the
entertainment, filming, surveillance and logistic sec-
tors (ie.:support on human rescue procedures, (TIME,
2015)). Although it looks simple to make a drone ho-
ver, move or even complete certain routes, it is not. It
has proven to be an extremely hard task to develop a
controller that could stabilize a quad-rotor during its
complex movements, since this system yields a very
fast dynamic behavior and is highly nonlinear.
A study of the most common controllers regarding
quacopter flight was done here. In this work, the most
used kinds of control approaches were implemented
(PID (Mustapa et al., 2014) (Leong et al., 2012), Sli-
ding Mode (Bouabdallah and Siegwart, 2005) (Yih,
2016)), and their behavior regarding faults/failures
were evaluated.
A fault is an inconsistency happening in a running
dynamical system that deviates its optimal functi-
oning status but could compromise it as a whole
(Blanke et al., 2006). A failure is a permanent in-
terruption of a system’s ability to perform a required
function under specified operating conditions (Iser-
mann and Ball
´
e, 1997). In this research, a fault tole-
rant control approach was implemented, allowing the
prevention of a global system failure.
These controllers were implemented and tested on
a quadcopter model with two rotors on each arm anti-
parallel to each other and rotating in opposite directi-
ons. This eight rotor, four armed architecture is desig-
nated X8 quadcopter and is illustrated in Fig. 1 and
Fig. 2. As it will be explained further in this paper,
the main purpose of this architecture is to allow the
drone’s model, that happens to suffer a fault/failure in
sensors or actuators, to keep flying and continue his
task. The X8 architecture does not bring efficiency
86
Brito, V., Brito, A., Palma, L. and Gil, P.
Quadcopter Control Approaches and Performance Analysis.
DOI: 10.5220/0006902600860093
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 86-93
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

battery wise but it does bring a lot more safety to
the aircraft’s structure, as well as acuators redundancy
(Brito et al., 2016).
2 MULTICOPTER’S MODEL
The quadcopter’s model, based on the real quadcop-
ter Fig. 1, and the techniques used to model its kine-
matics and dynamics will be briefly explained in this
section.
Figure 1: Quadcopter X8-VB.
Each rotors’ torque and orientation has to be taken
into account to allow the multicopter to hover, move
in three dimensions and rotate in the other three de-
grees of freedom.
U
1
=
8
∑
n=1
F
n
(1)
U
2
= f
4
+ f
8
− f
2
− f
6
(2)
U
3
= f
3
+ f
7
− f
1
− f
5
(3)
U
4
= f
1
+ f
3
+ f
6
+ f
8
− f
2
− f
4
− f
5
− f
7
(4)
Figure 2: Representation of the X8 quadcopter. The XYZ
axis and its rotations are represented with RGB colors, re-
spectively.
Equation (1) represents the sum of forces in all ro-
tors, attaining the variation of altitude (Z axis). The
equation (2) refers to the roll (φ) rotation and equa-
tion (3) the pitch (θ) rotation which enable the multi-
copter’s movement in the y and x axis, represented in
Fig. 2 as green and red, respectively. The last equation
(4) refers to the yaw (ψ) responsible for the rotation
around the Z axis, also represented in Fig. 2 as blue.
To obtain the dynamic model of this aircraft, one
must take into consideration its kinematics model, in
other words, its linear and angular position (5), as well
as its linear and angular velocity (6).
Γ =
h
P
E
Θ
E
i
T
= [x y z φ θ ψ]
T
(5)
v =
h
V
A
Ω
A
i
T
= [u v w
˙
φ
˙
θ
˙
ψ]
T
(6)
These equations represent the twelve states of the
system. Using the Newton-Euler method with the ki-
nematic model to describe the combined translation
and rotational dynamics of the quadcopter, therefore
obtaining its dynamic model represented by the sy-
stem of equations (7).
¨x =
sin(φ)sin(ψ) − cos(φ)cos(ψ)sin(θ)
U
1
−F
Dx
m
¨y =
cos(ψ)sin(φ) + cos(φ)sin(ψ)sin(θ)
U
1
−F
Dy
m
¨z = −g +
cos(φ)cos(θ)
U
1
−F
Dz
m
¨
φ =
1
I
xx
(I
yy
− I
zz
)
˙
θ
˙
ψ − J
t
˙
θω +U
2
¨
θ =
1
I
yy
(I
zz
− I
xx
)
˙
φ
˙
ψ − J
t
˙
φω +U
3
¨
ψ =
1
I
zz
(I
xx
− I
yy
)
˙
φ
˙
θ +U
4
(7)
In the set of equations (7), g is the gravity accele-
ration, m is its mass, I
xx
, I
yy
and I
zz
represent the body
inertia in three dimensions, J
t
is the rotor inertia, ω
is the rotor rotation and, F
Dx
, F
Dy
and F
Dz
(8) are the
drag forces imposed, contrary to its movement.
F
D
= C
ρv
2
2
A (8)
In equation (8), C refers to the drag coefficient, ρ
the air density, A the impact area with air and v is the
speed.
The system of equations (7) obtained represents
the linear and angular accelerations of the quadcop-
ter and its position and velocity equations can be at-
tained by means of integration (7). For a better un-
derstanding, the ¨x and ¨y accelerations are always de-
pendent on the roll (φ) and pitch (θ) but the yaw (ψ)
makes its appearance if the quadcopter’s referential
in relation to the earth axis is changed rotation wise.
Quadcopter Control Approaches and Performance Analysis
87
In the ¨z acceleration the yaw (ψ) does not influence
in any way and the constant acceleration of gravity is
introduced. The last part of ¨x, ¨y and ¨z equations re-
fers to the mass m of the drone, control input U
1
and
their respective drag forces. The angular accelerati-
ons are influenced by the drone’s inertial momentum
(I
xx
, I
yy
, I
zz
and J
t
) as well as its control inputs (U
2
,
U
3
and U
4
).
3 CONTROL APPROACHES
This section will further explain the controllers’ ap-
proaches and algorithms.
3.1 PID Controller
The Proportional-Integral-derivative controller (PID
Controller) is a very common solution in feedback
control of industrial processes that is meant to force
the process variable to follow the reference taking in
consideration its present (P), past (I) and future (D)
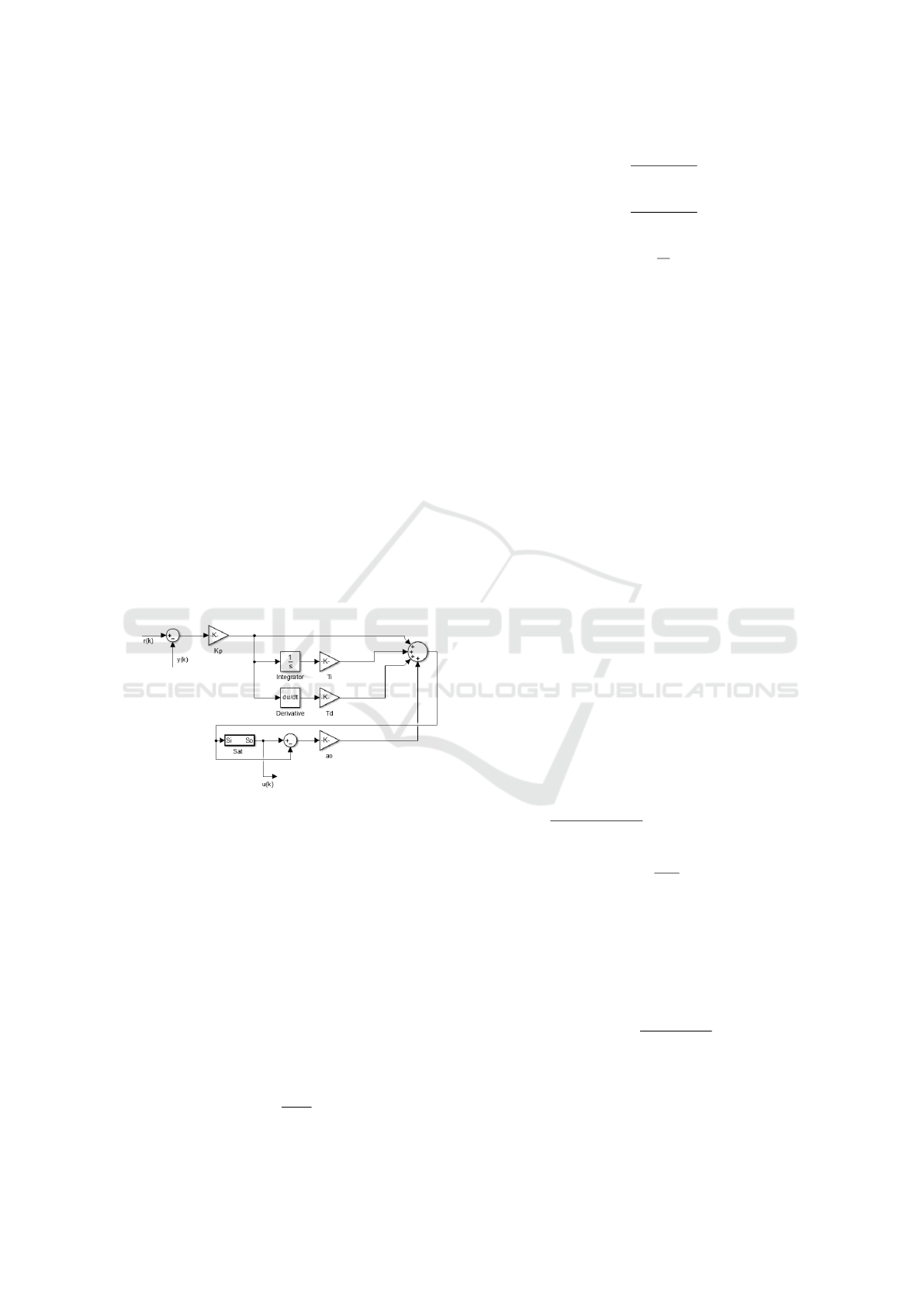
of the error, (Astrom, 1995). The implemented con-
troller’s architecture is represented in Fig. 3, where it
was added an anti-windup term in order to nullify the
integral element’s error accumulation.
Figure 3: PID with anti-windup architecture (continuous-
time).
The implemented PID discrete-time algorithm fol-
lows the equations (9) to (18), where e(k) represents
the control error between the reference r(k) and the
sensor data y(k), bi is the integral gain, ad and bd
are derivative gains, ao is the anti-windup gain, K
p
is the proportional gain, T
s
is the sampling time, T
i
is the integral coefficient, T
d
is the derivative coef-
ficient, T
t
is the anti-windup coefficient, P(k), I(k)
and D(k) are the PID controller gains, v(k) is the non-
saturated control actuation and u(k) is the control ac-
tuation with saturation.
e(k) = r(k) − y(k ) (9)
bi =
K
p
T
s
T
i
(10)
ad =
2T
d
− N T
s
2T
d
+ N T
s
(11)
bd =
2K
p
N T
s
2T
d
+ N T
s
(12)
ao =
T
s
T
t
(13)
P(k) = K
p
e(k) (14)
D(k) = ad D(k − 1)− bd
y(k) − y(k − 1)
(15)
v(k) = P(k) + I(k − 1) + D(k) (16)
u(k) = sat
v(k), ulow, uhigh
(17)
I(k) = I(k − 1) + bi e(k) + ao
u(k) − v(k)
(18)
3.2 Sliding Mode Controller
A Sliding Mode Controller (SMC) is a type of control
that consists in the change of the system state using
a switching function. This technique is very efficient
when dealing with nonlinear systems that can be af-
fected by external disturbances, like aircrafts, (Sh-
tessel et al., 2014), (Spurgeon, 2014), (Utkin et al.,
1999). The controller approach implemented is furt-
her described by the architecture in Fig. 4 and the im-
plemented discrete-time algorithm is defined by the
set of equations (19) to (25), (Palma et al., 2015).
e(k) = r(k) − y(k ) (19)
d
e
(k) = g
e
e(k) − e(k − 1)
T
s
+ p
c
d
e
(k − 1) (20)
g
aw
=
T
s
λ
c
(21)
i
e
(k) = i
e
(k −1)+T
s
e(k)+g
aw
u(k −1)−v(k −1)
(22)
σ
c
(k) = c
e
(k) + λ i
e
(k) + d
e
(k) (23)
v(k) = ρ
c
σ
c
(k)
|σ
c
(k)| + ε
c
(24)
u(k) = sat
v(k), [0; 1]
(25)
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
88
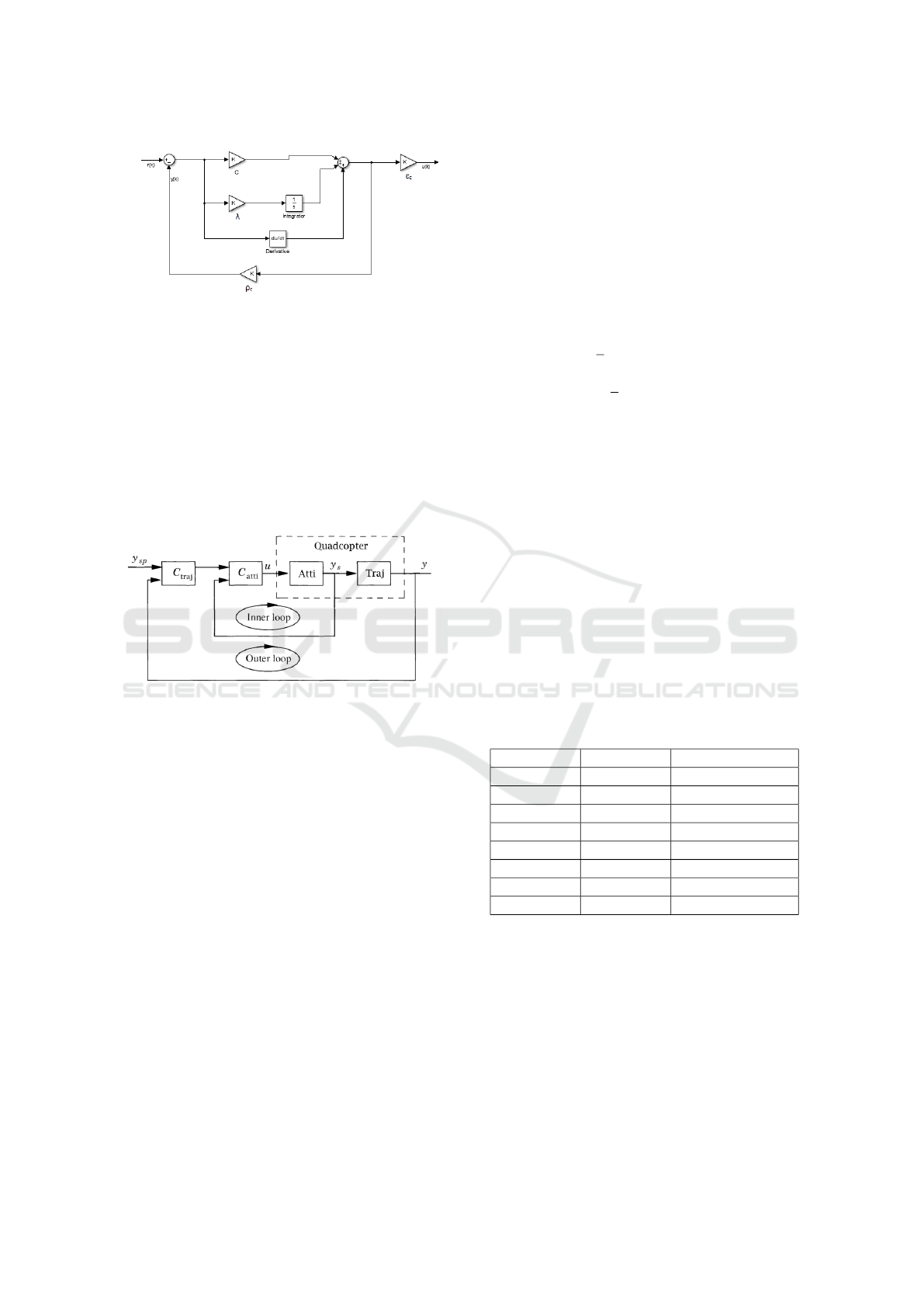
Figure 4: Sliding Mode Controller architecture
(continuous-time).
3.3 Cascade Control
In Fig. 5 the cascade control methodology to move
the quadcopter along the XY plane is illustrated. The
quadcopter will follow the trajectory y
sp
while com-
paring with the current y in the outer loop, by giving
the setpoint to the attitude controller which will fol-
low the desired orientation in the inner loop. The roll
and pitch orientations (inner loop) will affect the mo-
vement in the Y and X axis (outer loop), respectively.
Figure 5: Cascade control for XY plane trajectory.
3.4 Particle Swarm Optimization
The controllers mentioned above were optimized
using the Particle Swarm Optimization (PSO) algo-
rithm, (Palma et al., 2015). This method minimizes
the cost function by optimizing the control parame-
ters, (Kennedy and Eberhart, 1995). The advantage
being that it is not largely affected by the size and
non-linearity of the system, while converging to opti-
mal or sub-optimal solutions where most analythical
methods fail to converge, (Del Valle et al., 2008).
The particles’ respective position p
i
(k) and speed
s
i
(k) on a controller’s parameter space are updated
through equations (26) and (27), (Kennedy and Eber-
hart, 1995), where w, c
1
and c
2
are real value parame-
ters, o
i
(k) and o
g
are the location of the best position
of the particle i (history) and the best position found
by any particle, respectively. k is the current sample
and rand(.) represents a random value in the range
[0;1].
p
i
(k) = p
i
(k − 1) + s
i
(k) (26)
s
i
(k) = w s
i
(k − 1)+
+c
1
rand(.)
o
i
(k − 1) − p
i
(k − 1)
+
+c
2
rand(.)
o
g
(k − 1) − p
i
(k − 1)
(27)
In this work, the cost function J
c
(k) to be minimi-
zed is defined by equation (28), where (k − n + 1 : k)
represents the set of samples of the active control in
a sliding window, mse and var are the control mean-
squared error and the control variance, respectively.
J
c
(k) =
1
2
mse
e(k − n + 1 : k)
+
+
1
2
var
u(k − n + 1 : k)
(28)
4 FAULTS AND FAILURES
In this paper, an additive sensor fault was implemen-
ted as well as a failure in motor 1, and thereafter the
controllers behavior was tested in order to evaluate
their robustness.
The actuators failures and its countermeasures
could be determined using equations (1, 2, 3 and 4).
It is important to note that the system is able to to-
lerate these failures because of the X8 architecture’s
fault/failure tolerant proprieties.
Taking into account the studies in (Brito et al.,
2016) one can obtain the Table 1 regarding the actua-
tors faults and the action to take in each case, (Brito,
2016).
Table 1: Motor failure and reconfiguration.
Failure Recon f . Control Retuning
Motor 1 Motor 7 Pitch, Yaw
Motor 2 Motor 8 Roll, Yaw
Motor 3 Motor 5 Pitch, Yaw
Motor 4 Motor 6 Roll, Yaw
Motors 1, 3 Motors 2, 4 Pitch, Roll, Yaw
Motors 2, 4 Motors 1, 3 Pitch, Roll, Yaw
Motors 5, 7 Motors 6, 8 Pitch, Roll, Yaw
Motors 6, 8 Motors 5, 7 Pitch, Roll, Yaw
In Table (1), the reconfiguration column shows the
rotor(s) to disable in case of the failure in the first co-
lumn rotor. The third column regards the controllers
that need to be adjusted according to each new actua-
tors configuration.
5 SIMULATION RESULTS
The simulation results showing the controllers’ beha-
vior will be presented in this section, and so will be
Quadcopter Control Approaches and Performance Analysis
89
their respective gains. The sampling period used in
the simulations was 0.1 s. Part of the position and
orientation variables are normalized between [-1, 1]
and others are between [0, 1].
5.1 Controller’s Optimization based on
PSO
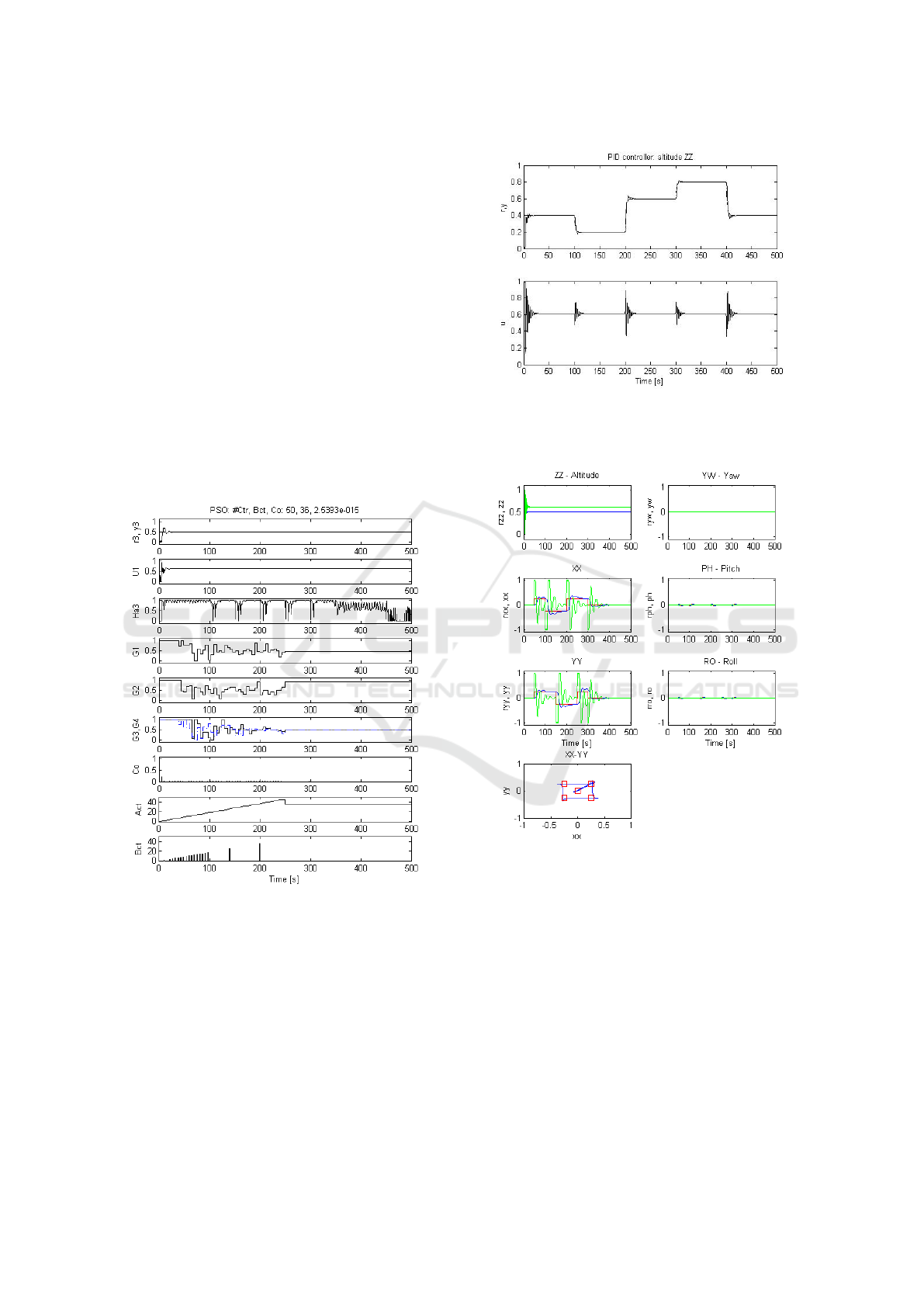
Fig. 6 illustrates the PSO algorithm’s iterations to op-
timize the gains of a controller. From top to bottom
can be observed the altitude(y3) and its reference(r3),
U1 is the control action, Ha3 is the Harris index
(Brito Palma et al., 2013), G1, G2, G3 and G4 are the
gains associated with the controller, Co is the value
of the cost function, Act is the active controller and
Bct is the best controller found at the moment. Fig. 6
presents the PSO algorithm for the sliding mode con-
troller, in which, from 50 controllers the 36th was the
best, presenting a cost function value of 2.5393e+15.
Figure 6: PSO algorithm for the sliding mode controller.
5.2 PID Controller
The PID gains obtained from the PSO optimiza-
tion process around a setpoint of 0.5 were: K
p
=
2.7272, T
i
= 4.224 and T
d
= 1.0356.
In Fig. 8 can be observed the movement of the
quadcopter along a square trajectory for a constant
altitude of 0.5. The movement in the XY plane has
a direct correlation with the pitch and roll orientation
of the drone. This means that leaning the quadcopter
forward and backward (pitch) enables the movement
Figure 7: PID simulation result.
in the X axis. Likewise, leaning sideways enables the
movement in the Y axis.
Figure 8: PID simulation results for trajectory and orien-
tation tracking (red is the setpoint, blue is the output and
green is the control action.
In Fig. 7 the set of references was [0.4, 0.2, 0.6,
0.8, 0.4], where r (reference) and y (sensor data) are
represented in the graphic above and the u (control ac-
tuation) below, which represents a nominal hovering
situation.
5.3 Sliding Mode Controller
The gains obtained for the SMC controller after op-
timization around the setpoint of 0.5 were: c =
7.1163, λ = 7.7377, g
e
= 16.4048, ρ = 5.3944, ε
c
=
18.7194 and p
c
= 0.2553.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
90
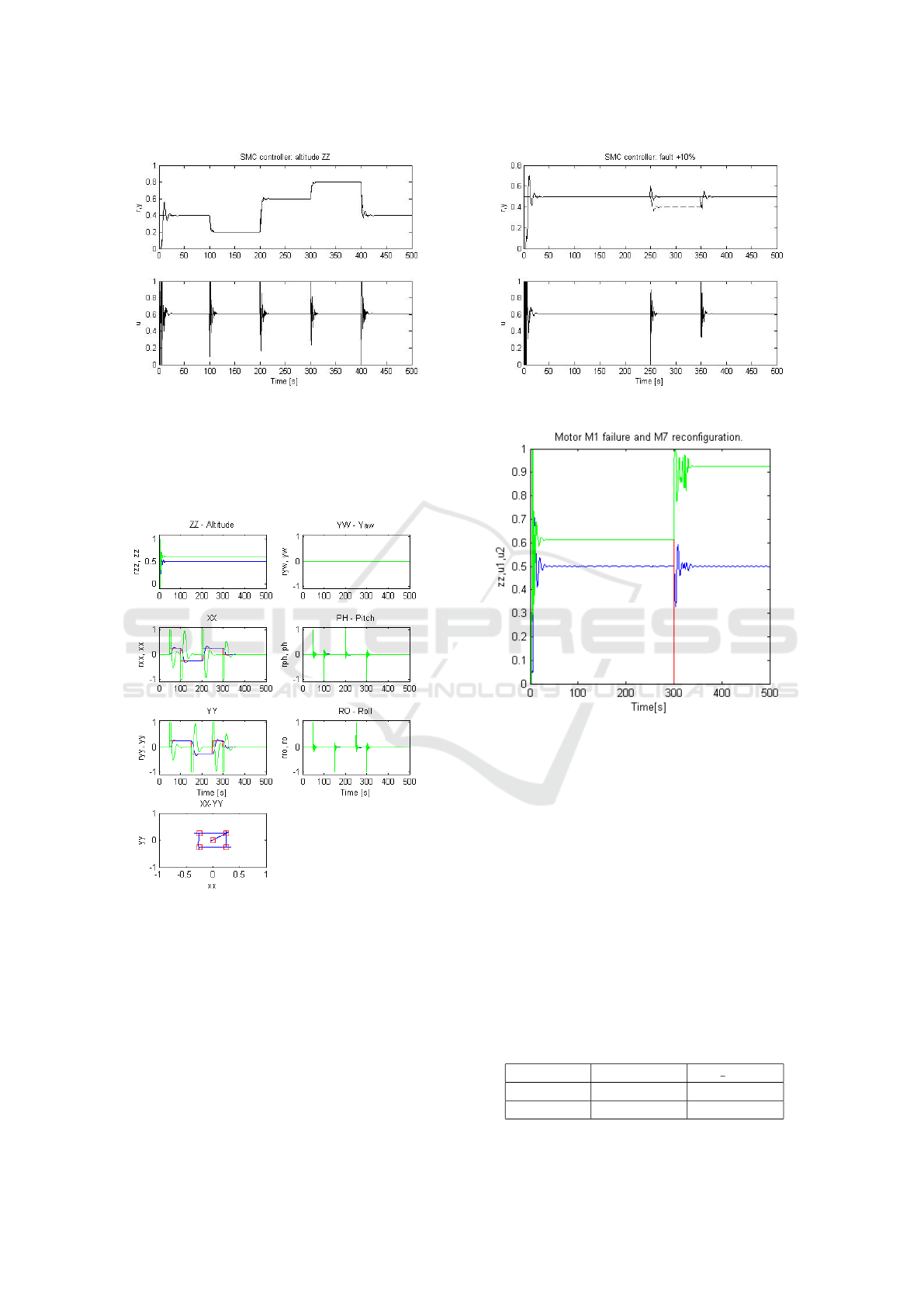
Figure 9: Sliding Mode Controller simulation result.
In Fig. 10 the same trajectory in the XY plane was
simulated. The sliding mode controller presents a fas-
ter dynamic than the PID due to its nonlinear beha-
vior, as depicted in pitch and roll figures.
Figure 10: Sliding Mode Controller simulation results for
trajectory and orientation tracking.
In the Fig. 9 the r (reference) and y (sensor data)
are represented in the graphic above and the u (control
actuation) below. The same reference [0.4, 0.2, 0.6,
0.8, 0.4] was defined for this simulation and it also
demonstrates a nominal hovering situation.
The Fig. 11 shows the behavior of the SMC when
in the presence of a 10% additive abrupt fault above
and its respective control actuation below.
In Fig. 12 a fault in motor 1 can be observed as
well as its reconfiguration by disabling the motor 7 at
Figure 11: Sliding Mode Controller with fault simulation.
Figure 12: Fault in motor 1 and reconfiguration by disabling
motor 7.
300 seconds when the drone loses altitude. After the
reconfiguration the thrust lost from the disabled mo-
tors has to be compensated by the other motors (their
control action increases from 0.6 to 0.9).
5.4 Controllers Performance
Comparison
Table 2 presents the performance indexes mean-
squared error (MSE) and variance of control action
(Var
u
) in altitude (Fig. 7 and Fig. 9).
Table 3 presents the performance indexes mean-
squared error (MSE) and the variance of control
Table 2: Controller performance comparison with SP = [0.4
0.2 0.6 0.8 0.4] in altitude.
Controller MSE Var u
PID 1.0903e-003 2.7262e-003
SMC 2.2237e-003 5.9492e-003
Quadcopter Control Approaches and Performance Analysis
91
Table 3: Controller performance for sensor fault recovery in
altitude.
Controller MSE Var u
PID 1.5060e-003 2.8384e-003
SMC 3.3218e-003 3.9561e-003
action (Var
u
), for an additive faulty sensor situation
(+10%).
From the graphics one must observe that both con-
trollers serve their intent maintaining the altitude and
responding to the different amplitude steps.
It is important to note that the non-linear SMC
controller has more control variance than the linear
PID controller because it has a faster response time
and has some chattering. The linear PID controller
demonstrates a slight better overall performance since
it is working around a linear operating point.
Although the controllers performance indexes ob-
served in Table 2 and 3 are similar, one can conclude
that, in case of an additive sensor fault, the PID con-
troller shows a better response in relation to the no-
minal behavior than the SMC. It is also noticeable
that, the control variance (Var u) of the SMC is not
affected by the sensor fault, it even decreases its va-
lue.
Table 4: Controller performance comparison with square
setpoint in the XY plane.
Controller MSE(X) + MSE(Y )
PID 0.0297
SMC 0.0217
Without faults, the XY trajectories related with the
PID and SM controllers were compared using a per-
formance index given by the sum of the mean square
error (MSE) according to the X axis plus the MSE
according to the Y axis.
The trajectory tracking of the PID and Sliding
Mode controllers present some overshoot, due to their
pure feedback architectures, which is not desired for
quadcopter path following. Differential Flatness con-
trol allows a null overshoot and near perfect tracking
of the desired orientations and trajectories, thanks to
its feedforward aspect that preemptively calculates
the best actuations for each trajectory (Brito et al.,
2018).
6 CONCLUSIONS
In this paper, fault tolerant control approaches of a
quadcopter model with X8 configuration were presen-
ted.
The particle swarm optimization (PSO) algorithm
reveals a good approach to obtain sub-optimal con-
trollers, as an optimal one would require a lot of com-
putational time and effort.
According to the simulation results, both control-
lers (PID and SMC) were able to fulfill their control
and tracking tasks.
Regarding the altitude trajectory tracking, both
controllers presented similar performance.
The Sliding Mode Controller presents a better per-
formance in the XY trajectory tracking.
The fault tolerant architecture presented an
efficient reconfiguration of the system when in
faulty situations, in which the quadcopter conti-
nues to fly when faults/failures happened in the sen-
sors/actuators.
Future work will take into account the overshoot
in the performance index of the PSO optimization in
order to improve the trajectory tracking.
ACKNOWLEDGEMENTS
This work has been supported by Departamento de
Engenharia Eletrotecnica of Faculdade de Ci
ˆ
encias
e Tecnologia of Universidade Nova de Lisboa, by
Uninova-CTS research unit, by CISUC research unit
and by national funds through FCT - Fundac
˜
ao para
a Ci
ˆ
encia e a Tecnologia within the research unit
CTS - Centro de Tecnologia e Sistemas (project
UID/EEA/00066/2013). The authors would like to
thank all the institutions.
REFERENCES
Astrom, K. J. (1995). PID controllers: theory, design and
tuning.
Blanke, M., Kinnaert, M., Lunze, J., and Staroswiecki, M.
(2006). Diagnosis and Fault-Tolerant Control.
Bouabdallah, S. and Siegwart, R. (2005). Backstepping and
Sliding-mode Techniques Applied to an Indoor Micro
Quadrotor. In Proceedings of the 2005 IEEE Interna-
tional Conference on Robotics and Automation, pages
2247–2252. IEEE.
Brito, A., Brito, V., Palma, L. B., Coito, F., and Gil, P.
(2018). Trajectory control approaches for a fault to-
lerant quadcopter. In 2018 International Young Engi-
neers Forum (YEF-ECE), pages 13–18. IEEE.
Brito, V. (2016). Fault Tolerant Control of a X8-VB Quad-
copter. Msc, FCT-UNL.
Brito, V., Brito Palma, L. F. F., Vieira Coito, F., and Val-
tchev, S. (2016). Modeling and Supervisory Control
of a Virtual X8-VB Quadcopter. In 17th International
Conference on Power Electronics and Motion Control,
page 8, Varna, Bulg
´
aria.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
92

Brito Palma, L., Moreira, J., Gil, P., and Coito, F. (2013).
Hybrid Approach for Control Loop Performance As-
sessment. KES-IDT - 5th International Conference on
Intelligent Decision Technologies, 2013.
Del Valle, Y., Venayagamoorthy, G. K., Mohagheghi, S.,
Hernandez, J.-C., and Harley, R. G. (2008). Particle
Swarm Optimization: Basic Concepts, Variants and
Applications in Power Systems. Evolutionary Com-
putation, IEEE Transactions on, 12(2):171–195.
Isermann, R. and Ball
´
e, P. (1997). Trends in the applica-
tion of model-based fault detection and diagnosis of
technical processes. Control Engineering Practice,
5(5):709–719.
Kennedy, J. and Eberhart, R. (1995). Particle swarm opti-
mization. Neural Networks, 1995. Proceedings., IEEE
International Conference on, 4:1942—-1948 vol.4.
Leong, B. T. M., Low, S. M., and Ooi, M. P. L. (2012).
Low-cost microcontroller-based hover control design
of a quadcopter. In Procedia Engineering, volume 41,
pages 458–464.
Luukkonen, T. (2011). Modelling and Control of Quadcop-
ter. Journal of the American Society for Mass Spectro-
metry, 22(7):1134–1145.
Merz, T. and Kendoul, F. (2013). Dependable low-altitude
obstacle avoidance for robotic helicopters operating in
rural areas. Journal of Field Robotics, 30(3):439–471.
Mustapa, Z., Saat, S., Husin, S. H., and Abas, N. (2014). Al-
titude controller design for multi-copter UAV. In 2014
International Conference on Computer, Communicati-
ons, and Control Technology (I4CT), pages 382–387.
IEEE.
Palma, L. B., Coito, F. V., Ferreira, B. G., and Gil, P. S.
(2015). PSO based on-line optimization for DC mo-
tor speed control. In 9th International Conference on
Compatibility and Power Electronics, CPE 2015, pa-
ges 301–306.
Shtessel, Y., Edwards, C., Fridman, L., and Levant, A.
(2014). Sliding Mode Control and Observation. Con-
trol Engineering. Springer New York, New York, NY.
Spurgeon, S. (2014). Sliding mode control : a tutorial. Proc.
of the European Control Conference (ECC), 2014,
(1):2272–2277.
TIME (2015). How Drones Are Already Being Used to
Help Save People.
Utkin, V., Guldner, J., and Shi, J. (1999). Sliding mode
control in electro-mechanical systems.
Yih, C.-C. (2016). Flight control of a tilt-rotor quadcop-
ter via sliding mode. In 2016 International Automatic
Control Conference (CACS), pages 65–70. IEEE.
Quadcopter Control Approaches and Performance Analysis
93
