
Dockemu: Extension of a Scalable Network Simulation Framework
based on Docker and NS3 to Cover IoT Scenarios
Ant
´
on Rom
´
an Portabales
1
and Mart
´
ın L
´
opez Nores
2
1
Quobis Networks, O Porri
˜
no, Spain
2
Department of Telematics Engineering, Universidade de Vigo, Vigo, Spain
Keywords:
ns-3 Network Simulation Docker Real-time Containers.
Abstract:
The purpose of this project was to extend an existing open-source simulation framework called Dockemu in
order to make it suitable to perform IoT simulations. The work covered some improvements with goes from
the support of more network technologies to the use of setup and deployment tools used by modern devops
professionals. The paper explains the architecture, the newly-added features and the specific advantages it
offers for research works in IoT network simulations.
1 INTRODUCTION
The Dockemu project was initially described by
Marco Antonio To, Marcos Cano and Preng Biba in
(To et al., 2015). It proposes a simulation approach
where the nodes can run any client/server Linux soft-
ware which is executed in a Linux container and the
network is simulated used using the open source net-
work simulator ns-3
1
.
The Dockemu implementation used to add the ex-
tensions described in this work was published by J.A.
´
Alvarez Aldana in Github
2
. The main features of
Dockemu simulation framework are as follows:
• It allows to use real software in the simulated
nodes, removing the extra effort needed to create
ad-hoc simulation software and ensuring more ac-
curate results.
• It is based on open-source projects and the project
itself is open-source, so it can be used and ex-
tended by anyone at no cost and with total ac-
cess to the code which is considered to be more
effective and cost-efficient for research works.
(G Gupta et al., 2013).
• It has a very quick set-up time through a com-
pletely automated procedure, minimizing the time
the researcher needs to invest in tasks not directly
related with the experiments at hands.
• The tools available for the exchange of Docker
1
https://www.nsnam.org/
2
https://github.com/chepeftw/NS3DockerEmulator
containers make it very easy to replicate experi-
ments, thus facilitating the validation and analysis
of the results included in any publication.
Owing to these facts, Dockemu fosters greater re-
alism, reproducibility and representativeness in net-
work simulations. It supports the most relevant net-
work technologies, and more are expected to be added
in the future.
The goal of the extension described in this pa-
per is to enable simulations of different IoT scenar-
ios that can not be covered with the current version
of Dockemu. Those scenarios include more complex
topologies, including different types of application
(e.g. client-server) in the same simulation, and uses
of network technologies typically found in IoT net-
works, namely LTE and 6lowpan over IEEE 802.15.4.
This work describes the extensions and the rationale
behind the additions of new features needed to con-
duct experiments that aim to benchmark IoT proto-
cols and measure the impact of the modification of
different network and protocol-specific parameters.
3
The key technologies used to implement Dockemu
are Linux containers and ns-3.
Both Linux containers are ns-3 are briefly de-
scribed in Section 2. Then a short state-of-the-art sec-
tion discusses the existing alternatives to perform IoT
simulations. In Section 4 we cover the new features
3
All the changes implemented in Dockemu will be re-
leased under GPLv3 license, including the experiments re-
ported in the paper. This tries to follow good practices
(Patrick Vandewalle and Vetterli, 2009) in terms of re-
search impact and reproducibility.
Portabales, A. and Nores, M.
Dockemu: Extension of a Scalable Network Simulation Framework based on Docker and NS3 to Cover IoT Scenarios.
DOI: 10.5220/0006913601750182
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 175-182
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
175

added to the existing Dockemu framework and in Sec-
tion 5 we describe the main implementation details.
The paper ends in Section 6 with conclusions and fu-
ture lines to further enhance Dockemu.
2 TECHNOLOGY BACKGROUND
Container-based virtualization and application con-
tainerization is an Operating System (OS) level vir-
tualization method for deploying and executing dis-
tributed applications without launching a different
VM for each application. The application executed
in the containers uses the same lower layers of the OS
like the rest of applications, but in an isolated run-
time environment. Linux containers take advantage
of namespace and cgroups resource isolation features
provided by the Linux kernel.
Docker takes advantage of the aforementioned
features to provide a complete framework to create
and execute Linux containers. Docker enables the ex-
ecution of a huge number of isolated containers in a
single server. This is the main reason why we consid-
ered containers to be the best approach to run the real
software to be tested in our simulations, since IoT sce-
narios normally require a big number of network end-
points. Using Virtual Machines would require much
more resources, by far (Sharma et al., 2016). The
overhead of virtual machines is even more noticeable
in IoT, since applications in this realm have to run in
constrained devices, so they are expected to be light
in terms of CPU and RAM usage.
Apart from the low use of resources of contain-
ers, the use of Docker also facilitates the creation of
images which contain all the required software to be
tested. These can be created from scratch, or derived
from existing container images used during the devel-
opment phase of the project to be automatically tested
by CI (Continuous Integration) systems or by the de-
veloper herself. Currently, there are Docker images
available to be used as development environments
for the most common IoT operating systems, such as
Contiki OS
4
and FreeRTOS
5
. The same Docker con-
tainer which is used to develop and test IoT applica-
tions can be directly connected to Dockemu.
The other key technology of Dockemu, ns-3, is a
discrete event simulator (DES) designed for the sim-
ulation of data networks of different technologies and
topologies. It is targeted primarily for research and
educational use and open-source software, licensed
under the GNU GPLv2 license, therefore publicly
4
https://github.com/contiki-ng/contiki-ng/wiki/Docker
5
https://github.com/megakilo/FreeRTOS-Sim
available for research, development and use. There
are other open-source network simulators, but ns-3
has been considered one of the best in terms of per-
formance of use of CPU and RAM (ur Rehman Khan
et al., 2013). A key feature of ns-3 is a real-time
scheduler for simulation events which locks the sim-
ulation clock with the hardware clock. This real-time
feature and the ability to generate real network pack-
ets which its respective checksums enable the inte-
gration of ns-3 with real network stacks which and
emit/consume packets.
Furthermore, ns-3 enjoys a great diversity of mod-
ules to simulate different parts of data networks.
Many modules allow to simulate different network
technologies implementing realistic models. There
are also modules not related with the networking it-
self but with other characteristics of the simulation
such as the mobility model, which allows to simu-
late mobile nodes deployed in a specific area. One of
these modules is the Tap NetDevice
6
, which enables
the connection of a OS-level tap interface with a node
of the ns-3 simulation.
In section 5 we will see how both the real-time
feature and Tap bridge module are key characteristics
of ns-3 used by Dockemu to be able to run simula-
tions.
3 STATE OF THE ART
Simulation of IoT networks has been widely dis-
cussed by the research community which has de-
scribed a number of requirements every simulation
and experimentation platform should meet in order to
provide realistic and valuable results. (Gluhak et al.,
2011) gathers a comprehensive list of those require-
ments:
• Scale: IoT simulations would normally involve a
very big number of nodes;
• Heterogeneity: different network technologies,
topologies, type of devices and applications must
be supported;
• Repeatability: experiments must be easily re-
peatable with the same results;
• Federation: testing platforms should be able to
federate to each other in order to simulate bigger
systems.
• Concurrency: several experiments should be
able to be performed at the same time;
6
https://www.nsnam.org/doxygen/grouptap-bridge.html
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
176

• Mobility: the platform must be able to simulate
mobile nodes as this is going to be normal behav-
ior of many IoT devices;
• User Involvement and Impact: experiments
which involves humans should be able to evalu-
ate its social impact and acceptance.
Though those requirements were initially considered
for experimentation testbeds many of them can be ap-
plied directly or adapted to pure of hybrid
7
IoT simu-
lations.
Regarding the simulation technologies to be used,
DESs have been identified as valid tools in order to
simulate the network, but in order to take advantage
of multi-CPU and distributed networks (D’Angelo
et al., 2016) it is necessary to implement Parallel
and Distributed Simulation (PADS)
8
. The authors
of (D’Angelo et al., 2016) also proposed the use of
multilevel simulations, where some parts of the sys-
tem are simulated in more detail and other parts are
simulated at a higher level in order to save computa-
tional resources.
There are several proprietary simulators, such as
SimpleIoTSimulator
9
, that claim to be able to simu-
late thousands of sensors implementing different IoT
protocols. No technical details about the simulation
techniques used are disclosed. Rather, the sensors are
pre-built and the code is proprietary, so it is not re-
ally usable in typical research environments. Another
commercial alternative is Netsim
10
, a generic network
emulator that can emulate a network of different tech-
nologies and connect real applications to it, however
it does not handle the setup of the complete scenario.
It allows to modify its source code to implement cus-
tomized protocols to licensed users.
ns-3 has been already use in other simulation
frameworks such as Cupcarbon
11
. This is a open-
source IoT and smart city simulator that allows to
simulate a network of sensors deployed in a city with
geographic models
12
. It is largely focused on smart
cities and sensor networks, and it does not support the
simulation of customized applications.
Node-RED
13
is an open-source flow-based pro-
gramming tool which is part of the JS Foundation
14
.
Flow-based programming is a way of describing the
7
We use the term hybrid to refer to simulations where some
of the elements is not simulated but a real element, like the
client/server software in Dockemu.
8
ns-3 supports distributed simulations as explained in 6.1.
9
http://www.smplsft.com/SimpleIoTSimulator.html
10
https://www.tetcos.com/
11
http://www.cupcarbon.com/
12
https://github.com/bounceur/CupCarbon
13
https://nodered.org/
14
https://js.foundation/
behavior of an application as a network of black
boxes. Each black box has a well-defined purpose
and exchanges data with other connected boxes. This
high-level, functional style of specifications allows
the system behavior to emerge from simplified model,
but it does not deal with neither implementation nor
low-level networking models.
Finally, the most extreme approach in terms of
simulation is to use a very large scale open testbed
with thousands of real wireless sensors. This is the ap-
proach followed by FIT/IoT-Lab
15
which consists of
thousands of real IoT wireless sensors spread across
six different sites in France. The IoT-LAB is open to
research experiments under request.
4 NEW FEATURES ADDED TO
SUPPORT IOT SIMULATIONS
This section gathers all the new features and technolo-
gies we have added to the Dockemu framework within
the scope of this work in order to improve its suitabil-
ity for advanced IoT simulations and be able to simu-
late a wider range of scenarios.
4.1 LTE and 6lowpan Over 802.15.4
IoT emulation requires to support a huge number of
nodes as there would be in a real environment and
also network topologies using adapted technologies
as LTE and 6lowpan over 802.15.4. We included sup-
port for both in Dockemu by leveraging the LENA,
lr-wpan and 6lowpan modules of ns-3. The initial ver-
sion Dockemu only supported CSMA (model equiv-
alent to Ethernet in terms of simulation) and WiFi
(802.11), which are not particularly relevant to em-
ulate IoT scenarios.
Both LTE and 6lowpan over 802.15.4 topologies
support mobility, so scenarios where the nodes are not
static are supported taking advantage of ns-3 mobil-
ity model library
16
. This feature could be especially
interesting to simulate connected car scenarios. The
type of simulations covered by both technologies is
different. LTE can cover wide areas, leveraging the
operator infrastructure and relatively expensive de-
vices with SIM card and LTE wireless module which
can send and receive high bandwidth traffic. In turn,
6lowpan over 802.15.4 is used in small areas to re-
ceive and send information to low power constrained
devices. Actually a combination of two modules –
which is still not possible in Dockemu– would make
15
https://www.iot-lab.info/
16
https://www.nsnam.org/docs/models/html/mobility.html
Dockemu: Extension of a Scalable Network Simulation Framework based on Docker and NS3 to Cover IoT Scenarios
177

sense to cover even more realistic scenarios where
a PAN coordinator receives data from remote sen-
sor connected to small devices and this information
is sent to a cloud service using LTE.
4.2 Different Types of Nodes
The initial version of Dockemu only considered a sin-
gle type of node. We have added the capacity to de-
fine different types of nodes (e.g. scenarios where one
node is a server and the rest of nodes act as clients).
This allows, for example, to simulate for IoT proto-
cols such as COAP(Bormann and Shelby, 2016) and
MQTT
17
where the nodes can play different roles.
Scenarios where there is more than one server can
even be easily supported, too. In order to create the
different type of nodes the Docker container must be
created with the right software or configuration.
4.3 Ansible as Scenario Deployment
Tool
The initial setup as well as the scenario setup is a
complex process which involves several software el-
ements and configuration files. Ansible –deployment
and orchestration software supported by Red Hat– has
become an important tool for devops engineers (Ebert
et al., 2016) to deploy services since its release in
2012 and it is being used to automate the setup of
complex architectures such as NFV-based platforms.
The fact that it is a de facto standard tool, together
with the ease to add new features using existing and
well-tested modules, makes it a suitable choice to
manage the orchestration of the Dockemu framework.
It also allows to replicate the simulation environment
in different Linux distributions so it makes the project
more portable. These are the reason why we decided
to adopt Ansible in Dockemu as the deployment and
scenario setup tool.
5 IMPLEMENTATION
5.1 Configuration File
In order to control the parameters of the simulation we
had to extend the parameters included in the reference
configuration file. The configuration file is written in
YAML format, which makes it easy to understand and
modify.
17
http://docs.oasis-open.org/mqtt/mqtt/v3.1.1/csprd02/mqtt-
v3.1.1-csprd02.html
Listing 1: Dockemu reference configuration file.
#DOCKEMU c o n f i g f i l e
g e n e r a l :
w a f p a t h = / home / u s e r / ns − 3.22
l o g g i n g = t r u e
v e r b o s e = f a l s e
l o g f i l e = l o g s / . l o g
c o n t a i n e r L o g s =/ v a r / l o g s / c o n t a i n e r s
r unningTim e =300
t e m p l a t e E t h e r n e t = ns3 / t a p − e t h e r n e t
t e m p l a t e W i F i = n s 3 / tap − w i f i
temp l a t eLTE = ns3 / t a p − l t e
t e m p l a t e 6 l o w p a n = n s3 / ta p −6lowpan
m o b i l i t y :
m o b i l i t y p a t t e r n =1
node s :
n u m b e r C l i e n t C o n t a i n e r s : 5
n u m b e r S e r v e r C o n t a i n e r s : 1
c l i e n t D o c k e r f i l e : n s 3 / d o c k e r / c D o c k e r f i l e
s e r v e r D o c k e r f i l e : ns3 / d o c k e r / s D o c k e r f i l e
n e t w o r k i n g :
t o p o l o g y : e t h e r n e t
ipv4 N e t work : 1 0 . 6 . 6 . 0 / 2 4
ipv6 N e t work : 2 0 0 1 : DB8 : : / 3 2
Once the configuration file has been provisioned
with the right values it is necessary to execute the
Dockemu from a terminal command, passing the con-
figuration file as a parameter:
$ sudo dockemu -c <conf file>
It is required to execute with sudo, since it is nec-
essary to create new bridge and tap interfaces. It is
also possible to set all the commands using the CLI
and passing all the settings defined in the configura-
tion file directly as parameters to the command.
5.2 Steps to Setup the Simulation
In order to set up the environment and prepare all the
elements needed by each simulation, Dockemu car-
ries out the following tasks:
1. Build the container images for client and server
from the Dockerfiles specified in the configura-
tion. These Dockerfiles must be edited by the
authors/testers of the software to be tested in the
simulation.
2. It sets the right ns-3 simulation file and does the
required modification in the C++ file if required
according to the configuration settings.
3. It starts one container running per client and
server nodes defined in the configuration file.
4. It creates all the tap and bridge interfaces required
to link each container with the ns-3 simulation.
5. It assigns the IP addresses to be used during the
simulation to each node.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
178
6. Once the steps below are completed the simula-
tion starts for the duration specified in the config-
uration file.
5.3 Networking Setup
The networking setup requires the creation of as many
bridges and tap interfaces as containers are in the sim-
ulation. The number of containers corresponds with
the number of nodes desired in the simulation, and it
may change from one simulation to another; so, the
creation/deletion of bridge and tap interfaces most be
done on demand. The number and type of nodes is
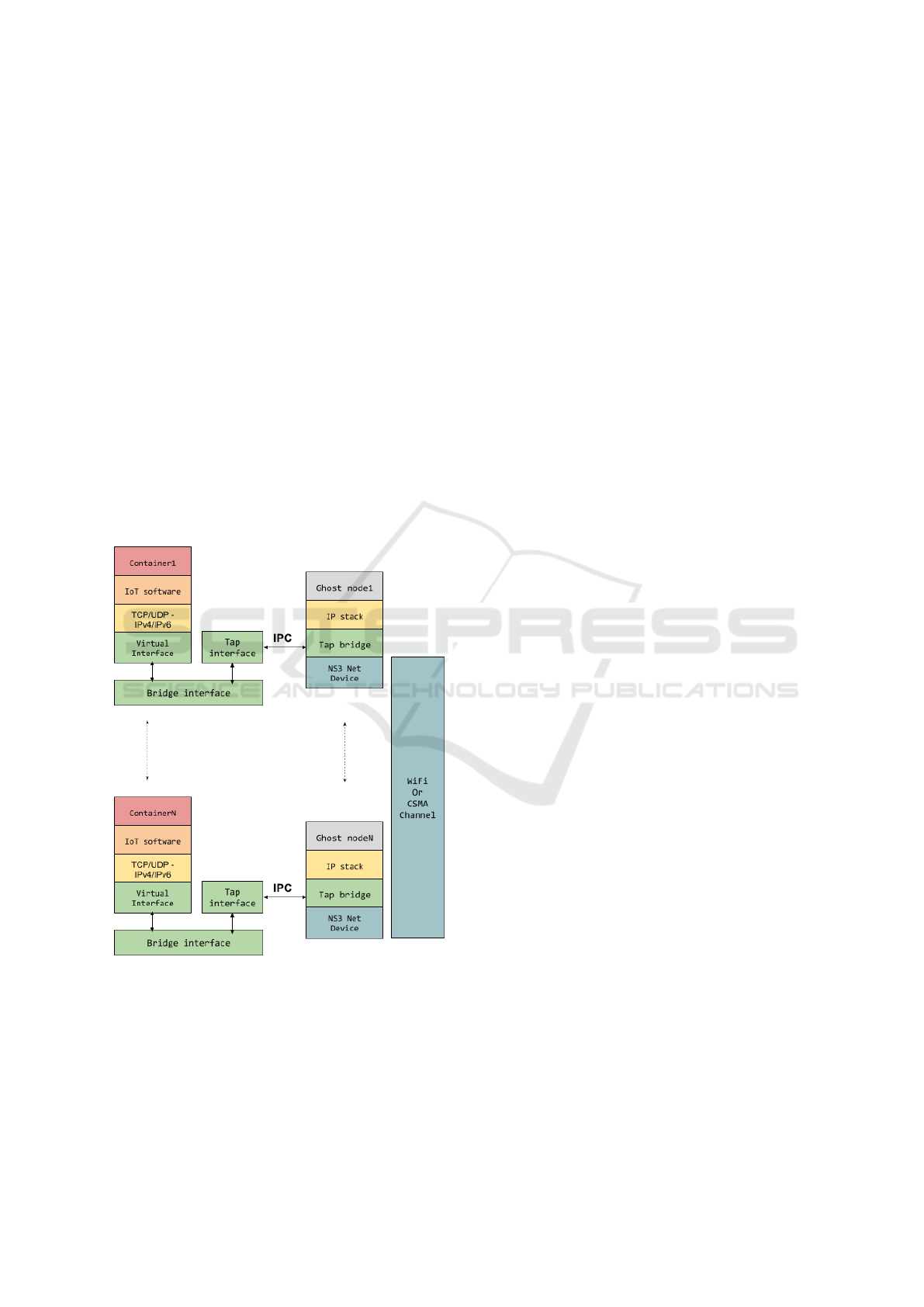
passed as a parameter. As shown in Figure 1 the vir-
tual interfaces and the corresponding tap interfaces
are connected using a bridge interface and the tap
bridge object within the ns-3 topology is associated
in turn to its corresponding bridge.
Dockemu takes advantage of the Network names-
pace feature of the Linux Kernel (Pino, 2018) to as-
sign IPv4 and IPv6 IP addresses to each container.
Figure 1: Connectivity between containers and ns-3 ghost
nodes for Ethernet (CSMA) and WiFi.
5.3.1 IPv6 Support
In order to support IPv6, an IPv6 address has been
added to the Network Space interface created for each
container. This way each container will use directly
this IP so the application can be tested with a real IPv6
like in a real network. The connection with ns-3 hap-
pens at Data Link layer so it is not necessary to handle
it in the OS interfaces. Special attention needs to be
put on the routing configuration of ns-3 as it has some
differences respect to IPv4 routing.
5.4 LTE Support
The only ns-3 networking technologies that support
tap bridge are WiFi and CSMA, so a LTE network
can not be directly connected to the container through
network interfaces. In order to connect the container
with the ns-3 simulation, we have followed the ap-
proach described and validated in (Hasan et al., 2017).
A CSMA link with a huge bandwidth and very low
latency is used to connect the tap interface and the
UE node in the simulation as depicted in Figure 2.
Each container is connected through a bridge with the
tap interface installed in a ghost host, connected in
turn using the high-bandwidth and very low latency
CSMA link. As the CSMA effect is minimized in
terms of simulation, it will not add a measurable delay
nor will lose any packets. This approach can be fol-
lowed to simulate more network technologies which
can not be connected directly to tap bridge interfaces.
Our implementation allows to connect each con-
tainer to a UE node, so it simulates the execution of
the application in a device with LTE interface. In
our initial version all the devices are connected to the
same enbNode, but nothing prevents from using sev-
eral enbNodes in the future, since this is supported by
ns-3 LENA module (it has been designed to support
from tens to hundreds of eNBs and from hundreds to
thousands of UEs, so it is suitable for almost any IoT
simulation). The current implementation also allows
to create a different role for a server application which
may exist or not.
The diagram 2 depicts the general architecture of
the system.
5.5 LR-WPAN and 6lowpan Support
Low-rate wireless personal area networks (LR-
WPANs) are widely used in IoT deployments as they
focus on low-cost, low-speed ubiquitous communi-
cation between constrained devices with low-power
requirements. IEEE 802.15.4 is a technical standard
which defines the physical and MAC (Medium Ac-
cess Control) layers of LR-WPANs. Other higher-
level layers and interoperability sublayers are not de-
fined in the standard. Specifications, such as 6LoW-
PAN, SNAP, Thread and ZigBee define the layers not
covered by IEEE 802.15.4 to implement usable LR-
WPANs.
Dockemu: Extension of a Scalable Network Simulation Framework based on Docker and NS3 to Cover IoT Scenarios
179
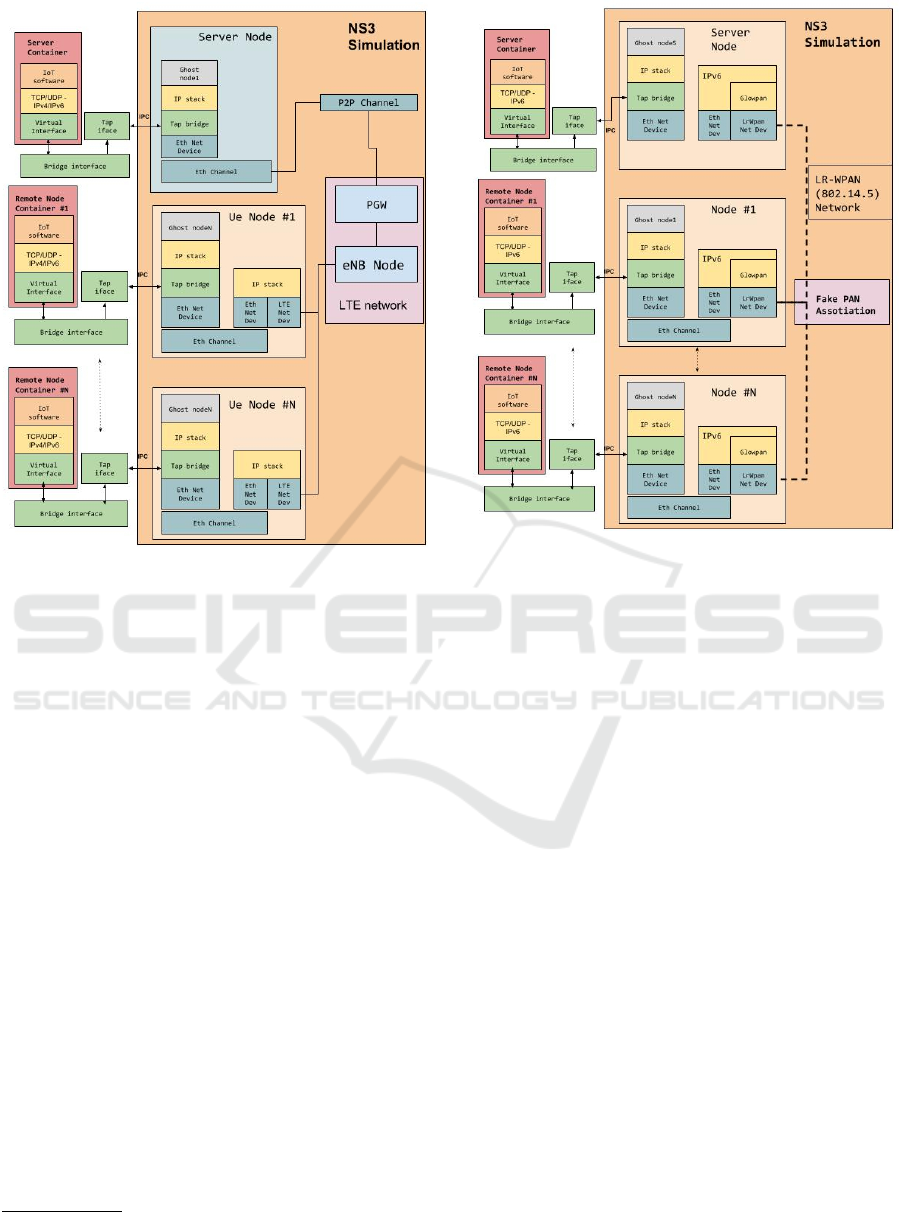
Figure 2: Block diagram of ns-3 configuration to simulate
LTE network with N UE and a server nodes.
ns-3 has a 6lowpan module, which was used
jointly with the lr-wpan module (which implements
part of the 802.15.4 standard) in order to simulate a
LR-WPAN network. Figure 3 depicts the architecture
we use to simulate this type of network. It is pretty
similar to the architecture used to simulate the LTE
scenario: the ns-3 tap-bridge is connected to a ghost
node which is connected using an Ethernet
18
. In this
architecture the Node container must send the traffic
in IPv6 directly. This IPv6 traffic is sent through a
very low latency and high bandwidth link to the node
which sends the traffic to the LR-WPAN network, af-
ter passing through a 6lowpan layer to adapt the pack-
ets to the 127-byte maximum size defined by 802.15.4
standard. In order to associate all the nodes to the
same network, a fake PAN association is forced in
the configuration. In a real network this association
would be automatically set up by one of the nodes of
the network playing the role of PAN coordinator.
5.6 Docker Setup
In order to execute the software of server and client
nodes, Dockemu uses Docker containers. This way
18
The name of the module used to simulate wired Ethernet
networks in ns-3 is called CSMA.
Figure 3: Block diagram of NS3 configuration to simulate
LTE network with N UE and a server nodes.
a relatively high number of nodes can be simulated
at low computational cost (especially considering that
the software is expected to have been designed to be
executed in constrained devices). For the sake of sim-
plicity and to cover the most common simulation sce-
narios, the current version allows to deploy one node
with the role of server and a configurable number of
nodes with the role of client. With this setup we can
cover a wide range of IoT simulation scenarios.
It is necessary to build the Docker images which
will be instantiated as containers at the beginning of
the simulation. In order to create the build, it is neces-
sary to write one Dockerfile for the server and another
one for the clients. The creation of this Dockerfile
does not differ from a regular file for other types of
containers. It must leave the service running as if it
would be in a real device of server. Therefore the sim-
ulation will also validate the implementation of the
IoT software.
5.7 Software Deployment Automation
Several solutions to automate the deployment of soft-
ware such Puppet, Chef and Ansible have appeared
in the last years. They are intensively used in de-
vops tasks. The initial version of Dockemu was im-
plemented using different Bash scripts to set up the
environment (creation of tap and Bridge interfaces
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
180

and edition of the C++ ns-3 simulation script) and a
Python main script which controls the execution of
the simulation.
We have used Ansible to carry out all the envi-
ronmental tasks and the logic was left in the Python
script. Using Ansible instead of Bash scripts has a
number of advantages:
• the simulation can be easily deployed in any
server, different from the OS where the main
script is being executed;
• it is idempotent, and therefore more efficient since
it only performs actions when needed reducing
setup time;
• it is declarative (not procedural), which added to
its smooth learning curve makes the playbook files
19
easier to read and modify;
• it will be possible to take advantage of new mod-
ules and features added to Ansible.
Once the simulation has finished, Ansible it is
also used to gather all the traffic exchanged by all the
nodes collected in PCAP files (except the LR-WPAN
traffic, which is collected in text files) and also the
logs generated by the client and server applications
executed in the Docker containers.
6 CONCLUSIONS
Dockemu provides a realistic and easy to setup sim-
ulation framework which meets the requirements of
a wide range of IoT simulations. It enables the use
of real client/server IoT software without any modifi-
cation by just creating a Docker container following
Dockemu guidelines to be included as a node in the
simulation.
The fact of using ns-3 to simulate the network
means a great advantage since it allows to use all the
exiting and future ns-3 modules to increase the num-
ber of simulation scenarios covered.
Dockemu can simulate different network tech-
nologies (WiFi, Ethernet, LTE and 802.15.4) and can
be used with different purposes:
• validate IoT software over realistic network con-
ditions;
• check the impact of modification in the applica-
tions or at any level of the network stack;
• carry out performance test of IoT software under
specific network conditions.
19
Playbook is the name given by Ansible framework to the
scripts where all the instruction needed to carry out a task
are written.
6.1 Future Lines
We have identified several work lines to improve and
complete Dockemu simulation in the future. These
tasks can be divided in three main groups:
1. Improvement of Existing Framework: this
group of tasks goes from improving and complet-
ing the documentation for the framework in or-
der to be used by others to including more config-
uration parameters for the simulation of the net-
work. This configuration parameters will give the
researcher more control about what is happening
on the wireless interfaces and enable the execu-
tion of more specific experiments.
2. Addition of More Complex Network Topolo-
gies and Support of More Network Technolo-
gies: the network topologies offered are pretty
static. The framework could be easily enriched
with more topologies and network technologies in
order to cover more scenarios.
3. Support of Parallel and Distributed Simula-
tion Mode: ns-3 supports parallel and distributed
modes for simulation. These modes can handle
a higher number of nodes which is essential to
cover IoT scenarios with more elements in or-
der to cover real-world scenarios. To support dis-
tributed simulation in ns-3, the standard Message
Passing Interface (MPI) is used. There is an exist-
ing module
20
which already supports it and which
makes use of the OpenMPI Linux library
21
.
REFERENCES
Bormann, C. and Shelby, Z. (2016). Block-Wise Transfers
in the Constrained Application Protocol (CoAP). RFC
7959 (Proposed Standard).
D’Angelo, G., Ferretti, S., and Ghini, V. (2016). Simulation
of the internet of things. CoRR, abs/1605.04876.
Ebert, C., Gallardo, G., Hernantes, J., and Serrano, N.
(2016). Devops. IEEE Software, 33(3):94–100.
G Gupta, S., Ghonge, M., D P M Thakare, P., and Jawand-
hiya, P. (2013). Open-source network simulation tools
an overview. 2.
Gluhak, A., Krco, S., Nati, M., Pfisterer, D., Mitton, N.,
and Razafindralambo, T. (2011). A survey on facili-
ties for experimental internet of things research. IEEE
Communications Magazine, 49(11):58–67.
Hasan, A. B., Kiong, T., Paw, J. K., Musa, A. B., and Mo-
hamed, H. (2017). Real-time video streaming over
ns3-based emulated lte networks. volume 4. Interna-
tional Journal of Electronics, Computer and Commu-
nications Technologies.
20
https://www.nsnam.org/docs/models/html/distributed.html
21
https://www.open-mpi.org/
Dockemu: Extension of a Scalable Network Simulation Framework based on Docker and NS3 to Cover IoT Scenarios
181

Patrick Vandewalle, J. K. and Vetterli, M. (2009). Repro-
ducible research in signal processing. IEEE SIGNAL
PROCESSING MAGAZINE, pages 37,47.
Pino, D. (2016 (accessed April 22, 2018)). Network names-
paces. https://blogs.igalia.com/dpino/2016/04/10/
network-namespaces/.
Sharma, P., Chaufournier, L., Shenoy, P., and Tay, Y. C.
(2016). Containers and virtual machines at scale: A
comparative study. In Proceedings of the 17th In-
ternational Middleware Conference, Middleware ’16,
pages 1:1–1:13, New York, NY, USA. ACM.
To, M. A., Cano, M., and Biba, P. (2015). DOCKEMU – a
network emulation tool. In 2015 IEEE 29th Interna-
tional Conference on Advanced Information Network-
ing and Applications Workshops. IEEE.
ur Rehman Khan, A., Bilal, S. M., and Othman, M. (2013).
A performance comparison of network simulators for
wireless networks. CoRR, abs/1307.4129.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
182
