
Steps Towards a Balance between Adequacy and Time Optimization in
Agent-based Simulations
A Practical Application of the Temporality Model Time Scheduling Approach
Tahina Ralitera, Nathan Aky, Denis Payet and R
´
emy Courdier
Laboratoire d’Informatique et de Math
´
ematiques, University of Reunion Island, France
Keywords:
Simulation Platform, Scheduler, Time Management, Temporality, Comparison, SimSKUAD.
Abstract:
Simulation models are often used as decision support tools. They intend to imitate real world complex phe-
nomena or processes. For this purpose, simulation platforms has the simulated models evolve by advancing a
virtual time. Thus, users could benefit from shorter, but relevant simulations. The simulated time is managed
by the scheduler and how this is done could significantly impact on the performance of the simulation plat-
form. However, conventional time scheduling approaches are still limited in some situations. The temporality
model approach was proposed as an interesting solution. It addresses a number of criteria that the classical
time scheduling approaches do not fulfil. In this paper, we first describe the fundamental of the temporality
model approach. Then, we implement it in a simulation model called the SKUADCityModel. Finally, we
show the performance advantages of this type of approach.
1 INTRODUCTION
Agent-Based simulation models are usually used as
decision support tools. They allow, for example, to
evaluate the possible consequences of real projects
before their implementation in the real world. For that
purpose, a simulation platform has a simulation mo-
del evolve following a virtual time. In general, this
virtual time progresses much faster than real time.
The simulation platform part that is responsible for
this virtual time management is called the schedu-
ler. This scheduler uses different approaches among
which the most commonly used are the time-stepped,
the event-driven and the mixed approaches.
We are interested in applications on personal com-
puters and in that case, conventional time scheduling
approaches may be inappropriate or may have limits
depending on the situation. These limits could affect
the performance of the simulation platform. To ad-
dress that, (Payet et al., 2006) proposed the “tempora-
lity model” approach. This approach intends to fulfil
a set of criteria that the classical approaches of sche-
duler do not meet. This paper clarifies the fundamen-
tals of this temporality model approach, presented in
an abstract way in (Payet et al., 2006) and proposes a
practical application of it.
A set of requirements that we think an agent-based
simulation scheduler should meet are listed in the next
section. Then, we talk about the most commonly used
time scheduling approaches and their limits. Next, we
describe the temporality model approach and the per-
formance advantages of this type of scheduler appro-
ach. Finally, we end with a practical implementation.
2 RELATED WORK
2.1 Requirements
(Payet et al., 2006) list a set of requirements that a
scheduler should meet to be reasonably fit for multi-
agent simulations:
1. Take into Account the Specificities of the Simu-
lated Model (Helleboogh et al., 2004):
Models can take various and complex forms. It
would be unrealistic to believe that a time ma-
nagement approach could work properly without
any consideration of these simulated model featu-
res.
2. Take into Account the Experimental Con-
straints:
A simulation often implies a shorter execution
time than real time. Thus, depending on the com-
plexity of the simulated model, the user can be
160
Ralitera, T., Aky, N., Payet, D. and Courdier, R.
Steps Towards a Balance between Adequacy and Time Optimization in Agent-based Simulations - A Practical Application of the Temporality Model Time Scheduling Approach.
DOI: 10.5220/0006904601600166
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 160-166
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

forced to reduce the simulation execution time by
constraining the simulation platform. The more
these constraints are stronger the less precise the
results are. However, it is better than not getting
any results at all.
3. Establish a Homogeneous Management of
Time:
Sometimes the user needs a flexible time sche-
duling approach that could adapt to time-stepped
and to pure event-driven simulation contexts. In
that way, all the results are obtained on the same
experimental basis and can be compared (Axtell,
2000).
4. Handle a Cumulative Characterization of
Time:
Multidisciplinary complex phenomena simulation
models could be developed by several modelers.
Most of the time, none of these modelers have the
full control over the model. Thus, it will be inte-
resting to have a cumulative time scheduling that
can be partially defined by each modeler, while
remaining coherent.
5. Handle an Incremental Complexity:
Currently, we manage to obtain complex structu-
ral and behavioural description models. However
the time management is still basic. Consequently,
the simulation results seem to be limited at a le-
vel that time dimension does not allow to cross
(Amblard and Dumoulin, 2004). Thus, it could be
interesting to have a time scheduling mechanism
that could handle an incremental complexity.
6. Minimize the Impact on the Execution Perfor-
mance:
In our case, a good scheduling mechanism should
work properly with the available computing po-
wer on personal computers.
In the following subsections, we describe the three
most used types of scheduler approaches and how
they fail to address some of these requirements.
2.2 The Time-stepped Approach
Because of its ease of implementation, the time-
stepped approach is the most used approach in the
agent-based simulations. In this approach, the sche-
duler advances the simulation time by incrementing
its value by a fixed duration ∆t called time-step (Fu-
jimoto, 1998). The simulated time can be represen-
ted by an axis that is discretized by fixed intervals (fi-
gure 1). With each time-step, all the simulation activi-
ties (agent cycle and possibly objects simulation) are
completed before advancing to the next step.
Figure 1: Time axis for time-stepped approaches.
This approach is usually easy to set up. Also, it is
convenient for one specific model composed of agents
that have homogeneous behaviour and the same acti-
vation frequency. However, it becomes unsatisfactory
in the case of highly heterogeneous agents’ behaviour.
Indeed, using an inappropriate time step value can
lead to lethargic or overactive agents. On one hand,
if the agent is activated too infrequently, his actions
seem slowed. On the other hand, if the agent is activa-
ted too often, his actions seem accelerated. The both
cases may lead to erroneous simulation results.
To address that, a solution consists in setting a
time step value that is equal to the smallest time inter-
val required. Then, to avoid hyperactivity, the agents
that require a bigger time step value have to explicitly
become inactive during the intermediate time steps
that are not relevant for them. The opposite appro-
ach is not possible. Indeed, an agent can slow down
his activity, but he does not have the possibility of
acting at a smaller granularity than that imposed by
the scheduler. Consequently, when only a very small
number of agents need a small time step value, the
majority of the agents spend most of their time to be-
come inactive. (Michel, 2004) concludes that using a
regular discretization of time is unsatisfactory when
the simulated model needs to take highly heterogene-
ous agent actions (from the frequency point of view)
into account.
To summarize, this approach does not take the
specificity of any simulated model into account.
2.3 The Event-driven Approach
In this approach, the simulation axis is continuous but
the state of the system changes discretely at precise
time called events (Anagnostou et al., ). An event can
be defined as the description of the agents’ behavi-
our activation conditions at a particular time. Its rele-
ase date can be calculated depending on the nature of
these conditions. Thus, the simulation consists in exe-
cuting an orderly list of events. The time axis can be
represented by a chained event list that are not equit-
ably spaced (figure 2).
This approach is suitable in case of highly hete-
rogeneous agents. However, the user of the platform
does not have any control over the simulated time. He
is not able to force the simulator to reduce the simu-
lation execution time. However, for large-scale simu-
Steps Towards a Balance between Adequacy and Time Optimization in Agent-based Simulations - A Practical Application of the
Temporality Model Time Scheduling Approach
161
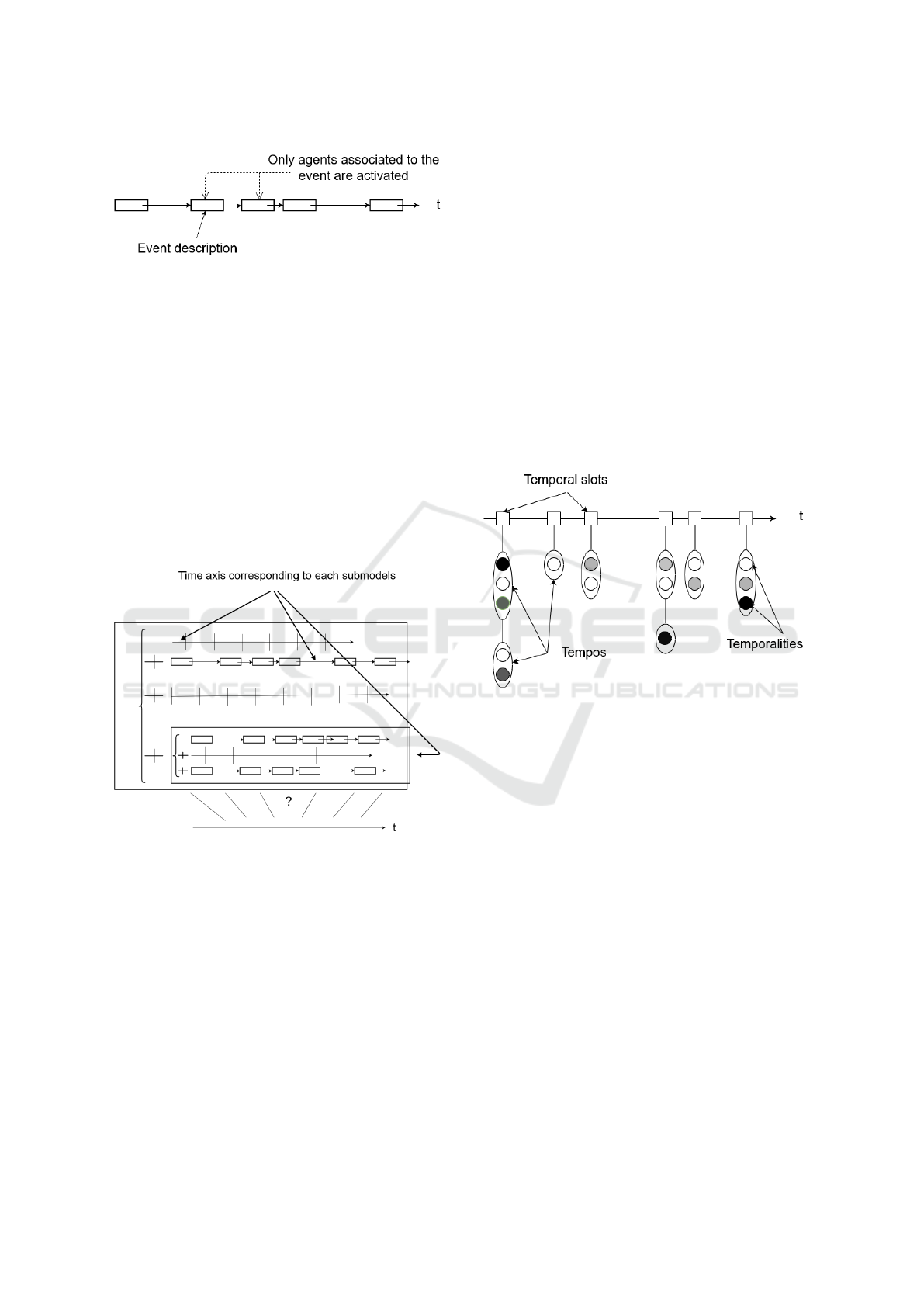
Figure 2: Time axis for event-driven approaches.
lations, this possibility of making compromises is es-
sential.
Moreover, the simulated time can take very com-
plex forms. Thus, the calculations made by the simu-
lator can be rather substantial. Consequently, it could
require lots of computational power.
2.4 The Mixed Approach
The mixed approaches propose to split the simulated
model into sub-models. To each sub-model is asso-
ciated the most appropriate type of scheduler. The
resulting time management system is the combina-
tion of the different chosen schedulers. Consequently,
there is no global time axis (figure 3).
Figure 3: Time axis for mixed approaches.
This lack of global vision is a limit if we want to
make analysis of the simulation time. Moreover, any
attempt to influence the simulated time structure in
order to reduce the execution time duration is prohi-
bited.
2.5 The Temporality Model Approach
In multi-agent systems, an agent typically has some
autonomy over the characterization of its state and its
behaviour. In the same way, in the temporality mo-
del approach, the agent describes its own activation ti-
mes itself. This kind of scheduler is focused on needs
which are directly expressed by the agents.
The agents needs are expressed using a data struc-
ture called “the temporality”.
A temporality t specifies a point on the time axis
where an agent wants to be activated. t can be defined
by the tuple (Payet et al., 2006):
t = {id, d, f , p, v} (1)
where:
• id is the identifier of the temporality.
• [d, f ] is the time interval during which the tempo-
rality can be activated.
• [p] is the time period, i.e. the time interval bet-
ween two executions of this temporality (p = 0 if
the action is only executed once).
• v is the variability. It defines the accuracy below
which the temporal occurence remains valid.
Figure 4: Time axis for the temporality model approach.
The agents behaviour activation time is equal to x =
d + p ∗ k, where k is an integer such as 0 ≤ k ≤ n and
n is the biggest integer that verifies (d + p ∗ n) = f
(Payet et al., 2006).
The agents define their temporalities during the si-
mulation initialization. Afterward, they will be able to
redefine or create new temporalities any time. In that
case, the scheduler immediately processes the creati-
ons and modifications, then updates the time axis.
One particularity of the temporality model ap-
proach is the ability to allow the user to influence
the simulated time structure by adding time con-
straints. These time constraints are the minimum
time-step, the default time period and the variability.
• The minimum time-step ∆t
min
, indicates that two
distinct activation dates should be separated by a
duration at least equal to the value of ∆t
min
. If
such a situation occurs during the analysis of the
temporalities, the scheduler will use the variabi-
lity parameter v of each of the temporalities to
determine if they should be separated from each
other or grouped together on the same date.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
162

• The default time period value that is used by
agents that do not define any temporalities during
the initialization of the simulation.
The scheduler processes the temporalities using
two data structures (see figure 4):
• The temporal slot: a precise time when the sche-
duler must activate the agent’s behaviour.
• The tempo: a set of temporalities which are loca-
ted on the same time slot and which have the same
time period. This time period characterizes the
tempo. It means that all the temporalities it con-
tains have the same activation rhythm. The sche-
duler advances the simulated time from a time slot
to another. At each time slot, all the tempos are
processed. That produces the execution of all the
behaviours associated with the temporalities they
contain.
(Payet et al., 2006) propose the temporality model
as a solution that fulfil the criteria cited in section 2.1:
1. By definition, the temporality model approach is
based on the specificity of the simulated model.
2. The temporality model approach allows the user
to influence the simulated time structure by ad-
ding time constraints. This is done by varying the
minimum time step, the default period and the va-
riability.
3. This approach allows for fine management of
complex agents in term of diversity of activation
rhythm, but does not complicate the simple agents
management. The simple agents do not have to
define any temporality and the system will auto-
matically assign them a default one (defined at the
beginning by the user). Thus, in the extreme ca-
ses, on one hand, if no agent defines a temporality,
we automatically fall back into a time-stepped ap-
proach. On the other hand, if all the agents are
complex and express a large number of tempo-
ralities, we end up with an event-driven type of
scheduling.
4. For complex agents, the writing of the behavior
can be done by different developers (Each speci-
alist in his field). How then determine the glo-
bal temporal operating mode of the agent? Who
has the competence? The granularity of the tem-
porality model approach is the activities. Conse-
quently, each developer participates in the defini-
tion of the temporality of the agent as for the defi-
nition of its behavior.
5. In this approach, the agents temporal needs are
expressed at the level of the agents’ activities. It
is possible to relate a specific temporality with
each distinct activity. Also, the complexity of
these temporalities can be accentuated at the same
time that the behavior to which they are attached
is made even more complex. Thus, this appro-
ach supports an incremental complexification in
the same way as that which can be achieved at the
level of writing the agents’ behavior.
6. A way to implement a temporal model is the use
of time slots and tempos. These can take the form
of a linked list that manages the simulated time
and that determine the agents’ activation time. As
we have experienced, and as has been shown by
(Lawson and Park, 2000), such a data structure
can be optimized with the algorithms of (Henrik-
sen, 1983) so the resulting execution time remains
around that of the time stepped approach.
(Payet et al., 2006) use assumptions and illustra-
tive examples to demonstrate the advantages of the
use of the temporality model approach. They made a
comparative study between the different classical ap-
proaches and the temporality model. In this article,
we support their demonstration with a practical appli-
cation.
3 CASE STUDY
The proposed case study is about agent-based simula-
tion of individual transport. This is done for the city
of Saint-Denis, capital of Reunion Island, a French
island in the Indian Ocean.
In this simulation model, agents are vehicle ow-
ners. The model uses activity-based approach so
agents move from a place to another following their
activity schedule. Thus, travels result from personal
activities (work, shopping, leisure, going home) that
individuals need or wish to perform.
3.1 The Agent Model
In our simulation model, an agent is a vehicle owner.
His goal is to achieve all his activities using the vehi-
cle at his disposal. The activity profile AP
i
for each
group i of vehicle owners is defined with a list of 3-
tuples:
AP
i
= (ACT
j
, MDT
j
, PD
j
) (2)
Where ACT
j
represents the activity j, MDT
j
the mean
departure time, and PD
j
the probability of departure
for the activity j.
Steps Towards a Balance between Adequacy and Time Optimization in Agent-based Simulations - A Practical Application of the
Temporality Model Time Scheduling Approach
163

3.2 The Environment Modeling
Elements
The environment in which the agents are situated and
act is represented by a collection of entities. These
entities represent fragments of the real environment.
Its definition is done using Geographic Information
System (GIS) composed of the following layers:
• The building layer that is a set of polygon entities
and that represents administrative boundaries.
• The road layer that is composed of polyline en-
tities and that represents the road network along
which the agents move.
• The areas of interests layers, represented by poly-
gon or point entities. They represent the location
of the home, the workplace, the leisure, the com-
mercial or the industrial places.
The simulation model takes shape files and statistical
data as input. They are used at the different level of
the simulation model such as for environment model-
ling or for the calculation of the population distribu-
tion.
In the following sections we will show how we
built this simulation model upon the SimSKUAD si-
mulation platform.
4 THE SKUADCityModel
4.1 SKUAD
SKUAD stands for “Software Kit for Ubiquitous
Agent Development”. This free multi-platform tool-
kit is still being developed. It allows us to create
multi-agent systems using Java language. It has been
developed since 2013 by the Collective Adaptive Sys-
tems Research Group in the Laboratory of Mathema-
tics and Computer Science (LIM) at the University of
Reunion Island. The idea comes from the observation
of the outburst of the Internet of Things, and the ne-
cessity to have a software that can make this mass of
objects more consistent. For that purpose, SKUAD
can operate in an ambient (agents can operate in our
real environment) and in a simulated mode.
4.2 The SimSKUAD Simulation
Platform
The SimSKUAD is the simulated operating mode of
SKUAD. In this mode, the agents evolve following a
simulated time. Devices constituting the agent’s en-
vironment are virtual. The SimSKUAD uses the tem-
porality model as a default time scheduling approach.
However, its architecture is flexible enough to allow
us to easily replace the scheduler. Thus, we were also
able to implement the time-stepped approach.
Different optional modules have already been de-
veloped for SimSKUAD. Examples are Mod2D allo-
wing agents simulations in a continuous space envi-
ronment or ModGrid which allowing agents simulati-
ons in a discrete space environment. More details can
be found on the SKUAD website (Payet, 2018).
In this paper, we focus in a module called Mod-
GIS that allows agents to evolve in Geographical In-
formation System (GIS) kind of environment. For
that, ModGIS uses the GeoTools library (Turton,
2008).
The SKUADCityModel is built upon the ModGIS
module of the SimSKUAD simulation platform. In
our experiments, we implemented two different types
of scheduler: a time-stepped approach and a tempora-
lity model approach. In the next section, we compare
the experimental results obtained from these two ty-
pes of approaches.
5 COMPARISON OF THE
DIFFERENT APPROACHES
In this section, we illustrate the advantages of the tem-
porality model approach against classical approaches
by experiments on the SKUADCityModel. For that
purpose, we make two types of manipulations:
• The first manipulation is to vary the experimen-
tal constraints (time step duration and the vari-
ability) from 0% to 100%. In this way, we show
how the simulation duration can be reduced de-
pending on the used time scheduling approach.
• The second one is a scaling up test. For that pur-
pose, we vary the number of agents from 1000 to
10,000 moving moving over simulated 12 hours.
In this way, we show how the simulation model
can scale up depending on the used time schedu-
ler approach.
Remark: We chose to not make implementation
of the event-driven or the mixed approaches because
they are not appropriate if we want the users to have
control over the simulated time (see section 2.1).
For this experiment, we run the two simulation
models on a personal computer with the following
configuration : fifth generation Intel core i5, 16 gi-
gabytes of RAM, Solid State Drive.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
164

Figure 5: Execution duration performance of each schedu-
ling mode for 1000 then 10000 agents.
Figure 5 shows the results of the first experiments
we carried.
First, in the case where no experimental constraint
is applied (0%) and for 1000 agents, we can see
that the simulation execution durations are almost the
same for the two approaches. However, when we vary
the experimental constraints (50%, 100%), we can see
a sharp decrease of the simulation execution duration.
This decrease is greater in case of the use of the tem-
porality model approach.
Second, we note a difficulty of scaling up in case
of the time-stepped approach. Indeed, the results
show that when using the time-stepped approach, the
maximum number of agents supported by the SKU-
ADCityModel does not exceed 10,000. In the figure
5, the yellow curve on 0ms indicates a crash due to
an out of memory error. This is a problem we do not
encounter, at least up to 10,000 agents, when we use
the temporality model approach.
Finally, the performances remain acceptable and
the simulation execution times are less than five mi-
nutes. These results are in line with the demonstra-
tions made in (Payet et al., 2006). That shows the
performance advantages of this type of scheduler ap-
proach. Especially, it allows the user to have control
over the simulated time. Moreover, it allows to scale
while maintaining acceptable performance.
6 CONCLUSION AND FURTHER
WORK
Agents scheduling management is a critical process in
simulation platforms. Unfortunately, all the conventi-
onal approaches have limits in some situations. From
case to case, these limits could be very restrictive.
(Payet et al., 2006) proposes the temporality model
approach as a possible solution that addresses some
of these limits. They demonstrate that by illustrative
examples based on theoretical assumptions.
In this paper, we show that the temporality model
meets requirements that we think agent-based simu-
lation of urban and transport system should fulfil:
• It takes into account the specificities of the si-
mulated model and can automatically adapt to
them. Indeed, in the case of homogeneous agents,
the temporality model works like a time-stepped
approach. In the case of highly heterogeneous
agents, it works like an event-driven approach.
• It takes into account the experimental con-
straints as it allows to vary a set of parameters in
order to shorten the simulation execution duration
for example.
• It ensures a homogeneous management and
acumulative characterization of time because
all the agents’ actions are based on the same vir-
tual timeline.
• It activates agents who need to be awake only
when they need to be. Consequently, it handles
an incremental complexity and minimizes the
impact on the execution performance.
We support these assumptions with practical appli-
cations. For that, we implemented the time-stepped
approach and the temporality approach in a same si-
mulation model called the SKUADCityModel. Then,
we compared the two implementations based on the
execution time performance and the ability of the si-
mulation model to scale.
The results are in agreement with the theoretical
demonstrations that have already been made in (Payet
et al., 2006). In our experiments, we used the Sim-
SKUAD simulation platform, that is still under deve-
lopment and that has an architecture that seems to be
different compared to classic agent-based simulation
platform. As further work, it could be interesting to
see if the architecture of the SimSKUAD simulation
platform also affects the performance of the simula-
tion.
The demonstration done in this paper is limited to
a comparison with the classical time management ap-
proaches. However, the relevance of the temporality
model approach should be further assessed with more
advanced mechanisms such as the time-stepped load
balancing approach described in (Wu et al., 2015) In
addition, it would be interesting to increase the perfor-
mance already obtained using the GPU calculation, as
proposed in the paper (Song et al., 2017).
ACKNOWLEDGEMENTS
The research in this paper was supported by the
R
´
egion R
´
eunion, the L’Or
´
eal-UNESCO for women in
Steps Towards a Balance between Adequacy and Time Optimization in Agent-based Simulations - A Practical Application of the
Temporality Model Time Scheduling Approach
165

science fellowship and the town of Saint-Denis. The
authors thank the reviewers for their comments.
REFERENCES
Amblard, F. and Dumoulin, N. (2004). Mieux prendre
en compte le temps dans les simulations individus-
centr
´
ees. 11
`
emes Journ
´
ees de Rochebrune, pages 13–
26.
Anagnostou, A., Meskarian, R., Robertson, D., and Fak-
himi, M. Introduction to discrete-event simulation:
how it works. In Welcome to the 2018 Operational Re-
search Society Simulation Workshop (SW18), page 13.
Axtell, R. L. (2000). Effects of interaction topology and
activation regime in several multi-agent systems. In
Multi-Agent-Based Simulation, Second International
Workshop, MABS 2000, Boston, MA, USA, July, 2000,
Revised and Additional Papers, pages 33–48.
Fujimoto, R. M. (1998). Time management in the high level
architecture. Simulation, 71(6):388–400.
Helleboogh, A., Holvoet, T., Weyns, D., and Berbers,
Y. (2004). Extending time management support for
multi-agent systems. In Multi-Agent and Multi-Agent-
Based Simulation, Joint Workshop MABS 2004, New
York, NY, USA, July 19, 2004, Revised Selected Pa-
pers, pages 37–48.
Henriksen, J. O. (1983). Event list management - a tutorial.
In Proceedings of the 15th conference on Winter si-
mulation, WSC 1983, Arlington, VA, USA, December
12-14, 1983, pages 543–551.
Lawson, B. G. and Park, S. (2000). Asynchronous time
evolution in an artificial society model. J. Artificial
Societies and Social Simulation, 3(1).
Michel, F. (2004). Formalisme, outils et
´
el
´
ements
m
´
ethodologiques pour la mod
´
elisation et la simula-
tion multi-agents. (Formalism, tools and methodologi-
cal elements for the modeling and simulation of multi-
agents systems). PhD thesis, Montpellier 2 University,
France.
Payet, D. (2018). Official website of skuad. http://skuad.
onover.top/, Last accessed on 2018-15-07.
Payet, D., Courdier, R., Ralambondrainy, T., and S
´
ebastien,
N. (2006). Le mod
`
ele
`
a temporalit
´
e: pour un
´
equilibre
entre ad
´
equation et optimisation du temps dans les si-
mulations agent. In Systemes Multi-Agents, Articula-
tion entre l’individuel et le collectif - JFSMA 2006 -
Quatorzieme journees francophones sur les systemes
multi-agents, Annecy, France, October 18-20, 2006,
pages 63–76.
Song, X., Xie, Z., Xu, Y., Tan, G., Tang, W., Bi, J., and Li,
X. (2017). Supporting real-world network-oriented
mesoscopic traffic simulation on GPU. Simulation
Modelling Practice and Theory, 74:46–63.
Turton, I. (2008). Open Source Approaches in Spatial Data
Handling. Springer, Berlin, Heidelberg.
Wu, Y., Song, X., and Gong, G. (2015). Real-time load ba-
lancing scheduling algorithm for periodic simulation
models. Simulation Modelling Practice and Theory,
52:123–134.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
166
