
Scene Understanding for Parking Space Management
Daniele Di Mauro
Department of Mathematics and Informatics, University of Catania, Catania, Italy
1 RESEARCH PROBLEM
Smart cities is one of the new frontier of the Compu-
ter Vision community. The major part of world-wide
population moved to urban areas, after such process
many issues of major cities have worsened, e.g. air
pollution, traffic, security. The increase of security
cameras and the improvements of Computer Vision
algorithm can be a good solution for many of those
problems.
Park Smart s.r.l., a company located in Catania,
believes that Computer Vision can be the answer for
parking space management. Their aim is to help pri-
vate companies and public administrations to manage
free entry parking areas, as well closed ones, in order
to offer better services to the final customer i.e. the
drivers and to increase the revenue per stall for public
administrations.
The architecture of the system follow the Edge
Computing design which brings the Computer Vision
computation close to the parking area.
The main problem the company has to face is to
find a fast way to deploy working solutions, lowering
the labeling effort to the minimum, across different
scene, cities, parking areas.
During the three years of doctoral studies we have
tried to solve the problem through the use of various
methods such as Semi-Supervised Learning, Coun-
ting and Scene Adaptation through Image Classifica-
tion, Object Detection and Semantic Segmentation.
2 OUTLINE OF OBJECTIVES
The rest of the paper is organized as follows.
This Section introduces the objectives of the work.
Section 3 presents the state of the art. Section 4 ex-
plains the formulation of our methods. Section 5 re-
ports the results. Section 6 concludes the paper.
Classification is the task where the computer vi-
sion community has obtained great results since the
introduction of deep CNNs. Thus we decided to
tackle the problem to decide if a parking space is
empty or not as a classification task over patches cor-
responding to parking lots.
Object detection is the task which deals with de-
tecting instances of semantic objects of a certain class
(i.e. pedestrians, cars, building, etc.) in digital images
and videos. We used object detection as a method for
counting cars present in a scene.
Segmentation is a partition of an image into co-
herent parts, but without any attempt at understan-
ding what these parts represent. Coherence is defi-
ned in terms of low-level cues such as color, texture
and smoothness of boundary. Semantic Segmentation
attempts to partition the image into semantically mea-
ningful parts, and to classify each part into one of the
pre-determined classes or in other word semantically
understanding the role of each pixel in the image. Se-
mantic segmentation is the starting point to have full
knowledge of a parking area.
3 STATE OF THE ART
The state of the art is divided considering different
topics: in Section 3.1 we introduce related works on
parking areas. Counting approaches are reported in
Section 3.2. Studies related to Semantic Segmenta-
tion are discussed in Section 3.3. Works about Gene-
rative Adversarial Networks and Domain Adaptation
are reported in Section 3.4 and in Section 3.5 respecti-
vely.
3.1 Parking Spaces and Computer
Vision
Wu et al. (Wu et al., 2007) proposed a simple pi-
peline to detect empty vs non-empty parking spaces.
The color distribution on rectangular patches is com-
puted and used to feed a Multi-class Support Vector
Machine (SVM) for classification purposes. The re-
sults of the classification are processed using a Mar-
kov Random Field (MRF) to refine potential conflicts
between two neighboring patches.
A method using image processing techniques was
proposed by Yusnita et al. in (Yusnita et al., 2012).
Mauro, D.
Scene Understanding for Parking Space Management.
In Doctoral Consortium (DCETE 2018), pages 3-11
3

Figure 1: This diagram shows the current Park Smart system: images and videos are captured by cameras which send them to
the AISEE embedded where the computation is performed. From there the information about the parking status is send to the
cloud in order to be viewed by users.
The authors mark the real scene painting each stall
with a circle in the center. Using morphological ope-
rators the system looks for the circles that are still vi-
sible, using an eccentricity based measure to check if
the detected blobs are roughly circular. The system
applies a threshold and counts the remaining spots,
giving in output the number of free stalls.
Lin et al. (Ng and Chua, 2012) makes use of
trajectories or events to separate empty stalls from
non-empty ones. Motion trajectories are the feature
vectors used in an adaptive Gaussian Mixture Model
(GMM) and connected component analysis for back-
ground modeling and objects tracking.
In (De Almeida et al., 2015), authors built a da-
taset in order to test and assess both old and new al-
gorithms to solve the free parking slots classification
problem. The pictures were taken in different clima-
tic conditions to provide a large variability. In order
to validate the “goodness” of the dataset, the authors
performed three kind of tests using hand-crafted fea-
tures such as Local Binary Patterns and Local Phase
Quantization.
In (Amato et al., 2017) they present a deep lear-
ning approach which make use of a modified AlexNet
CNN is employed to obtain a reduced-size model in
order to make inference possible in real-time on low-
cost embedded devices, also a new dataset (CNRPark-
EXT) has been introduced.
3.2 Counting in Computer Vision
Object counting is a challenging Computer Vision
problem that needs a fine-grained understanding of
the scene. The task has been typically studied con-
sidering specific contexts. For instance, some met-
hods tackle the problem of counting people in cro-
wded scenes (Chan et al., 2008; Chen et al., 2015;
Li et al., 2008; Lempitsky and Zisserman, 2010;
Zhang et al., 2015), cells in biological images (Lem-
pitsky and Zisserman, 2010), bacterial colonies (Fer-
rari et al., 2017), penguins (Arteta et al., 2016), etc.
According to (Loy et al., 2013), counting methods
can be divided into three groups:
• counting by detection, which uses object detection
methods and count extensively (Chen et al.,
2015);
• counting by clustering, which assumes the pre-
sence of individual entities presenting unique yet
coherent patterns which can be clustered to ap-
proximate the final number of instances (Rabaud
and Belongie, 2006);
• counting by regression, which counts entities by
learning a direct mapping from low-level imagery
to numbers (Chan et al., 2008; Lempitsky and Zis-
serman, 2010; Arteta et al., 2014; Fiaschi et al.,
2012).
DCETE 2018 - DCETE
4

3.3 Semantic Segmentation
On the semantic segmentation side, one of the net-
works, which is currently state of the art, is presented
in (Zhao et al., 2017). In their work the author exploit
global context information by different-region-based
context aggregation through a pyramid pooling mo-
dule (PSPNet). Their global prior representation is
effective to produce good quality results on the scene
parsing task, and from obtained results the work pro-
vides a superior framework for pixel-level prediction.
The proposed approach achieves state-of-the-art per-
formance on various datasets. It came first in Image-
Net scene parsing challenge 2016 (Russakovsky et al.,
2015), PASCAL VOC 2012 benchmark (Everingham
et al., 2010) and Cityscapes benchmark (Cordts et al.,
2016). A single PSPNet yields the new record of
mIoU accuracy 85.4% on PASCAL VOC 2012 and
accuracy 80.2% on Cityscapes.
3.4 Generative Adversarial Networks
In 2014 the work of Goodfellow et al. (Goodfellow
et al., 2014) introduced the Generative Adversarial
Networks. The idea behind this work is to build a
generative model using two networks, a generative
network and a discriminative one, which work one
against the other. The goal of the generative network
is to create a sample similar to elements of training
set. The goal of the discriminative network, on the ot-
her end, is to learn to recognize fake images from the
real belonging to the training set.
There are several application of GANs since 2014,
among all we can remember super resolution (Le-
dig et al., 2016), next video frame prediction (Lot-
ter et al., 2016), generative visual manipulation (Zhu
et al., 2016), image-translation (Isola et al., 2017).
3.5 Domain Adaptation for Semantic
Segmentation
Domain Adaptation for classification problems has
many years of application, but it has been less in-
vestigated in the world of Semantic Segmentation, to
the best of our knowledge the first work in this di-
rection is from Hoffman et al. (Hoffman et al., 2016).
This method consists of a global domain alignment
performed using a novel semantic segmentation net-
work with fully convolutional domain adversarial le-
arning. This initially adapted space then enables cate-
gory specific adaptation through a generalization of
constrained weak learning, with explicit transfer of
the spatial layout from the source to the target dom-
ains. In (Isola et al., 2017) authors introduce the pro-
blem of image-translation through the use of Gene-
rative Adversarial Networks. There are two defined
domains X and Y , their goal is to model a function
F : X → Y . They further devoloped the idea using un-
paired image trasformation in (Zhu et al., 2017). In
this work they translate from one domain to another
and try to reconstructs the original element enforcing
the transformation to have a cycle consistency.
The approach in (Hoffman et al., 2017) is to adapt
representations at both the pixel-level and feature-
level, through cycle-consistency without requiring
aligned pairs. The model has been applied to a vari-
ety of visual recognition and prediction settings, also
in the semantic segmentation task for road scenes
demonstrating transfer from synthetic to real world
domains.
The authors of (Sankaranarayanan et al., 2017)
use a model with 4 networks: an embedding network,
a pixel-wise classifier, a generator network which ta-
kes as input the learned embedding and reconstructs
the RGB image and finally the discriminator network
which performs two different tasks given an input: it
classifies the input as real or fake in a domain consis-
tent manner and it performs a pixel-wise labeling task
similar to the pixel-wise network. The output of the
pixel-wise classifier is a label map up-sampled to the
same size as the input of the embedding network.
4 METHODOLOGY
4.1 The System at Glance
As explained in our previous work (Di Mauro et al.,
2017), the system depicted in Figure 1 has four main
components:
Cameras. We use wide angle cameras to optimize
the number of parking spaces monitored. Our ap-
proach is not vendor locked. To have best results
the resolution needed is at least 50px per side for
each parking space.
AISEE IoT. We analyze the video stream as clo-
sest as possible to the camera. It is an embed-
ded system capable of elevated computing power,
enough to do inference using deep learning mo-
dels. Once inference is done the results are sent
to the cloud platform. The embedded operating
system has been developed with security, privacy
and resilience in mind. We can deploy several AI-
SEE IoT boxes depending on the number of ca-
meras and the dimension of the installation.
Cloud. We collect all the information from several
Scene Understanding for Parking Space Management
5

installed embedded systems through a cloud plat-
form which is scalable by design.
Presentation Layer. The system is accessible
through different kind of appliances:
• The dashboard is the business and administra-
tion front-end which allows all the operations
and to manage the installations (e.g. to add new
cameras, configure cameras, add embedded, re-
move embedded and upgrade them, etc.).
• The mobile app or browser are the ending point
for the people who are looking for a free spot
where to park.
4.2 Images
Semi-supervised Dataset. The proposed PSD da-
taset was acquired from August 2015 to November
2015 in a parking lot of the University of Catania.
The monitored parking lot is composed by 46 par-
king spaces. To cover the whole parking lot the data
have been acquired by four cameras with a resolu-
tion of 1920× 1080 extracted from motion jpeg regis-
tration. For each image the different parking spaces
have been manually labeled as free or occupied. For
experimental purpose the final set of parking spaces
is composed by 270796 crops. We extracted a sub-
set called PSD* which has 21000 non-empty parking
spaces and 21000 empty parking spaces.
Counting Dataset. The dataset has been acquired
using three Full-HD cameras looking at different par-
king spaces. The three cameras are referred to as
“Camera 1”, “Camera 2” and “Camera 3”. “Ca-
mera 1” observes 12 parking spaces (Figure 2), “Ca-
mera 2” monitors 14 parking spaces (Figure 3), and
“Camera 3” acquires images of 12 parking spaces (Fi-
gure 4). Given the different viewpoints of the came-
ras, the acquired scenes are characterized by different
scene geometries. We recorded two long videos per
camera at 1 f ps. The two videos have been acquired
in different days.
We propose two different ways of splitting data
into training and testing sets. The first split assumes
that training and testing data have been acquired using
a single camera. This gives rise to 6 different data
subsets (one for each camera), where one of the two
videos is used for training. The second data split assu-
mes that both training and test data have been acqui-
red using the three cameras.
Synthetic Images. Another dataset used to perform
experiments was created using the CARLA Urban
Driving Simulator (Dosovitskiy et al., 2017). The
simulator was developed to build dataset for autono-
mous driving situations. The systems does not permit
to place cameras in fixed positions, but with a trick,
i.e. placing a car in one of the predefined position in
the map and placing the cameras at different altitudes
and pitch, yaw and roll angles relative to the car is
possible to overcome this limitation. We created the
dataset using 3 views and 3 scenes.
4.3 Image Classification
The main idea is to divide each frame captured by
the camera in several crops, where every crop is a
square image corresponding to a parking space. This
approach considers the problem as an image-based bi-
nary classification task. For each stall, we first extract
the smallest square image patch containing it. Each
image patch is labeled as “empty” or “full” depending
on the occupancy status of the related stall. A classi-
fier is hence trained to discriminate between “empty”
and “full” stalls. At inference time, the trained clas-
sifier is used to determine the status of each stall in
order to obtain the number of non-empty parking spa-
ces.
4.4 Semi-supervised Learning
In (Lee, 2013) the author proposed a network trained
in a semi-supervised fashion through the use, at the
same time, of labeled and unlabeled data. To the unla-
beled data is assigned the label that the network com-
puted on the forward pass. The loss function is calcu-
lated on both labeled data and pseudo-labeled using
the following formula:
L =
1
n
n
∑
m=1
C
∑
i=1
L(y
m
i
, f
m
i
) + α(t)
1
˜n
˜n
∑
m=1
C
∑
i=1
L( ˜y
m
i
,
˜
f
m
i
)
(1)
where n is the number of labeled data, ˜n the number
of unlabeled data, C the classes, t is the number of
iterations, y and f are the labels and network result
for labeled data, ˜y
˜
f are pseudo-labels and network
result for unlabeled data and α(t) is defined as
α(t) =
0 if t < T
1
1 if T
1
≤ t < T
2
a
f
if T
2
≤ t
(2)
where a
f
= 3 and T
1
= 100, T
2
= 600. We adapted an
AlexNet to perform pseudo-label training.
4.5 Object Detection for Counting
This approach employs a car detector to localize all
the cars present in the image. All bounding boxes
DCETE 2018 - DCETE
6

Figure 2: Camera 1 observes 12 par-
king spaces.
Figure 3: Camera 2 observes 14 par-
king spaces.
Figure 4: Camera 3 observes 12 par-
king spaces.
(m) View B (n) View B labels (o) View B (p) View B labels (q) View C (r) View C labels
Figure 5: Pictures of the three scenes and three points of view created.
detected with a score lower than a given threshold d
1
are discarded. The Intersection Over Union (IoU) me-
asure between each stall and each retained bounding
box is hence computed, a stall is deemed to be occu-
pied if the IoU with at least one detected car is higher
than a given threshold d
2
. The method allows to count
the number of non-empty parking spaces by determi-
ning the status of each stall. This approach allows to
obtain also information about cars which are parked
on non-marked spaces. Such information can be use-
ful to allow for better management of parking areas,
e.g. detecting mis-parked cars.
4.6 Scene Adaptation
Our goal is to learn a semantic segmentation from
which we are able to reconstruct correctly images si-
milar to target, where semantic labels are not given
and source domain were semantic labels are given.
In order to do so we use 3 distinct networks trained
jointly. The loss function to minimize is the sum of a
semantic loss, an adversarial loss and a reconstruction
loss.
A network generate a semantic map from the
image and we calculate a loss over it. We use a classi-
cal cross-entropy function between the inferred label
and the ground truth. A second network try to recon-
struct the original image starting from the semantic
map inferred. We use a L
1
loss to measure the recon-
struction quality.
Finally, to force to have better reconstruction we
add an adversarial loss for the mapping function G :
Y → X which is defined from the semantic label space
Y to the image space X. The third network is a discri-
minator which use an adversarial loss.
5 EXPECTED OUTCOME
During the first year of research we built a strong
background over the domain and over the deep lear-
ning methods suitable to be used to solve the problem
using supervised classification. Through an analysis
of the domain it was easy to understand that, to build
a proper dataset for training, there are several varia-
bilities which have to be considered such as: camera
view, shapes of the parking spaces, and other classic
variabilities of standard image classification problem
such as background, light, deformation, weather.
Semi-Supervised classification was the first ap-
proach used to decrease labeling effort for fast de-
ployment as showed in Section 6.2.
During the second year we tried a different met-
Scene Understanding for Parking Space Management
7
hod which is based on counting objects, like cars and
parking spots, as solution for fast deployment, further
details can be found in Section 6.3.
Currently we are moving our attention to a full
knowledge of the scene through Semantic Segmen-
tation and the use of Generative Adversarial Net-
works in order to find a viable way to reach good
Scene Adaptation results further details can be found
in Section 6.4.
6 STAGE OF THE RESEARCH
6.1 Park Smart
In (Di Mauro et al., 2017) we introduced the Park
Smart system, an end-to-end pipeline for smart par-
king assistance and management. The infrastructure
implements the Edge Computing paradigm (someti-
mes referred as Fog Computing) through a set of IoT
devices which allows to perform the computation on
the edge of cloud. The system relies on computer vi-
sion algorithms able to classify parking spaces, given
their spatial configuration. To investigate the appro-
ach we used PKLot dataset (De Almeida et al., 2015),
it has 12417 images with resolution of 1280 × 720
pixels. We sampled three datasets, one for each par-
king area, and fine-tuned AlexNet, results are repor-
ted in Table 1. We also tested this approach using our
data, creating 3 subsets: DS1 has 17688 train images,
3924 in val and 21612 in test; DS2 has 20636 train
images, 4578 in val and 31374 in test; DS3 has 13032
train images, 2820 in val and 25212 in test, results on
this second experiment are reported in Table 2.
6.2 Learning Approaches for Parking
Lots Classification
In (Di Mauro et al., 2016) we analyzed supervised vs
semi-supervised approaches on the problem of par-
king lots classification. Results shown that the super-
vised approach using a classical AlexNet with fine-
tuning outperforms a semi-supervised method which
use pseudo-labels. Moreover the pseudo-label suffers
when the dataset to be classified is composed by sam-
ples unbalanced with respect to the classes. The expe-
riments (see Table 3 and Table 4) pointed out that the
supervised method (AlexNet plus fine-tuning) outper-
forms the semi-supervised one (Pseudo-label) in all
cases, obtaining very high accuracy (over 96% with
few images as training). Moreover good results can
be obtained with Pseudo-label only when the dataset
to be classified is balanced in terms of samples per
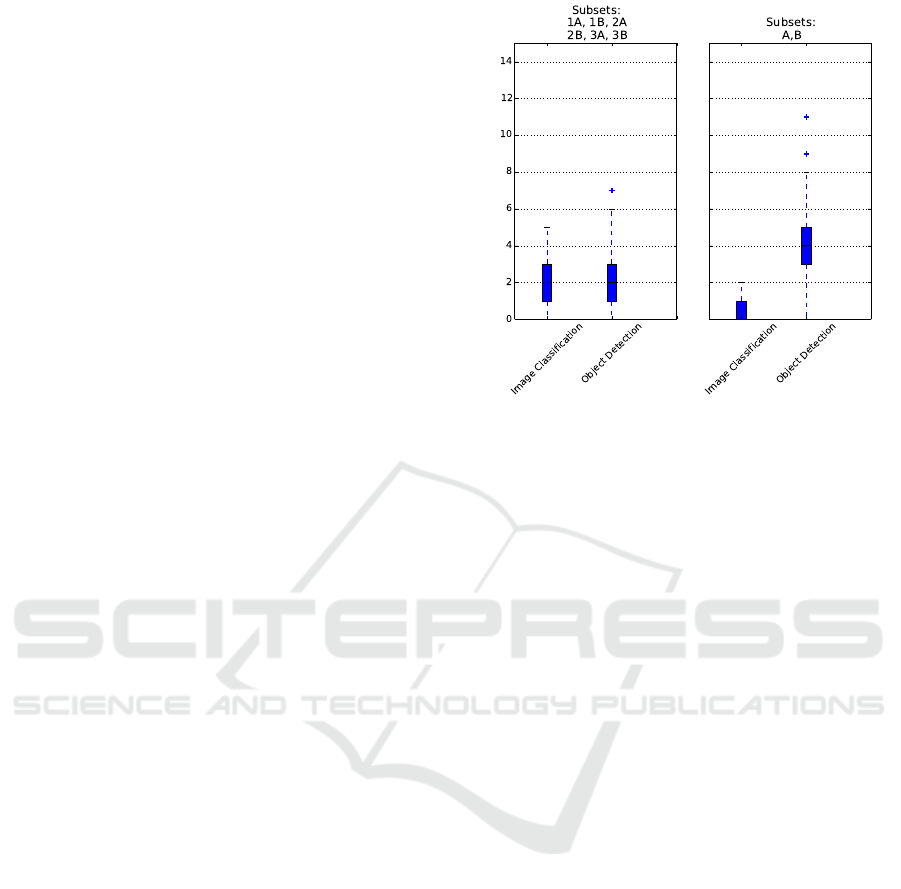
Figure 6: Box plots for counting non-empty spaces. We
plot the mean absolute error for counting non-empty spaces
in the single camera experiment and in the multiple camera.
Higher is the worst.
classes, which is a prior knowledge too difficult have
in real applications, the trade-off discourage, in this
case, to use this approach.
6.3 A Comparison of Techniques based
on Image Classification and Object
Detection to Count Cars and
Non-empty Stalls in Parking Spaces
In (Di Mauro et al., 2018) we investigated and com-
pared two different approaches to count non-empty
spaces and cars in parking areas. To perform the ana-
lysis, a dataset of videos has been collected in a real
scenario and each frame has been labeled according to
the position of parking stalls, the number of occupied
stalls, and the number of cars in the frame. Results
show that, when the geometry of the scene is known
(i.e., stalls are marked), the system can take advantage
of binary classification methods to obtain competitive
results.
In Figure 6 we reports box plots with the Abso-
lute Error values on counting non-empty spaces using
classification and object detection. Figure 6 we re-
ports box plots with the Absolute Error values values
on counting cars using classification and object de-
tection. In both figures we denote with subsets 1A,
2A, 3A, 1B, 2B, 3B a subset where training set and
test set are composed with images from one camera.
We denote with A and B subset with training set and
test set with images from all cameras.
DCETE 2018 - DCETE
8
Table 1: Results using a fine-tuned AlexNet on PKLot.
Sample Train Val Test Accuracy
UFPR05 19281 4820 24101 99.93%
UFPR04 20000 5000 25000 99,96%
PUC 20000 5000 25000 99,92%
Table 2: Results obtained considering different CNN models and three dataset created from our data.
CNN Models DS1 DS2 DS3 Avg. Accuracy Footprint
AlexNet (Krizhevsky et al., 2012) 98,80% 99.20% 93.82% 97,27% 217M
GoogLeNet (Szegedy et al., 2015) 99.72% 99.58% 99.26% 99.52% 40M
VGG16 (Simonyan and Zisserman, 2014) 99.13% 98.70% 94.91% 97.58% 528M
Table 3: Results with training balanced per camera and class, PKLot has 72000 images, PSD has 144000 images, PSD* has
42000 balanced between empty and non-empty.
Dataset Method Loss Training Size 0.17% Training Size 1% Training Size 1.7% Training Size 5%
PKLot finetuning crossentropy 97.35% ± 2.17 99.40% ± 0.04 99.54% ± 0.04 99.76% ± 0.02
pseudolabel crossentropy 94.85% ± 1.81 98.90% ± 0.13 99.35% ± 0.17 99.77% ± 0.04
finetuning softmax 97.35% ± 2.17 99.40% ± 0.04 99.54% ± 0.04 99.76% ± 0.02
pseudolabel softmax 97.03% ± 0.79 99.07% ± 0.17 99.32% ± 0.37 99.81% ± 0.06
PSD finetuning crossentropy 99.02% ± 0.14 99.46% ± 0.15 99.52% ± 0.01 99.73% ± 0.01
pseudolabel crossentropy 95.76% ± 1.60 99.25% ± 0.04 99.38% ± 0.13 99.81% ± 0.02
finetuning softmax 99.02% ± 0.14 99.46% ± 0.15 99.52% ± 0.01 99.73% ± 0.01
pseudolabel softmax 96.89% ± 0.94 99.34% ± 0.07 99.35% ± 0.13 99.81% ± 0.04
PSD* pseudolabel crossentropy 98.24% ± 0.13 99.06% ± 0.02 97.24% ± 0.56 97.86% ± 0.02
pseudolabel softmax 97.55% ± 0.56 98.82% ± 0.11 97.45% ± 0.24 97.93% ± 0.22
Table 4: Results with training balanced per class, PKLot has 72000 images, PSD has 144000 images, PSD* has 42000
balanced between empty and non-empty.
Dataset Method Loss Training Size 0.17% Training Size 1% Training Size 1.7% Training Size 5%
PKLot finetuning crossentropy 96.46% ± 0.49 98.36% ± 0.33 98.70% ± 0.01 99.02% ± 0.04
pseudolabel crossentropy 15.24% ± 0.67 17.13% ± 0.91 20.65% ± 6.00 14.65% ± 0.00
finetuning softmax 96.39% ± 0.26 98.25% ± 0.33 98.47% ± 0.08 99.00% ± 0.15
pseudolabel softmax 15.24% ± 0.67 17.13% ± 0.91 20.65% ± 6.00 14.65% ± 0.00
PSD finetuning crossentropy 96.92% ± 0.13 98.24% ± 0.05 98.59% ± 0.08 99.05% ± 0.06
pseudolabel crossentropy 15.14% ± 0.55 51.69% ± 26.55 61.78% ± 33.33 38.22% ± 33.33
finetuning softmax 96.83% ± 0.55 98.10% ± 0.39 98.68% ± 0.17 99.12% ± 0.11
pseudolabel softmax 15.14% ± 0.55 51.69% ± 26.55 61.78% ± 33.33 38.22% ± 33.33
PSD* pseudolabel crossentropy 98.50% ± 0.12 98.99% ± 0.05 97.80%± 0.21 98.19% ± 0.28
pseudolabel softmax 98.23% ± 0.29 98.99% ± 0.17 97.89% ± 0.30 98.01% ± 0.47
6.4 Scene Adaptation through
Generative Adversarial Networks
Our current attention is focused on using Generative
Adversarial Network in conjunction with a state of
the art Semantic Segmentation Network. This appro-
ach is proving to be a very promising way to perform
semantic adaptation. The classical training, on fixed
camera, tend to overfit the network in order to incre-
ase the accuracy for background pixels, while with the
GAN approach we make it easier for the network to
generalize better. We tested the trained network also
on the source domain, and in many cases, the resulting
network is better also on those. In Figure 8 we can
see initial qualitative results of our method.
ACKNOWLEDGEMENTS
I would like to thank my Ph.D. supervisor Prof. Gio-
vanni Maria Farinella (University of Catania) for his
advice, as well as Prof. Sebastiano Battiato (Univer-
sity of Catania), Dr. Antonino Furnari (University of
Catania) and Dott. Giuseppe Patan
´
e (Park Smart) for
their support and suggestions.
Scene Understanding for Parking Space Management
9
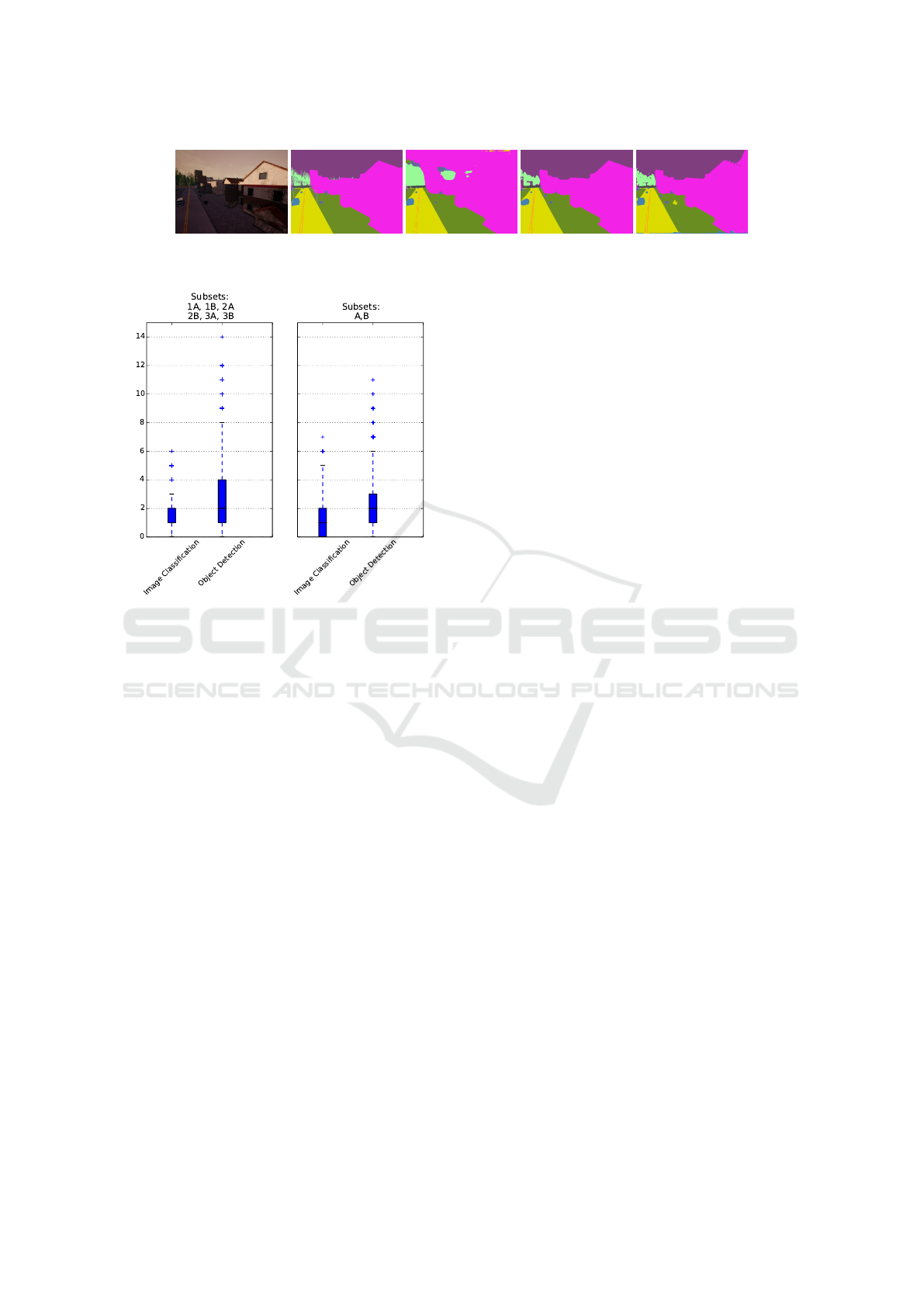
(a) Image (b) Label (c) Baseline (d) Upper (e) Our Method
Figure 8: Some results of current work with Generative Adversarial Networks.
Figure 7: Box plots for counting cars. We plot the mean
absolute error for counting cars in the single camera expe-
riment and in the multiple camera. Higher is the worst.
REFERENCES
Amato, G., Carrara, F., Falchi, F., Gennaro, C., Meghini, C.,
and Vairo, C. (2017). Deep learning for decentralized
parking lot occupancy detection. Expert Systems with
Applications, 72(15):327–334.
Arteta, C., Lempitsky, V., Noble, J. A., and Zisserman, A.
(2014). Interactive Object Counting. In European
Conference on Computer Vision, pages 1–15.
Arteta, C., Lempitsky, V., and Zisserman, A. (2016). Coun-
ting in the wild. In European Conference on Computer
Vision, pages 483–498.
Chan, A. B., Liang, Z. S.-J., and Vasconcelos, N. (2008).
Privacy preserving crowd monitoring: Counting pe-
ople without people models or tracking. In Confe-
rence on Computer Vision and Pattern Recognition,
pages 1–7. IEEE.
Chen, S., Fern, A., and Todorovic, S. (2015). Person count
localization in videos from noisy foreground and de-
tections. In Conference on Computer Vision and Pat-
tern Recognition, pages 1364–1372. IEEE.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
De Almeida, P. R., Oliveira, L. S., Britto, A. S., Silva, E. J.,
and Koerich, A. L. (2015). PKLot-A robust dataset
for parking lot classification. Expert Systems with Ap-
plications, 42(11):4937–4949.
Di Mauro, D., Battiato, S., Patan
`
e, G., Leotta, M., Maio,
D., and Farinella, G. M. (2016). Learning approaches
for parking lots classification. In International Con-
ference on Advanced Concepts for Intelligent Vision
Systems, pages 410–418. Springer.
Di Mauro, D., Furnari, A., Patan
`
e, G., Battiato, S., and Fa-
rinella, G. M. (2018). A comparison of techniques
based on image classification and object detection to
count cars and non-empty stalls in parking spaces.
In Proceedings of the 15th International Joint Con-
ference on e-Business and Telecommunications - SIG-
MAP, (ICETE 2018). INSTICC, SciTePress.
Di Mauro, D., Moltisanti, M., Patan
`
e, G., Battiato, S., and
Farinella, G. M. (2017). Park smart. In International
Workshop on Traffic and Street Surveillance for Safety
and Security. IEEE.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and Kol-
tun, V. (2017). CARLA: An open urban driving simu-
lator. In Proceedings of the 1st Annual Conference on
Robot Learning, pages 1–16.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (voc) challenge. International Journal of
Computer Vision, 88(2):303–338.
Ferrari, A., Lombardi, S., and Signoroni, A. (2017). Bacte-
rial colony counting with convolutional neural net-
works in digital microbiology imaging. Pattern Re-
cognition, 61:629–640.
Fiaschi, L., Koethe, U., Nair, R., and Hamprecht, F. A.
(2012). Learning to count with regression forest and
structured labels. In International Conference on Pat-
tern Recognition, pages 2685–2688.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In Advan-
ces in neural information processing systems, pages
2672–2680.
Hoffman, J., Tzeng, E., Park, T., Zhu, J.-Y., Isola, P., Sa-
enko, K., Efros, A. A., and Darrell, T. (2017). Cycada:
Cycle-consistent adversarial domain adaptation. arXiv
preprint arXiv:1711.03213.
Hoffman, J., Wang, D., Yu, F., and Darrell, T. (2016). Fcns
in the wild: Pixel-level adversarial and constraint-
based adaptation. arXiv preprint arXiv:1612.02649.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversa-
rial networks. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition, pages
1125–1134.
DCETE 2018 - DCETE
10

Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Advances in neural information pro-
cessing systems, pages 1097–1105.
Ledig, C., Theis, L., Husz
´
ar, F., Caballero, J., Cunning-
ham, A., Acosta, A., Aitken, A., Tejani, A., Totz, J.,
Wang, Z., et al. (2016). Photo-realistic single image
super-resolution using a generative adversarial net-
work. arXiv preprint.
Lee, D.-H. (2013). Pseudo-label: The simple and efficient
semi-supervised learning method for deep neural net-
works. In Workshop on Challenges in Representation
Learning, ICML, volume 3.
Lempitsky, V. and Zisserman, A. (2010). Learning to Count
Objects in Images. In Advances in Neural Information
Processing Systems, pages 1324–1332.
Li, M., Zhang, Z., Huang, K., and Tan, T. (2008). Estima-
ting the number of people in crowded scenes by MID
based foreground segmentation and head-shoulder de-
tection. In International Conference on Pattern Re-
cognition, pages 1–4.
Lotter, W., Kreiman, G., and Cox, D. (2016). Deep
predictive coding networks for video prediction
and unsupervised learning. arXiv preprint
arXiv:1605.08104.
Loy, C. C., Chen, K., Gong, S., and Xiang, T. (2013).
Crowd Counting and Profiling: Methodology and
Evaluation, pages 347–382. Springer, New York, NY.
Ng, L. L. and Chua, H. S. (2012). Vision-based activities
recognition by trajectory analysis for parking lot sur-
veillance. In International Conference on Circuits and
Systems, pages 137–142.
Rabaud, V. and Belongie, S. (2006). Counting Crowded
Moving Objects. In Conference on Computer Vision
and Pattern Recognition, pages 705–711. IEEE.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
Sankaranarayanan, S., Balaji, Y., Jain, A., Lim, S., and
Chellappa, R. (2017). Unsupervised domain adap-
tation for semantic segmentation with gans. CoRR,
abs/1711.06969.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S., Angue-
lov, D., Erhan, D., Vanhoucke, V., and Rabinovich, A.
(2015). Going deeper with convolutions. In Procee-
dings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 1–9.
Wu, Q., Huang, C., Wang, S.-y., Chiu, W.-c., and Chen, T.
(2007). Robust parking space detection considering
inter-space correlation. In International Conference
on Multimedia and Expo, pages 659–662. IEEE.
Yusnita, R., Norbaya, F., and Basharuddin, N. (2012). Intel-
ligent parking space detection system based on image
processing. International Journal of Innovation, Ma-
nagement and Technology, 3(3):232.
Zhang, C., Li, H., Wang, X., and Yang, X. (2015). Cross-
scene crowd counting via deep convolutional neural
networks. In Conference on Computer Vision and Pat-
tern Recognition, pages 833–841. IEEE.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017). Py-
ramid scene parsing network. In IEEE Conf. on Com-
puter Vision and Pattern Recognition (CVPR), pages
2881–2890.
Zhu, J.-Y., Kr
¨
ahenb
¨
uhl, P., Shechtman, E., and Efros, A. A.
(2016). Generative visual manipulation on the natural
image manifold. In Proceedings of European Confe-
rence on Computer Vision (ECCV).
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. arXiv preprint
arXiv:1703.10593.
Scene Understanding for Parking Space Management
11
