
Progression of Electronic and Communication System for Motion
Control of Modular Snake-like-Robot
Daniel Armando Gómez, Javier Camilo Torres Vera and Hernando León-Rodríguez
Electronic Department, Faculty of Engineering, El Bosque University, Bogota, Colombia
Keywords: Active Joint Mechanism, Snake-like Robot, Modular Master-slave Controller, Continuous Redundant
Robot, Robotic Operating System.
Abstract: This Project consists of a development of an electronics system to manipulate a snake like robot in a
modular way. The structure of this project is based on three topics; The Hardware and its Firmware, The
Mathematical Analysis of the Serpenoid Curves and The Robotic Simulation. In regards to the first topic
electronic cards were implemented in a master-slave relationship for joint control of each mechanical
module, these cards are composed of a DSPIC30F4011, microchip 16-bit microcontroller that incorporates
the CAN module, essential protocol for communication between cards, PWM outputs for motor control,
analogue and digital ports; as well as a socket to connect to an external device through the UART. The
firmware has been written in MikroC Pro. The mathematical analysis is based on the Hirose-Serpenoid
curves, hence every microcontroller implements a characteristic equation from the Hirose curves to generate
a serpentine movement and last but not least the snake like robot is simulated using ROS (Robotic
Operating System) in Rviz.
1 INTRODUCTION
Nature is the best way to analys and development
bioinpired devices with different types of behaviors
and locomotions for modeling. The anatomy of the
snake is composed by the same type of union and
structure where each vertebra allows a rotation in the
horizontal plane of 10-20 degrees and a rotation
between 2-3 degrees in the vertical plane. (Hopkins,
2009) The locomotion system of the snake is very
stable and the body is in constant contact with the
ground at different points, allowing a low centre of
mass and great traction on several surfaces where it
is easy to perceive its great ability to catch a prey or
climb a tree with low energy consumption. The
structural design of a snake is based on the repetition
of its spine along its entire body, where only 3 types
of bones make it up: the skull, the vertebrae and the
ribs. The vertebral column is composed of between
100 and 400 vertebrae and each vertebra allows
small movements in vertical and lateral direction,
but the composition of so many vertebrae allows the
snake a great flexibility and curvature with
dramatically large forces.
Shigeo Hirose introduced Snake-inspired robots
in the 1970s. (Hirose, 2009) Since then, several
numbers of bio-inspired designs about snake like
robots have been conceived and constructed.
Although, the numerous designs of robots follow the
kinematics and locomotion imitating the snake, they
can change enormously in their physical
configuration and purpose. For example, some
robots are redundant; others are hyper-redundant
while others may not have redundancy at all.
(Dowling, 1997) The first designs of snake-robots
used traction wheels or tracks, while at present they
can use passive wheels or without wheels at all.
(Sugita, 2008) Some designs are amphibious and can
move effortlessly between terrestrial environments
and water. (Hopkins, 2009) (Yu, 2009) (Yamada,
2009) However, the demand for new types of robots
is still present for rescue and inspection applications,
where they do not require a robot capable of
negotiating such conditions and difficulties in sewer
lines, water networks and swamps. Robots based on
thin and flexible snakes meet some of these needs.
(Wright, 2012; Aksel, 2008; Ijspeert, 2007;
Biorobotics, 2016).
Commercially, robots for exploration of pipes
are of many kinds, where each one of them fulfils
different functions, mainly that of visual revisions of
the pipelines of drinking water and hydro-sanitary
lines through video capture. However, the
496
Gómez, D., Vera, J. and León-Rodríguez, H.
Progression of Electronic and Communication System for Motion Control of Modular Snake-like-Robot.
DOI: 10.5220/0006913404960502
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 496-502
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

technologies used by these robots are in many cases
obsolete, because their use is purely industrial and
the development and updating cycle is very slow.
Some of the most important of them are reviewing in
the manufacturer's bibliography. (Rausch
Electronics, 2018) (Aries Industries, 2018) (Ibak,
2018) Those robots have a very large disadvantage
in that most of them require a very expensive and
heavy transport logistics and for inspection services
where the cost of using this equipment makes its
frequent application difficult.
According to the electronics and hardware
features of Hibot company created at the Tokyo
Institute of Technology in 2004 by Professor Shigeo
Hirose (HiBot Company, 2018), has developed some
robot controller such as: TITech M4 Controller and
the TITech M4 Controller. The last one is designed
based on the STM controller 32-bit ARM Cortex M4
at 168 MHz, it has LAN Ethernet, Can, SPI, I2C and
UART interfaces, also its features include Digital
I/O, A/D at 12 bits, D/A and 9axis motions sensor.
Even USB and micro SD memory reader are
available. On the other hand, this project developed
an electronic system and control to manipulate a
snake like robot with continues redundant active
modules. The electronic cards implemented are pre-
set as a master-slave controller that executes the
joints control of each mechanical module. The figure
1 showing the main cards composed by one
DSPic30F4011 microchip with 16-bit
microcontroller that incorporates the essential
communication protocol of CAN, PWM outputs for
motor control, analogue and digital ports; as well as
a socket to connect to an external device through the
UART.
Figure 1: Photorealistic picture of the control card.
The aim of this project is to propose the basics
with a low cost with different approaches for design
of a snake like robot bio mimetically inspired with
passive wheel and similar hardware developed by
HiBot. This paper intended to presents the design
criteria for electronic system to control and
manipulate the robots, in addition presents
mathematical model analysis and simulation.
Figure 2: Conceptual design of modular snake like robot.
2 SERPENTINE LOCOMOTION
There are different types of locomotion in snakes
based on the condition of the terrain and the type of
environment. In the development of the project the
cards and control can reproduce any of the 4 forms
types of snake´s locomotion presented in figure 3,
however, the applications of the control system and
the communications of the cards focused the
serpentine locomotion, as verification of control
system. (Rollinson, 2014).
Figure 3: Kinds of snake locomotion. (Micu, 2018).
Progression of Electronic and Communication System for Motion Control of Modular Snake-like-Robot
497

3 ELECTRONIC SYSTEM
PARAMETERS
The conditions of the electronic design are based on
the components necessary to generate the movement
of the robot based on its locomotion, environment,
size, current and application.
3.1 Voltage Regulation
Due to the high efficiency of buck step-down type
regulators, table 1 is showing the characteristics of
the following devices that have been selected to
satisfy current requirements of approximately 2.5 A.
Table 1: Step-down voltage regulator.
Product Pololu D24V25F5 Pololu D24V50F5
V
in
6 a 38 Vdc 6 a 38 Vdc
V
out
5 Vdc 5 Vdc
Idc (max) 2.5 A 5 A
Efficiency 85% a 95% 85% a 95%
I
dc
in repose 0.7mA 0.8mA*
Inv. voltage
protection
yes yes
Size 17.8x17.8x8.8mm 17.8x20.3x8.8mm
3.2 Microcontroller
The microcontroller selected was based on its 16-bit
architecture; additionally, it has CAN communica-
tion protocol incorporated as a final purpose of
control and position of the servomotors.
Table 2: Microcontroller parameters.
Parameter Value
Architecture 16-bits
CPU speed 30 MPS
Type of minority Flash
Memory 48 KB
RAM 2 KB
Temperature range -40 a 125
o
C
Operating Voltage 2.5 a 5.5 V
I/O Ports 30
Number of ports 40
Digital peripherals 2-UART, 1-SPI; 1-I2C
Analogue peripherals 1-A/D, 9x10-bits; 1000 kps
Protocol (#, type) 1 CAN
Capture/Compare/PWM 4/4
Resolution PWM 16 bits
PWM Channels 6
Parallel port GPIO
3.3 Power Requirement
The selected batteries are grounded on the power
delivered, charging time and the space gap within of
the modules. The selected batteries are lithium-
polymer 72x34x14 mm 1000 mA, composed of two
cells of 3.7 volts for a total voltage of 7.4 V.
3.4 Communication Protocol
The proposed network protocol for internal
communication between the electronic systems is a
master-slave connexion. The CAN Bus was chosen,
based on uses by the automotive industry due to its
robustness protocol, which corrects transmission
errors and its invulnerability to electromagnetic
disturbances, thanks to its physical layer
requirements that are a shielded in a differential pair.
4 MATHEMATICAL ANALYSIS
Based on kinematic analysis the behaviour and
locomotion of a snake expresses the serpenoid
curves and their joint trajectories as follow:
(Hopkins, 2009) (Hirose, 2009) (Gong, 2015)
(Grøttum, 2017)
Figure 4 is showing the Denavit Hatenbertg joint
orientation and analysis; considering that the robots
is continues redundant all joints are identify in same
way as represented in the figure 4. The table 3 listed
the parameters of ai: length of the module 22.5 cm,
θi: angles of rotation maximum limit of 60o degree
and αi: joint orientation.
Table 3: Denavit Hatenbertg designation.
Joint θ
i
d
i
a
i
α
i
1 θ
1
0 L
1
90
o
2 θ
2
0 L
2
-90
o
3 θ
3
0 L
3
90
o
4 θ
4
0 L
4
-90
o
5 θ
5
0 L
5
90
o
6 θ
6
0 L
6
90
o
7 θ
7
0 L
7
90
o
8 θ
8
0 L
8
-90
o
9 θ
9
0 L
9
90
o
10 θ
10
0 L
10
-90
o
11 θ
11
0 L
11
90
o
12 θ
12
0 L
12
-90
o
13 θ
13
0 L
13
90
o
14 θ
14
0 L
14
90
o
15 θ
15
0 L
15
90
o
16 θ
16
0 L
16
-90
o
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
498
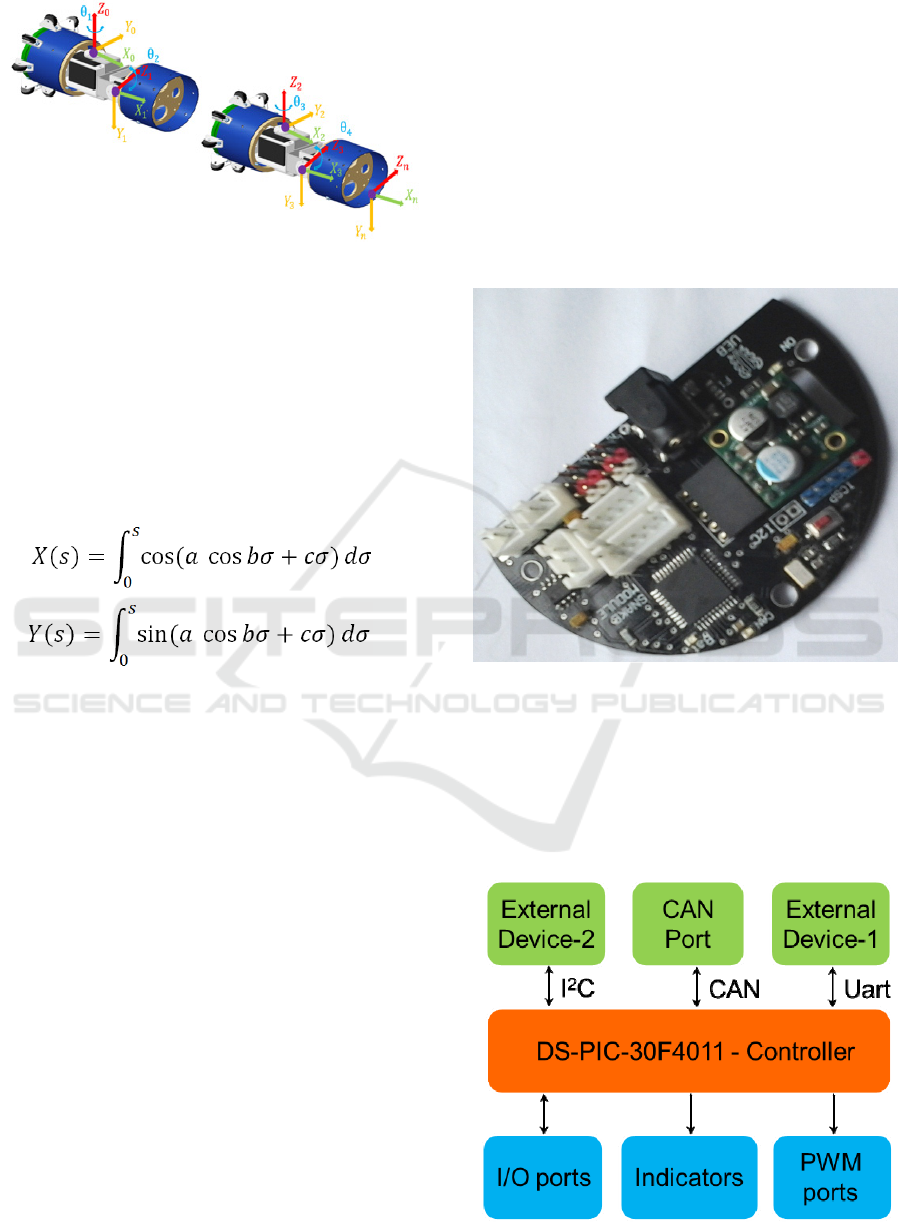
Figure 4: Denavit Hatenbertg designation.
4.1 Serpenoidal Curves Analysis
The following equations express the serpenoid
curves proposed by Hirose. The length of the
segment along the serpent is represented by S; a, b
and c are parameters that determine the shape of the
curve. σ represents the position of the curve, a
specifies undulation, b periods and c the angular
speed.
(1)
(2)
These equations only describe a continuous
curve, but actual snake robot has a finite number of
links, that is why it is necessary to know the articular
trajectories to imitate a continuous curve.
4.2 Articular Trajectories
The joint trajectories determine the angles that the
joints must develop over time to generate a
serpenoid curve; these equations are those which are
executed by the microcontrollers on each electronic
card in order to control the angles of the
servomotors. The equation (3) contains a new
component ω, which is determined by 2πf, where f is
the frequency with the curve generated by equations
(1) and (2). (Mohammad, 2009) (Hirose, 1993) the
equation 3 is mathematical derivate based on (1) (2).
∅_i (t)=2α.sin〖(ωt+(i-1)β)+γ〗 (3)
Where: (4), (5) and (6) come from the same
parameters a, b and c of the serpenoid curve, ω
indicates the speed of motion α is the amplitude , β
specifies the phase shift between the joints and γ is a
joint offset (Mohammad, 2009)
β = b/n (3)
γ = (-c)/n (4)
α=2a| sin (β/2) | (5)
As a result: i, is the number of the joint, that is,
the first joint will have an equation with i = 1, the
second with i = 2 and so on.
5 ANALYSIS AND RESULTS
Figure 5: Master-Slave card developed.
The figure 5 showing the real electronic card
implemented in each mechanical module of the
robot structure. This card execute the master or slave
control condition; the result is been done with a
single card design allows to be configured as a
master or slave according to the needs. Each card is
Figure 6: Block diagram of the electronic card.
Progression of Electronic and Communication System for Motion Control of Modular Snake-like-Robot
499
identifying with an internal code that permits to
know its location on the robotic structure.
The control and communication system of the
developed card is presented in figure 6; this shows
the diagram of any device with 5V supply voltage
and logic, such as RF, Bluetooth, wifi modules that
support the TTL/UART interface. The diagram also
showing the following the communication protocols:
CAN; UART, I2C that allow controlling any device
such as sensors, servomotors, LEDs, etc. all them
that support at the same time by the interface.
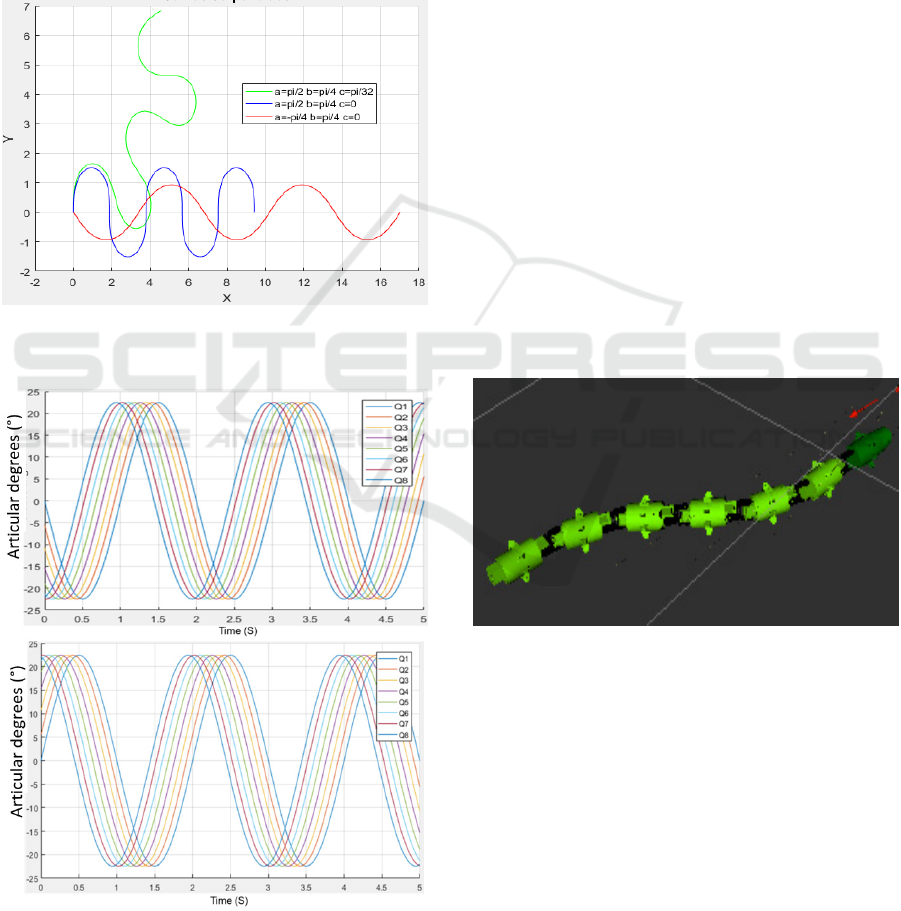
Figure 7: Simulation of trajectories behaviour and
locomotion of the modular snake-type robot.
Figure 8: Top: Articular angles with respect to time: a=-
pi/4, c=pi/2, w=2pi*(0.5); Bottom: Articular angles with
respect to time: a=pi/2, c=pi/2, w=2pi*(0.5).
Figure 7 is showing multiple serpenoid curves
generated by the modification of different
parameters in control, such as: frequency, amplitude
and phase shifting.
Figure 8 top, is showing the simulations of each
joint of the robotic system covering the joint angles
(Q1 to Q8) with respect to time with different
parameters a, b and c, based on equations 1 and 2. In
addition figures 8 bottom is showing the path of
each of the joint modules to complete the serpenoid
curve; it should be notice that if these graphs were
developed with N=7, (number of modules or links)
the results would be similar.
6 SIMULATION OF ROBOT
KINEMATICS
The simulation includes the implementation of the
joint trajectories in the mechanical modules of the
robot. As a result, the robot design has been taken to
the URDF format compatible by the RVIZ simulator
and through the publisher and subscriber of ROS.
The described angles previously and the equations
produce the simulated trajectories on RVIZ.
(Sanfilippo, 2017; Stavdahl, 2017).
Figure 9: Result of robot simulation developing serpenoid
curve in RVIZ-ROS.
The figure 9 is showing the executed simulation
in RVIZ, in addition is validating that the robot
could move in a serpentine way. However, in this
first implementation, aspects such as the weight of
the robot, friction and floor uniformity were not
considered.
Figures 10 show the final implementation of the
locomotion by the snake-like-robot based on the
serpentine movements. Further research and word
needs to be implemented in other to improve and
produce uniform and soft motion fr better
performance. Nevertheless, the control cards with
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
500

CAN communications were well executed by the
controllers, which were the aim of this preliminary
research.
a b
c d
e f
Figure 10: Motion sequence of robot like snake.
7 CONCLUSIONS
This project presents in a superficial way the design
criteria for a particular electronic system to control a
robot, these must cover its processing unit such as
the microcontroller, its power supply and regulation,
the peripherals must be contemplated, either that if
we want to use sensors; it should follow the rules as
those established in IPC-2221 to develop PCBs with
high quality standards.
The project presents the importance of a
mathematical analysis in terms of robotics and its
respective simulation to check its effectiveness.
However, there is a huge gap between the simulation
and the real, since some physical variables did not
contemplated precisely. For effective development
of a robot, physical parameter such as torque of the
joints is mandatory.
The advantage with this kind of development is
that the design of the hardware and the robotic
mechanism would conform to requirements of a
particular application without exceeding the
parameters of the criteria of design, which would
compromise the budget of any project on the other
hand, designing all the system will take more time to
get the robot ready for its purpose.
Newer and more robust snake-robots, would get
over the robots with active wheels for pipeline
inspection, because of these robots do not rely on the
wheel traction but the motion of its entire body,
giving them the possibility to slither where wheels
would get stuck.
ACKNOWLEDGEMENTS
This project sincerely thanks the contributions made
for the development of the control cards by the
researchers: Michael Canu, Cecilia Murrugara; and
especially to the Researcher Juan David Hernández
of the University of Girona for his valuable
contribution and knowledge in the management and
control of ROS.
REFERENCES
Aksel A. Transeth, Remco I. Leine, Christoph Glocker and
Kristin Y. Pettersen; 2008; 3D Snake Robot Motion:
Nonsmooth Modeling, Simulations, and Experiments,
IEEE transactions on robotics, vol. 24, no. 2, April
2008.
Aries Industries; (Online accessed: march 13th 2018);
http://www.ariesindustries.com/
Progression of Electronic and Communication System for Motion Control of Modular Snake-like-Robot
501

Biorobotics laboratory; (Online accessed: march 15th 2018);
http://biorobotics.ri.cmu.edu/projects/modsnake/
Dowling Kevin J.; 1997; Limbless Locomotion: Learning
to Crawl with a Snake Robot, The Robotics Institute
Carnegie Mellon University and NASA Graduate
Fellowships, December 1997.
Gong Chaohui, Travers Matthew J., Astley Henry C., Lu
Li, Mendelson Joseph R., Goldman Daniel I. and
Choset Howie; 2015; Kinematic gait synthesis for
snake robots; The International Journal of Robotics
Research 1–14, DOI: 10.1177/0278364915593793.
Grøttum Stian Danielsen; 2017; Perception-Driven
Obstacle-Aided Locomotion for snake robots, linking
virtual to real prototypes; Norwegian University of
Science and Technology.
HiBot; (Online accessed: march 13th 2018);
https://www.hibot.co.jp/ecommerce/prod-detail/8
Hirose Shigeo; 1993; “Biologically Inspired Robots:
Snake-like Locomotion and Manipulators”, Oxford
University Press.
Hirose Shigeo and Yamada Hiroya; 2009; Snake-Like
Robots, Machine Design of Biologically Inspired
Robots, IEEE Robotics & Automation Magazine,
March 2009
Hopkins J. K., Spranklin B.W. and Gupta S.K.; 2009, A
survey of snake-inspired robot designs. Bioinspiration
and Biomimetics, 4(2):021001.
Ibak; (Online accessed: march 13th 2018)
http://www.ibak.de
Ijspeert A.J. and Crespi A.; 2007; Online trajectory
generation in an amphibious snake robot using a
lamprey-like central pattern generator model,
Proceedings of the 2007 IEEE International
Conference on Robotics and Automation (ICRA 2007),
pages 262-268,
Micu Alexandru; 2018; Research of snakes’ straight-line
movement could power the rescue bots of the future;
(Online accessed: January 15th, 2018); https://www.zm
escience.com/science/snake-movement-straight-line/
Mohammad Dehghani; 2009; A Modified Serpenoid
Equation for Snake Robots; IEEE International
Conference on Robotics and Biomimetics; DOI:
10.1109/ROBIO.2009.4913248.
Rausch Electronics USA; (Online accessed: march 13th
2018); http://rauschusa.com/
Rollinson David; 2014; Control and Design of Snake
Robots; School of Computer Science Carnegie Mellon
University.
Sanfilippo Filippo, Stavdahl Øyvind and Liljeback Pal;
2017; SnakeSIM: A Snake Robot Simulation
Framework for Perception-Driven Obstacle-Aided
Locomotion; Proceeding of the 2nd International
Symposium on Swarm Behavior and Bio-Inspired
Robotics (SWARM), Kyoto, Japan.
Stavdahl Øyvind; Sanfilippo Filippo, and Liljeback Pal;
2017; SnakeSIM: a ROS-based Rapid-Prototyping
Framework for Perception-Driven Obstacle-Aided
Locomotion of Snake Robots; Proceeding of the IEEE
International Conference on Robotics and
Biomimetics (ROBIO 2017).
Sugita Saori, Ogami Kazunori, Guarnieri Michele, Shigeo
Hirose, and Kensuke Takita; 2008; A Study on the
Mechanism and Locomotion Strategy for New Snake-
Like Robot Active Cord Mechanism–Slime model 1
ACM-S1, Journal of Robotics andMechatronicsVol.20
No.2.
Wright Cornell, Buchan Austin, Brown Ben, Geist Jason,
Schwerin Michael, Rollinson David, Tesch Matthew,
and Howie Choset; 2012; Design and Architecture of
the Unified Modular Snake Robot, 2012 IEEE
International Conference.
Yamada Hiroya and Hirose Shigeo; 2009; Study of a 2-
DOF Joint for the Small Active Cord Mechanism,
2009 IEEE International Conference on Robotics and
Automation Kobe International Conference Center,
Kobe, Japan, May 12-17, 2009.
Yu Shumei, Ma Shugen, Bin Li, Wang Yuechao; 2009;
An Amphibious Snake-like Robot: Design and Motion
Experiments on Ground and in Water, Proceedings of
the 2009 IEEE International Conference on
Information and Automation, June 22 -25, 2009,
Zhuhai/Macau, China.
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
502
