
Opening up New Fail-safe Layers
in Distributed Vehicle Computer Systems
Johannes Büttner, Markus Kucera and Thomas Waas
Ostbayerische Technische Hochschule Regensburg,
Faculty of Computer Science and Mathematics,
93053 Regensburg, Germany
Keywords:
Automotive, System Architecture, Safety Against Failure.
Abstract:
The automotive industry currently faces several challenges, including a growing complexity in system ar-
chitecture. At the same time, the task load as well as the needs for performance increase. To address this
problem, the A3F
a
research project evaluates scalable distributed concepts for future vehicle system architec-
tures. These can be seen as comparable to cluster-computing systems, which are applied in high-performance
or high-availability use-cases. Methods used in such scenarios will also be important features in future vehicle
architectures such as horizontal application scalability, application load balancing and reallocation, as well as
functionality upgrades triggered by the user.
This paper focuses on concepts and methods for the reliability of applications and hardware in future in-vehicle
distributed system architectures. It is argued that future automotive computing systems will evolve towards
enterprise IT systems similar to today’s data centers. Furthermore, it is stated these vehicle systems can benefit
greatly from IT systems.
In particular, the safety against failure of functions and hardware in such systems is discussed. For this purpose,
various of such mechanisms used in information technology are investigated. A layer-based classification is
proposed, representing the different fail-safe levels.
1 INTRODUCTION
Digitilisation has brought about enormous change in
many industrial sectors over the last two decades.
Through a higher online presence of individuals and
the associated expansion of IT infrastructures, such as
cloud computing services providers have been using
highly scalable, distributed systems productively for
years in order to ensure high availability and high per-
formance of their services – even under strongly fluc-
tuating user numbers. Important features of such sy-
stems are flexibility and the possibility of continuous
further development of both the applications offered
and the infrastructures themselves (upgradeability).
On the other hand, the size and complexity of
control software is increasing in the automotive in-
dustry, as (Reinhardt et al., 2016) notes. This is
accompanied by the need for increasing calculation
speeds and a higher communication bandwidth bet-
ween the software components. However, the hetero-
a
“Ausfallsichere Architekturen für Autonome Fahrzeuge”
– fail-safe architectures for autonomous driving vehicles
geneous network infrastructures in current vehicles is
reaching their limits (Weckemann, 2014). Assuming
that future connected cars as well as automated dri-
ving vehicles will require even more communication
bandwidth, the current network infrastructure is not a
profitable option for such vehicles.
In addition, changing user expectations demand
flexible architectural patterns and upgradeability wit-
hout the need to visit a garage. This establishes new
business models (“pay-per-use”). Instead of purcha-
sing special equipment-functions which require their
own ECU, customers should be able to subscribe to
or unsubscribe from that function in the future on de-
mand and without the need for costly hardware in-
terventions. Similar business models have been used
successfully in enterprise IT and cloud computing for
years. This also enables manufacturers to integrate
security-relevant, error-repairing or simply function-
enhancing software updates with little effort. Howe-
ver, the current, statically developed and configured
ECU topology does not offer any practicable possibi-
lities for this.
98
Büttner, J., Kucera, M. and Waas, T.
Opening up New Fail-safe Layers in Distributed Vehicle Computer Systems.
DOI: 10.5220/0006903600980102
In Proceedings of the 8th International Joint Conference on Pervasive and Embedded Computing and Communication Systems (PECCS 2018), pages 98-102
ISBN: 978-989-758-322-3
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The desired flexibility requires a fundamental re-
vision and redesign of the actual in-vehicle system
architectures. This is accompanied by the conver-
sion of structures and development processes of the
corresponding manufacturers (Conway, 1968). This
trend can often be found under the heading “service-
oriented architecture”. A new type of system architec-
ture is expected to meet future requirements in terms
of space, cost, performance and energy consumption
of the computing units in the vehicle, which arise on
the one hand as a result of applications such as au-
tomated driving, and on the other hand as a result of
changed user expectations.
Flexible, service-oriented architectural patterns
have proven themselves in information technology for
years. With the increasing spread of key technologies
such as automotive Ethernet and the use of service-
oriented architectures in vehicles, the synergy poten-
tial between these sectors is increasing (Doherty et al.,
2004). Therefore it naturally comes to mind to inves-
tigate technologies and concepts from the IT sector
and to evaluate their usability in the vehicle.
2 APPROACH OF THIS
RESEARCH
A similar development has taken place in the field of
enterprise IT (cluster computing). Technologies such
as Ethernet, virtualization and flexible software archi-
tectures have proven themselves here for years. Re-
levant infrastructures, for example from cloud com-
puting providers have commonly been used in high-
performance or high-availability applications. In the
research project A3F we investigate which of these
concepts and methods can be applied to modern vehi-
cle system architectures. Among other things, the aim
is to assess the synergy potential of the two sectors in-
formation technology and automotive industry, which
to date have very different orientations. However, this
synergy is expected to grow strongly in the course of
the developments mentioned above.
The aforementioned investigations are carried out
using a test cluster. In the following, the hardware
and software of this cluster and the reasons for their
selection will be discussed briefly.
2.1 Hardware
Many applications of modern in-vehicle functions pri-
marily require high processing speeds, but are not de-
pendent on specific surrounding hardware and thus
can be executed on generic processors. Examples
of this are multimedia applications, algorithms for
image processing or calculations of optimal vehicle
speeds and routes.
In the A3F project, a computer cluster consisting
of sev- eral nodes is proposed, on which performance-
demanding and computation-intensive applications
are executed, e.g. the calculation of optimal vehicle
speeds and routes, but no real-time control functions.
We believe that such functions as well as special
control devices for actuators, sensors and possible ga-
teways for bus systems will continue to exist and re-
main connected to the computer cluster. The functi-
ons running on such a cluster should be executable on
almost any node.
There are several reasons why this is desirable:
• scalablility: It becomes easy to implement vehi-
cle platform equipment with a variable number of
computing units, which can be higher in premium
vehicles than in cheaper models, for example. At
the same time, it is possible to make simple chan-
ges to this equipment if required, for example if
a customer wishes to purchase additional features
and the existing hardware is no longer sufficient.
• safety against failures: Certain functions must
be highly available for security reasons. These
can be executed redundantly on various nodes.
Furthermore, in case of hardware errors, software
functions can be moved to other nodes.
• performance: It is expected that a computer clus-
ter will provide enough computing power to solve
the tasks faced in autonomous vehicles.
• independence of manufacturers: By using generic
hardware units, these are interchangeable and ma-
nufacturers no longer have to keep their control
units in stock for decades.
• upgradeability: By enabling dynamic allocation
of functions to nodes, both hardware and software
can be easily exchanged, added or upgraded.
The proposed system consists of several Intel
NUC-Kits. These are often used in the relevant fields
as examples of homogeneous, powerful but generic
hardware units with high resources (e.g. CPU, RAM).
They are connected via an Ethernet network.
2.2 Software
The architecture examined in this project should make
it possible to flexibly retrofit software updates into the
computer cluster. It should therefore be possible to
run individual applications on any node in the cluster,
largely independently of specific hardware. In addi-
tion, several software functions should be able to be
executed on individual hardware units. In addition, it
is evaluated whether and how functions can be added
Opening up New Fail-safe Layers in Distributed Vehicle Computer Systems
99

at runtime, moved within the cluster or updated (for
security updates, for example).
As frequently seen in cluster computing architec-
tures, the overall system is designed such that appli-
cations are not tightly coupled to a specific computing
unit. Instead, we use a container engine to encapsu-
late applications with their runtime environment and
dependencies. In this way, the infrastructure gains the
necessary flexibility so that live migrations of appli-
cations between different computing units can be car-
ried out. Moreover, this provides an easy way to mo-
nitor applications per process as each container typi-
cally includes only one process. Finally, containers
offer a simple way to limit the resource consumption
of an application.
This step implies a fundamental redesign of the af-
fected software and ECU architecture of todays vehi-
cles, as some basic assumptions of traditional E/E ar-
chitectures become invalid. At the same time, the
shift towards distributed systems took place years ago
in a similar form in enterprise IT and cloud computing
infrastructures. The extent to which applied techno-
logies and concepts can be applied in modern vehicle
architectures will therefore be examined.
However, this requires a precise knowledge and
examination of the technical details and problems of
both sectors. Since safety is a high priority in the au-
tomotive sector, an overview of the various possibi-
lities for implementing safety against failures in IT
server systems is presented in this paper.
3 FAILOVER STRATEGIES
Looking at the various fail-safe mechanisms of server
systems used in information technology, one will first
realize that there are a multitude of possibilities for
realizing this. Specifically, as depicted in 1, such sy-
stems can be divided into several logical layers, and
there are different approaches and procedures, depen-
ding on the level at which failover is implemented.
Therefore, the different layers of such a system will
be discussed in the following.
3.1 Logical Layers of Distributed
Systems
The layers mentioned above are in principle layers of
abstraction designed to ensure interoperability and in-
terchangeability. Fixed interfaces are defined for the
levels adjacent above and below, so that the concrete
implementation of a level only has to adhere to these
interfaces. First of all, it should be mentioned that any
VMware ESXi, HyperV, Xen
CPU, RAM, Storage, Network
CORBA, MSMQ
Middleware
CentOS, Debian, ResinOS, CoreOS
Docker, rkt, LXC, OCI
Container
Hypervisor
Hardware
OS
C, C++, Java, Erlang, ...
Applikation
Figure 1: Logical Layers of Distributed Systems, with ex-
amples.
number of layers can be defined, which - depending
on the complexity of the respective application case -
represent a reasonable abstraction or an unnecessary
complication. An example of a proven layer model is
the well-known Open Systems Interconnection mo-
del (OSI model). It defines seven layers with which
communication between computing units in computer
networks can take place. This model is standardized
and is used to cope with the complexity of communi-
cation systems.
Such a model can also be defined for server sy-
stems, although there is no standardized form here.
However, specified interfaces between the layers do
exist. In the course of this work the different levels
are needed for a classification.
Hardware. The lowest level represents the physical
hardware of a computer system, such as CPU, me-
mory or non-volatile memory. Connections to perip-
heral devices and the network infrastructure also be-
long to this level.
Hypervisor. On server systems, virtual machines
have been used almost exclusively for several years.
These allow the often generously dimensioned resour-
ces of a server to be divided into smaller segments,
each equipped with its own operating system and ful-
filling its own task. In this way, several small servers,
each of which previously required its own hardware,
are merged on more powerful servers. A hypervisor
is used here as the administration instance. This is
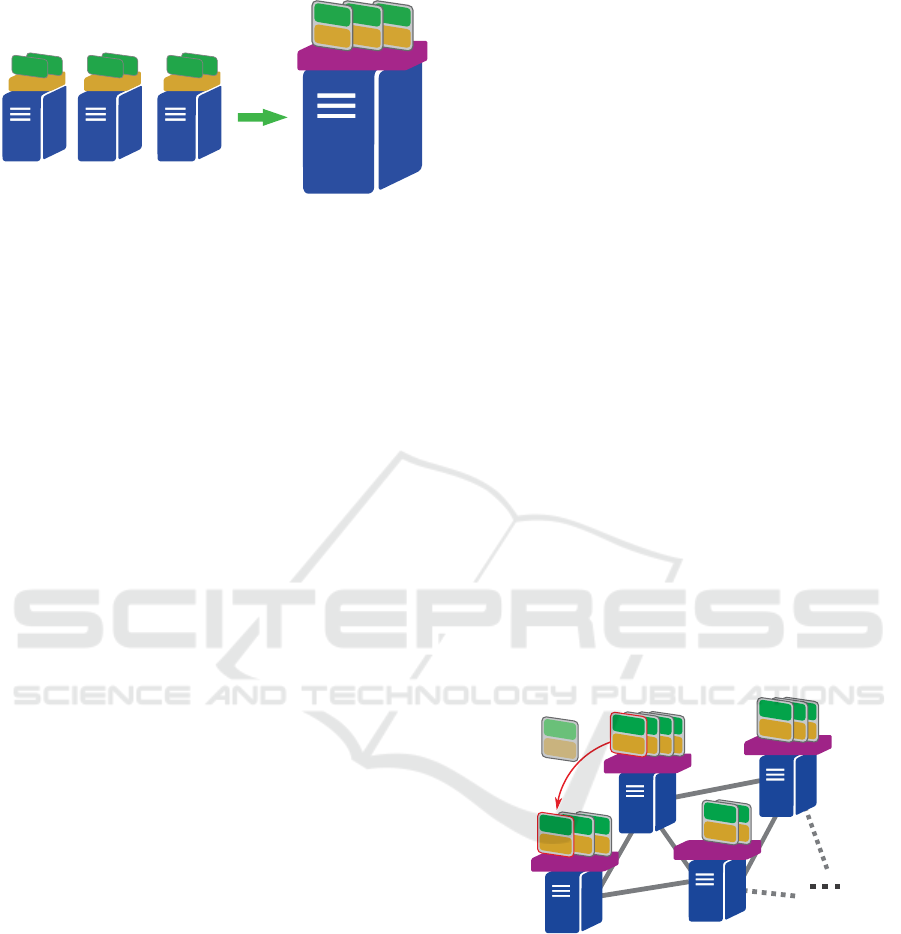
shown schematically in figure 2.
Operating System. Servers today mostly use
Linux-based operating systems. Applications or pro-
grams are then programmed against a special standar-
dized interface (e.g. POSIX). One of the most impor-
tant tasks of an operating system in this context is to
run programs largely hardware-independent. An ope-
rating system must therefore have an exact knowledge
of the hardware on which it was installed.
PEC 2018 - International Conference on Pervasive and Embedded Computing
100
Hypervisor
App
OS
App
OS
App
OS
OS
App
App
OS
App
App
OS
App
App
Figure 2: Consolidation of multiple small servers on power-
ful servers with hypervisor.
Container. With the arrival of web-distributed sys-
tems and applications that can be flexibly scaled to be-
tween a thousand and ten thousand instances depen-
ding on the load, the virtual machine is once again of
lesser importance because it is too heavy to guarantee
this type of flexibility. Examples include e-commerce
systems such as eBay or amazon, or media streaming
services such as Netflix or Spotify. To improve cus-
tomer satisfaction, they strive for constant availability
of their services - even under strongly fluctuating user
numbers.
Lighter virtualization technologies, called contai-
ners, have therefore become established for such ap-
plications. As opposed to virtual machines, these do
not require their own operating system. Such contai-
ners can be started up at high speed on computers in
the event of an increase in user requests. Correspon-
ding investigations(Xavier et al., 2013) have shown
that container technology is superior to the virtual
machine in its performance. However, some ques-
tions remain unanswered with regard to security as-
pects(Mohallel et al., 2016) that do not arise with a
virtual machine.
Middleware. Middleware refers to one or more ab-
straction layers that ensure interoperability and trans-
parency. The exact definition is seen differently in the
literature. It is typically intended to hide the under-
lying infrastructure from application developers, thus
relieving them from paying attention to certain techni-
cal details, so that they can concentrate on the functi-
onalities. It can also add additional technical, non-
functional features.
There are different types of middleware. On the
one hand, there is the Remoting Middleware, which
enables method calls via the network. Examples are
CORBA, Java RMI and .NET Remoting. On the ot-
her hand, there is the messaging middleware, which
deals with communication with other components via
messages. Examples are MSMQ or MQSeries; there
are also standards such as MQTT.
Application. The application level represents the
highest level in a distributed server system and con-
tains the actual logic and functionality. Such applica-
tions are written in a programming language like C,
C++ or Java. They are closely linked to the operating
system on which they are to be executed.
After this classification, we examine at which le-
vel existing fail-safe mechanisms are implemented
and which advantages and disadvantages result from
this.
3.2 Fail-safe Layers
There are various possibilities to realize safety against
failure. Characteristic for the strategies presented
here is that the task of one application is taken over by
a second (backup) application in the event of an error,
so that the overall system never fails. This strategy is
often referred to as „fail-operational“. It differs from
conventional strategies, which often only provide for
the safety-critical function to be switched off in the
event of a fault (fail-safe). It is assumed here that the
correct function of an automotive ECU can be gua-
ranteed by maintaining it - in the event of an error or
component failure - by a second, redundantly running
ECU. In addition, applications should be able to mi-
grate to a second ECU at runtime in order to be able to
reconfigure the entire system in the event of an error.
This corresponds to the usual procedure in the server
environment and is shown in 3.
Hypervisor
App
OS
App
OS
App
OS
Hypervisor
App
OS
App
OS
App
OS
Hypervisor
App
OS
App
OS
App
OS
App
OS
Hypervisor
App
OS
App
OS
App
OS
Figure 3: Moving or migrating applications at runtime.
Hypervisor-layer. The hypervisor provider VM-
ware offers “vSphere FT” (VMWare, 2013) (Fault To-
lerant), which provides a solution to mirror calculati-
ons on one machine redundantly on a second virtual
machine in real time. If the active machine fails, the
backup machine takes over.
It should be noted that the failure of the first ma-
chine must be detected very quickly. Since the so-
lution is designed to meet the requirements of Enter-
prise IT, in which a few seconds of downtime can cost
thousands of dollars but not human lives, it must be
Opening up New Fail-safe Layers in Distributed Vehicle Computer Systems
101

carefully examined whether such technologies can be
used in an automotive application with safety-critical
software. In addition, the constant alignment of the
two machines requires a high communication band-
width, which, although not a problem in a server en-
vironment, is again subject to different requirements
(EMC) in the vehicle and cannot necessarily be gua-
ranteed. The strategy of machines running in lock-
step, however, offers a high degree of reliability under
certain conditions and time requirements. The deter-
mination of exact times and concrete measurements is
no longer part of this work, but will be carried out in
a follow-up examination.
Container-layer. There are also solutions at contai-
ner level, such as the open source orchestration tool
„Kubernetes“ developed by Google, which offers the
possibility of running applications in containers re-
dundantly. Containers can encapsulate the executa-
bles of the application and all dependencies without
sacrificing the performance of operating system vir-
tualization.
However, the disadvantage in terms of failover is
the lengthy detection of a failure, which is even lon-
ger than the VMware solution described above. In
general, the tool is more designed for scalability of
services and only offers good reliability mechanisms
at first glance. These are not applicable to future auto-
motive control units; however, the container concept
could well be used here in general, since they offer
a high degree of flexibility with simultaneous small
performance losses.
Application-layer. Concepts to ensure the reliabi-
lity of services at application level were also exa-
mined in the context of the work. Programming
languages (e.g. Erlang) or application frameworks
(e.g. Akka) with corresponding features are used. Ap-
plication developers use these features to distribute
the programs on a network of servers.
This offers the highest degree of flexibility and
fine granularity. Only those parts of a program that re-
ally need it can be designed redundantly. In addition,
the most reliable way to detect a failure is from the
application logic. However, the most capable develo-
pers are required for this. This type of programming
is perceived as particularly difficult, but is ultimately
the safest option.
4 CONCLUSION
In this paper, fail-safe mechanisms on different levels
of a distributed system were presented. The closer
these mechanisms are placed near the hardware, the
faster and safer a redundant configuration of several
processing units can be implemented. However, in
this case the flexibility decreases and the performance
overhead increases. The more application-specific a
redundancy mechanism is, the lighter and finer gra-
nular it can be.
However, redundancy alone is no guarantee for sa-
fety against failures, since failure detection cannot of-
fer sufficient coverage when not taking all system’s
layers into account. Therefore mechanisms to imple-
ment this safety measures within all layers of the fra-
mework have to be provided.
ACKNOWLEDGEMENT
The authors gratefully acknowledge the financial sup-
port by the Bavarian Ministry of Economic Affairs,
Energy and Technology, funding progamme “Infor-
mation and Communication Technology Bavaria” as
well as the support by project management organiza-
tion VDI/VDE Innovation + Technik GmbH.
REFERENCES
Conway, M. E. (1968). How do committees invent. Data-
mation, 14(4):28–31.
Doherty, P., Haslum, P., Heintz, F., Merz, T., Nyblom, P.,
Persson, T., and Wingman, B. (2004). A distributed
architecture for autonomous unmanned aerial vehicle
experimentation. In Distributed Autonomous Robotic
Systems 6, pages 233–242. Springer.
Mohallel, A. A., Bass, J. M., and Dehghantaha, A. (2016).
Experimenting with docker: Linux container and base
OS attack surfaces. In 2016 International Conference
on Information Society (i-Society), pages 17–21.
Reinhardt, D., Kühnhauser, W., Baumgarten, U., and Ku-
cera, M. (2016). Virtualisierung eingebetteter Echt-
zeitsysteme im Mehrkernbetrieb zur Partitionierung
sicherheitsrelevanter Fahrzeugsoftware. Universitäts-
verlag Ilmenau, Ilmenau. OCLC: 951392623.
VMWare (2013). Wie die Fault Tolerance funktionert.
Weckemann, K. (2014). Domänenübergreifende Anwen-
dungskommunikation im IP-basierten Fahrzeugbord-
netz. PhD thesis, lmu.
Xavier, M. G., Neves, M. V., Rossi, F. D., Ferreto, T. C.,
Lange, T., and De Rose, C. A. F. (2013). Performance
Evaluation of Container-Based Virtualization for High
Performance Computing Environments. pages 233–
240. IEEE.
PEC 2018 - International Conference on Pervasive and Embedded Computing
102
