
A Novel Method for Grouping Variables in Cooperative Coevolution
for Large-scale Global Optimization Problems
Alexey Vakhnin and Evgenii Sopov
Department of System Analysis and Operations Research, Reshetnev Siberian State University of Science and Technology,
Krasnoyarsk, Russia
Keywords: Large-scale Global Optimization, Variable Grouping Method, Cooperative Coevolution, Evolutionary
Algorithms.
Abstract: Large-scale global optimization (LSGO) is known as one of the most challenging problem for evolutionary
algorithms (EA). In this study, we have proposed a novel method of grouping variables for the cooperative
coevolution (CC) framework (random adaptive grouping (RAG))). We have implemented the proposed
approach in a new evolutionary algorithm (DECC-RAG), which uses the Self-adaptive Differential Evolution
(DE) with Neighborhood Search (SaNSDE) as the core search technique. The RAG method is based on the
following idea: after some predefined number of fitness evaluations in cooperative coevolution, a half of
subcomponents with the worst fitness values randomly mixes indices of variables, and the corresponding
evolutionary algorithms reset adaptation of parameters. We have evaluated the performance of the DECC-
RAG algorithm with the large-scale global optimization (LSGO) benchmark problems proposed within the
IEEE CEC 2010. The results of numerical experiments are presented and discussed. The results have shown
that the proposed algorithm outperforms some popular LSGO approaches.
1 INTRODUCTION
Many real-world problems deal with high
dimensionality and are driven by big data.
Optimization problems with many hundreds or
thousands of objective variables are called large-scale
global optimization problems. LSGO is still a
challenging problem for mathematical and
evolutionary optimization techniques. There exist
many examples of real-world LSGO problems from
different areas (Mei et al, 2014), (Jiang and Wang,
2014), (Lin et al, 2014) (data mining, engineering,
bioinformatics, optics, etc.).
The majority of hard real-world LSGO problems
is classified as the Black-Box (BB) optimization
problems. The key feature of the BB problems is that
there is no useful information about objective features
for improving the search process. We can only
request a fitness value
()
f
x for any point
x
from
the search space. Nevertheless, evolutionary
algorithms have proved their efficiency at solving
many BB optimization problems (Bäck, 1996),
(Gagn, 2012).
The general BB optimization problem can be
stated in the following way:
(
̅
)
=
(
,
,…,
) → min/max
̅
∈
(1)
≤
≤
, = 1,
(2)
(
,
,…,
)
≤0,
=1,
(3)
ℎ
(
,
,…,
)
=0,=1,
(4)
where ̅ ∈, ⊆
denotes the continuous
decision space, ̅ =(
,
,…,
)∈
is a vector
of decision variables, : →
stands for a real-
valued continuous nonlinear objective function.
Equation (2) defines side constrains, were
and
the lower and the upper bounds of a search interval,
respectively. Equations (3) and (4) define general
linear and nonlinear inequality and equality
constraints.
In this paper, we consider the unconstrained
minimization LSGO problem.
In this study, we have proposed a novel method
of grouping variables for the cooperative coevolution
framework, which is called random adaptive
Vakhnin, A. and Sopov, E.
A Novel Method for Grouping Variables in Cooperative Coevolution for Large-scale Global Optimization Problems.
DOI: 10.5220/0006903102610268
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 261-268
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
261

grouping (RAG). We have implemented the proposed
approach in a new evolutionary algorithm (DECC-
RAG). We have evaluated the performance of the
DECC-RAG algorithm with the LSGO benchmark
problems proposed within the IEEE CEC 2010. The
performance of the DECC-RAG has been compared
with the classical differential evolution (DE), the
original Self-adaptive Differential Evolution with
Neighborhood Search (SaNSDE).
The rest of the paper is organized as follows.
Section 2 describes related work. Section 3 describes
the proposed approach. In Section 4 the results of
numerical experiments are discussed. In the
Conclusion the results and further research are
discussed.
2 RELATED WORK
2.1 Classical Differential and
Self-Adaptive Differential
Evolution with Neighborhood
Search (SaNSDE)
Differential evolution (DE) is one the most popular
and efficient evolutionary algorithm. DE is a
stochastic, population-based search strategy
developed by (Storn and Price, 1995).
One of the further development of DE is the
SaNSDE algorithm proposed by (Yang et al, 2008b).
We have chosen this algorithm for our investigation
because of self-adaptive tuning of its parameters
during optimization process.
As known, the performance of any evolutionary
algorithm strongly depends on its control parameters.
The general list of DE parameters contains the type of
mutation, the differential weight value and F the
crossover probability value CR. The main feature of
the SaNSDE algorithm is that the algorithm
stochastically select a type of mutation and values of
CR and F, and then adapts F and CR values based on
the success of implementing a mutation operation.
After a predefined number of generations, the
SaNSDE recalculates probabilities for selection of a
type of mutation and values of CR and F.
There exist many approaches for solving LSGO
problems using DE and other evolutionary
algorithms. We can divide all approaches into two
main categories: cooperative coevolution (CC)
algorithms with problem decomposition strategy and
non-decomposition based methods. As it has been
shown in many studies, CC approaches usually
demonstrates higher performance. The most popular
CC approaches use different strategies for grouping
of objective variables. Some well-known techniques
are the static grouping (Potter and Jong, 2000), the
random dynamic grouping (Yang et al, 2008c) and the
learning dynamic grouping (Omidvar et al, 2014)).
2.2 Cooperative Coevolution
Decomposition methods based on cooperative co-
evolution are the most popular and widely used
approaches for solving LSGO problems. Cooperative
coevolution (CC) is an evolutionary framework that
divides a solution vector of an optimization problem
into several subcomponents and optimizes them
independently in order to solve the optimization
problem.
The first attempt to divide solution vectors into
several subcomponents was proposed by (Potter and
Jong, 1994). The approach proposed by Potter and
Jong (CCGA) decomposes a n-dimensional
optimization problem into n one-dimensional
problems (one for each variable). The CCGA
employs CC framework and the standard GA. Potter
and Jong had investigated two different modification
of the CCGA: CCGA-1 and CCGA-2. The CCGA-1
evolves each variable of objective in a round-robin
fashion using the current best values from the other
variables of function. The CCGA-2 algorithm
employs the method of random collaboration for
calculating the fitness of an individual by integrating
it with the randomly chosen members of other
subcomponents. Potter and Jong had shown that
CCGA-1 and CCGA-2 outperforms the standard GA.
The following pseudocode presents general CC
stages:
Pseudocode of Cooperative Coevolution
1: Decompose objective vector into m
smaller subcomponents;
2: i = 1;
3: while i < m do
Optimize i-th subcomponents with
EA, i = i + 1;
4: If termination condition is not
achieved then go to Step 2, else go
to Step 5;
5: Return best_solution.
The CC method is used for a wide range of real-
world applications ((Barrière and Lutton, 2009),
(García-Pedrajas et al, 2003) and (Liu et al, 2001)).
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
262

3 PROPOSED APPROACH
We have analyzed pros and cons of grouping-based
methods and DE-based approached, and have
proposed a new EA for solving large-scale global
optimization problems. The main idea of the
proposed search algorithm is to combine of an
original method of grouping variables for the CC with
problem decomposition strategy with the self-
adaptive DE (SaNSDE). The choice of the self-
adaptive approach is necessary as we have no any
information on a dependence between variables.
Thus, parameters of the search algorithms should be
adapted during the optimization process as
information about the grouping quality becomes
available.
As it is known, the CC approach can be efficient
only if the grouping of variables is correct. As shown
in (Omidvar et al, 2014), the learning dynamic
grouping is not able to divide variables into correct
subcomponents for many LSGO problems.
In the proposed approach, the grouping of
variables is random and adaptive. In the approach, the
number of grouped variables is equal for each
subcomponent. Such limitation excludes the
following problems:
- uneven distribution of computational
resources between search algorithms
(population sizes of EAs for each
subcomponent).
- tuning minimum and maximum numbers of
variables into group.
The proposed method of grouping (RAG (random
adaptive grouping)) works as follows. The n-
dimensional solution vector is divided into m s-
dimensional sub-components (m x s = n). We
randomly group variables into groups of equal sizes
using the uniform distribution. As we need to estimate
the quality of the distribution of variables, we will
perform the EA run within the predefined budget T of
the fitness function evaluation (each EA optimizes its
corresponding subcomponent). After that, we will
choose m/2 subcomponents with the worse
performance and randomly mix indices of its
variables. Finally, we will reset all EA parameters for
the worst m/2 sub-components after regrouping
variables. The reset is necessary because of the fact
that new grouping of variables defines a completely
different optimization problem.
The complete algorithm is called DECC-RAG.
The procedure of DECC-RAG can be descripted by
the following pseudo-code.
Pseudocode of DECC-RAG algorithm
1: Set FEV_global, T, FEV_local
= 0;
2: An n-dimensional object vector is
randomly divided into m
s-dimensional subcomponents;
3: Randomly mix indices of variables;
4: i = 1;
5: Evolve the i-th subcomponent with
SaNSDE algorithm;
6: If i < m, then i++, and go to Step
5 else go to Step 7;
7: Choose the best_solution
i
for each
subcomponents;
8: If (FEV_local < T) then go to Step
4 else go to Step 9;
9: Choose m/2 subcomponents with the
worse performance and randomly mix
indices of its subcomponents, restart
parameters of SaNSDE in these m/2
subcomponents, FEV_local = 0;
10: If (FEV>0) go to Step 4, else go
to Step 11;
11: Return the best solution.
4 EXPERIMENTAL SETTINGS
AND RESULTS
We have evaluate the performance of DE, SaNSDE
and the proposed DECC-RAG algorithm on the 20
LSGO benchmark problems provided within the
CEC’10 special session on Large Scale Global
Optimization (Ke et al, 2010). These benchmark
problems have been specially endowed with the
properties that real-world problems have.
The performance of DECC-RAG algorithm was
also compared with other well-known state-of-the-art
LSGO algorithms such as DMS-L-PSO (dynamic
multi-swarm and local search based on PSO
algorithm) (Liang and Suganthan, 2005), DECC-G
(cooperative coevolution with random dynamic
grouping based on differential evolution) (Yang et al,
2008c), MLCC (Multilevel cooperative coevolution
based on differential evolution) (Yang et al, 2008a)
and DECC-DG (cooperative coevolution with
differential grouping based on differential evolution)
(Omidvar et al, 2014). More detailed experimental
results for DMS-L-PSO, DECC-G, MLCC and
DECC-DG can be found in (Yang et al, 2017).
The DECC-RAG algorithm settings are: NP = 50
(population size for each subcomponent), m = 10 and
T = 3x10
5
. T is a parameter that represents a number
of FEVs (function evaluations) before the stage of
randomly mixing of the worse m/2 subcomponents.
A Novel Method for Grouping Variables in Cooperative Coevolution for Large-scale Global Optimization Problems
263

All experimental settings are as proposed in the
rules of the CEC’10 LSGO competition were used for
experiments:
- dimensions for all problem are D = 1000;
- 25 independent runs for each benchmark
problem;
- 3x10
6
fitness evaluations in each independent
run of algorithm;
- the performance of algorithms is estimated
using the median value of the best found
solutions.
We have implemented the proposed approach and
DE and SaNSDE algorithms with С++ language. As
it is known, LSGO problems are computationally
expensive. The Table 1 shows the runtime of 10000
fitness evaluations for each benchmark problem using
1 thread of the AMD Ryzen 7 1700x processor.
We have implemented all our numerical
experiments using the OpenMP framework for
parallel computing with 16 threads, where each
thread was allocated for one benchmark problem.
Figure 1 demonstrate the calculation time (in hours)
of all benchmark problems with 16 threads and with
1 thread. As we can see from Figure 1, the calculation
time for the fitness function was reduced 5.9 times.
The results of 25 independent runs are presented
in Table 2. The first column contains the benchmark
problem number, the next columns contain mean
performance for all investigated algorithms. There are
two values in each cell: median value and standard
deviation of the best-found solutions obtained with 25
independent runs. The last row of the Table 2 contains
ranks for all algorithm averaged over all benchmark
problems. The rank of an algorithm is defined by the
median value, smaller median value defines smaller
rank.
Table 3 and Table 4 show results of Mann–
Whitney U test of statistical significance in the results
of 25 independent runs for DECC-RAG vs DE and
DECC-RAG vs SaNSDE, respectively. The
calculation of p-values has been performed using the
R language in the R-studio software. We use the
following notations in Tables 3 and 4: the sign “<”
means that for the current pair of algorithms, the first
algorithm outperforms the second one, otherwise the
sign “>” is used, and the sign “≈” is used when there
is no statistical significant difference in the results.
The p-value for all tests was equal to 0.05.
Figures 2, 3, 4, 5 and 6 demonstrate the dynamic
of the average performance (25 independent runs) of
DE, SaNSDE and the DECC-RAG algorithms for
some benchmark problems. The bottom axis contains
the number of the fitness function evaluations, and the
vertical axis contains the average value of the fitness
function.
As we can see from the results from Table 2, the
proposed DECC-RAG algorithm outperforms on
average some state-of-art algorithms such as DMS-L-
PSO, DECC-G, MLCC and DECC-DG.
Figures 2-6 show that the DECC-RAG provides
better average fitness value that the classical DE and
the standard SaNSDE algorithms do.
The statistical significance of differences in the
results for DECC-RAG vs SaNSDE was not observed
only on the 6-th benchmark problem.
We have estimated the performance of the DECC-
RAG for different sizes of subcomponents, and can
conclude that the best performance is obtained with
the number of groups equal to 10 (m = 10).
5 CONCLUSIONS
In this study, we have proposed a new EA for large-
scale global optimization problems. The approach
uses an original random adaptive grouping method
for cooperative coevolution framework.
We have tested the proposed DECC-RAG
algorithm on the representative set of 20 benchmark
problems from the CEC’10 LSGO special session and
competition, and have compared the results of the
numerical experiments with other state-of-art
techniques. The experimental results have shown that
the DECC-RAG outperforms on average DMS-L-
PSO, DECC-G, MLCC and DECC-DG algorithms.
The issues needed to be further studied are:
- design more effective self-adaptive method of
grouping variables based on randomness;
- improve performance of SaNSDE algorithm
for more effective use in cooperative
coevolution framework to solve LSGO
problems.
In further work, we will provide more detailed
analysis of the DECC-RAG parameters and will
estimate the performance of the DECC-RAG with
other benchmark problems for higher dimensions. We
will also try alternative random grouping strategies.
ACKNOWLEDGEMENTS
This research is supported by the Ministry of
Education and Science of Russian Federation within
State Assignment № 2.1676.2017/ПЧ.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
264

REFERENCES
Bäck, T. (1996) Evolutionary Algorithms in Theory and
Practice: Evolution Strategies, Evolutionary
Programming, Genetic Algorithms, Science.
Barrière, O. and Lutton, E. (2009) ‘Experimental analysis
of a variable size mono-population cooperative-
coevolution strategy’, in Studies in Computational
Intelligence, pp. 139–152. doi: 10.1007/978-3-642-
03211-0_12.
Brest, J., Zumer, V. and Maucec, M. S. (2006) ‘Self-
Adaptive Differential Evolution Algorithm in
Constrained Real-Parameter Optimization’, 2006 IEEE
International Conference on Evolutionary
Computation, pp. 215–222. doi: 10.1109/CEC.2006.16
88311.
Gagn, C. (2012) ‘DEAP : Evolutionary Algorithms Made
Easy’, Journal of Machine Learning Research, 13, pp.
2171–2175. doi: 10.1.1.413.6512.
García-Pedrajas, N., Hervás-Martínez, C. and Muñoz-
Pérez, J. (2003) ‘COVNET: A cooperative
coevolutionary model for evolving artificial neural
networks’, IEEE Transactions on Neural Networks,
14(3), pp. 575–596. doi: 10.1109/TNN.2003.810618.
Jiang, B. and Wang, N. (2014) ‘Cooperative bare-bone
particle swarm optimization for data clustering’, Soft
Computing, 18(6). doi: 10.1007/s00500-013-1128-1.
Ke, T., Xiaodong, L., P. N., S., Zhenyu, Y., Thomas, W.,
(2010) ‘Benchmark Functions for the CEC’2010
Special Session and Competition on Large-Scale
Global Optimization’. Technical report, Univ. of
Science and Technology of China 1–23.
Liang, J. J. and Suganthan, P. N. (2005) ‘Dynamic multi-
swarm particle swarm optimizer’, in Proceedings -
2005 IEEE Swarm Intelligence Symposium, SIS 2005,
pp. 127–132. doi: 10.1109/SIS.2005.1501611.
Lin, L., Gen, M. and Liang, Y. (2014) ‘A hybrid EA for
high-dimensional subspace clustering problem’, in
Proceedings of the 2014 IEEE Congress on
Evolutionary Computation, CEC 2014, pp. 2855–2860.
doi: 10.1109/CEC.2014.6900313.
Liu, Y. et al. (2001) ‘Scaling up fast evolutionary
programming with cooperative coevolution’, in
Proceedings of the 2001 Congress on Evolutionary
Computation (IEEE Cat. No.01TH8546), pp. 1101–
1108. doi: 10.1109/CEC.2001.934314.
Mei, Y., Li, X. and Yao, X. (2014) ‘Variable neighborhood
decomposition for Large Scale Capacitated Arc
Routing Problem’, in Proceedings of the 2014 IEEE
Congress on Evolutionary Computation, CEC 2014, pp.
1313–1320. doi: 10.1109/CEC.2014.6900305.
Omidvar, M. N. et al. (2014) ‘Cooperative co-evolution
with differential grouping for large scale optimization’,
IEEE Transactions on Evolutionary Computation,
18(3), pp. 378–393. doi: 10.1109/TEVC.2013.22
81543.
Potter, M. A. and Jong, K. A. (1994) ‘A cooperative
coevolutionary approach to function optimization’, pp.
249–257. doi: 10.1007/3-540-58484-6_269.
Potter, M. A. and Jong, K. A. De (2000) ‘Cooperative
Coevolution: An Architecture for Evolving Coadapted
Subcomponents’, Evolutionary Computation, 8(1), pp.
1–29. doi: 10.1162/106365600568086.
Storn, R. and Price, K. (1995) ‘Differential Evolution - A
simple and efficient adaptive scheme for global
optimization over continuous spaces’, Technical report,
International Computer Science Institute, (TR-95-012),
pp. 1–15. doi: 10.1023/A:1008202821328.
Yang, Q. et al. (2017) ‘A Level-based Learning Swarm
Optimizer for Large Scale Optimization’, IEEE
Transactions on Evolutionary Computation. doi:
10.1109/TEVC.2017.2743016.
Yang, Z., Tang, K. and Yao, X. (2008a) ‘Multilevel
cooperative coevolution for large scale optimization’,
in 2008 IEEE Congress on Evolutionary Computation,
CEC 2008, pp. 1663–1670. doi: 10.1109/CEC.2008.46
31014.
Yang, Z., Tang, K. and Yao, X. (2008b) ‘Self-adaptive
differential evolution with neighborhood search’, in
2008 IEEE Congress on Evolutionary Computation,
CEC 2008, pp. 1110–1116. doi: 10.1109/CEC.2008.46
30935.
Yang, Z., Tang, K. and Yao, X. (2008c) ‘Large scale
evolutionary optimization using cooperative
coevolution’, Information Sciences, 178(15), pp. 2985–
2999. doi: 10.1016/j.ins.2008.02.017.
APPENDIX
Table 1: Runtime of 10000 FEs (in seconds) on the CEC’10 LSGO benchmark problems.
Func. № F1 F2 F3 F4 F5 F6 F7 F8 F9 F10
Time 0.396 0.209 0.21 0.52 0.334 0.34 0.309 0.307 1.312 1.134
Func. № F11 F12 F13 F14 F15 F16 F17 F18 F19 F20
Time 1.139 0.112 0.126 2.219 2.016 2.04 0.077 0.133 0.072 0.1
A Novel Method for Grouping Variables in Cooperative Coevolution for Large-scale Global Optimization Problems
265

Table 2: Experimental results on the CEC’10 LSGO benchmark problems.
№ func. DECC-RAG DE SaNSDE DMS-L-PSO DECC-G MLCC DECC-DG
F1 2.69E-18 4.19E+08 2.00E+04 1.61E+07 3.53E-07 1.66E-14 1.42E+02
5.10E-18 2.75E+08 2.04E+06 1.41E+06 1.44E-07 2.97E-12 4.66E+04
F2 7.33E+02 7.38E+03 2.80E+03 5.53E+03 1.32E+03 2.43E+00 4.46E+03
7.52E+01 3.02E+02 1.67E+02 5.38E+02 2.55E+01 1.52E+00 1.87E+02
F3 1.64E+00 1.95E+01 1.47E+01 1.56E+01 1.14E+00 6.24E-10 1.66E+01
1.77E-01 8.60E-02 4.31E-01 1.08E-01 3.35E-01 1.12E-06 3.02E-01
F4 9.50E+11 8.78E+12 2.82E+12 4.32E+11 2.46E+13 1.78E+13 5.08E+12
3.50E+11 3.43E+12 1.01E+12 8.05E+10 8.14E+12 5.47E+12 1.89E+12
F5 1.54E+08 7.96E+07 9.00E+07 9.35E+07 2.50E+08 5.11E+08 1.52E+08
4.41E+07 2.12E+07 8.22E+06 9.04E+06 6.84E+07 1.07E+08 2.15E+07
F6 2.04E+01 2.09E+01 1.27E+06 3.66E+01 4.71E+06 1.97E+07 1.64E+01
5.75E+06 6.84E+06 8.12E+05 1.21E+01 1.03E+06 4.37E+06 3.45E-01
F7 2.90E+02 3.08E+08 1.90E+05 3.47E+06 6.57E+08 1.15E+08 9.20E+03
8.22E+02 1.76E+08 6.18E+04 1.16E+05 5.40E+08 1.45E+08 1.26E+04
F8 1.78E+07 2.53E+08 8.16E+06 2.02E+07 9.06E+07 8.82E+07 1.62E+07
7.43E+08 3.88E+08 2.22E+07 1.88E+06 2.64E+07 3.40E+07 2.63E+07
F9 6.17E+07 5.56E+08 2.31E+08 2.08E+07 4.35E+08 2.48E+08 5.52E+07
8.72E+06 8.20E+07 9.95E+07 1.58E+06 4.87E+07 2.16E+07 6.45E+06
F10 3.25E+03 7.72E+03 9.40E+03 5.09E+03 1.02E+04 3.97E+03 4.47E+03
1.88E+02 2.47E+02 2.82E+02 4.26E+02 3.13E+02 1.45E+03 1.29E+02
F11 2.16E+02 1.88E+02 1.74E+02 1.68E+02 2.59E+01 1.98E+02 1.02E+01
1.31E+01 6.40E+00 1.51E+01 1.90E+00 1.73E+00 1.12E+00 8.71E-01
F12 8.88E+03 5.59E+05 4.03E+05 2.83E+01 9.69E+04 1.01E+05 2.58E+03
1.15E+03 6.91E+04 4.83E+04 9.88E+00 9.55E+03 1.57E+04 1.08E+03
F13 1.56E+03 1.01E+09 2.52E+04 1.03E+05 4.59E+03 2.12E+03 5.06E+03
3.81E+03 6.79E+08 1.61E+05 6.18E+04 4.16E+03 4.70E+03 3.65E+03
F14 2.01E+08 1.60E+09 7.78E+08 1.25E+07 9.72E+08 5.71E+08 3.46E+08
2.07E+07 1.52E+08 1.28E+08 1.62E+06 7.52E+07 5.50E+07 2.42E+07
F15 5.16E+03 7.75E+03 1.06E+04 5.48E+03 1.24E+04 8.67E+03 5.86E+03
3.60E+02 2.55E+02 4.34E+02 3.46E+02 8.24E+02 2.07E+03 1.05E+02
F16 4.13E+02 3.77E+02 3.73E+02 3.18E+02 6.92E+01 3.96E+02 7.50E-13
3.05E+01 4.32E+00 1.12E+01 2.04E+00 6.43E+00 5.76E+01 6.25E-14
F17 1.68E+05 1.04E+06 8.68E+05 4.75E+01 3.11E+05 3.47E+05 4.02E+04
1.17E+04 7.94E+04 6.84E+04 1.15E+01 2.24E+04 3.11E+04 2.29E+03
F18 4.96E+03 4.15E+10 5.83E+05 2.50E+04 3.54E+04 1.59E+04 1.47E+10
6.35E+03 1.70E+10 1.81E+08 1.10E+04 1.53E+04 9.48E+03 2.03E+09
F19 2.23E+06 2.96E+06 1.93E+06 2.03E+06 1.14E+06 2.04E+06 1.75E+06
1.93E+05 4.01E+05 1.89E+05 1.41E+05 6.23E+04 1.42E+05 1.10E+05
F20 1.84E+03 5.25E+10 2.80E+05 9.82E+02 4.34E+03 2.27E+03 6.53E+10
5.04E+02 1.58E+10 1.37E+07 1.40E+01 8.25E+02 2.26E+02 6.97E+09
Average
Rank
2.8 5.85 4.3 3.15 4.5 4.2 3.2
Table 3: Results of Mann–Whitney U test for DECC-RAG vs DE.
F
1
F
2
F
3
F
4
F
5
F
6
F
7
F
8
F
9
F
10
< < < < > < < < < <
F
11
F
12
F
13
F
14
F
15
F
16
F
17
F
18
F
19
F
20
> < < < < > < < < <
Table 4: Results of Mann–Whitney U test for DECC-RAG vs SaNSDE.
F
1
F
2
F
3
F
4
F
5
F
6
F
7
F
8
F
9
F
10
< < < < > ≈ < > < <
F
11
F
12
F
13
F
14
F
15
F
16
F
17
F
18
F
19
F
20
> < < < < > < < > <
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
266
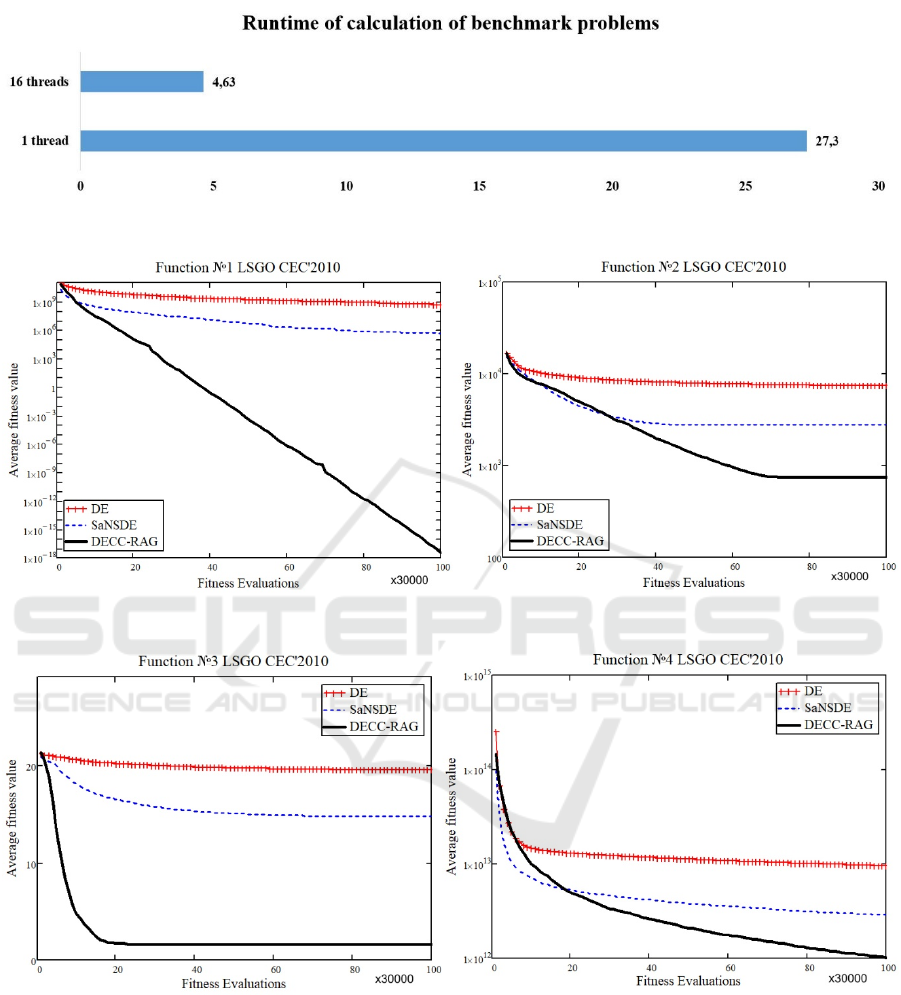
Figure 1: Runtime (in hours) for CEC’10 LSGO benchmark problems using 1 thread and 16 threads.
Figure 2: The average performance for F1 and F2 problems.
Figure 3: The average performance for F3 and F4 problems.
A Novel Method for Grouping Variables in Cooperative Coevolution for Large-scale Global Optimization Problems
267

Figure 4: The average performance for F7 and F9 problems.
Figure 5: The average performance for F10 and F13 problems.
Figure 6: The average performance for F18 and F20 problems.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
268
