
Coevolutionary Algorithm for Multivariable Discrete Linear
Time-variant System Identification
Alexander E. Robles and Mateus Giesbrecht
School of Electrical and Computer Engineering, University of Campinas, Av. Albert Einstein 400, Campinas - SP, Brazil
Keywords:
Evolutionary Algorithms, Coevolutionary Algorithms, System Identification, Time-variant System Identifica-
tion.
Abstract:
A significant part of the works in system identification is focused on time-invariant dynamic systems. How-
ever, most of systems in the real applications have nonlinear and time variant behavior. In this paper, we
present a multivariable time-variant identification method based on a paradigm in the field of evolutionary
algorithms: The coevolutionary algorithm. This new method focuses on the relationship between the fitness of
an individual in relation to the fitness of the other individuals (or group of individuals), based on the principle
of the selective pressure, that is part of the evolutionary process. A brief comparison between a multivariable
deterministic identification method MOESP-VAR and the proposed coevolutionary method is shown. From
the results it is possible to notice that the proposed method presents an accuracy higher than the obtained with
the deterministic identification method.
1 INTRODUCTION
System identification consists on finding the math-
ematical models that can describe dynamic systems
behavior, from observed input-output data (Ljung,
1999). A significant part of activities and researches
in system identification focuses on time-invariant dy-
namic systems. However, there are innumerable sys-
tems in nature that are multivariable with nonlinear
and time-varying behavior. To deal with last problem,
many of the time-varying systems are approximated
by linear time-invariant systems, as long as these sys-
tems vary slowly (Tamariz et al., 2005). In some cases
these approximations cannot describe the real variant
system behavior, so that the magnitude of the error be-
tween output data and output model is considerable.
The main focus of this paper is to present an
evolutionary method to identify multivariable time-
varying system (MTVS). For decades evolutionary
algorithms (EAs) have been applied in optimization
problems with successful results. Moreover, system
identification area had one of its first applications in
(Rodrigues-Vasquez and Fleming, 2004) when a clas-
sical genetic algorithm is applied to identify the pa-
rameters of the transfer function of a two masses res-
onant system. In (Wakizono and Uosaki, 2006) an ap-
proach for identifying linear and non-linear systems
based on CLONALG algorithm (De Castro and Von
Zuben, 2002) was proposed. Other recent work is
(Giesbrecht and Bottura, 2015), in which an immuno-
inspired algorithm was develop to identify MTVS. In
that reference, the MTVS identification problem is
defined as an optimization problem, where a search
space is created by all possible matrices quadru-
ples A,B,C, D that represent the MTVS in state-space
model for a given time interval. Furthermore, each
state-space model is seen as a point that minimizes the
error between the system and the model outputs to the
same input signal. In this paper, those principles were
used to develop the coevolutionary algorithm (COEA)
that can be applied to MTVS identification problem.
In this work, some comparisons are made between
implemented COEA and deterministic method called
MOESP-VAR (Tamariz et al., 2005), based on Multi-
variable Output-Error State sPace (MOESP) (Verhae-
gen and Dewilde, 1992). A genetic algorithm (GA)
also was implement using the same parameters and
operators used for COEA, but the populations do not
evolve together. Trying to show the effectiveness of
evolutionary processes, it was developed a random
search (RS), that performs a searching without any
evolutionary intelligence behind.
The paper is organized as follows. In the next sec-
tion, subspace methods for system identification are
introduced. In the section 3, the coevolutionary algo-
rithms are briefly detailed. Section 4 describes COEA
to identify MTVS, where the coevolution is the main
topic. In the section 5 the results of the application
290
Robles, A. and Giesbrecht, M.
Coevolutionary Algorithm for Multivariable Discrete Linear Time-variant System Identification.
DOI: 10.5220/0006907602900295
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 1, pages 290-295
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of the proposed method to identify a discrete slowly
time-varying benchmark are shown. In the same sec-
tion we compare COEA with other approaches such
as GA, RS, and MOESP-VAR method. Finally, in
the section 6, the conclusions of this paper and future
works are exposed.
2 SUBSPACE METHODS FOR
SYSTEM IDENTIFICATION
2.1 State-space Models
A multivariable system can be modeled in state-
space representation. The discrete multivariable time-
invariant system is defined in state-space model as fol-
lows:
x(k + 1) = Ax(k) + Bu(k)
y(k) = Cx(k) + Du(k)
(1)
Where x(k) ∈ R
n
is defined as the system state at
instant k, A ∈ R
nXn
is the state transition or system
matrix, B ∈ R
nXm
is a matrix that relates the input
u(k) ∈ R
m
to the state, C ∈ R
lXn
is the matrix that
relates the output y(k) ∈ R
l
to the state and D ∈ R
lXm
is the matrix that relates the outputs to the inputs
(Katayama, 2005), (Ljung, 1999).
2.2 Subspace Methods for System
Identification
Multivariable discrete system identification using
subspace methods allows finding a causal time-
invariant model (1). The model is estimated just from
system outputs and inputs. The main advantage of
this approach is that a MIMO system can be mod-
eled even if the system order is unknown a priori.
There are well known subspace methods to address
the time-invariant MIMO system identification such
as MOESP and N4SID. The MOESP method (Ver-
haegen and Dewilde, 1992) is based on the LQ de-
composition of Hankel matrix formed from input-
output data, where L is lower triangular and Q is or-
thogonal. A Singular Value Decomposition (SVD)
can be performed on a block from the L matrix to
obtain the system order and the extended observabil-
ity matrix. From this matrix it is possible to estimate
the matrices C and A of model (1). The final step
is to solve overdetermined linear equations using the
least-squares method to estimate matrices B and D,
for more details see (Giesbrecht and Bottura, 2015).
Another method is N4SID (Numerical Algo-
rithms for Subspace State Space System Identifica-
tion) (Overschee and Moor., 1994). The method stars
with the oblique projection of the future outputs to
past inputs and outputs into the future inputs direc-
tion. The second step is to apply the LQ decomposi-
tion and then the state vector can be computed by the
SVD. Finally, it is possible to compute the matrices
A,B,C and D by using the least-squares method.
2.3 Time-varying Systems
Most of the systems in real environments are nonlin-
ear and time-variant, so the complexity of the system
identification problem increases. Time-varying sys-
tems can be modeled in state-space as shown in (2),
where the matrices A, B,C, D depend on k, that repre-
sents the time.
x(k + 1) = A(k)x(k) + B(k)u(k)
y(k) = C(k)x(k) + D(k)u(k)
(2)
There is a MOESP type method called MOESP-
VAR. This method was develop in (Tamariz et al.,
2005). Given a slowly time-varying system, the al-
gorithm starts splitting up the output-input data into
intervals defined as windows. Then, the MOESP al-
gorithm is applied to each window and the matrices
A,B,C,D are estimated. If the system presents a fast
variation, the MOESP-VAR algorithm has poor ac-
curacy. Another disadvantage is that the matrix de-
compositions used in the subspace methods is limited
by the size of window data, in other words a greater
amount of data is needed in order to make new meth-
ods are computationally feasible. For this case, tech-
niques based on EAs can be used as an alternative, as
proposed in (Giesbrecht and Bottura, 2015).
3 SYSTEM IDENTIFICATION
PROBLEM AS A
OPTIMIZATION PROBLEM
The identification of time variant systems can be de-
fined as an optimization problem if a space of state
space models is defined. The space contains all possi-
ble quadruples of matrices, the dimensions of matri-
ces being known a priori. Each model in the state
space is seen as a point in this space, also called
search space. The main idea is to find the point that
minimizes the error between the model and system
outputs generated from the same input. This point
also changes over time, that is, another quadrupling
of matrices must be estimated.
EAs can adapt well to this optimization problem.
For larger system variations over time, the algorithm
Coevolutionary Algorithm for Multivariable Discrete Linear Time-variant System Identification
291

should look for a new, four-point point that minimizes
the estimation error. Based on this principle the CO-
EAs were developed in this paper. In an illustrative
way, the optimization problem can be defined as fol-
lows:
Exists X
i
∈ R
(n+p)X (n+m)
:
X
i
=
A
i
B
i
C
i
D
i
(3)
The estimation error E(X
i
) is calculated in equa-
tion 4 and the fitness function f (X
i
) is defined in
equation 5. Where y(k) is the system output, ˆy(k)
is the model output (estimated by evolutionary algo-
rithm) and N is the data size.
E(X
i
) =
N
∑
k=1
||(y(k) − ˆy(k))|| (4)
f (X
i
) =
1
1 + E(X
i
)
(5)
There is a x
∗
i
which minimizes error, this concept
taken to the fitness function, means to maximize the
fitness function and is defined: x
∗
i
→ max( f (x
∗
i
)). The
equation 5, can be modified or changed, this is an-
other advantage of the EAs, which does not restrict
the ways of creating a new fitness function.
4 COEVOLUTIONARY
ALGORITHMS
Coevolutionary algorithms (COEAs) are heuristic
methods based on cooperation and competition.
Moreover, coevolution is strongly associated with a
mutual evolution between two species, so that one ex-
erts selective evolutionary pressure on the other, thus
creating a paradigm: there is no isolated evolution.
More detailed information regarding this subject can
be found in the reference (Wiegand, 2003).
There are three categories that might benefit from
coevolution: problems with large (infinite) Cartesian-
product spaces, problems with no intrinsic objective
measure, and problems with complex structures. The
intent of coevolution is to produce a typical dynamic
refereed as an arms race. The idea is that continued
small adaptations in some individuals (or populations)
will force competitive adaptations in others. Con-
sider the predator-prey systems: if the prey evolves
to run faster; then the predator population is forced
to develop better attacking strategies (such as power-
ful claws). Therefore, the expectation is that, as the
processes evolves, both populations will present ex-
ceptional attributes (Wiegand, 2003).
Another concept, used in this work, is the cooper-
ative. In a context in which a large problem is very
complex to solve, it may be possible to divide the
problem into subcomponents and to solve each one
of them independently. The subcomponents are also
defined as subpopulations and the only interaction be-
tween subpopulations is in the cooperative evaluation
of each individual of this subpopulations. This is done
by concatenating the current individual with the best
individuals from the rest of the other subpopulations,
as described by (Potter and Jong, 2000).
Indeed, the advantages of the coevolution led this
kind of technique to be applied in a large variety
of complex problems. Optimization applications in-
clude the coevolution of fast, complete sorting net-
works (Hillis, 1991) and the coevolution of maximal
arguments for complex functions (Potter and Jong,
1994). Machine learning applications include COEAs
to search for useful game-playing strategies (Rosin
and Belew, 1996).
5 COEVOLUTIONARY
ALGORITHM TO SYSTEM
IDENTIFICATION
Based on the principles of cooperative coevolution, in
this work a COEA was develop to identify MTVS. To
initialize the algorithm four populations were created:
P
A
, P
B
, P
C
and P
D
, that are related to the matrices A, B,
C and D from the state-space model (2), respectively.
Notice that these matrices are not constant.
The individual objective of the populations is to
find the configuration of their associated state matri-
ces, that minimizes the estimation error between the
model outputs
ˆ
Y and the actual system outputs Y to
the same given input set U . The search space for each
state-space matrix (2) is M
A
∈ R
nXn
,M
B
∈ R
nXm
,M
C
∈
R
lXn
, M
D
∈ R
lXm
. The populations belong to those
search spaces.
In the following subsections the adopted coding,
operators, the fitness function and the structure of al-
gorithm are introduced.
5.1 Adopted Coding
The candidate solutions of each population is rep-
resented as follows: P
A
has nXn elements, P
B
has
nXm elements, P
C
has lX n elements P
D
has lX m el-
ements. The columns of each state-space matrix are
transformed to rows and concatenated. This coding is
shown for P
A
in the table 1. The other matrices follow
the same coding.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
292
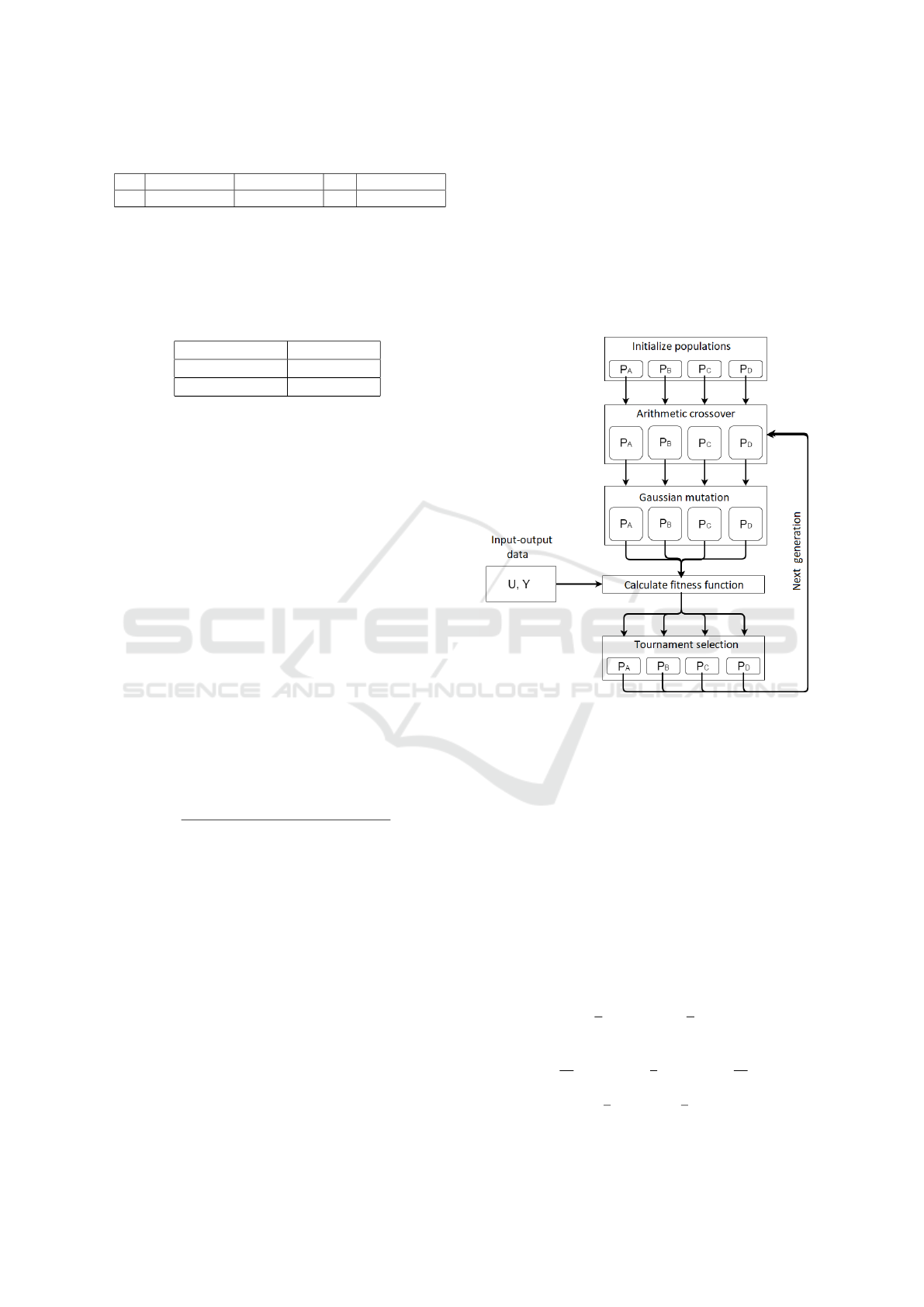
Table 1: Configuration of P
A
chromosome.
a
1→n,1
a
1→n,2
··· a
1→n,n
P
A
(a
1,1
→ a
n,1
) (a
1,2
→ a
n,2
) ··· (a
1,n
→ a
n,n
)
5.2 Operators
The four populations P
A
, P
B
, P
C
and P
D
used the same
operators, which are shown in the table 2.
Table 2: Operators.
Recombination Arithmetic
Mutation Gaussian
Selection Tournament
In the mutation, the value of the variance depends
on the number of generations, see 3. This approach
was inspired by the simulated annealing (Kirkpatrick
et al., 1983), where it is desired that individuals have
greater freedom to explore the search space during
the first generations. As the generations (g) pass, the
freedom of exploration should be reduced, to encour-
age individuals to refine the candidate solutions pre-
viously encountered. In the original simulated an-
nealing, the decay of this exploration factor (called
temperature T ) acts on the selection of individuals,
whereas in this work it acts on the mutation of in-
dividuals, generating a reduction in the intensity of
mutations over time.
The reduced value of individuals for tournament
selection, generates low selective pressure in the pop-
ulation, as a consequence, allows low fitness individ-
uals have a high chance to survive.
5.3 Fitness Function
The fitness function is defined as follows:
f (p
(A,i)
) =
1
1 + E(p
(A,i)
, p
t
(B,r
1
), p
(C,r
2
)
, p
(D,r
3
)
)
,
(6)
Where individual p
(x,i)
of population x, in last
equation (6) corresponds to P
A
. Also, r
1
, r
2
and r
3
are random individuals extracted from the others pop-
ulations. The function E represents the total error be-
tween the model outputs ˆy(k) estimated from these
individuals and the system outputs y(k), where n is
the total number of data samples set to be considered.
This function is defined as follows:
E(p
(A,i)
, p
(B,r
1
)
, p
(C,r
2
)
, p
(D,r
3
)
) =
n
∑
k=1
||(y(k) − ˆy(k)||
(7)
5.4 Structure
The first step is to initialize randomly the individuals
from each population. The number of candidate solu-
tions that are selected for mutation and recombination
has deterministic behavior, in which 75% of the pop-
ulation is selected for the crossover, while 25% of the
individuals undergo mutation. Then, the fitness of the
individuals is calculated. Finally, the step of selection
is made. All steps are shown in Figure 1.
Figure 1: Algorithms steps.
6 RESULTS
In the following example the algorithm proposed in
this paper was applied to identify a slowly time-
varying system. A bi-dimensional white noise with
N = 1000 samples was given as input. The parame-
ters of the algorithm were configured as shown in the
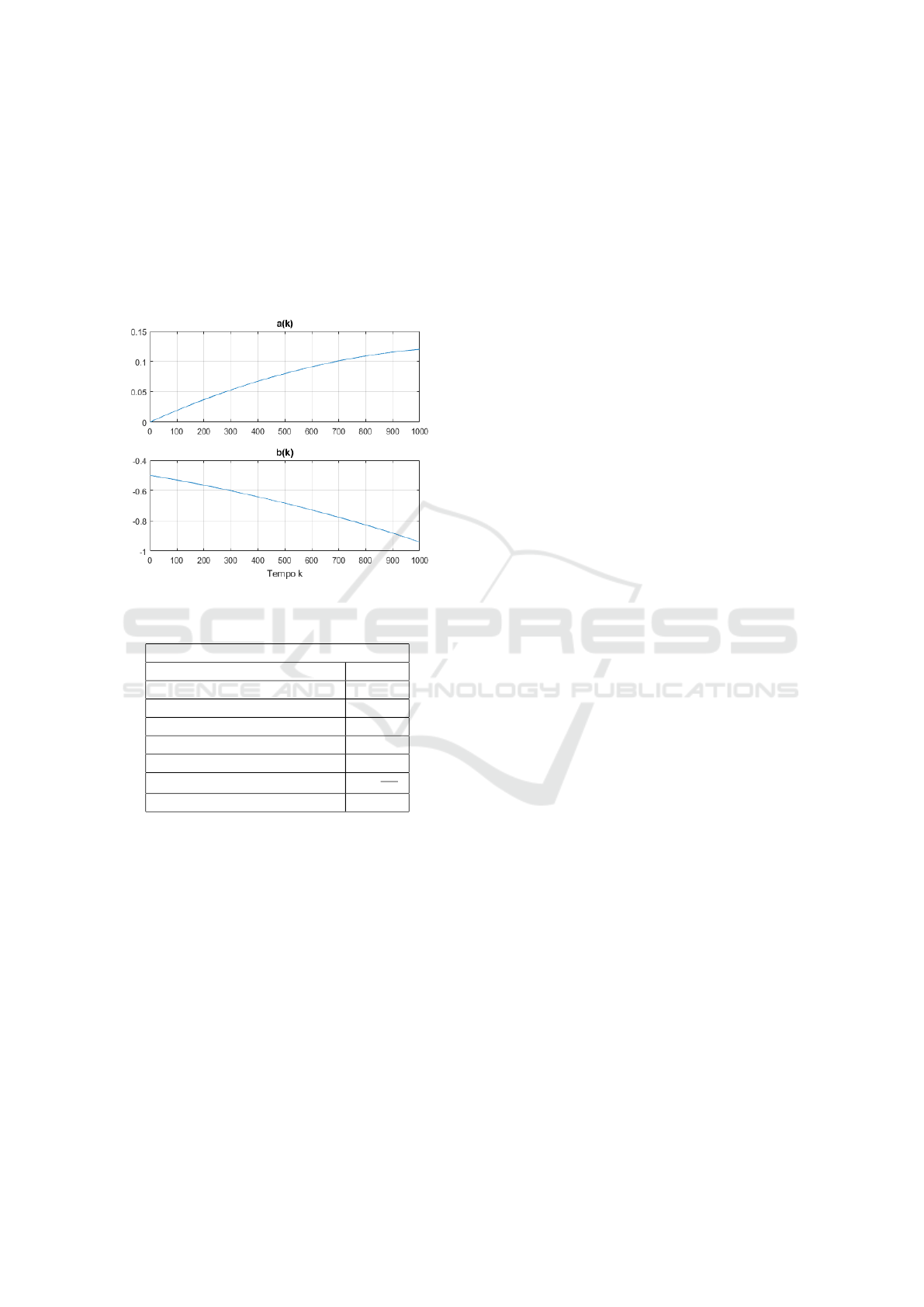
Table 3. The benchmark is modeled by the following
model taken from (Tamariz et al., 2005):
A
k
=
a(k) b(k)
1 −1
(8)
where
a(k) = −
1
2
(k/2500)
2
+
1
2
(k/2500)
b(k) = −
1
16
(k/2500)
4
−
1
8
(k/2500)
3
−
13
16
(k/2500)
2
−
3
4
(k/2500) −
1
2
Coevolutionary Algorithm for Multivariable Discrete Linear Time-variant System Identification
293
The others matrix are invariant
B
k
=
−2 1
1 1
; C
k
=
1 3
1 2
D
k
=
1 3
1 1
(9)
The time variation of the parameters a(k) and b(k)
are shown in Figure 2.
Figure 2: Time variations in the parameters of A
k
.
Table 3: Parameters configuration.
Parameters
Number of populations 4
Generations (g) 4000
Size of population 200
Individuals to crossover 150
Selection probability (α) 0.6
Individuals to mutation 50
Variance (σ) 1 −
g
i
2∗g
Individuals to tournament (q) 2
In the process of identifying systems using coevo-
lution, diversity is a key factor to ensure the evolu-
tion progress. Often the increase in fitness is not as-
sociated to the best fitness individual. For instance,
the chromosome with the highest fitness population
P
A
will not necessarily get better fitness when in-
teracting with the best individual of the population
P
B
. Increased fitness can happen through interactions
between a high fitness individual and another from
below or even between two low fitness individuals.
Thus, ensuring the population diversity through regu-
lar mutations is crucial to its evolution.
Interdependence among populations is a limiting
factor affecting the evolutionary progress of a pop-
ulation. For example, if a population has already
found the optimal solution within their search space,
it will not help if the other populations do not evolve
together. For this reason, the progress of a popula-
tion usually triggers the progress of other populations.
This can be seen in Figure 3, in which the fitness evo-
lution of the four populations along the iterations is
presented. From the figure it is possible to perceive
that the interdependence of the populations occurs
during the generations of 2000 to 3400, where the ad-
vance of a population, that affects the others happens.
The number of generations was determined by empir-
ical analysis. It has been realized that the populations
need at least 4000 generations to obtain relevant fit-
ness values.
To evaluate the proposed method, the data gener-
ated by white noise (N = 1000) was divided into 5
sets: (U
1
,Y
1
),(U
2
,Y
2
),(U
3
,Y
3
),(U
4
,Y
4
) and (U
5
,Y
5
).
In those sets, the system variation is higher for the
higher index data. For instance, the variation for
(U
2
,Y
2
) is greater than those of (U
1
,Y
1
) and less than
(U
3
,Y
3
). In each data set, three additional methods
were applied: MOESP-VAR, GA and RS. To ensure a
fair evaluation, the number of iterations (generations)
made for each method, except for MOESP-VAR, was
the same. In addition, GA uses the same operators
and parameters applied to COEA.
The results are presented in the Table 4. It is possi-
ble to infer that MOESP-VAR and COEA have simi-
lar performance, but in most cases the coevolution has
a slight advantage. This may be a promising result
which indicates that more elaborate refinement may
lead to coevolution to find the solution even better for
time-varying system identification problem.
Both GA and RS have fitness ten times lower than
MOESP-VAR and COEA, this occurs because GA
and RS try to find the best configuration of the sub-
spaces at once, that is, they work with the evolution of
individuals with dimension 16. On the other hand, co-
evolution uses the idea of ”divide for conquer ”, where
different populations try to find the sub-solutions that
interact better with the other individuals of other pop-
ulations.
7 CONCLUSIONS
In this paper the steps to identify time-varying sys-
tems with COEA are defined. The results have
demonstrated that this type of algorithm has bet-
ter performance (fitness) than deterministic method
MOESP-VAR in the majority of the examples stud-
ied. Moreover, this approach estimates models of
time-varying systems, which represent the system in a
window or time interval. In addition, the coevolution
allows to parallelize the evolutionary process, which
can make it competitive in terms of execution time.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
294
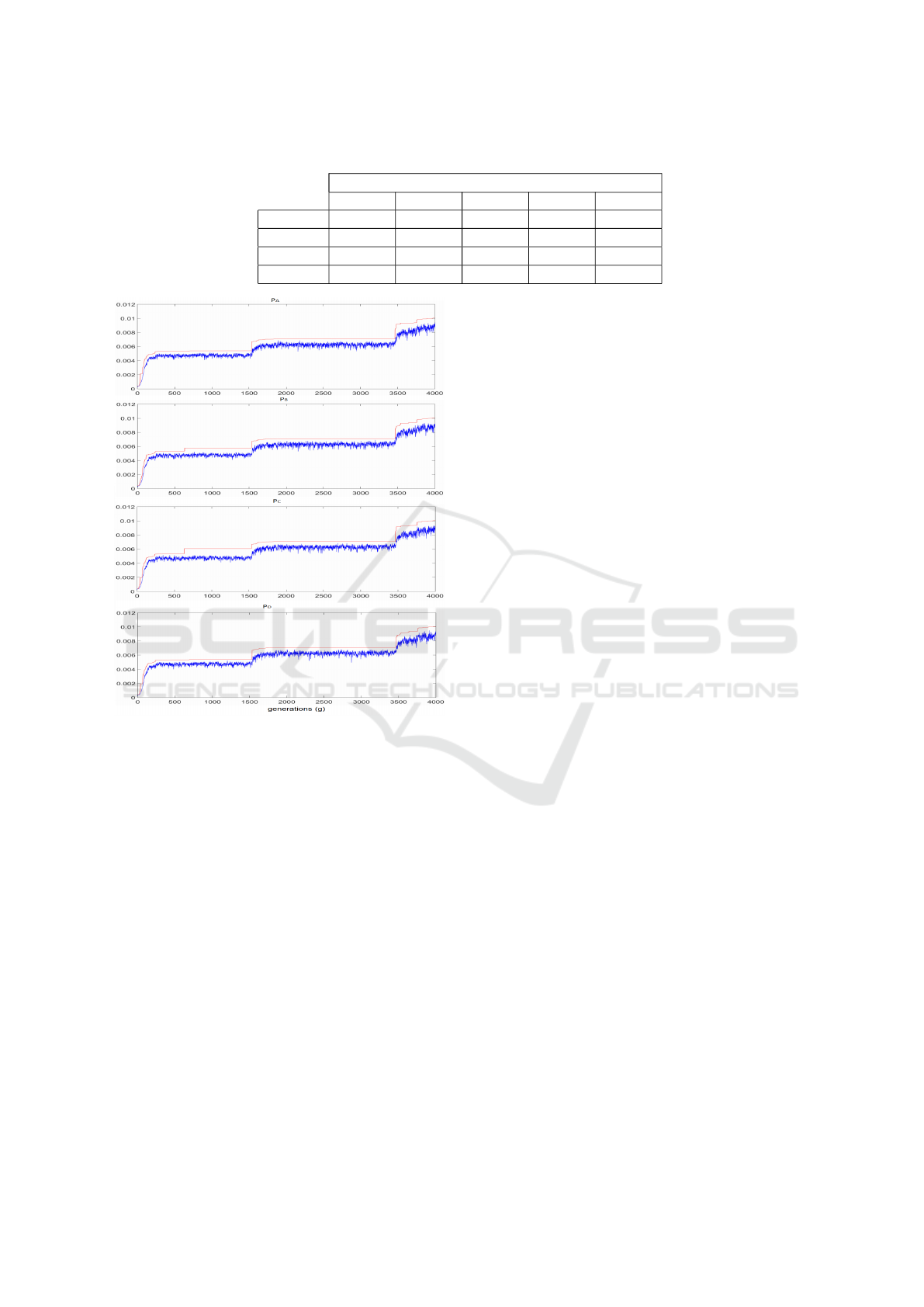
Table 4: Fitness value of the best individual for the data sets used in each method.
Fitness (x10
−3
)
(U
1
,Y
1
) (U
2
,Y
2
) (U
3
,Y
3
) (U
4
,Y
4
) (U
5
,Y
5
)
COEA 10.1 6.2 5.4 5.1 2.2
MOESP-VAR 8.23 6.51 5.33 4.27 2.13
GA 0.97 0.78 0.85 0.83 0.67
RS 0.82 0.65 0.81 0.61 0.52
Figure 3: Fitness of the four populations for (U
1
,Y
1
) set .
The red curve represents the fitness of the best individual
(best fitness) and the blue curve is the mean fitness of the
population.
The main objective was to find the matrices
ˆ
A,
ˆ
B,
ˆ
C,
ˆ
D (state-space model), that minimize the es-
timation error by solving an optimization problem. A
new approach for future work would be to develop a
recursive coevolution method, to estimate the state-
space model at each instant of time. Other evolution-
ary techniques can be implemented to find the best
alternative to solve the defined optimization prob-
lems. Finally, the proposed method can be applied to
model time series and compare results with immuno-
inspired algorithm (Giesbrecht and Bottura, 2015).
REFERENCES
De Castro, L. N. and Von Zuben, F. J. (2002). Learning and
optimization using the clonal selection principle.
Giesbrecht, M. and Bottura, C. P. (2015). Recursive
immuno-inspired algorithm for time variant discrete
multivariable dynamic system state space identifica-
tion. International Journal of Natural Computing Re-
search,5(2), April-June 69-100.
Hillis, D. (1991). Co-evolving parasites improve simu-
lated evolution as an optimization procedure. Artifi-
cial Life II, SFI Studies in the Sciences of Complexity
10, 313324.
Katayama, T. (2005). Subspace Methods for System Identi-
fication. Springer.
Kirkpatrick, S., Gerlatt, C. D. J., and Vecchi, M. P. (1983).
Optimization by Simulated Annealing. Science.
Ljung, L. (1999). System Identification-Theory for the User.
Prentice-Hall, Upper Saddle River, N.J., 2nd edition
edition.
Overschee, P. V. and Moor., B. D. (1994). N4SID:
Supspace Algorithms for the Identification of Com-
bined Deterministic-Stochastic Systems. Automatica,
30(1):75-93.
Potter, M. and Jong, K. D. (1994). A cooperative coevolu-
tionary approach to function optimization. See Davi-
dor and Schwefel, pp. 249257.
Potter, M. and Jong, K. D. (2000). Cooperative coevolu-
tion: an architecture for evolving coadapted subcom-
ponents.
Rodrigues-Vasquez, K., F. C. and Fleming, P. (2004). Iden-
tifying the structure of nonlinear dynamic systems us-
ing multiobjective genetic programming.
Rosin, C. and Belew, R. (1996). New methods for com-
petitive coevolution. Evolutionary Computation 5(1),
129.
Tamariz, A. D. R., Bottura, C. P., and Barreto, G. (2005).
Iterative MOESP Type Algorithm for Discrete Time
Variant System Identification. Proceedings of the 13th
Mediterranean Conference on Control and Automa-
tion.
Verhaegen, M. and Dewilde, P. (1992). Subspace model
identification - part 1 : The output-error state-space
model identification class of algorithms. International
Journal of Control 56, 5, 11871210.
Wakizono, M., H. T. and Uosaki, K. (2006). Time vary-
ing system identification immune based evolutionary
computation.
Wiegand, R. P. (2003). An analysis of cooperative coevolu-
tionary algorithms. Ph.D. Dissertation Department of
Computer Science, George Mason University, Fairfax,
VA, USA.
Coevolutionary Algorithm for Multivariable Discrete Linear Time-variant System Identification
295
