
An Evaluation of Swarm Robotic Cooperative Target Search
Shijie Lu and Yingguang Hao
School of Information and Communication Engineering, Dalian University of Technology, Dalian, MyTown, China
lushijie@mail.dlut.edu.cn
Keywords: Swarm Robotics, Particle swarm optimization, Auxiliary orientation, Roaming algorithm.
Abstract: To search for multiple targets with swarm robots, those robots should be divided into some sub-swarm by job
allocation, so that each sub-swarm can cooperatively work focusing on its desired target. Each sub-swarm
searches for its target by evolutionary algorithm. In order to improve the cooperative search ability of sub-
swarm, a new particle swarm algorithm based on auxiliary orientation improvement is proposed to enhance
the efficiency and accuracy of the search. In the simulation, the general roaming algorithm consumes a longer
time to find the target, and reduces the overall efficiency of the system. In order to solve this problem, a spiral
roaming method based on artificial potential field is introduced to improve the global search capability. The
simulation results show that the search efficiency is improved significantly by using this method.
1 INTRODUCTION
Swarm robotic (SR) research is inspired by the group
behaviors of bees, birds and other groups. A single
robot is thought to be unintelligent, but it can achieve
the desired goal through group behaviors and
demonstrate intelligence. The concept of swarm
robotics was first proposed by G. Beni et.al. Swarm
intelligence studies are devoted to simulating swarm
intelligence of natural organisms, which is to enable
individuals with simple perception to emerge swarm
intelligence through local communication. The
characteristics of swarm robotics: (1) the robot has
independent perception and communication ability.
(2) the robot has simple ability and low cost. (3) the
robot is independent of each other, and the structure
is distributed. (4) the self-organization ability based
on local communication (Şahin, E. 2004; Balch, T.
2004; Xue, S.,2008; Zeng, 2010; Zhuang, 2013)
Target search is one of the benchmark problems
in swarm robotics. Robots can perform tasks that
humans can't accomplish or are extremely dangerous
at low cost and price with the application of swarm
intelligence. For example, exploration, mine
sweeping, battlefield search, search and rescue in
hazardous areas, etc. In view of the fact that particle
swarm optimization uses individual effective
information and local communication to influence the
neighborhood individuals moving toward local
optimum, Doctor. s et.al. (2004) introduce Particle
Swarm Optimization (PSO) algorithm into multi
robot search system. Aiming at the characteristics of
dynamic neighborhood and limited communication
range in multi robot search, Pugh et.al. (2006)
improved the problem model and formed a classical
swarm robotic target search model. Anh-Quy H et.al.
(Zhang, 2014) analyzed and compared the effects of
two improved particle swarm algorithms in the
exploration of unknown environments. The paper
mainly improved the missing and collision problems.
Based on the model of swarm robotic search problem
proposed by Doctor. S et.al. (2004) and Pugh et.al.
(2006), Zhang et.al. (2014) proposed a model that
robots search targets cooperatively in the unknown
environment. In this model, the distributed robot has
a single perception ability, and has the ability of self-
localization and local information interaction. This
model fits the characteristics of swarm intelligence
and is representative. However, the search efficiency
of swarm robotics in the random search stage is not
achieved, especially when the target location is
remote, which slows down the overall search process.
The improved particle swarm optimization with
artificial potential field has achieved good results in
solving the problem of loss and collision (Hoang,
2016). In order to solve the problem that the
exploration range is too concentrated and the remote
area is easy to miss when the robot performs the
unknown environment exploration task. In this paper,
the artificial potential field improved spiral search
method is used to drive other roaming robots to other
unexplored regions. Through this improvement, the
476
Lu, S. and Hao, Y.
An Evaluation of Swarm Robotic Cooperative Target Search.
In 3rd International Conference on Electromechanical Control Technology and Transportation (ICECTT 2018), pages 476-486
ISBN: 978-989-758-312-4
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

target in the unknown position can get the attention of
the search robot earlier. Thus, the robot can detect
unknown targets as soon as possible. Simulation
results show that the search time of roaming stage is
reduced.
The cooperative search of swarm robotics can be
divided into three steps. The first step is roaming
search. The second step is to obtain local search
information through neighborhood communication,
and then determine their respective targets to search.
The third step is that robots with the same goal form
search alliances, and then search their targets
precisely by particle swarm optimization. The
traditional particle swarm optimization algorithm
guides the robots to the position of the local optimal
positions and their optimal positions. Inspired by
localization technology, directional technology is
introduced into particle swarm optimization. The
directional results are used to guide the robots to
approach the most likely positions of the targets.
Based on the proposed roaming strategy, a particle
swarm optimization algorithm based on auxiliary
orientation technology is proposed. Simulation
results show that the algorithm improves the
efficiency of swarm robotic search.
2 PROBLEM DESCRIPTION
2.1 Description of environment and
system
The robot starts from a random location of the search
environment to search for the task target in the
environment space. It is assumed that the robot can
locate itself (Pugh, 2006) in a certain positioning
mechanism and obtain its own position relative to the
environment. Only based on these can the robot
acquire and update its best position and share the best
position with other robots in the neighborhood. Then,
the local optimal location in neighborhood is obtained
by comparison. Finally, the particle swarm algorithm
is used to approach and locate the target.
Four tuple <R, E, T, S> can be used to describe
the multi objective search problem of swarm robots
(Kennedy, 2002):
a. Search agents (R): R=<U, B, C>;
R refers to a single robot. U is a collection of
objects directly detected by the robot and indirectly
obtained by interacting with the robots in the
neighborhood. B is the autonomous decision-making
behavior of the robot, that is, according to its own
perception of the environment and information
indirectly obtained, the robot autonomously
determines its own search mode; C represents the
cooperation of robots on the basis of neighborhood
communication;
b. Targets (T): T = {
i
T , i = 1 ... M}, m > 1;
T are the targets of swarm robots, that is, the task
set to be searched. Each target has its own signal
frequency, which is used to distinguish different
targets. M is the number of targets in a task.
c. Swarm robot (S): S = {
j
R
, j=1 ... n} n> >m;
S is a collection of all robots participating in the
search task. N is the total number of robots.
d. search environment (E): two-dimensional space
in closed space
2.2 Robot
N autonomous robots, as search subjects, constitute
swarm robots, which are robots with limited detection
distance, positioning accuracy, communication range
and so on (Zhang, 2015). The detector configured by
the robot can detect the signal emitted by the target
and obtain the intensity information. However, the
detection radius of the robot detector is relatively
small compared with the environmental dimension.
Based on the detected target intensity information
and neighborhood information, each robot switches
between three working modes: roaming mode,
particle swarm search mode, and capturing target
mode (Liu, 2010). When the robot does not obtain the
target information directly or indirectly, the roaming
mode is adopted. When the robot senses the target
directly or indirectly, and decides to take part in the
local search, the particle swarm search model is
adopted. Moreover, the robot continuously exchanges
the latest position and intensity information with
other robots in the communication neighborhood.
When the signal intensity directly detected by the
robot reaches the standard, the robot enters the
capturing target mode and announces the target to be
searched through neighborhood communication.
Then the robot continues to participate in the search
for the remaining target until all the targets are
searched.
2.3 Communication neighborhood and
distributed control
In the standard particle swarm optimization
algorithm, the neighborhood of the particle is the
whole search space. The particle can exchange
information with particles at any position in the
search space. In the swarm robotic system,
considering the communication distance and ability
An Evaluation of Swarm Robotic Cooperative Target Search
477

of a single robot is bound to be limited, the
communication distance must be greater than the
detection distance, but it should be smaller than the
environmental size. Otherwise, the robot will have
global communication capability. In our model, the
neighborhood of each robot is defined as the region
within its maximum communication distance. The
neighborhood is dynamic with time, because the
robot is moving continuously (Pugh, 2007). The robot
exchanges its own position and detected signal
intensity with other robots in the neighborhood.
Distributed control requires less communication
distance and capability, and does not require a robot
with central processor function. Full distributed
control is an important feature of swarm robotics.
2.4 Signal intensity
In particle swarm optimization, the local optimum
positions and the optimal locations of individuals are
determined by the intensity of the perceived signals.
Suppose each robot is equipped with a signal detector,
which can detect the intensity of different frequency
signals emitted by different targets. Xue et.al. (2008)
made a detailed analysis of the signal. The signal
intensity model of this paper is Eq.1 (Pugh, 2007):
2
/()
ii
IPd
(1)
P is the power of the signal source. d is the
Euclidean distance between the robot and the signal
source.
is a random disturbance. Assuming that the
detection threshold is
m
I
, then
max
()
m
IIR
. If the
distance between the robot and the target exceeds the
maximum detection radius of
max
R , the target signal
cannot be detected.
2.5 Collision problem and speed limit
Particles are assumed to be infinitely small in particle
swarm algorithms, so they cannot conflict with each
other. But in the robot cooperative search system,
both the robot and the target have their own geometric
dimensions, so the collision problem needs to be
considered. Pugh et.al. (2007) adopts the Braitenberg
obstacle avoidance method, which is that the robot
will continue to select the previous motion speed after
changing direction. The obstacle avoidance method
proposed by Liu et.al. (2012) requires the current
state of motion of each robot and the speed at the next
moment. It is difficult to apply for robot with limited
detection ability and accuracy. Anh et.al. applies the
artificial potential field method to particle swarm
optimization to solve the problems of disconnection
and collision in multi-robot target search (Hoang,
2016). This paper uses the same method to solve the
obstacle avoidance problem in particle swarm
optimization.
The particles in the basic particle swarm
optimization algorithm have no acceleration and
speed constraints, but the speed of the robot is limited
in reality. If the speed of the robot obtained by particle
swarm algorithm exceeds the maximum, the speed
will be set to the maximum value. Only in this way
can the collision problem be handled at each step and
the robot can avoid crossing each other. Furthermore,
in order to make each step of the robot not seem to be
done in a flash. The moving distance of the robot in
each loop is divided into several segments to make its
moving trajectory smoother.
2.6 Division of tasks
One of the most commonly used methods of task
assignment is market based strategy (Dias, 2006). It
is not suitable to adopt the market based strategy in
swarm robotic system. The decomposition of the
tasks is accomplished by the robots autonomously in
the framework of swarm robotic system (Liu, L.,
2012). The global division of tasks is completed after
each robot decides its own goal. Therefore, the most
commonly used method of division in swarm robot
system is the method based on threshold (Zhang,
2014). This paper adopts the method based on
threshold to divide the tasks.
2.7 Adjustment of division
The target detected first will take the attention of
much more robots. It is possible all the robots that
have detected the target will take the target as their
goals, if we do not introduce the adjustment of task
selection. Which will cause local crowding and waste
the resources of system. Furthermore, it will reduce
the efficiency of global search.
Based on the intensities of the objective signal
detected by the robots. We rank the robots those
choose to search the same target. Zhang et.al. (2014)
point out that the ideal search efficiency can be
achieved by setting the maximum number of robots
to six in an alliance. The alliance is composed of the
robots with the same target to search. Only the top six
robots can join in the alliance, while there are more
than six robots choose the same target. The other
robots should convert to roaming mode. On the other
hand, while there are less than six robots choose the
same target, all these robots can join in the alliance.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
478
Furthermore, we adopt the mechanisms of exit and
punishment (Zhang, 2014).
3 APE IMPROVED SPIRAL
ROAMING STRATEGY
3.1 APE
Proposed by Khatib.O in 1986 for single robot path
planning (Kennedy, 2002), APF is now widely used
in works on multi-robot system. APF generates
around each robot a virtual potential field containing
a repulsive field and an attractive field. The attractive
field directs each robot towards other robots in the
system while the repulsive field keeps them far away
from other robots or obstacles. The magnitude of
potential forces exerted on each robot are
continuously updated based on the information it gets
from the immediate surrounding environment, or
from other robots via connection network (Hoang,
2016).
3.2 Spiral roaming strategy
The size of the space to be explored is much larger
than the maximum detection distance of the detector
configured by the robot. When the search begins, the
robot first enters the random wandering state to find
the target signal (Xue, 2009). In order to cover as
much space as possible in the shortest time, we can
adopt the spiral roaming strategy mentioned by AT
Hayes (2002), and the explosion dispersing roaming
strategy proposed by Meng et.al. (2008). In view of
the fact that the explosive dispersion roaming strategy
may be too dispersed in the long distance, and then
the blind zone appears, the spiral roaming strategy is
adopted in this paper. The spiral can be realized by
Eq.2.
cos( / 4 )
sin( / 4 )
x
vt wt
yvt wt
(2)
Where, x and y are the coordinates of the points
on the spiral, t is the time variable, v is the linear
velocity, w is angular velocity,
/4
is the initial
angle. The divergence of the spiral can be controlled
by controlling those parameters.
3.3 APE-Spiral Roam
In the simulation of (Liu, 2010; Xue, 2009) or in this
paper, in the original spiral roaming state, the robot
search paths are close to each other, and do not play
the proper efficiency of multiple robots. The
efficiency of swarm robotic search has been greatly
affected. At this point, the machines appear to be
unintelligent, and on the contrary, when people
cooperate to find the target, they will inform the
people within the scope of communication "there is
no target here.
It is not a new idea to applying APF to multi-robot
system. However, in previous works, they are only
used for formation control and path planning (Hoang,
2016; Pugh, 2006; Liu, 2012). Furthermore, Anh-Quy
H et.al. (2016) use APE for the task of space
exploration. To solve the problem mentioned above,
we use artificial potential field to simulate human
communication, that is to tell the surrounding robot,
search elsewhere. Thus, the original spiral roaming
strategy is improved.
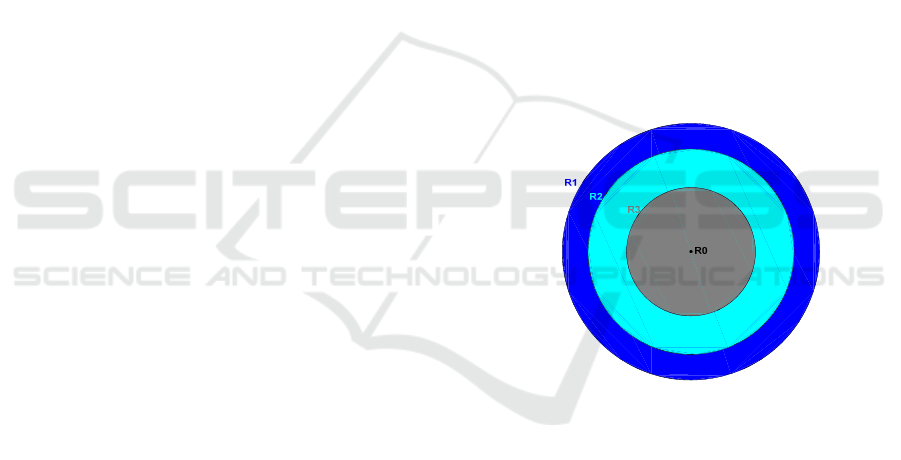
Figure 1: Potential field.
The potential field of each robot is shown in Fig.1,
with the center of the position of each robot as the
center of the circle, and three circular regions with
radius of
1
R ,
2
R and
3
R are established
respectively.
In the figure,
0
R is the center of the robot.
1
R is
the radius of attractive field. The robots are attracted
by the robot at
0
R when they are between
1
R and
2
R
. Between
2
R and
3
R , the robots are not affected by
the robots at
0
R in this area.
3
R is the radius of the
repulsive field, and the robots are repulsed by the
robot at
0
R when they are in the repulsive field.
Under the combined action of attractive field and
An Evaluation of Swarm Robotic Cooperative Target Search
479

repulsive field. It avoids the gaps between the robots
become the blind area of the detection, and also
prevents the robot from penetrating into the detection
area of other robots. After introducing the concept
mentioned above. We let the roaming robot adopt the
spiral roaming strategy. This is called the Ape-Spiral
Roam method. To illustrate this method, the
following Eq.3 is introduced:
12
12 12 12 1 12 2
3
12
12 3
[u(r ) u(r r ) ku(r r )
ku(r r )] 3
APE
Gm m
F
r
12
r
(
)
1, 0
()
0, 0
t
ut
t
(4)
G is the gravitational constant in the formula, and
k is the adjustment factor.
1
m and
2
m represent the
reliability values of robots.
12
R is the distance vector
from robot 1 to robot 2.
12
F
is the force of robot 1
acting on robot 2. The combinative force of other
robots under robot j is calculated by Eq.5:
1
APEj AP
N
i
E
ij
FF
(5)
The combinative force gives an additional
acceleration component to each robot. The velocity of
each robot is calculated by Eq.6:
1= +
i i APEi
vt vt v t
(6)
4 AO IMPROVED PSO
4.1 Premature convergence of PSO
PSO algorithm shows good performance in multi-
target search. But in the traditional particle swarm
algorithm, in the later stage of the search process,
after several cycles, the particles are likely to follow
the local optimal particles to fly. Thus, the ability of
individual exploration decreases and premature
convergence occurs.
Similarly, the location of the local optimal robot
is not the location of the target in multi-target search
system. Premature convergence is also easy to
happen. It is better to direct robots to the potential
target position than to direct robots to the optimal
position in the neighborhood.
4.2 Auxiliary orientation technology
Inspired by localization technology, directional
technology is introduced into particle swarm
optimization. Before the premature convergence
occurs, the position of the target is estimated by using
the robot which satisfies the distance between each
other by local communication. The estimated position
is introduced into particle swarm optimization to
improve the searching ability of PSO.
The signal intensity perceived by the optimal
robot is directly related to the distance between the
robot and the signal source. The signal intensity can
be used to estimate the distance between the signal
source and the local optimal robot by Eq.7. Where i
is the number of the robot. It can be inferred that the
signal source is in a circular orbit around the local
optimum robot, whose radius is the estimated
distance.
d| /I|
ii
P (7)
If there is another robot directly detects the same
source. We can find the distance between the second
robot and the signal source in the same way. The
signal source is also in a circular orbit around the
robot, whose radius is the estimated distance.
Suppose the coordinates of two robots are
1, 1
()
x
y
and
2, 2
()
x
y
. Then two intersection points can be obtained
by solving the system of Eq.8 formed by two circles.
222
111
222
222
()()
()( )
x
xyyd
x
xyyd
(8)
Suppose the coordinates of two intersection points
are
1, 1
()
s
z
and
2, 2
()
s
z
. The coordinates of the third
robot are
3, 3
()
x
y
. And
3
d is the distance between the
third robot and the signal source. Find the distances
between third robot relative to the two intersections
by Eq.9.
22
33 3
()()
ii i
dxsyz
(9)
As the follow Eq.10. If the two distances are not
equal. The distance which is closer to
3
d is used to
inferred the position of the signal source. And h is the
adjustable constant to avoid the mistake choice. In
this paper we select h=10.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
480

33 3 3
,
33 33
(, ),| | | |
(, ),| | | |
ii i j
sz
jj j i
s
zddhdd
x
s
zddhdd
(10)
Where
,
s
z
x
is the estimation position of the signal
source. Which is introduced into particle swarm
optimization by Eq.11.
'
'
**
,,, , ,,
,
,
**
,,, ,
,
( ) () ( - ) ( - )( - ) ( - ) ( - ) 3
(1)
( ) () ( - ) () ( - )
ij p ij ij n fs ij n fs sz ij d
ij
ij
ij p ij ij n ij
ij
w v t w rand x x w u L d x x w d L x x N
vt
w v t w rand x x w rand x x
3
d
N
(11)
1, 0
()
0, 0
t
t
t
(12)
Where
f
s
d
is the distance from the first robot to
the second robot that detect the same target. L is the
adjustable factor to avoid the second robot being too
close to the first robot. In this paper we select L=20.
N
d
represent the number of robots that detect the
same target directly.
(t)
is the unit step function,
,ij
x
is the best position of the individual robot,
'
,ij
x
is the best position of the sub-swarm robots. w is the
weight of inertia,
p
w
is the weight of the best
position of the individual,
n
w is the weight of local
best position.
,,,
(1) () ()
ij ij ij
x
txtvt
(13)
The position of every robots is calculated by
Eq.13. This algorithm is called auxiliary orientation
technology improved Particle swarm optimization
algorithm (AO-PSO).
4.3 Extension of Directional technology
In the early stage of particle swarm algorithm, there
is only one robot that detects the target directly.
Inspired by the characteristics of directional Yagi
antenna. The position information and the target
intensity information of the robot which uniquely
detects the target are stored. The early position of the
target is estimated by the position information and
intensity information of a single robot in the scattered
position. Using the estimated location information to
direct other robots to detect the target as early as
possible.
5 SIMULATION AND RESULTS
In order to evaluate the effectiveness of the algorithm,
visual simulation was performed under Matlab. Two
groups of experiments were carried out under two
conditions. According to the different experimental
purposes, various parameters were changed and
repeated experiments were carried out. The
experimental results are analyzed and compared with
the existing methods, and the statistical results are
obtained.
5.1 Parameters and conditions
The main parameters of the simulation include
subject, object, environment, etc. The parameters are
shown in Table 1.
The initial position of each robot is randomly
generated in the range of 20 to 120 from the starting
point. The initial velocity of the robot is randomly
generated between 1 and 5, and the direction is
random. The target is generated at a random location
at a certain distance from the starting point.
An Evaluation of Swarm Robotic Cooperative Target Search
481
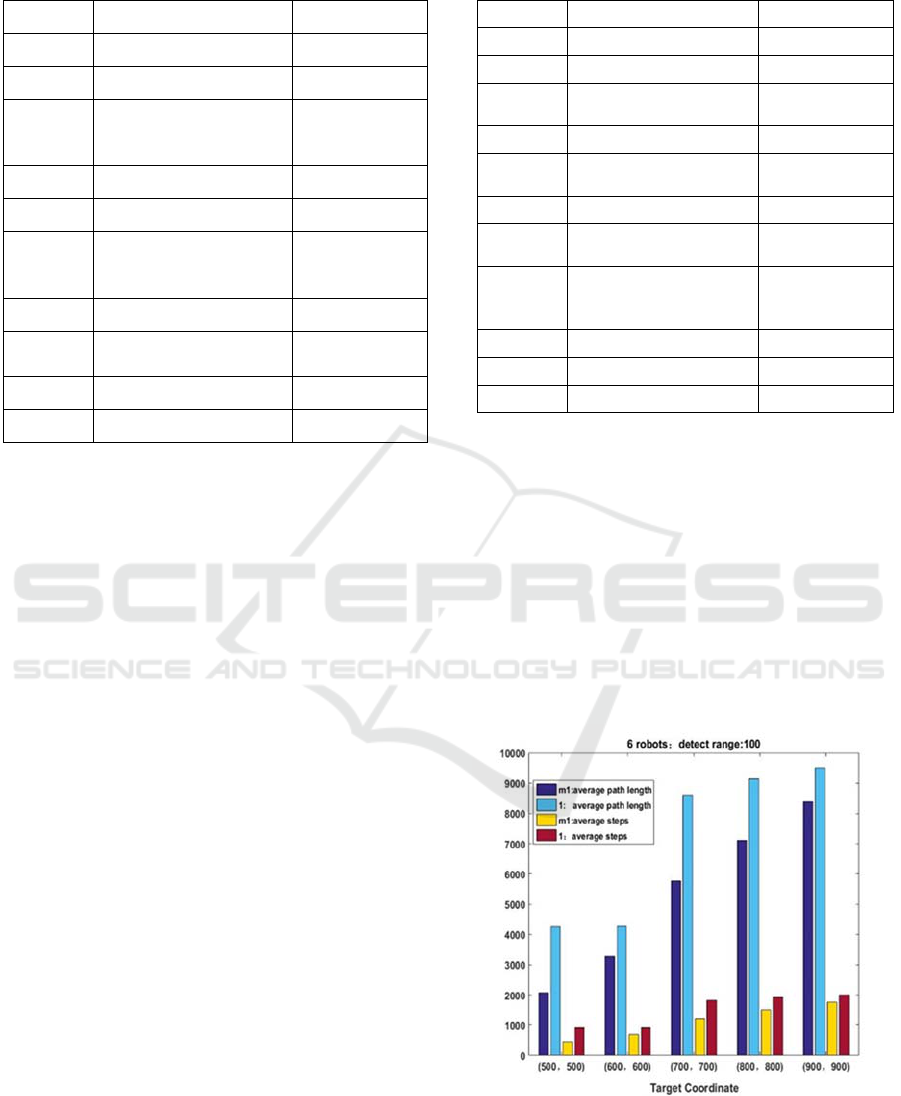
Table 1: Parameter settings for simulation.
Symbol Meaning Value
Nrob Number of robots 6-100
D Number of targets 1-12
E Size of environment
1000*1000-
2000*2000
Rmax Detection distance 100-200
Rcom Communication radius 300
P
The power of the signal
emitted by the target
1000
λ gain 10
Nmax
Upper limit of alliance
size
6
T Maximum time 2000
Vmax Maximum speed 5
5.2 Experiment 1
In the first set of experiments. In order to facilitate the
comparison, the swarm robotic search method in
paper (Liu, 2010) is called algorithm 1, and the
method after using the improved roaming strategy of
APE in this paper is algorithm M1.
In order to highlight the difference of search
efficiency between two algorithms in roaming stage,
the algorithm stops when the roaming algorithm gets
the initial position of the target. What enhances the
alignment of the experiment and highlights the effect
of the improved roaming algorithm.
The starting point of robot is fixed near the
coordinate origin, and the position of target is
changed continuously. This enhances the adaptability
of the model and is more suitable for the search model
in unknown environments. The number of robots is
adjusted to 6 and 12, and the number of targets is
adjusted to 1. Environment size, maximum detection
distance, and other parameters are shown in Table 2.
Table 2: Parameter settings for Experiment 1.
Symbol Meaning Value
Nrob Number of robots 6-12
D Number of targets 1
E Size of environment
1000*1000-
2000*2000
Rmax Detection distance 100-150
R1
Radius of attraction
force
300
R2 Radius of stable region 280
R3
Radius of repulsive
force
180
P
The power of the
signal emitted by the
target
1000
λ gain 10
T Maximum time 2000
Vmax Maximum speed 5
Performance criteria: the probability of
completing tasks, the average steps required to
complete the task, the average path length, the
scalability of the system scale, the adaptability of the
environmental scale, and the adaptability of the
detection range.
In each case, we have done 120 repetitions. Then
the average of the results is calculated. The
probability of the two algorithms to complete the task
is one hundred percent. The comparison of other data
is shown in Fig.2 to Fig.5.
Figure 2: For 6 robots with the detect range of 100.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
482
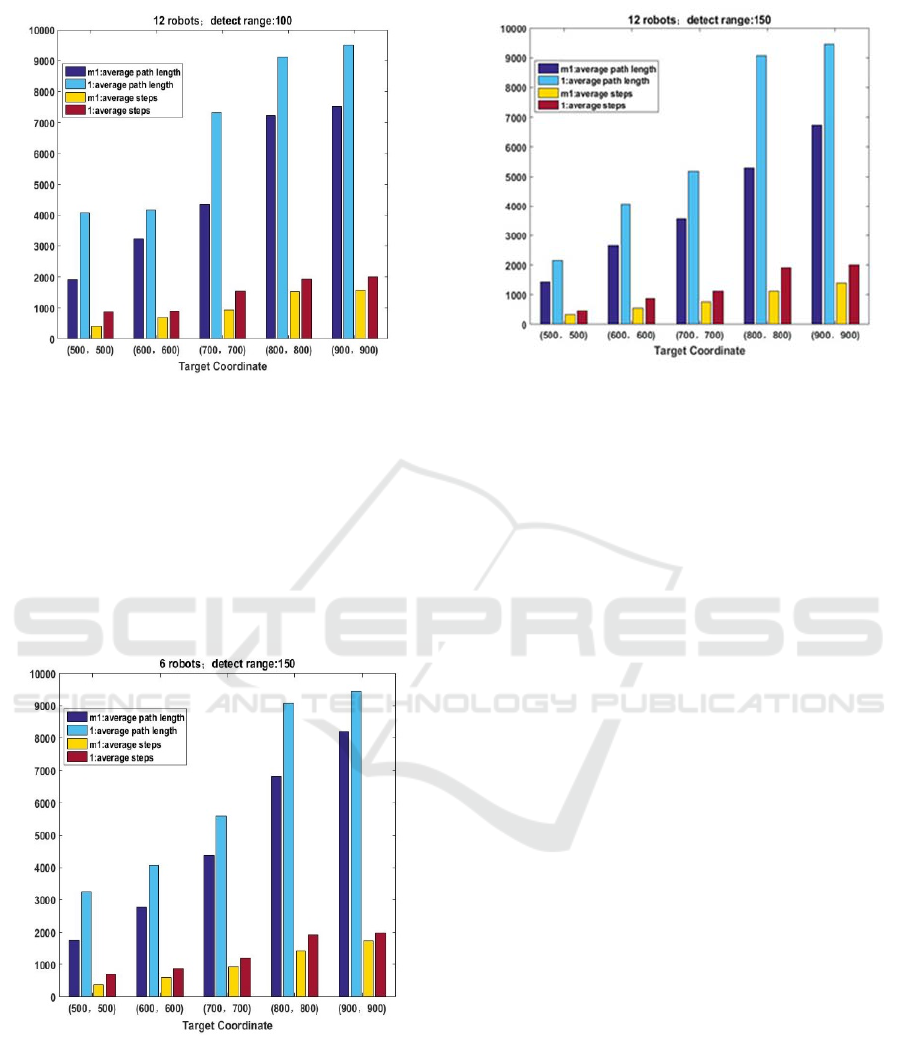
Figure 3: For 12 robots with the detect range of 100.
We can see from Fig.2 and Fig.3 In aspect of
system size, the number of robots in the system
increased from 6 to 12. In aspect of environmental
scale adaptation, the position of the target varies from
(500,500) to (900,900). Compared with the algorithm
1, the algorithm M1 has significant improvement in
two aspects: the average steps required to complete
the task and the average length of the path to complete
the task.
Figure 4: For 6 robots with the detect range of 150.
Figure 5: For 12 robots with the detect range of 150.
Compared with Fig.2 and Fig.3, the detection
distances in Fig.4 and Fig.5 are increased from 100 to
150. Compared with algorithm 1, the algorithm M1
still has significant improvement in two aspects: the
average steps required to complete the task and the
average length of the path to complete the task. Thus,
the advantages of the algorithm M1 are verified in the
detection range adaptation.
In summary, the APE improved roaming strategy
proposed in this paper has obvious effect in
improving the search efficiency of roaming stage.
5.3 Experiment 2
In the second experiment, the particle swarm
optimization algorithm in the literature (Zhang,
2014) is called algorithm 2, and the AO-PSO
algorithm is called algorithm M2.
In order to emphasize the difference between the
two algorithms in the particle swarm search stage, the
roaming stage is not improved. In order to compare
the efficiency of particle swarm optimization after the
improvement of AO-PSO, and enhance the contrast
effect, the maximum detection distance is expanded
to 250. Other parameters such as the size of the
environment, the number of robots, the number of
targets, etc. are shown in Table 3.
An Evaluation of Swarm Robotic Cooperative Target Search
483
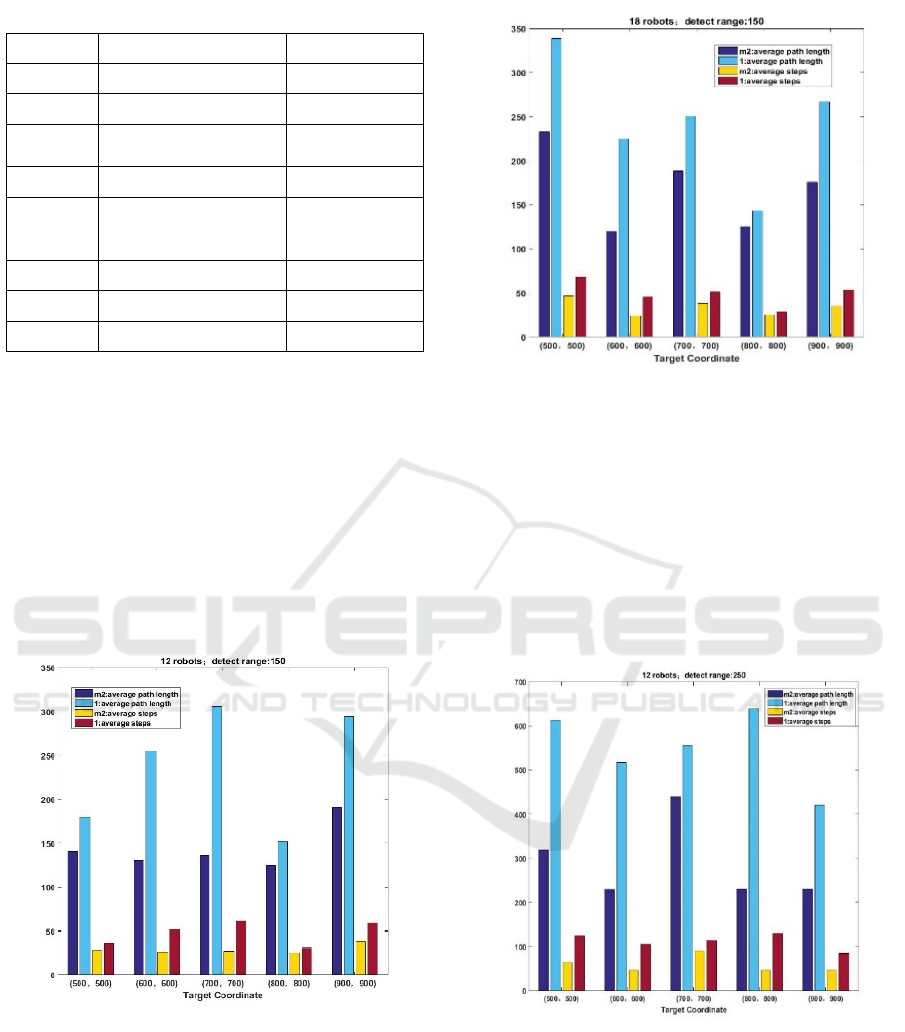
Table 3: Parameter settings for Experiment 2.
Symbol Meaning Value
Nrob Number of robots 12-18
D Number of targets 1
E Size of environment
1000*1000-
2000*2000
Rmax Detection distance 150-250
P
The power of the
signal emitted by the
tar
g
et
1000
λ gain 10
T Maximum time 2000
Vmax Maximum speed 5
Performance criteria: the probability of
completing tasks, the average steps required to
complete the task, the average path length, the
scalability of the system scale, the adaptability of the
environmental scale, and the adaptability of the
detection range.
In each case, we have done 120 repetitions. Then
the average of the results is calculated. The
probability of the two algorithms to complete the task
is one hundred percent. The comparison of other data
is shown in Fig.6 to Fig.9.
Figure 6: For 12 robots with the detect range of 150.
Figure 7: For 18 robots with the detect range of 150.
We can see from Fig.6 and Fig.7. In the aspect of
system size, the number of robots in the system
increased from 12 to 18. In the aspect of
environmental scale adaptation, the target position
varies from (500,500) to (900,900). Compared with
the algorithm 2, the algorithm M2 has significant
improvement in two aspects: the average steps
required to complete the task and the average length
of the path to complete the task.
Figure 8: For 12 robots with the detect range of 250.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
484
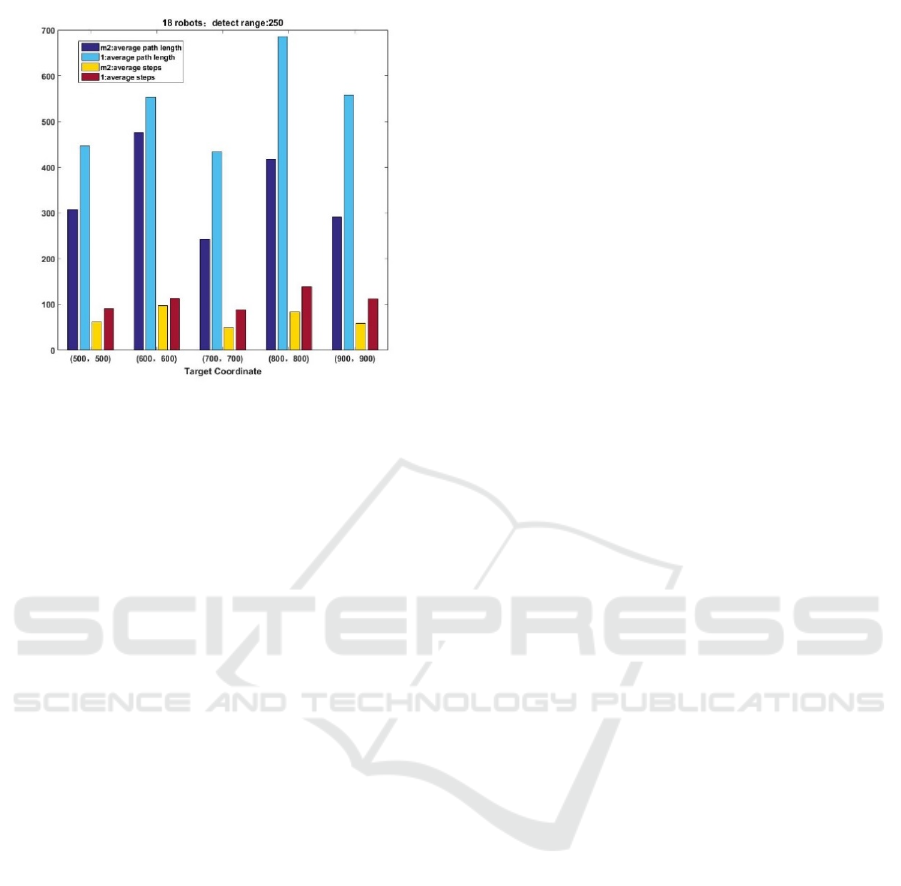
Figure 9: For 18 robots with the detect range of 250.
Compared with Fig.6 and Fig.7, the detection
distances in Fig.8 and Fig.9 are increased from 150 to
250. Compared with algorithm 2, the algorithm M2
still has significant improvement in two aspects: the
average steps required to complete the task and the
average length of the path to complete the task. Thus,
the advantage of the algorithm M2 has the
adaptability of detection range.
In summary, the AO-PSO algorithm proposed in
this paper has obvious effect in improving the
efficiency of particle swarm optimization search
stage.
6 CONCLUSIONS
In this paper, we propose algorithm M1 and algorithm
M2. Two algorithms are used to solve the problem of
comprehensive efficiency in swarm robotic search.
The simulation results show that the algorithm M1
and the algorithm M2 maintain good environment,
system scale, and detection distance fitness. In the
case of the same completion rate, the two improved
algorithms have greatly improved the search
efficiency compared with the original method.
Compared with the algorithm 1, through the
improvement of the M1 algorithm, the time and the
average path to find the approximate location of the
target in the roaming phase are reduced. It effectively
improves the search efficiency of the roaming phase
in swarm robotic search. Compared with the
algorithm 2, the improvement of M2 algorithm
reduces the time consuming and average path of
collaborative search stage, and improves the search
efficiency in the collaborative search phase.
REFERENCES
Şahin, E. (2004). Swarm Robotics: From Sources of
Inspiration to Domains of Application. International
Conference on Swarm Robotics (Vol.3342, pp.10-20).
Springer-Verlag.
Balch, T. (2004). Communication, Diversity and Learning:
Cornerstones of Swarm Behavior. International
Conference on Swarm Robotics (Vol.3342, pp.21-30).
Springer-Verlag.
Xue, S., & Zeng, J. (2008). Swarm Robotics: A Survey. PR
& Al, 21(2), 177-185.
Zeng, J, & Xue, S. (2010). Modeling and Simulation
Approaches to Swarm Robotic Systems. Journal of
System Simulation, 22(6), 1327-1330.
Zhuang, Q. (2013). Prototype system design for
coordinated control research of swarm robotics.
(Doctoral dissertation, Taiyuan University of Science
and Technology).
Doctor, S., Venayagamoorthy, G. K., & Gudise, V. G.
(2004). Optimal PSO for collective robotic search
applications. Evolutionary Computation, 2004.
CEC2004. Congress on (Vol.2, pp.1390-1395 Vol.2).
IEEE.
Pugh, J., & Martinoli, A. (2006). Applying aspects of multi-
robot search to particle swarm optimization.
International Workshop on Ant Colony Optimization
and Swarm Intelligence (Vol.4150, pp.506-507).
Springer Berlin Heidelberg.
Zhang, Y., Xue, S., & Zeng, J. (2014). Dynamic Task
Allocation with Closed-Loop Adjusting in Swarm
Robotic Search for Multiple Targets. Robot, 36(1), 57-
68.
Hoang, A. Q., & Pham, M. T. (2016). Comparing modified
pso algorithms for mrs in unknown environment
exploration.
Pugh, J., & Martinoli, A. (2006). Relative localization and
communication module for small-scale multi-robot
systems. IEEE International Conference on Robotics
and Automation (pp.188-193). IEEE.
Kennedy, J., & Eberhart, R. (2002). Particle swarm
optimization. IEEE International Conference on Neural
Networks, 1995. Proceedings (Vol.4, pp.1942-1948
vol.4). IEEE.
Zhang, Y., Xue, S., & Zeng, J. (2015). Cooperative and
Competitive Coordination in Swarm Robotic Search for
Multiple Targets. Robot, 37(2), 142-151.
Liu, Z., Xue, S., Zeng, J., Jing, Z., & Zhang, G. (2010). An
evaluation of PSO-type swarm robotic search:
Modeling method and controlling properties.
International Conference on Networking, Sensing and
Control (pp.360-365). IEEE.
Pugh, J., & Martinoli, A. (2007). Inspiring and Modeling
Multi-Robot Search with Particle Swarm Optimization.
An Evaluation of Swarm Robotic Cooperative Target Search
485

Swarm Intelligence Symposium, 2007. Sis (Vol.51,
pp.332-339). IEEE.
Xue, S. D., & Zeng, J. C. (2008). Control over swarm robots
search with swarm intelligence principles. Journal of
System Simulation, 20(13), 3449-3454.
Liu, F., Narayanan, A., & Bai, Q. (2012). Effective methods
for generating collision free paths for multiple robots
based on collision type (demonstration). International
Conference on Autonomous Agents and Multiagent
Systems (pp.1459-1460). International Foundation for
Autonomous Agents and Multiagent Systems.
Dias, M. B., Zlot, R., Kalra, N., & Stentz, A. (2006).
Market-based multirobot coordination: a survey and
analysis. Proceedings of the IEEE, 94(7), 1257-1270.
Liu, L., & Shell, D. A. (2012). Large-scale multi-robot task
allocation via dynamic partitioning and distribution.
Autonomous Robots, 33(3), 291-307.
Zhang, G., & Zeng, J. (2011). Area Coverage Algorithm
in Swarm Robotics Based on Wasp Swarm Algorithm.
PR & Al, 24(3), 431-437.
Xue, S. D. (2009). Swarm Robotic Search for Target:
Cooperative Control Techniques, Strategies, and
Simulations. (Doctoral dissertation, Lanzhou
University of Technology).
Hayes, A. T. (2002). Self-organized robotic system design
and autonomous odor localization. California Institute
of Technology.
Meng, Q., Li, F., Zhang, M., Zeng, M., & Wei, X. (2008).
Study on Realization Method of Multi-Robot Active
Olfaction in Turbulent Plume Environments. ACTA
AUTOMATICA SINCA, 34(10), 1281-1290.
ICECTT 2018 - 3rd International Conference on Electromechanical Control Technology and Transportation
486
