
Detection Accuracy of Soccer Players in Aerial Images Captured from
Several View Points
Takuro Oki
1
, Ryusuke Miyamoto
2
, Hiroyuki Yomo
3
and Shinsuke Hara
4
1
Department of Computer Science, Graduate School of Science and Technology, Japan
2
Department of Computer Science, School of Science and Technology,
Meiji University, 1-1-1 Higashimita, Tama-ku, Kawasaki-shi, Japan
3
Department of Electrical and Electronic Engineering, Faculty of Engineering Science,
Kansai University, 3-3-35 Yamate-cho, Suita-shi, Japan
4
Graduate School of Engineering,
Osaka City University, 3-3-138 Sugimoto Sumiyoshi-ku, Osaka-shi, Japan
Keywords:
Player Detection, Aerial Images, Informed-Filters.
Abstract:
To realize real-time vital sensing during exercise using wearable sensors attached to players, a novel multi-
hop routing scheme is required. To solve t his problem, image assisted routing t hat estimates the locations of
sensor nodes based on images captured from cameras on UAVs is proposed. However, it is not clear where
is the best view points for player detection i n aerial images. In this paper, the authors have investigated the
detection accuracy according to several view points using aerial images with annotations generated from the
CG-based dataset. Experimental results show that the detection accuracy became best when the view points
were slightly distant from just above the center of the field. In the best case, the detection accuracy became
very good: 0.005524 miss rate at 0.01 FPPI.
1 INTRODUCTION
A real-time vital sensing system using wearable sen-
sors with the wireless communication function atta-
ched to play ers is under development to enhance the
efficiency of training or to manage player’s condi-
tion during exercise(Hara et al., 2017). In several
kinds of sports scenes, bo th the moving speed and
the density of vital sensors attached to players may
become high; therefore, widely used RSSI-based or
GPS-based schem es for multi-hop routing cannot be
adopted to this application. To solve this problem,
Image-Assisted Routing (shortly IAR) that estimates
the locations of sensors from the locations of play-
ers wearing them based in image processing is pro-
posed(Miyamoto and Oki, 2016). To obtain image
informa tion necessary for the IAR, several cameras
mounted on UAVs or fixed tripods are used.
To achieve such localization, player’s location
must be accurately estimated in sports movies by vi-
sual object detection that is one of the most chal-
lenging task s in the field of computer vision. To
solve this task, several kinds of schemes have been
proposed(Zhang et al., 2017; Doll´ar et a l., 2012;
Liu et al. , 2016; Zhang et al., 20 15; Zhang et al.,
2014). Recently, deep convolutional networks that
showed good accuracy for the imag e classification
task has begun to show go od accuracy for also vi-
sual the object detection task. The most pop ular one
showing good accura cy for visual object detection is
R-CNN(Girshick et al., 2014), and some derivatives
from it such as Fast R-CNN and Faster R-CNN are
proposed to improve the computational speed and de-
tection accuracy. In 2017, YOLOv2 (Redmon and
Farhadi, 2017) won the best paper award at the CVPR
confere nce, which showed good accu racy in several
datasets such as COCO(Everingham et a l., 2010),
PASCAL(Everingham et al., 2010), etc. with good
processing speed.
These object detection schemes showed good
accuracy for human detection in urban scenes. Es-
pecially, detection accuracy by R-CNN can be im-
proved if appropriate training and tuning are app-
lied(Zhang et al., 2017). However, it is shown that
detection accuracy of an objec t detection constructed
with informed-filters using only color features is bet-
ter than YOLOv2 and Faster R-CNN for player de-
tection in soccer scene s(N akamura et al., 2017). The
Oki T., Miyamoto R., Yomo H. and Hara S.
Detection Accuracy of Soccer Players in Aerial Images Captured from Several View Points.
DOI: 10.5220/0006960500710076
In Proceedings of the 6th International Congress on Sport Sciences Research and Technology Support (icSPORTS 2018), pages 71-76
ISBN: 978-989-758-325-4
Copyright
c
2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
71
computation speed of the scheme based on informed-
filters can be improved by parallel processing on a
GPU(Oki and Miyamoto, 2017) without degradation
of detection accuracy; therefore, this scheme is more
suitable for embedd ed systems than schemes based on
deep learning that require huge computational r esour-
ces for real-time processing.
The accuracy of the detection scheme based on
informe d-filters using only color featu res was eva-
luated using top-down view image s generated from
a CG-based dataset where the locations of players
determined from an actual soccer scene. However,
in the previous researches(Manafifard et al., 2017;
Gerke et al., 2013), the relation between camera lo-
cations and detection accuracy was no t investigated
even though it seems important for player detection
using aerial images. To find the optimal camera loca-
tions to detect players in aerial images obtained from
UAVs this paper evaluates the detection accuracy of
players when view points are changed.
The rest of this paper is organize d as follows.
Section 2 explains the dataset used in the experi-
ment. Section 3 shows how to construct a detector
with informed-filters and datasets corresponding to
several view points. Th e heat map representing de-
tection accuracy is shown in section 4 and section 5
conclud es this paper.
2 DATASETS USED IN THE
EVALUATION
This section details a dataset u sed in our experiment.
2.1 True Locations Obtained from
Actual Motion of Players
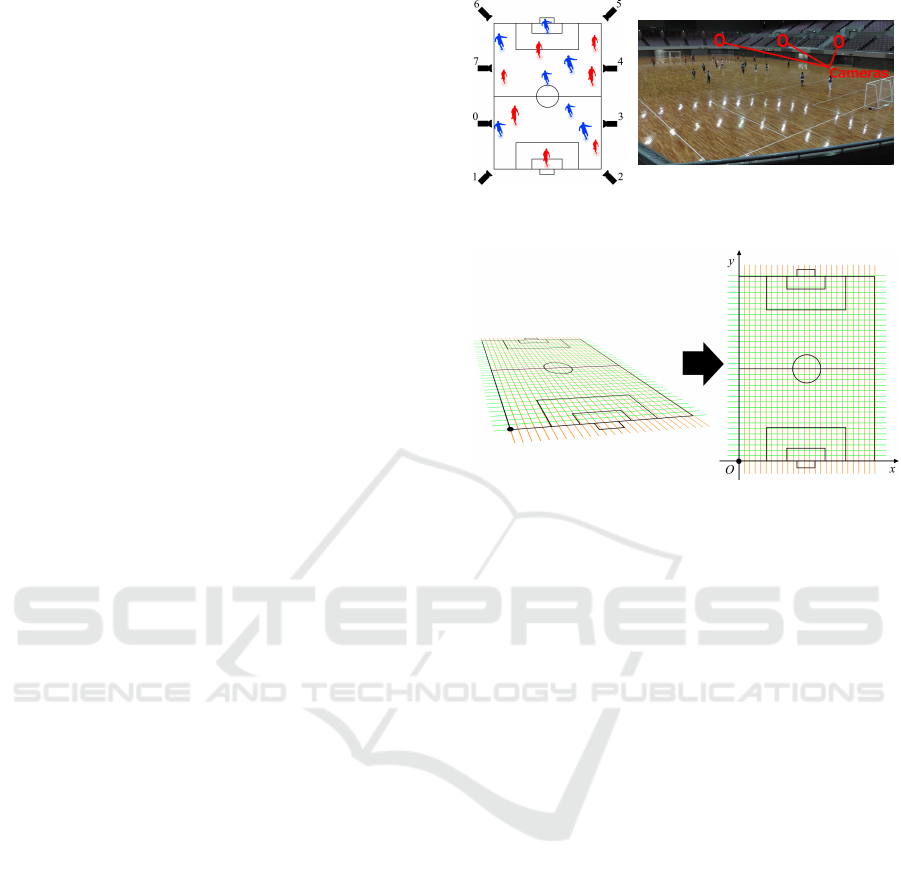
Motions of players in a dataset used in our experiment
is identical to them in the dataset created in the previ-
ous re search(Miyam oto et al., 2017). Th e dataset was
created using actual motions of players in a soccer
game that were obtained from severa l image sequen-
ces captured by cameras located as Fig.1. To deter-
mine actual locations o f players in a frame, rectang-
les that rep resents player locations in captured image
sequences were mar ked manually. After mark-up of
all players in frames included in the d ataset, a two
dimensional location in the two dimensional image
plane is determined by the center of the bottom edge
of a rectangle and then a location on the soccer field
is obtained by coordinate transform. Fig. 3 shows the
overview of the coordinate transform from an image
plane to a soccer field.
Figure 1: Camera lo-
cations.
Figure 2: An example of obtained
image.
Figure 3: The overview of the coordinate transform of ca-
mera1.
After th e creation of the ground truth about player
locations, a three dimensional virtual space represen-
ting p layer’s motions of the soccer game was crea-
ted using Unity engine, where Unity-chan, a virtual
character having a 3D model, is adopted to repre-
sent players o n the soccer field. By using the data-
set c reated on virtual dataset represented by the 3 D
CG technology, we can ea sily obtain images captured
from arbitrary v iew points for a soccer scene.
2.2 Datasets Generated from the
CG-based Dataset for Several View
Points
The purpose of this paper is evaluation of detection
accuracy according to several view points for aerial
images obta ined from a camera mounted on a UAV.
Therefore, several kinds of datasets are created from
the CG-based dataset (Miyamoto et al., 2017) chan-
ging locations and orientations of a camera in the vir-
tual space. In addition to the images, loc a tions of
players in the generated images are also generated au-
tomatically.
Fig 4 shows the view points used to generate two
dimensional images fr om the CG-based dataset. The
height of th e camera when it is located at just above
the center of the soccer field was set to 50m in the vir-
tual spac e. This location was indicated by “0”. Th e
camera locatio n moved on the four circumferences:
red, green, blue, and ora nge ones. H e re, the angle be-
icSPORTS 2018 - 6th International Congress on Sport Sciences Research and Technology Support
72
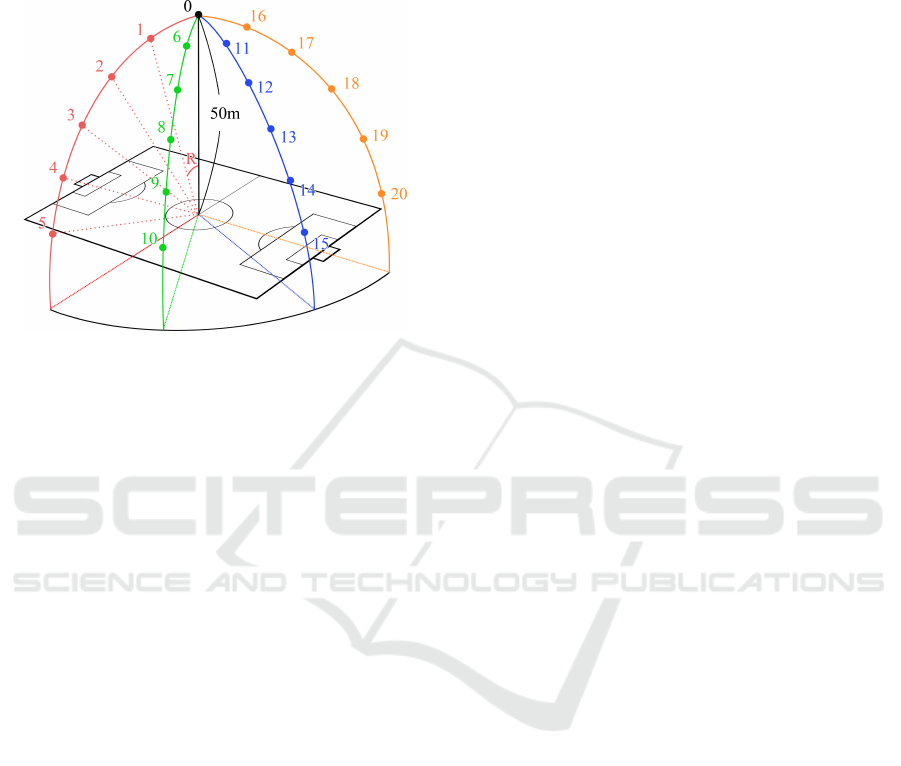
tween nearest radiuses was set to 15
◦
and the camera
orientation was set to the opposite of radial direction.
Fig. 5 shows examples of the generated images as
the datasets for the evaluation in this paper.
Figure 4: Camera locations.
3 HOW TO CONSTRUCT A
DETECTOR BASED ON
INFORMED FILTERS
This section d e ta ils how to construct a soccer player
detector using only color features with informed fil-
ters to evaluate the detection accuracy according to
several kind s of view points. The rest of this section
describes how to select training samples, how to de-
sign a template pool required for learning based o n
informe d filters, and how to construct a final strong
classifier.
3.1 Training Samples
Datasets used for the evaluation in this paper is com-
posed of two dim ensional image sequences according
to several view points generated from the CG-based
dataset as shown in the previous section. To train
a classifier used as a detec tor, positive and negative
samples must be extra cted from the images generated
from the CG-based dataset. Figs. 6 show examples
of positive training samples where players are loca -
ted in the center of cropped sub-images. On the other
hand, negative samples do not include any play ers in
croppe d sub-images as shown in Figs. 7.
At the generation process of positive samples from
image sequences using the actual location of targets
obtained from the CG-based dataset, occlusio ns so-
metimes occur when view points m oves drastically.
Such occluded samples are not included in the trai-
ning and evaluation samples because they are not suit-
able for appropriate evaluation.
3.2 Template Design for Informed
Filters
The training proc e ss of a detector by a informed filters
can be summarized as Figs. 8, and Figs. 9. Here , an
average edgemap is generated from positive train ing
samples. Then, the obtained ed gemap is divided into
rectangu la r regions called cells and labels are assig-
ned to these cells conside ring their locations. Finally
a template pool is designed using assigned labels.
It is obvious that positive train ing samples is ne-
cessary for the template design de scribed as above.
However, a good template pool may not be obtained
if inappr opriate samples are used f or edge map gene-
ration. Espe cially, the selection of positive samples
for template design becomes important because ap-
pearance of players become q uite different when v iew
points change drastically.
To avoid this problem , a template pool for infor-
med filters are generated as follows:
1. Divide all view points into five groups according
to shooting orientations.
2. Generate edge maps for each group.
3. Create template pools according to generated
edge maps.
4. Merge all template pools obtained in the previous
proced ure to generate a large tem plate pool.
This procedure tries to maintain unique characteris-
tics according to shooting or ie ntations in the genera-
tion of a template pool.
After the generation of the large template pool, a
strong classifier is constructed. I n the training pro-
cess, the Boosting algorithm selects effective weak
classifiers from the large template pool.
4 DETECTION ACCURACY
ACCORDING TO CAMERA
LOCATIONS
This section evaluates the detection accuracy for se-
veral view points and find good one for player de-
tection from a camera mounted on a UAV.
4.1 Test Images
In the evaluatio n, not to use the same target for both
training and testing on the same frame, 1800 frames
Detection Accuracy of Soccer Players in Aerial Images Captured from Several View Points
73

Figure 5: Examples of dataset.
Figure 6: P ositive samples.
Figure 7: Negative samples.
Positive Samples
Average
Edgemap
Labeled
Edgemap
Figure 8: Generate edgemap.
Figure 9: Template generation.
for each view point that were generated from the same
1800 f rames in the CG-based dataset were kept for
only testing. For the training o f the detector, other
7200 frames for each view point were used.
4.2 Detection Procedure
Detection is performed by the exhaustive search with
sliding windows that extracts huge numbers of sub-
images from an input image to determine whether an
extracted sub-image includes a detection target o r not.
In this process, scaled images are generated to find
targets whose resolution is different from the size of
detection window. Because the size o f detection tar-
gets do not change drastically in a e rial images, this
evaluation uses only three scales: ×1.0, ×1.05, and
×1.1. The size of stride to move sliding windows was
one, which me a ns all locations of an input image were
evaluated.
For th e evaluation, a detected sub-window was
accepted as true positive if Score
overlap
computed by
the following equation was greater than 0.65 :
Score
overlap
=
BB
GT
∩ BB
DET
BB
GT
, (1)
where BB
GT
and BB
DET
mean a sub-window defined
in ground truth and a detected sub-window, respecti-
vely.
4.3 Accuracy
Tables 1,2,3,4, and 5 show the evaluation results of
detection accuracy. In these table s, miss rates at some
false positive per images (FPPIs) are shown. The
“nan” in the table means that there was no false po-
sitive in the evaluation process.
These r esults show that very accurate detection
can be achieved at all view points. The best accuracy
was obtained a t cam17. The primary reason to im-
prove detection accuracy must be the visual cues in-
creases according to the incre ase of the proje cted area
of detection targets that becomes the smalls at cam00.
However, the detection accuracy become worse when
icSPORTS 2018 - 6th International Congress on Sport Sciences Research and Technology Support
74
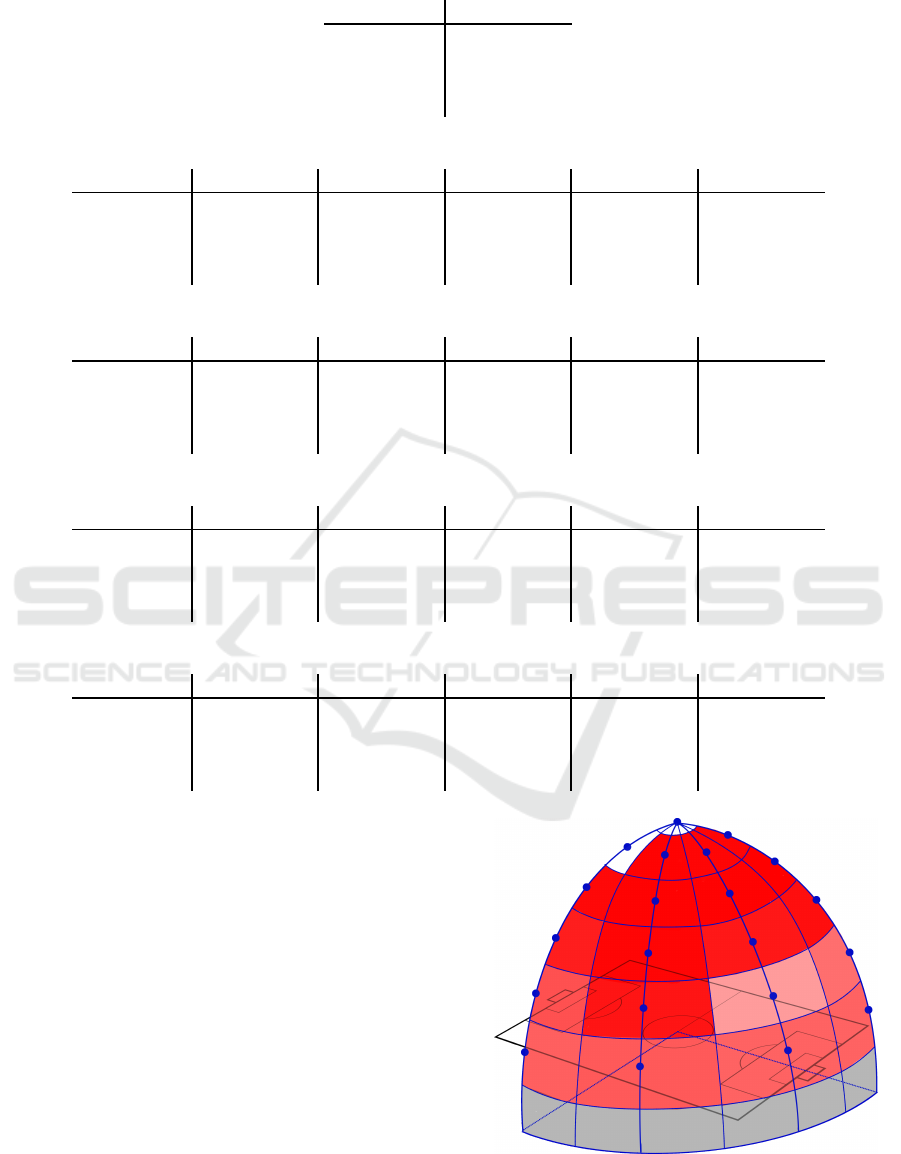
Table 1: Accuracy table, cam00.
MR@cam00
FPPI=1.0 nan
FPPI=0.1
nan
FPPI=0.01 0.006490
FPPI=0.001 0.812667
Table 2: Accuracy table, cam01-05.
MR@cam01 MR@cam02 MR@cam03 MR@cam04 MR@cam05
FPPI=1.0 nan nan nan nan nan
FPPI=0.1 nan nan nan nan nan
FPPI=0.01
0.006414 nan 0.008468 0.015025 0.031540
FPPI=0.001 0.558980 0.007738 0.014591 0.033021 0.037637
Table 3: Accuracy table, cam06-10.
MR@cam06 MR@cam07 MR@cam08 MR@cam09 MR@cam10
FPPI=1.0 nan 0.005433 nan nan nan
FPPI=0.1 nan 0.005479 nan nan 0.021780
FPPI=0.01
nan 0.005484 0.006148 0.009432 0.027652
FPPI=0.001 0.005678 0.005683 0.007467 0.012366 0.036157
Table 4: Accuracy table, cam11-15.
MR@cam11 MR@cam12 MR@cam13 MR@cam14 MR@cam15
FPPI=1.0 nan nan nan nan nan
FPPI=0.1 nan nan nan 0.006938 0.017012
FPPI=0.01
0.006399 0.005524 0.006243 0.012166 0.024646
FPPI=0.001 0.007465 0.006269 0.012894 0.059582 0.039167
Table 5: Accuracy table, cam16-20.
MR@cam16 MR@cam17 MR@cam18 MR@cam19 MR@cam20
FPPI=1.0 nan nan nan 0.006879 nan
FPPI=0.1 nan nan nan 0.006982 0.015134
FPPI=0.01
nan nan 0.005956 0.008233 0.020135
FPPI=0.001 0.006808 0.005627 0.009709 0.043803 0.039258
the height of view points be too lower be c ause heavy
occlusions may be caused at su ch view points.
4.4 Heat Map
Fig. 10 shows the heat map that represents the de-
tection accuracy at all view points defined in Fig. 4. In
this figure, the deep red color means lower m iss rate
(higher accuracy) and the miss rate becomes greater if
the red components becomes lower. Regions colored
with gray are not used in the evaluation because de-
tection accuracy becomes worse if the height of view
points becomes too low due to occlusion caused by
other targets. Some regions near the top is white; the
detection accuracy is quite bad in these regions.
Figure 10: Heatmap.
Detection Accuracy of Soccer Players in Aerial Images Captured from Several View Points
75

5 CONCLUSION
This p a per evaluated the dete c tion accura cy of play-
ers for many view points to find the best UAV locati-
ons to capture aerial images. For th e evaluation, se-
veral kinds of two dimensional images with annotati-
ons ab out player locations were generated from the
CG-based dataset ab out a soccer game considering
orientations and locations of a camera mounted on a
UAV. To tra in a strong classifier, a large template pool
was created from several tem plate pools on e of which
was generated from some view points whose shooting
orientation was the same. Experimental results using
the generated two d imensional images show that the
detection accuracy become best when a camera is lo-
cated at a view point slightly distant from just above
the center of the field.
ACKNOWLEDGEMENTS
The r esearch results have been par tly achieved by
Research and development of Innovative Network
Technologies to Create the Future, the Commissio-
ned Research of National Institute of Information and
Communica tions Technology (NICT), JAPAN.
REFERENCES
Doll´ar, P., Wojek, C., Schiele, B., and Perona, P. (2012).
Pedestrian detection: An evaluation of the state of
the art. IEEE Trans. Pattern Anal. Mach. Intell.,
34(4):743–761.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2010). The pascal visual ob-
ject classes (voc) challenge. International Journal of
Computer Vision, 88(2):303–338.
Gerke, S., Singh, S., Linnemann, A., and Ndjiki-Nya, P.
(2013). Unsupervised color classifier training for
soccer player detection. In Visual Communications
and Image Processing, pages 1–5.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. Proc. IEEE Conf. Com-
put. Vis. Pattern Recognit., pages 580–587.
Hara, S. , Yomo, H., Miyamoto, R., Kawamoto, Y., Okuhata,
H., Kawabata, T., and Nakamura, H. (2017). Challen-
ges in Real-Time Vital Signs Monitoring for Persons
during Exercises. International Journal of Wireless
Information Networks, 24:91–108.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S. E .,
Fu, C., and Berg, A. C. (2016). SSD: Single shot
multibox detector. In Proc. European Conference on
Computer Vision, pages 21–37.
Redmon, J. and Farhadi, A. (2017). YOLO9000: better, fas-
ter, stronger. In Proc. IEEE Conf. Comput. Vis. Pattern
Recognit., pages 65176525.
Manafifard, M., Ebadi, H., and Moghaddam, H. A. (2017).
A survey on player tracking i n soccer videos. Compu-
ter Vision and Image Understanding, 159:19–46.
Miyamoto, R. and Oki, T. (2016). Soccer Player Detection
with Only Color Features Selected Using Informed
Haar-like Features. In Advanced Concepts for Intel-
ligent Vision Systems, volume 10016 of Lecture Notes
in Computer Science, pages 238–249.
Miyamoto, R., Yokokawa, H., Oki, T., Yomo, H., and Hara,
S. (2017). Human detection in top-view images using
only color features. The Journal of the Institute of
Image Electronics Engineers of Japan(in Japanese),
46(4):559–567.
Nakamura, Y., Nakamura, T., Oki, T., and Miyamoto, R.
(2017). Comparison of various approaches for object
detection. In Fall Meeting of Federation of Imaging
Societies, pages 94–98.
Oki, T. and Miyamoto, R. (2017). Efficient GPU imple-
mentation of informed-filters for fast computation. In
Image and Video Technology, pages 302–313.
Zhang, S. , Bauckhage, C., and Cremers, A. (2014). Infor-
med haar-like features improve pedestrian detection.
In Proc. IEEE Conf. Comput. Vis. Pattern Recognit.,
pages 947–954.
Zhang, S. , Benenson, R., and Schiele, B. (2015). Fil-
tered channel features for pedestrian detection. In
Proc. IEEE Conf. Comput. Vis. Pattern Recognit., pa-
ges 1751–1760.
Zhang, S. , Benenson, R., and Schiele, B. (2017). Cityper-
sons: A diverse dataset for pedestrian detection. In
Proc. IEEE Conf. Comput. Vis. Pattern Recognit., pa-
ges 4457–4465.
icSPORTS 2018 - 6th International Congress on Sport Sciences Research and Technology Support
76
