
Mixed Energy Model for a Differential Guide Mobile Robot Evaluated
with Straight and Curvature Paths
Mauricio F. Jaramillo Morales an d Juan B. G´omez Mendoza
Department of Electrical, Electronic and Computer Engineering, National University, Manizales, Colombia
Keywords:
Energy Model, Dynamic Model, Gaussian Path Planning, Mobile Robot.
Abstract:
Energy consumption is an important issue for mobile robots that carry a limited energy sources, like batteries,
for a long period of time. An energy model can relate t he kinematic movements of the robot with energy
values, giving an estimation of the energy needed for the robot to fulfill a specific task. In this study an energy
model is proposed, based on the dynamic parameters of the mobile robot, as well as the motors, given an
energy value close to real energy consumption. Mixed energy model is tested with a well-known motor energy
model, using the velocities related to straight and curvature paths as i nput. In the r esults, a higher energy
consumption value is identified by the mi xed energy model, especially when the acceleration of the mobile
robot increases. Energy models are configured with P3-DX robot mobile parameters.
1 INTRODUCTION
For mobile robots, it is critical to know th e amount
of energy that it mu st carry in order to accomplish a
long-ter m task. Many researches in the literature un-
derline that major ene rgy consumption is generated
for the DC moto r, which governs wheel movements.
However, the influence that the d ynamic p a rameters
of the mobile robot can exert in total energy con-
sumption, has been ignored (P. Tokekar and Isler,
2014), especially for the differential guide mobile ro -
bot configur ation (Kim and Kim, 2008). In this paper,
a goo estimation of power and energy consumptio n,
using a mixed energy model that takes into ac c ount
the DC moto r and the mobile robot dynamic para-
meters, incorporating in a path planning, is presen-
ted. An energy model can be calculated using the me-
chanical and kinetic energy f ormulation, based on the
mass and velocity of the mobile robot (Liu and Sun,
2014; G. Kladis and Guerra, 2011), or friction esti-
mation (Dogru and Marques, 2016; Dogru and Mar-
ques, 2018). H owever, th e energy con sumption is not
related to the dynamic parameters of the robot as mo-
ments of inertia. Instead, Chuy and Bensekane’s in-
vestigation presents a power consumption modeling,
using a 2- dimensional, second order differential equa-
tion, that describes a four wheel steering robot for-
ces (O. Chuy Jr. and Ord onez, 2009; I. Bensekrane
and Merzouk, 2017). But, the dynamic p arameters of
the DC motor model are no taken into account in the
energy values, related for example, with motor ch a-
racteristics such as voltage and torque constants.
In Kim and Tokekar’s work, velocity profiles that
minimize mobile robot energy consumption for a gi-
ven p ath, is calculate d (Kim and Kim, 2008; P. Toke-
kar and Isler, 2014). The researchers use the energy
motor model as a cost function to op timize, but in the
energy saving values presented, the contribution of
mobile ro bot dynamic param eters, such as the weight
of the mobile robo t or load weight, is not reflected.
In this paper, the d ynamic mobile robot model b a-
sed on the Lagrange formalism, and the dynamic mo-
tor model based on electrica l and torque characteris-
tics, are calculated. Th e n, the models torque variables
are mixed. Finally a space state realization (Yun and
Yama moto, 1993) is proposed, in ord er to expand the
state variables and simplify the Lagrange multipliers.
This tran sformation permits d escription of the mixed
energy model with ordinary differential equations, so
that energy consumption values can be calculated. In
the re sults sectio n, the mixed energy model is com-
pared to the well-known ene rgy motor model. Both
models a re tested, using the typical trapezoidal velo-
city profile for the straight path, an adap te d Gaussian
function for the curvature path, and a different load
weights.
The rest of this paper is organiz ed as follows: in
Section 2 the mobile robot dynamic mo del, motor dy-
namic model, and mixed energy model formulation
is pre sented. Section III presents the calculation of
Morales, M. and Mendoza, J.
Mixed Energy Model for a Differential Guide Mobile Robot Evaluated with Straight and Cur vature Paths.
DOI: 10.5220/0006912004730479
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 473-479
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
473

1
2
r
X
Y
y
x
Po
Figure 1: Schematic of the differential guide mobile robot.
the velocities, b a sed on the desired straight a nd curva-
ture paths. In Section IV, the simulations o f the motor
energy model and the mixed energy model are pre-
sented. Finally, conclusions are presented in Section
V.
2 MIXED DYNAMIC AND
ENERGY MODELS
In this section , the mixed dynamic and energy models
are presented. The dynamic mobile robot mo del and
the dy namic DC motor model are calculated . Then,
both dynamic mo dels are mixed, matching the torque
values. Finally a space state realization (Yun and Ya -
mamoto, 1993) is applied to obtain the ene rgy model
formu lation.
2.1 Dynamic Mobile Robot Model
based on the Lagrange Formulation
The system of nonlinear differential equations that re-
presents the dynamic mobile robot model ( Yun and
Yama moto, 1993; Yamamoto and Yun, 1994), can be
determined by the Lagrange formulation to establish
equations of motion for the mobile robot:
d
dt
∂T
∂ ˙q
i
−
∂T
∂q
i
= τ
i
− a
1i
λ
1
− a
2i
λ
2
(1)
with i= 1, ...4
Where:
T is the equa tion for mobile kinematic ene rgy.
q is the vector of the state variables.
λ is the vector of the Lagrange’s multip liers.
τ is the vector of the torques ap plied to the wheels.
a
i j
are the matrix movement restriction com ponents.
In Figure 1, the differential wheeled mob ile robot
is shown. The mobile robot configuration has two
movement restrictions:
• The mobile robot can not move in lateral di-
rection.
˙xsin φ− ˙ycosφ = 0 (2)
• The two d riving wheels of the mobile robot, roll
and do not slip.
˙xcosφ+ ˙ysinφ+ l
˙
φ = r
˙
θ
1
(3)
˙xcosφ+ ˙ysinφ− l
˙
φ = r
˙
θ
2
(4)
Where (x, y) are the coordin a te s of point Po in the
fixed reference coordinated frame X −Y , φ is the he-
ading angle o f the mobile robot measured from the
X-axis, and θ
1
,θ
2
are the angular position s of the left
and right driving wheels.
The equa tions 3 and 4 are added and the equation 5 is
obtained.
˙xcosφ+ ˙ysinφ =
r
2
(
˙
θ
1
+
˙
θ
2
) (5)
The equations 2 and 5 can be written in the matr ix
form:
a
11
a
12
a
13
a
14
a
21
a
22
a
23
a
24
˙x
˙y
˙
θ
1
˙
θ
2
= 0 (6)
Where the components of the restriction mo-
vement matrix are:
a
11
a
12
a
13
a
14
a
21
a
22
a
23
a
24
=
"
−sinφ cosφ 0 0
−cos φ −sin φ
r
2
r
2
#
(7)
Matrix e quation 6, can be expressed as:
A(q) ˙q = 0 (8)
Where
q =
q
1
q
2
q
3
q
4
=
x
y
θ
1
θ
2
(9)
Now, the total kinetic energy equation may be calcu -
lated with the equation:
T =
1
2
m( ˙x
2
+ ˙y
2
) + m
c
cd(
˙
θ
1
−
˙
θ
2
)( ˙y cosφ− ˙x sin φ)
+
1
2
I
w
(
˙
θ
1
2
+
˙
θ
2
2
) +
1
2
I
2
c
(
˙
θ
1
−
˙
θ
2
)
2
(10)
Equation 10 can b e rewritten as:
T = T
t
+ T
r
+ T
m
+ T
w
(11)
Where:
T
t
= is the kinetic energy of translation.
T
r
= is the kinetic energy of rotation.
T
m
= is the mobile inertia moment without wheels.
T
w
= is the Wh eel inertia moment.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
474

The notation of the equation is:
b = is the displacement f rom each of the dri-
ving wheels to the axis of symmetry.
d = is the displacement from po int P
o
to the ma ss
center of the mo bile robo t, which is assumed to be on
the ax is of symmetry.
r = is the radius of the driving wheels.
c = is a constant equal to
r
2b
.
m
c
= is the mass of the mobile robot witho ut the
driving wheels an d the r otors of the motors.
m
w
= is the mass o f each driving wheel plus the rotor
of its motor.
I
c
= is the moment of inertia of the mobile robot
without the driving wheels and the rotors of the
motors abou t a vertical axis thro ugh the intersection
of the axis of sy mmetry with the dr iving wheel axis.
I
w
= is the moment of inertia of each driving wheel
and the motor roto r about the wheel axis.
I
m
= is the moment of inertia of each driving wheel
and the motor roto r about a wheel diameter.
Then, the derivatives of th e Lagra nge movement
equation a re made for i, from one to four. Finally, the
nonlinear differential system equatio n, which r epre-
sents the dynamic mobile robo t model is:
λ
1
sinφ+ λ
2
cosφ = m ¨x − m
c
d(
¨
φsin φ+
˙
φ
2
cosφ)
−λ
1
cosφ+ λ
2
sin φ = m ¨y + m
c
d(
¨
φcos φ −
˙
φ
2
sin φ)
τ
1
− cbλ
2
= m
c
cd( ¨y cos φ − ¨x sin φ)
+ (I
2
c
+ I
w
)
¨
θ
1
− I
2
c
¨
θ
2
τ
2
− cbλ
2
= − m
c
cd( ¨y cos φ− ¨x sin φ)
− I
2
c
¨
θ
1
+ (I
2
c
+ I
w
)
¨
θ
2
(12)
2.2 The Dynamic Motor Model and
Dynamic Model Mixture
The dynamic model o f a DC motor can be expressed
by the differential equations (Electro-Craft, 1977)
L
d
i
d
t
+ Ri + K
w
˙
θ = V
K
t
i − I
s
¨
θ− ν
˙
θ = τ
(13)
where:
V and i = armature voltage and current.
R and L = armature resistance and inductance.
ν = is the viscous f riction coefficient.
τ = is the dynamic lo a d applied to the motor.
K
t
= is the motor torque constant.
K
w
= is the motor voltage c onstant.
I
s
= is the motor shaf t inertia.
θ = [θ
1
θ
2
] = are the angular positions of the wheels.
The first expression in 13 is voltage equation for a
DC mo tor, and the second expression reflects torque
forces a pplied to the DC motor. In several studies as
in kim’s r esearch (K im and Kim, 2008), the to rque va-
riable is neglected, which seem s to be problematic for
a real objec t. In the proposed model, the torque va-
lue of a DC dynamic m otor model is ca lc ulated using
mobile ro bot dynamic mode l.
A reduced order model ca n b e achieved for dyn-
amic behavior, as the electric time constant L/R may
be neglected, if compared to the me chanical time con-
stant i/ν. He nce, one may consider L = 0, and the first
equation yields.
i =
V − K
w
˙
θ
R
(14)
The e quation (14) can be replaced in the second
DC motor model equation, and by isolating τ
τ =
K
t
R
V − I
s
¨
θ−
K
t
K
w
R
+ ν
˙
θ (15)
In order to achieve the mixtur e of dynamic mo-
dels, the equation for the DC m otor torque τ (15), may
be rep la ced in the dynamic robot mobile model sy-
stem equation (12). Also the equation
˙
φ = c(
˙
θ
1
−
˙
θ
2
),
calculated from the subtraction of the equations 3 and
4, may be used for ordering and writing the r esulting
mixed dynamic model in the following matrix equa-
tion:
M(q) ¨q + F ˙q + C(q, ˙q) = TV − A(q)λ (16)
Where:
M(q) =
m 0 −α
1
α
1
o m α
2
−α
2
−α
1
α
2
I
2
c
+ I
w
+ I
s
−I
2
c
α
1
−α
2
−I
2
c
I
2
c
+ I
w
+ I
s
α
1
= m
c
cd sinφ
α
2
= m
c
cd cosφ
F =
0 0 0 0
0 0 0 0
0 0
K
t
K
w
R
+ ν
0 0 0
K
t
K
w
R
+ ν
C(q, ˙q) =
−m
c
d
˙
φ
2
cosφ
−m
c
d
˙
φ
2
sinφ
0
0
T =
0 0
0 0
K
t
R
0
0
K
t
R
A(q) =
−sinφ −cosφ
cosφ −sinφ
0 cb
0 cb
(17)
Mixed Energy Model for a Differential Guide Mobile Robot Evaluated with Straight and Curvature Paths
475

2.3 The Mixed Energy Model
In this section, a space state realization is proposed
(Yun and Yamamoto, 1993), in order to transform the
nonlinear differential equation system that represents
the mixed dynamic model, into an ordinary differen-
tial equation system, and can be tested numerically.
In the process, the state space variable is increased,
and the Lagrange multipliers are simplified, using the
null space S(q) of the restric tion matrix A(q). If η
is the vector of the new variables, it can be said th a t
A(q)S(q )η = 0, and using the e quation A(q) ˙q = 0 (8),
it may also be said that ˙q = S(q)η.
The vector η was chosen as:
η =
˙
θ where,
˙
θ = [
˙
θ
1
˙
θ
2
]. (18)
Being S(q)
S(q)
=
s
1
(q) s
2
(q)
=
cb cos(φ) cb cos(φ)
cb sin(φ) cb sin(φ)
1 0
0 1
Now, multiplyin g b oth sides of equation (16) by
S
T
(q) and using the result S
T
(q)A(q) = 0, it can be
said that:
S
T
(q)M(q) ¨q + S
T
(q)F ˙q + S
T
(q)C(q, ˙q) = S
T
(q)TV
− S
T
(q)A(q)λ
(19)
Derived from equation ˙q = S(q)η again, te rm ¨q is
obtained.
¨q = S(q)
˙
η+
˙
S(q)η (20)
Replacing ˙q and ¨q.
S
T
M(S
˙
η+
˙
Sη) + S
T
F(Sη) + S
T
C = S
T
TV (21)
Isolating
˙
η from (21), the following is obtained.
S
T
MS
˙
η = S
T
TV − S
T
C − S
T
FSη − S
T
M
˙
Sη
˙
η = (S
T
MS)
−1
(S
T
TV − S
T
C − S
T
FSη− S
T
M
˙
Sη)
(22)
Therefore the dynamic mode l can be re presented
with these new states variables.
x =
x
y
θ
1
θ
2
˙
θ
1
˙
θ
2
=
q
η
=
x
1
x
2
x
3
x
4
x
5
x
6
(23)
The mo tion equation (22) and the equa tion ˙q =
S(q)η may be rep resented in the state space form
˙x = f (x) + g(x)V (24)
Where:
f (x) =
S(q)η
−(S
T
MS)
−1
(S
T
C + S
T
FSη+ S
T
M
˙
Sη)
g(x) =
0
(S
T
MS)
−1
S
T
T
(25)
The voltage variable can b e obtained, isolating V
from equation (21).
V = (S
T
T )
−1
(S
T
MS
˙
η+ S
T
M
˙
Sη+ S
T
FSη + S
T
C)
(26)
Finally, the mixed ene rgy model can be calcula-
ted with the power integral, using the current equ ation
(14) and the voltage e quation ( 26).
E(t) =
Z
V (t) i(t) dt (27)
3 VELOCITY INPUTS FOR THE
ENERGY MODELS
In this section, the calculation of the angular veloci-
ties of the mobile robot wheels, re la ted with straight
and curvature paths, are shown. For the straig ht path,
a typical trap e zoidal velocity profile is used, so the ro-
bot m obile moves a specific linear distance, taking it
into account that the maximum linear velocity of the
robot P3- D X is 1.21 m/s, and th e m aximum velocities
of the wheels (figure 3 (a)).
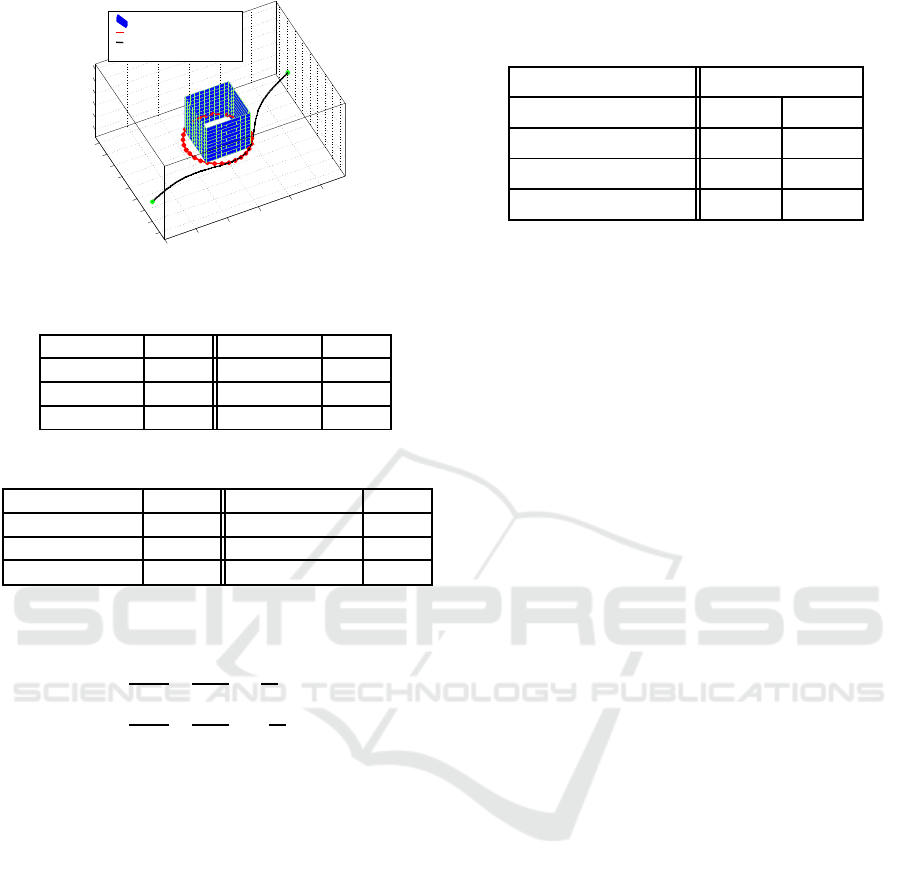
For the curvature path, a path planning from pre-
vious work, based on the G aussian function , is propo-
sed. In this case a cube is selected as an obstacle in
the environment where the mobile robot has to travel.
The base of the cube can be easily delimited by a ci-
rcumference. When the mobile robo t m oves from an
initial point to a goal point an d ha s to avoid the obsta-
cle, a Gaussian func tion is adapted to pass through the
circumference, as shown in the Fig ure 2. The equa-
tion th at represents the Gaussian function is:
y
d
= a exp
−(x
d
− f )
2
2h
2
(28)
Where x
d
and y
d
represents the desired pa th, f is the
position of the center of the peak, and a is the h eight
of the curve’s peak. In order to accomplish the adapta-
tion o f the Gaussian functio n with the circumference
that delimited the obstacle, f is the same center of the
circumference, and a is the same r adius of the circum-
ference. The variable h is the standard deviation that
controls the wid th of the bell. The correct estimation
of this variable prevent the desired path from passing
through the circumference’s area.
Once the curvature path is obtained, the angula r
velocities of the wheels can be calculated using the
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
476
0
1
2
3
4
5
0.5
0
0.5
1
1.5
2
2.5
3
3.5
0.5
0
0.5
1
1.5
2
Obstacle
o
Circumference
Adapted Gaussian path
o
Initial and final position
Figure 2: Adapted Gaussian path.
Table 1: Mobile parameters of the WMR, P3-DX.
Parameter Value Parameter Value
r [m] 0.095 m
c
[kg] 6.04
b [m] 0.165 m
w
[kg] 1.48
d [m] 0
Table 2: Motor parameters of the WMR, P3-DX.
Parameter Value Parameter Value
R [ω] 0.7 K
w
[(rad/s)/V] 0.88
ν [Nm/(rad/s)] 0. 035 K
t
[Nm/A] 0.88
I
s
[kgm
2
] 0.0713
kinematic inverse of the mobile robot, which is repre-
sented by the following matrix:
˙
θ
1
˙
θ
2
=
cosφ
r
sinφ
r
2l
r
cosφ
r
sinφ
r
−
2l
r
˙x
d
˙y
d
˙
φ
(29)
4 SIMULATION AND FINAL
RESULTS
The en ergy consumption of the mixed energy mod el
represented by Equation (27) and the motor energy
model (Kim and Kim, 2008; P. Tokekar and Isler,
2014) is compared, when the mobile robot travels on
straight an d curvature paths, a path planning usually
has these two kinds of paths. In order to set up both
energy models, the mob ile robot and motor parame-
ters of the P3-DX mo bile platform present in Kim’s
work, were used. These par a meters are shown in ta-
bles 1, 2.
In the mixed energy model, when traveling a
straight path, the angular velocity in both wheels has
to be the same, in this case
˙
θ
1
=
˙
θ
2
= v/r, with v as the
linear velocity of the mobile robot.
Figure 3 shows the energy consumption of both
energy models , in the critical case when the mo-
Table 3: Simulation results of the energy models with a dif-
ferent kind of maximum linear velocities of the mobile ro-
bot.
Trapezoidal velocity Energy value
Maximum velocity Motor Mixe d
0.66 m/s 53.65 J 54.51 J
0.88 m/s 71.89 J 73.68 J
1.21 m/s 98.85 J 102.9 J
bile robot travels on a straight path of 10 meters, at
the maximum trapezoidal velocity profile (1.21 m/s),
with the ma ximum load weight (7.6 kg) allowed by
the P3-DX mobile rob ot, and a fixed mobile weight
of 6.04 kg.
Figure 3 also shows that the energy consump tion
values given by the mixed energy model increase fas-
ter during the acceleration of the mobile robot linear
velocity, but are the same when the velocity remains
at the maximum value. During deceleration, during
the time c orresponding to the negative phase of power
consumption, a certain amount of energy is regenera-
ted and stored in the batteries. The energy regenera-
ted is equal to 1.05 joules for the motor ene rgy model,
and 9.07 joules for the mixed energy model.
The rec overed energy allows for reduction of the
total energy consumption d ifference between energy
models. Total energy consumption in the motor
energy model is 98.84 joules, and in the mixed energy
model 104.3 jo ules. It is important to un derline that
the highest difference of energy consumption ha ppens
during acceleration. In this phase, e nergy consump-
tion in the motor energy model is equal to 22.03 jou-
les, a nd in the mixed energy model, 36.74 joules.
Table 3 shows the energy consumption values gi-
ven by the energy models when the mo bile robot tra-
vels on a straight path of 10 meters, with a mobile
robot weight of 6.04 kg, with a fixed load weight of
3.76 kg and with different maximum set of velocities
of the trapezoidal veloc ity profile of th e mobile robot.
As the energy models dep ends of the kinematic
mobile robot model, energy consumption raises in
both models, when the maximum veloc ity profile in-
creases as well. However, the ene rgy values are hig-
her in the mixed energy m odel because only this mo-
del depends on the dynamic parameters of the robot
as moments of inertia and weight.
It is for this reason that in Table 4, only the mixed
energy model is considerably affected in its energy
consumption value, when the trapezoidal velocity is
fixed at a velocity of 0.88 m/s, and th e lo ad weight
increases.
For the study of energy consumption when a m o-
bile robot travels on a curvature path, a n initial and
Mixed Energy Model for a Differential Guide Mobile Robot Evaluated with Straight and Curvature Paths
477

−2 0 2 4 6 8 10 12 14
0
5
10
15
Time in secs
Velocity in rad/s
Trapezoidal velocity of the wheels
0 2 4 6 8 10 12
−10
−5
0
5
10
15
20
25
30
35
Power consumption
Time in secs
Power in watts
Mixed model
Motor model
0 2 4 6 8 10 12
0
20
40
60
80
100
120
Energy consumption
Energy in joules
Time in secs
Mixed energy model
Motor energy model
Figure 3: Simulation with a maximum trapezoidal angular velocity of the wheels (12.73 rad/s), maximum load weight carried
by the mobile robot (7.6 kg), and a mobile weight of 6,04 kg, for a linear distance of 10 meters. (a) Trapezoidal angular
velocity of the wheels (b) Power consumption given by the energy models. (c) Energy consumption given by the energy
models.
0 2 4 6 8 10 12
5
4
3
2
1
0
1
2
3
4
5
acceler
Time in secs
ation in m
0 2 4 6 8 10 12
2
4
6
8
10
12
14
16
18
Power consumption
Time in secs
Power in watts
Mixed model
Motor model
0 2 4 6 8 10 12
0
10
20
30
40
50
60
Energy consumption
Time in secs
Energy in joules
Mixed energy model
Motor energy model
Figure 4: Simulation wi th a G aussian f unction adapted to a circumference that delimited the obstacle, maximum load weight
carried by the mobile robot (7.6 kg), and a mobile wei ght of 6,04 kg. (a) Linear acceleration of the wheels for the circumfe-
rence radius of 0.5 m, 0.75 m, and 1 m. (b) Power consumption given by the energy models, for a radius circumference of 0.5
m. (c) Energy consumption given by the energy models, for a radius circumference of 0.5 m.
Table 4: Simulation results of the energy models with a dif-
ferent load weights.
Total weight energy consumption
Load and robot Motor Mixed
6.04 k g 71.9 J 73.15 J
9.8 kg 71.89 J 73.68 J
13.64 kg 71.88 J 74.25 J
Table 5: Energy consumption of the models when the radius
circumference of t he adapted Gaussian function changing.
Parameters Energy consumption
Radius Distance Motor Mixed
0.5 m 7.06 m 51.26 J 56.96 J
0.75 m 7,17 m 50.13 J 52.04 J
1 m 7.28 m 50.74 J 51.66 J
goal position for the desired path is (x
d
= 6, y
d
= 4),
the position of the circ umference center is (x
c
= 3, y
c
= 2), the edge length of the o bstacle cube is 0.7 me-
ters. The only variable that changes for this study’s
proposes is the circumference radius tha t delimited
the obstacle. In the Figure 4(a) is shows that the li-
near acc eleration of the mobile robot is inversely re-
lated to the circumference radius, because a smaller
radius represents a narrow bell of the adapted Gaus-
sian function, forcing the mobile robot to accelerate
to reach the pe ak. Is for that reason that in th e ta-
ble 5 with a sma ller circumference radius, power and
energy consu mption is h igher, despite the facts that, in
the other cases, the travel distance is greater. Finally,
in the Figure 4 the behavior of the energy models
when travels on a curva ture path re mains the same
as on the straight path, the mixed energy mo del incre-
ases its energy values compared to the mo tor energy
model, when th e mobile robo t accelerate, because the
dynamic parameters of the robot, are taken into con-
sideration in the energy model proposed.
5 CONCLUSIONS
In this paper, an energy model that takes robot and
motor dynamic parameters into account, is proposed.
The en ergy consumption of the mixed energy mod el
was compared to a typical motor energy model, using
the angular velocities of the wheels as they relate re-
lated to the travel on straight and curvature paths. The
simulation results show that the highest p e rcentage of
energy consumption came from the motors. However,
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
478

during mobile robot acce le ration, the dyn a mic para -
meters of the robot, such as inertia moments, r obot
weight, or load weight, also influenced total energy
consumption. It is f or that r eason th a t the energy va-
lues in figure 3 (b), (c), 4 ( b), (c), and in tables 3 ,
4, 5 are higher in the mixed energy model than those
of the DC motor energy model, because the proposed
model con sid er the DC motor and the mobile robot
dynamic models. However, in the de c eleration phase,
it was proven that a certain a mount of energy was re-
generated and stored in the batteries, allowing for the
reduction of the total difference in ene rgy consump-
tion betwe e n energy models. A good estimation of
power and ene rgy c onsumption as pre sented, can be
more easily related to the real-time a utonomy of dif-
ferential guide mobile r obots, which c arry their own
energy source.
For the fu rther study, the problem of testing the
mixed energy model, on straight and curvature paths
that minimize the energy consumption, and a experi-
ment validation using the Nomad Super Scout mobile
robot, remains.
REFERENCES
Dogru, S. and Marques, L. (2016). Power characterization
of a skid-steered mobile field robot. In International
Conference on Autonomous Robot Systems and Com-
petitions (ICARSC),4-6 May, pages 15–20, Braganca,
Portugal.
Dogru, S. and Marques, L. (2018). A physics-based po-
wer model for skid-steered wheeled mobile robots. In
IEEE Transactions on Robotics, volume 34, pages 421
– 433.
Electro-Craft, C. ( 1977). DC Motors, Speed Controls, Servo
Systems: An Engineering Handbook. Pergamon Press,
USA, 3th edition.
G. Kladis, J. Economou, K. K. J. L. and G uerra, T. (2011).
Energy conservation based fuzzy tracking for unman-
ned aerial vehicle missions under a priori known wind
information. In Engineering A pplications of Artificial
Intelligence, volume 4, pages 278–294.
I. Bensekrane, P. Kumar, Y. A. and Merzouk, R. (2017).
Towards adaptive power consumption estimation for
over-actuated unmanned vehicles. In IEE E Internati-
onal Conference on Robotics and Biomimetics, pages
92–97, Macau S A R, China.
Kim, H. and Kim, B.-K. (2008). Minimum-Energy motion
planning for differential-driven wheeled Mobile Ro-
bots, Motion Planning. Xing-Jian Jing (Ed.), ISBN:
978-953-7619-01-5, InTech, Croatia.
Liu, S. and Sun, D. (2014). Minimizing energy consump-
tion of wheeled mobile robots via optimal motion
planning, april. In IEEE/ASME Transaction on Me-
chatronics, volume 19, pages 401–411.
O. Chuy Jr., E.G Collins Jr., W. Y. and Ordonez, C. (2009).
Power modeling of a skid steered wheeled robotic
ground vehicle, 12-17 may. In IEE E International
Conference on Robotics and Automation, pages 4118–
4123, Kobe, Japan.
P. Tokekar, N. K. and Isler, V. (2014). Energy-optimal tra-
jectory planning for car-like robots. In Autonomus Ro-
bots Journal, volume 37, pages 279–300.
Yamamoto, Y. and Yun, X. (1994). Coordinating locomo-
tion and manipulation of a mobile manipulator. In
IEEE Transactions on Automatic Control, volume 39,
pages 1326–1332.
Yun, X. and Yamamoto, Y. (1993). Internal dynamic of
a whelled mobile robot. In IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
1288–1294, Yokohama, Japan.
Mixed Energy Model for a Differential Guide Mobile Robot Evaluated with Straight and Curvature Paths
479
