
Development of a Robot for Boiler Tube Inspection
Md. Hazrat Ali
*
, Temirlan Zharakhmet, Mazghzhan Atykhan, Adil Yerbolat and Shaheidula Batai
School of Engineering, Nazarbayev University, 010000 Astana, Kazakhstan
Keywords: Robot, Boiler Tube, Coal-fired, Electric Plants.
Abstract: The maintenance and inspection of large vertical or horizontal tubes in an autonomous manner is still an
unsolved issue. Existing techniques can traverse various types of surfaces but cannot measure inner cracks
in a long tube. However, most of these techniques are restricted by accuracy level, type of construction
material and cost efficiency. This research is mainly focused on the studies of various types of design
investigations related to the climbing robots for the inspections, and design and development of a new robot
to solve the existing problem in measuring various pipes diameter in petroleum industries. Based on the
existing prototypes, a new type of adhesion, locomotion, sensor mechanisms and a modernized design was
accomplished. The importance of this work is to prevent hazardous failures, which probably can be
determined through the on-site analyses of the tubes. At this point, it is a laborious, time-consuming and
dangerous process, which is performed by the human being. Finally, a climbing robot based on duct fan is
designed and developed as a prototype. The thrust force, provided by the fan, ensures that the robot is not
falling while the DC motors generate the motion. The ultrasonic sensor is chosen for the defect detection. It
generates a reference signal of a proper tube and compares it to the signals received from the defected tubes.
The preliminary design and development of the robot are done in SolidWorks software together with the
available components in the market.
1 INTRODUCTION
The aging issue of civil architecture consisting
bridges, tunnels, and manufacturing communications
that mainly apply metal structures, pipes, and tubes,
has been a significant research topic of structural
health monitoring (SHM). The failure of inspecting
and anticipating the SHM of these constructions may
contribute to severe tragedies, such as Santa Barbara
oil spill (Kolpack,1969). Thus, obtaining the routine
inspection data, and further investigation is an
essential tool to figure out the sustainability of this
infrastructure. Considering Kazakhstani plants,
despite ongoing development in the robotics field,
most of the methods used for inspection of metal
structures are accomplished manually or even worse,
left without any evaluation. The proposed solution
for this issue is the robot which can be controlled
remotely, which means that it reduces any risks
associated with reaching difficult-to-access zones for
plant workers. The electronic components of the
robot should be able to detect the defects of the
structural units. The regular inspection of the tubes
and other structures is going to decrease the chance
of failure occurrence on the plant. This preventive
measure is not costly while it precludes high
expenses from the system breakdown. It is very
challenging and expensive to examine surfaces,
which are difficultly accessible, such as vertical
tubes in coal-fired electric plants. Present technology
of manual inspection is time consuming, costly, and
regularly needs the application of large scaffolds,
influencing human safety issues. The solution for
this is considered to be automated investigation
process which can be provided by a robot. Even
though a significant advancement in the robotics
field, it is not still fully developed to work in the
field. The robot should be able to move in a vertical
and horizontal direction and be able to inspect the
tube. It means that there should be a unique
technique for the robot to climb up and down and
specific sensors that will provide an appropriate
assessment of pipelines conditions. The research
focuses on creating an inexpensive prototype for
external inspection of pipes and other structures. A
robot based on Arduino board makes the inspection.
The key working principle of the robot is that it uses
ultrasonic sensor and camera to evaluate the health
534
Ali, M., Zharakhmet, T., Atykhan, M., Yerbolat, A. and Batai, S.
Development of a Robot for Boiler Tube Inspection.
DOI: 10.5220/0006930205340541
In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2018) - Volume 2, pages 534-541
ISBN: 978-989-758-321-6
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of the structure. The duct fan is applied to attach to
the surfaces and move in vertical directions. There
are two separate power sources for the Arduino and
duct fan as the duct fan requires more voltage to
work. The approximate cost for the prototype
development is $300, and the size is 250 mm x 250
mm x 100 mm.
2 LITERATURE REVIEW
The most cost-effective and troublesome
components of electric power, chemical, and
operating plants, which cause large expenses during
unscheduled breakdowns, adjustment work, are
boilers. Every existence of cracked tubes contributes
to an emergency shutdown of the whole plant. Thus,
the regular inspection of boiler tubes is carried out to
assure the operational safety and forbid the leakage
of hazardous substances to nature. Generally, the
investigation is performed manually or automatically
(Vakhguelt, Kapayeva, and Bergander, 2017). A
wall-climbing robot for the nuclear power plant is
discussed by Briones, L. et al. (1994). A marine
vessel inspection robot based on the magnet is
designed and developed by Markus Eich and
Thomas Vogele (2011). A fuzzy controlled based
similar robot for pipe inspection is proposed by
Huang, H. P., et al. (2010). Another paper discussed
an automatic inspection of ship hull by a magnetic
crawler using a camera (Annalisa et al., 2017).
2.1 Manual Type of Pipe Inspection
and Its Limitations
Manual type of pipe inspection is very challenging
and costly to investigate surfaces, which are
problematically attainable, as well as vertical pipes
in coal-fired electric plants. Present manual
techniques are time-consuming and commonly need
the utilization of vast scaffolds, which negatively
affects human safety issues (Advanced Pipe
Inspection, 2018).
2.2 Robot based Pipe Inspection and
Its Limitations
2.2.1 Internal Pipe Inspection Robot
Immersed pipes, generally used for gas pipelines,
cannot be investigated as conveniently as above-
ground pipes due to the excavation and refilling
effort involved. Namely, the ground must be
excavated before the investigation to expose all sides
of underground tubes located at depth. Then, the
ground must be backfilled after finishing the
analysis. All this work consumes a sufficient amount
of time beyond the time needed for the specific
investigation. The internal inspection robot proposes
the community the advantages that less time and less
operational cost are needed for the work. Thus,
interior surface inspection technologies are rapidly
being developed. However, there are several
problems with the interior surface investigation
performance of robots. Various limitations are
reported in the following paragraph (Kawaguchi et
al., 1995).
Figure 1: Manual inspection.
Problem 1: Robots operate in the most of the cross-
section of the pipe. Objects are standing in tubes, as
the plug valves, are challenging to handle for robots.
Robots usually cannot be driven through pipes of
certain types of diameters connected using reducers
or go through narrow paths, as valve position.
Problem 2: One of the most significant limitations
is that the supply, such as gas, hot water, which is
transferred through the conduits, is needed to be
switched off during pipe investigation. The
interruption not only adversely affects the
economics but also poses the risk of explosions due
to the interior of the tube is exposed to outside air.
2.2.2 External Pipe Inspection Robot
External climbing robots became more and more
significant in the engineering industry over the last
twenty years. The area of utilization of these robots
increases with their capability to traverse on
different surfaces and to operate faster and more
detailed. Currently, climbing robots are examined to
support the investigation, maintenance and building
tasks everywhere due to new locomotion types and
adhesion principles. One of the main aspects is
safety, which considers the ability of robots to
inspect dangerous constructions of human beings
Development of a Robot for Boiler Tube Inspection
535

(Schmidt and Berns, 2018). To perform the
requested tasks, climbing robots as all other
technical systems have to accomplish several
fulfilments which depend on the area of application.
However, commonly accepted requirements can be
figured applicable for practically all climbing robots
in the range of investigation and support:
a) Velocity and Mobility: The robot velocity and its
capability to move are two principal features in this
area. Based on the size of the piping construction it
might be obligatory to reach relatively high speed
even in vertical or horizontal direction. Furthermore,
it might be required to precisely manipulate and
position the system sidewards to investigate and
measure existing defects in the whole area of the
structure in 360
o
.
b) Payload: Based on the sensor type, locomotion,
as well as adhesion mechanisms, the vehicle needs
to be able to carry a payload of various weights.
c) Reliability and safety: Another significant non-
functional aspect is the robustness of the system. If
the tube-climbing robot fails during investigation
task, it would not be applicable in practice. Thus, the
reliability and safety requirements consist of robust
hardware, more advantageous controllers and
approaches to identify and take care of dangerous
situations and to rescue from them. Entirely, it might
be designated by rules to protect the robot within a
cable or wire to defeat the risk of a drop-off that
could hurt persons and destroy the system.
c) Reliability and Safety:
Another significant non-
functional aspect is the robustness of the system. If
the tube-climbing robot fails during the investigation
task, it would not be applicable in practice. Thus, the
reliability and safety requirements consist of
powerful hardware, more advantageous controllers
and approaches to identify and take care of
dangerous situations and to rescue from them.
Ultimately, it might be designated by rules to protect
the robot within a cable or wire to defeat the risk of
a drop-off that could hurt persons and destroy the
system.
d) Usability: Each of the abovementioned criteria is
significantly essential; however, this is only the
basis of the universal operability of the system. To
carry a vehicle system into operation, it has to be
more forceful, more efficient and less unsafe than
conventional methods, e.g., regarding inspection
systems. Moreover, it must be able to carry different
payloads (e.g., sensors or camera) depending on the
desired response, high mortality parts need to be
quickly replaceable, and the process must be faster
and less complicated compared to actual
technologies or methods.
By the performing task, a robot developer has to
determine which fulfilments have to be executed and
select applicable locomotion and adhesion
mechanisms.
2.3 Locomotion Types
a) Arms and Legs: The most general principle of
locomotion in the sphere of designing climbing
robots is the application of arms or legs. Based on
the specific type of task, climbing robots have been
constructed with the specified amount of limbs of
different degrees of freedom. The principal
advantage of this principle is high adaptability of a
robot to the surface structure. Every leg is designed
with adhesive components which allows an
examination of the foothold for the chosen attraction
forces. However, a significant amount of degrees of
freedom contributes to a complex mechanical
structure and control system. Also, this leads to
more considerable weight and greater torques.
Principally, the speed of these machines is
sufficiently low in consideration of other locomotion
mechanisms.
b) Wheels and Chains: For the operation on a
relatively smooth area, dozens of climbing robots
exist applying wheels or chain-driven locomotion. In
contrast to the legged systems, the adhesion and
locomotion components are decoupled in many
cases as used in different wheeled and tracked
machines. Another set of systems combine
locomotion and adhesion systems in the form of
electro adhesive or sticky tracks, tracks equipped
with suction cups or by magnetic wheels. The
significant advantage of wheeled or tracked
locomotion is the high speed, continuous movement
and the more straightforward mechanical design and
control elements. Nevertheless, these robots cannot
handle more substantial steps or obstacles, so they
are less adaptable to the surface characteristics and
are revealed to slip effects.
c) Sliding Frame: Particularly in combination with
pneumatic or magnetic adhesive systems sliding
frames are generally known. These principles
present a simple mechanical construction with two
frames which can move in a linear or rotational road
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
536

against each other. Mainly, each frame is equipped
with a group of attach points like suction cups or
magnets and keeps the robot at the wall while the
second frame is ascended and moved in the desired
direction. It allows easy control of robot movement
in combination with reliable adhesion since the
method can test its foot points before lifting the
second frame. The disadvantages of this principle
are a low speed compared to wheeled or tracked
robots, a discontinuous movement due to the stick-
move-stick-move cycle and comparably large size.
Wires and rails: Rails and wires are widely used for
robot locomotion in some fixed operation types. The
essential advantage of these motion principles is that
the system is attached and cannot fall away since the
adhesion system only has to arrange the machine at
the construction while the wires carry the weight of
the vehicle and additional payload. It allows a much
simpler robot structure, but, of course, requires
remote control and equipment limiting the robot to
this particular setup.
2.4 Adhesion Principles
Similar to the type of locomotion. Also, the adhesion
mechanism has to be determined based on the
intended goal. This part explains various adhesion
principles, which include the following methods.
a) Magnetic Adhesion: This fundamental technique
for climbing robots includes electromagnets and
permanent magnets, which are placed on the surface
or held at a specific distance. This method is very
reliable on ferromagnetic structures, and it can
produce high adhesion forces on a limited surface
area. Some examples are given in Fig.2.
Figure 2: Magnetic robots (Schmidt and Berns, 2018).
b) Pneumatic Adhesion: The second principle is
the pneumatic or negative pressure adhesion
technique, which is categorized by three distinct
types: passive suction cups, suction chambers, and
vortex or thrust systems. Pneumatic adhesion types
of robots are shown in Fig.3.
Figure 3: Pneumatic adhesion robots.
Table 1 demonstrates the evaluation procedure of the
sensors discussed. Laser sensor has the highest range
and lowest percentage of error. However, it costs
correspondingly high. Also, it cannot penetrate
layers of the boiler tube. Infrared sensor has a small
range of operation and error, but this sensor depends
on the reflection characteristics of the object.
Ultrasonic sensor has a preferable range of working
and error. However, the received signal may be
fluctuated depending on environmental conditions.
Thermosensors are installed in these sensors to
compensate for the fluctuating. Overall, by
evaluating all type of sensors, it is decided to use the
ultrasonic sensor in the research due to its ability to
work under required conditions, cost-effectiveness
and a low percentage of error.
Table 1. Evaluation of sensors.
Sensors Range(m)
Error
(%)
Limitations
Cost
($)
Ultrasonic 0.2-10 2.2 – 3.4.
Depend on
environmental
conditions
2-20
Infrared 0.1-0.8 0.5-5.3
Depend on
reflection
p
arameter of the
object
2-20
Laser 0.2< 0.50%
Cannot penetrate
layers of tube
50-150
3 DESIGNS AND MODELING
3.1 The Concept
As it was mentioned above the primary goal of the
research is to design a robot for boiler coal-fired
tube plants, which satisfies specific objectives,
namely,
a) Move vertically and circular directions
b) Crack detection
c) Decrease time of inspection
d) Improve cost-resource efficiency
Development of a Robot for Boiler Tube Inspection
537
First of all, to make robot's movement towards the
corresponding directions, the principle of inspection
is specified. Because inside inspection requires
specific conditions, such as stopping production and
specific dimension of the robot for different tube
sizes, which are expensive and time-consuming,
outside inspection method is chosen. Consequently,
to perform outside inspection, adhesion principle,
specifically duct fan-based, is the most appropriate
method. Thrust force, which is created by duct fan,
is crucially needed to move vertically up and
circular directions. Secondly, because in recent
industry inspections in tube plants are mostly
performed by professionals manually, the
development of this robot automates the
investigation procedures, which in turn leads to
significant reduction of time consumption. As it was
mentioned above, the main time-consuming element
of the manual inspection is the human factor.
Generally, reduction of productivity and existence of
errors make the human resources time-consuming
component. In contrast, fully automated robots with
a certain amount of sensors can perform inspections
at any time and conditions without disruption of
productivity. Additionally, automation of
inspections leads to decreasing and elimination of
errors. The climbing robot works with a certain
amount of sensors to inspect tubes for cracks and
defects to achieve the third goal. Selection of sensors
with appropriate performance is an essential part of
tube inspection. Ultrasonic sensors are selected
because of its working range, low percentage of
error and cost-effectiveness. Additionally, as the
robot inspects only outer diameter of a tube, a
camera can be used as an alternative solution.
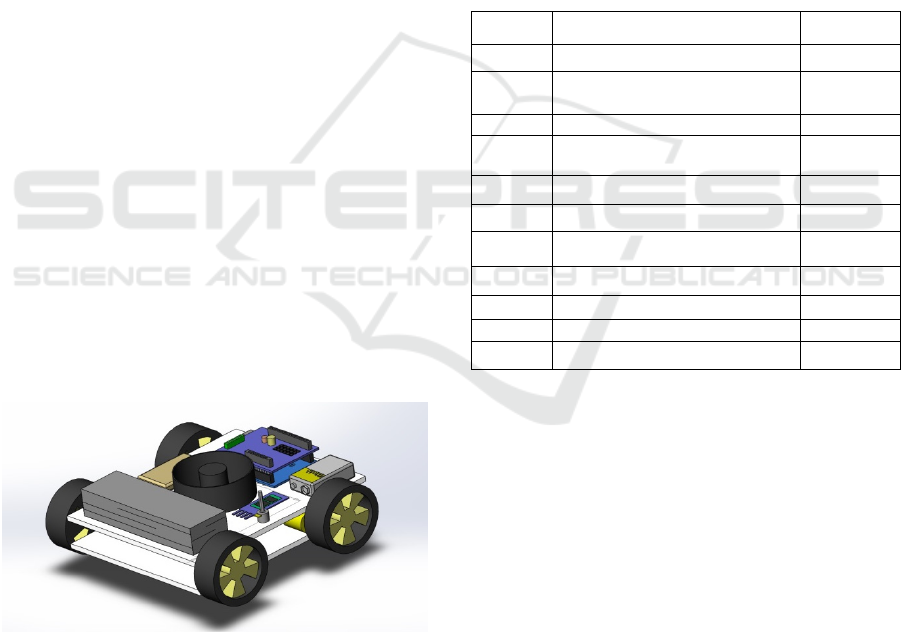
Figure 4: Final 3D Model.
Lastly, the implementation of climbing robots in
industry significantly reduces cost and improves
resource efficiency. In addition to the low cost of
components, robots do not require extra usage of
apparatus during the inspection. Furthermore, robots
can be reused for next inspections until it breaks.
However, it can be solved not by purchasing a new
robot, but replacing a broken component, because
the construction of robot is simple. Figure 4 shows
the final CAD model.
4 MATERIAL SELECTIONS
4.1 Components
The primary objective of this part of the paper is to
determine and describe the fundamental components
and their characteristics. Due to the chosen design,
electrical, mechanical and control components can
be designated. Tables 2 shows the critical
components incorporated into this research.
Table 2: Components.
Number Components Quantity
1
Arduino 1
2
Duct fan 1
3 ESC 1
4
Battery for duct fan 1
5
Battery for Arduino 1
6
Bluetooth module 1
7
Ultrasonic sensor 1
8
H-bridge 1
9
DC Motors 2
10 Wheels 4
11
Potentiometer 1
4.2 DC Motor Selection
It is needed to determine the angular speed and
required torque to select the appropriate motor to
drive the robot. Then compare results with the
technical specifications of the selected motor.
Figure 5. shows the incorporated DC motor to this
development and Eqns. (1) to (3) describe the
motor’s specification determination.
=/ (1)
=∗ (2)
=∗=∗
(3)
Where: = angular velocity; V=desired speed
(assumed 10cm/s); r=radius of wheels (3cm);
T=torque; m=mass;
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
538

=
.
0.03
=
3.3
32
= 0.6 ∗ 15.5 = 9.3
= 0.03 ∗ 9.3 = 0.2792.85 ∗
Based on equations 5 and 6, the applicable type of
DC motor with the = 32 rpm or 3.3 rad/s and T =
0.2792.85 ∗ are selected.
Figure 5: DC Motor.
5 RESULTS AND DISCUSSIONS
5.1 Prototype
At the beginning of the research, the 3D model of
the robot was created in Solidworks. Then,
according to the design, the prototype was started to
construct. However, there were significant changes
in the design to improve the performance of the
robot. Since the main objectives of the construction
were to decrease the weight of the robot, excessed
materials were removed, and lighter materials were
selected. For example, at the beginning metallic
frame (Fig. 6) with appropriate locomotion were
ordered, but due to the weight of the robot, it was
not used.
Figure 6: Metallic frame.
Another objective was to increase adhesion. For that
purpose, several types of locomotion were
considered. At the beginning of the research the
locomotion with caterpillar belt was considered, as it
has the larger contacted surface area, consequently
has greater adhesion.
Figure 7: Final prototype-side view.
Figure 8: Final prototype-top view.
However, due to the delivery problem of the
procurement other types were considered. Therefore,
the locomotion with two driver and one guide
wheels were considered to decrease the weight of
the robot. However, by decreasing the weight of the
robot, adhesion was also decreased. As a result, it
was decided to use 4 wheels, specifically two drivers
and 2 driven wheels with two-sided tape to increase
adhesion. However, after the two-sided testing tape
was removed, it glued the robot to the wall. Another
method to increase the adhesion is to decrease the
clearance between the robot and the surface of the
tube. To achieve that several objective types of the
frame were constructed. From Fig. 7 it can be seen
that air suction area was decreased, but it did not
affect. Then, it was decided to decrease the full
clearance between the frame and the surface of the
tube, as can be seen in Fig. 8. There were two
primary objectives while assembling all above-
discussed components. First of all, it is needed to
make the robot move by controlling it through
Bluetooth module. It is required to connect the
motors to accomplish this task. Bluetooth module
Development of a Robot for Boiler Tube Inspection
539

and power supply to the Arduino. The Bluetooth
module is used. Thus, writing program is not
necessary. Secondly, it is required to build the
connection to make the robot climb vertically up and
move circular direction on the tube. To achieve this
objective duct fan system is added. First of all, duct
fan is connected to an ESC, which is connected to
Arduino and power supply, simultaneously.
5.2 Testing
Testing was performed to regulate the components
and optimize the performance of the robot. For
instance, the direction of the motors was determined
during the testing. Also, required the rotational
speed of the duct fan was regulated at appropriate
power to save the power of the battery. During the
test, an electrical component was damaged and
burned. Table 3 highlights the advantages of duct
fan used to develop this robot.
Table 3: Comparing with other methods.
Robot type
Main
Advantage
Main
Disadvantage
Duct Fan
The simple
and cheap
mechanism,
easy to build
a prototype.
Needs design
modifications
to work on
pipeline
inspection
Manual
Inspection
High accuracy
Cost, more
extended time
consumption,
the human
factor
Magnetic
crawler
Can be used
on iron
surfaces which
works in the
case of this
research
Can shear off
due to
obstacles and
heavy because
of the magnets.
Suction
mechanism
The simple
mechanism
can be applied
to irregular
surfaces
Does not suit
size limitations
Flight robot Fast
Risk of
breakdown
5.3 Working Principles
Cr-Mo tubes are used in Coal-Fired Electric plants
in Kazakhstan. About 80% of electricity in
Kazakhstan is produced from coal (Kegoc, 2018).
Therefore, coal-fired plants are significant for
energy supply for the country. Chromium-
Molybdenum is a type of 41xx steel which is used in
high temperatures and pressures operating
conditions. Even if it is the most appropriate
material for boiler tubes, it has some defects after
operating for a specified period. A failure of one
tube may cause many problems in the manufacturing
process. Orr et al. (1978) present a study of
Chromium-Molybdenum steels failure modes. They
discuss various factors affecting the defects
emergence. The most important factor while
studying Cr-Mo boiler tubes is the diameter of the
tubes because it makes a significant impact on size
limitation. The catalogues show that the tube
diameter may vary from 31.8mm to about 50cm.
According to Viswanathan (2005), the main steam
pipes are about 50cm in diameter. Therefore, the
robot should not exceed this diameter and be as
small as it is possible. Apart from that, the robot can
be found useful in a lot of other inspection
processes. For instance, if there is a need to check
something under the bridge, the robot can cope with
it, as the thrust force should be able to keep it upside
down. Therefore, this type of technique can be
applied in many fields where defect detecting plays
an important role. The main limitation for the
prototype is the curvature of the surface: it is too
high, the model is not capable of holding on the
space.
6 CONCLUSIONS
This research contributes to the field of tube
inspection in petroleum industries. There were two
main challenges: i) decide on tube climbing
technology, and ii) suggest a sensor system for
defect identification. For the first challenge, duct fan
based method was selected due to its effectiveness,
cost, and simplicity. It has enough trust force to hold
itself to the surface on a vertical wall. The cost of
the prototype does not exceed $300. Concerning the
second problem, the external inspection, which is
also significant to perform, is possible to accomplish
with the presented prototype. It uses the ultrasonic
sensor to measure the distance until the surface. The
reference signal shows the distance when the
exterior part is proper, i.e., without any defect. If the
ICINCO 2018 - 15th International Conference on Informatics in Control, Automation and Robotics
540

signal differs from the reference, it can be concluded
that that the surface has a defect. Moreover, one
more proposed alternative is to use the camera and
check the structure by observing the image of it.
Another area of application is various structures that
are subjected to risk of failures such as bridges,
tunnels, tanks, ships, walls, windows and ventilation
systems. Since the robot can work with the camera,
it can check any surface with appropriate curvature
for the defects. As some areas to inspect manually
can be challenging to reach, a robot should substitute
the human in those difficult to reach zones. In
conclusion, the key objectives of this research are
achieved; the prototype with the electronic and
mechanical components is built and tested. The
preliminary results of this work provide an excellent
framework for the future advancement in this field.
REFERENCES
Advanced Pipe Inspection. (2018).Non-Destructive
Testing (NDT) - Advanced Pipe Inspection. [online]
Available at: http://www.api-uk.com/api-services/ndt
testing/ [Accessed 22 Apr. 2018].
Annalisa Milella, Rosalia Maglietta, Massimo Caccia,
Gabriele Bruzzone, (2017) "Robotic inspection of
ship hull surfaces using a magnetic crawler and a
monocular camera", Sensor Review, Vol. 37 Issue:4,
pp. 425-435, https://doi.org/10.1108/SR-02-2017-
0021
Briones, L., Bustamante, P., & Serna, M. A. (1994, May).
Wall-climbing robot for inspection in nuclear power
plants. In Robotics and Automation, 1994.
Proceedings, 1994 IEEE International Conference on
(pp. 1409-1414). IEEE.
Eich, M., & Vögele, T. (2011, June). Design and control
of a lightweight magnetic climbing robot for vessel
inspection. In Control & Automation (MED), 2011
19th Mediterranean Conference on (pp. 1200-1205).
IEEE.
Huang, H. P., Yan, J. L., & Cheng, T. H. (2010).
Development and fuzzy control of a pipe inspection
robot. IEEE Transactions on Industrial Electronics,
57(3), 1088-1095.
Kawaguchi, Y., Yoshida, I., Iwao, K. and Kikuta, T.
(1995). Development of Internal Gas Pipe Inspection
Robot. Journal of Robotics and Mechatronics, 7(5),
pp.371-376.
Kegoc (2018). Kazakhstan Electric Power Industry Key
Factors | KEGOC. [online] Available at: http://
www.kegoc.kz/en/power-industry/Kazakhstan-elec..
[Accessed 22 Apr. 2018].
Kolpack, R. (1969). Movement of Oil and Water In
Santa Barbara Channel, California. International Oil
Spill Conference Proceedings, 1969(1), 341-341.
http://dx.doi.org/10.7901/2169-3358-1969-1-341.
Orr, J., Beckitt, F. R., & Fawkes, G. D. (1978). The
physical metallurgy of chromium-molybdenum steels
for fast reactor boilers. In Ferritic steels for fast
reactor steam generators. Proceedings of an
international conference held by the British Nuclear
Energy Society at the Institution of Civil Engineers,
London 30 May-2 June 1977.
Schmidt, D. and Berns, K. (2013). Climbing robots for
maintenance and inspections of vertical structures—A
survey of design aspects and technologies. Robotics
and Autonomous Systems, 61(12), pp.1288-1305.
Vakhguelt, A., Kapayeva, S. and Bergander, M. (2017).
Combination Non-Destructive Test (NDT) Method for
Early Damage Detection and Condition Assessment of
Boiler Tubes. Procedia Engineering, 188, pp.125-132.
Viswanathan, R., Henry, J. F., Tanzosh, J., Stanko, G.,
Shingledecker, J., Vitalis, B., & Purgert, R. (2005). US
program on materials technology for ultra-supercritical
coal power plants. Journal of materials engineering
and performance, 14(3), 281-292.
Development of a Robot for Boiler Tube Inspection
541
