
Mechanical Analysis and Structure Optimization of Lunar Soil
Coring Mechanism
Qiuyi Fang
1,*
Qin Zhou
2
, Jianguo Lv
2
and Jing Wang
3
1
Sergeant school of CAPF; #377 Tianmu Shan Road, Xihu District, Hangzhou, Zhejiang
2
China University of Geosciences, Beijing; #29 Xueyuan Road, Haidian District, Beijing
3
Sinomine Resource Exploration
;
#11 Changchunqiao Road, Haidian District, Beijing
Email: fangxiaoqiu@126.com
Keywords: Coring mechanism, mechanical model, bedding information-keeping, structure optimization
Abstract: The soft bag lunar soil coring mechanism of turning inward type without sliding has the characteristics of
simple structure, low power dissipation and well regolith bedding information-keeping. However, at the
initial coring stage, the large pulling force and torque, which are resulted from the spiral movement of lunar
soil around bit when it enters the holding-pipe, can consequently cause high power dissipation and bad
regolith bedding information-keeping. In the paper, in order to achieve the goal of the minimum of pulling
force and torque, a mechanical model representing the interaction of lunar soil on coring mechanism was
established to analyze effects of structural parameters and drilling parameters on the pulling force and
torque. The structural parameters of coring mechanism and drilling parameters were optimized. The results
show that soft bag thickness and guide head radius have the greater impact on the pulling force and on the
torque respectively. When the guide head radius is 0.5mm and the soft bag thickness is 0.2mm, the rope
pulling force can reach its optimal value of 89N, which can greatly reduce the degree of torsion in the
process of coring.
1 INTRODUCTION
Probing the moon’s material composition has great
significance on studying the origin of the moon and
the earth, the earth's climate, and the phenomena of
tidal waters. Drilling and sampling the surface of the
moon are prerequisite for achieving this research
work (Yan et al., 2004).
There have been some successful sampling
precedents of lunar soil abroad, however, coring
methods and working mechanism of deep lunar soil
coring domestically are still staying at theoretical
and experimental research stage. In the Apollo
program, for example, the core was extracted using a
cemented carbide tube (The Apollo 17 mission” on
http://spaceflight1.nasa.gov/history/apollo/). This
device for sampling cores was easily operated but
with poor bedding information (Berry, 1970). In the
Luna24 program, the soft bag coring mechanism of
turning inward type was initially applied and the
core of 250cm depth can be successfully extracted
with good bedding information-keeping
(http://www.zarya.info/Diaries/Luna/Luna.php). Due
to its good performance, such a turning inward type
device will be a great potential, which is well worth
being researched (Zhang, 2010). Some domestic
scientific research units, such as Beijing Satellite
Manufacturing Factory, Harbin Institute of
Technology and China University of Geosciences,
are also carrying out some researches (Duan et al.,
2009). In terms of mechanical model, the mechanics
characterizes of the drill (Li, 2012), the bit 0 Tang,
2012) and other structural joints have been mainly
analyzed (Liu, 2011). The interaction among the
inner parts of the core body, such as the soft bag, the
holding-pipe, the drill rod and the lunar soil, in the
drilling process is rarely analyzed. Little information
is available. In the analysis of lunar soil coring
mechanism mechanics characterizes,Wang Guoxin
and others, from Beijing Satellite Manufacturing
Factory,using a simplified mechanical model, has
not considered the influence of the speed when soft
bag turning in (Zhao et al., 2012). The effect of soft
bag turning on regolith bedding information-keeping
was not analyzed either (Wang, 2012). Although the
researchers of Harbin Institute of Technology have a
comprehensive study on the coring mechanism, the
influence of the structural parameters and drilling
parameters on sampling is not studied
Fang, Q., Zhou, Q., Lv, J. and Wang, J.
Mechanical Analysis and Structure Optimization of Lunar Soil Coring Mechanism.
In Proceedings of the International Workshop on Environment and Geoscience (IWEG 2018), pages 533-540
ISBN: 978-989-758-342-1
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
533

simultaneously (Gong et al., 2012). Especially in the
initial stage of coring, the interaction among soft
bag, lunar soil and coring mechanism is the most
complex, which few studies have ever researched
before.
In view of the above research, this paper carries
out the mechanical model of the coring mechanism
in the initial sampling stage and optimized of the
core mechanism. Taking the minimum of the sample
load and the torque as the optimization objective, the
structure parameters and the drilling parameters are
used as variables, then using the control variable
method to analyze and get the optimal value.
2 THE COMPOSITION AND
WORKING PRINCIPLE OF
CORING MECHANISM
The coring mechanism mainly consists of hollow
coring tool, drill bit, holding-pipe, soft bag, rope,
sealing components and other appendages. Figure
1is the structure diagram.
The soft bag is installed outside the holding-pipe,
which is screwed inside the hollow rod through
thread. When sampling, with the drill feeding, soft
bag turns inward and wraps the soil gradually. The
sample pushing into the soft bag with soft bag
remains relatively stationary. After drilling, we can
get a cylindrical lunar soil core wrapped by soft bag
inside the holding-pipe.
Figure 1: Structure diagram of coring mechanism.
Figure 2: The interaction relationship between lunar soil
and coring mechanism.
In the initial stages of drilling, due to the soil-
breaking perturbations by drilling and the spacing
between drill and holding-pipe, the lunar soil around
the drill bit into the holding-pipe as the way of a
spiral motion. Under the disturbance of lunar soil
movement and the lateral pressure that lunar soil
entering the coring mechanism on the soft bag, the
resistance of soft bag turning inward and the trend of
soft bag twisting are increased. The interaction
relationship between the bit, lunar soil and coring
mechanism in this stage is shown in Figure 2.
Therefore, the force condition of soft bag around
guide head is the key to affect the quality of
sampling and the power dissipation.
3 MECHANICAL MODEL
REPRESENTING THE
INTERACTION BETWEEN
LUNAR SOIL AND CORING
MECHANISM AROUND THE
GUIDE HEAD
Now suppose that the guide head has ideal structures
and the soft bag is an absolutely flexible mechanism,
which works as belt driving (Gong et al., 2012).
Around the guide head, the soft bag is divided into
circumferential infinitesimal and tangential
infinitesimal to make the analysis on the internal and
external forces. The forces like tangential tension of
infinitesimal T(α), the frictional resistance of
infinitesimal F
ƒ
and the circumferential tensioning
force of infinitesimalT
r
(α)are shown in Figure 3 and
Figure 4. The force equilibrium equations of soft bag
were established (Wang, 2012; Cao and Gu, 2004).
Figure 3: Infinitesimal radial force of soft bag.
IWEG 2018 - International Workshop on Environment and Geoscience
534

Figure 4: Infinitesimal circumferential force of soft bag.
The circumferential infinitesimal width of center
angle dθ corresponds to the one of soft bag; the
tangential infinitesimal can be obtained by
continuously dividing the circumferential
infinitesimal on length,which corresponds to the
length of center angle dα.Then the soft bagsurface
infinitesimal ds can be got. According to the
derivation of Euler's formula, the dynamic
equilibrium equation of ds was established (
Cao
and Gu, 2004)
..
3.1 The Dynamic Equilibrium
Equations of Infinitesimal
The radical and tangential force balance has been
analyzed and expressed as equation 1:
()
ττ
σ
α
α
ma)dN(f
2
d
cosT
2
d
cosdTT:0F
n
−+⋅+⋅=⋅+=
∑
(1)
()
nnn
madN
d
sinT
d
sindTT:F ++=⋅+⋅+=
∑
σ
α
α
22
0
(2)
Let
=
n
NdN
σ
+
,
sin
2
d
aa
τ
α
=⋅
,
cos
2
n
d
aa
α
=⋅
Based on the limit principle, we can get:
cos ~ 1,sin ~ ,sin ~ sin ,cos ~ cos
222 2 2
ddd d d
ααα α α
αααα
⎛⎞ ⎛⎞
++
⎜⎟ ⎜⎟
⎝⎠ ⎝⎠
Substituting them into equation (1) and (2), it
gives:
n
NTd ma
α
=⋅ −⋅ (3)
dT f N m a
τ
=⋅−⋅ (4)
From the equation above, the relationship among
tangential tension of infinitesimal can be got, the
angle of guide head and the radial and tangential
acceleration of soft bag:
()
n
dT f T d m a m a
τ
α
=⋅ ⋅ −⋅ −⋅
(5)
Among them,
()
mRd
ρ
α
=⋅ ⋅
(ρ is the linear
density of soft bag(axial direction)).
By dividing d
α
on both sides of the equation, we
can get:
()
n
dT
f
Td Ra Ra
d
τ
αρ ρ
α
=⋅ ⋅ − −
(6)
According to the boundary conditions when soft
bag turning inward, we can get soft bag tension
boundary value in the infinitesimal direction,
namely:
When
()
1
0
0 TF
α
==,
, the friction between soft
bag and the outside wall of holding-pipe;
When
()
2
TF
π
απ
==,
, the pulling force of
rope.
In the integral form of (6):
21
11
=
f
nn
F
fe F Ra Ra Ra Ra
ff
π
ττ
ρρρρ
⎛⎞
⋅− −⋅ + +
⎜⎟
⎝⎠
(7)
F
1
is the friction between soft bag and the outside
wall of holding-pipe;
The formula (7) provides a theoretical basis for
mechanical analysis of soft bag turning inward. It
shows the dynamic relationship between the pulling
force of rope and the wrap angle of soft bag, with
the acceleration of soft bag’s movement, and gives
the quantitative relationship among force, friction,
the radius of guide head and the linear density of
soft bag intuitively.
3.2 The Mechanical Model of Pulling
Force of Soft Bag Turning Inward
at the Initial Stage
In the initial stages of drilling, due to the soil-
breaking perturbations by drilling and the spacing
between drill and holding-pipe, the lunar soil around
the drill bit verb into the holding-pipe as the way of
a spiral motion. Relative to the smooth transition of
coring, the resistance of soft bag overturning
increases. The friction is relatively the largest during
the process of coring. At the same time, because of
the soft bag with a maximum acceleration in this
stage, the external force that needed is greater as
well. Based on the analysis above, the forces of the
soft bag at this stage are the most complicated, the
mechanical analysis of the stage is representative.
The following will give the unfolding calculation
of the formula(7), to provide a basis for optimizing
the coring mechanism by analyzing the pulling force
of rope’s mechanical relations between structural
parameters of coring mechanism, drilling parameters
and physical characteristics of lunar soil.
(1) Calculate the radial tightening force of soft
bag
The formulas and relations between the radial
tightening force and the circumferential tensioning
force are expressed as follows:
Mechanical Analysis and Structure Optimization of Lunar Soil Coring Mechanism
535

⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
⋅=
−
⋅⋅=
⋅=
bdlA
d
dd
AET
d
sinTF
Lr
rr
2
22
2
2
0
01
θ
(8)
A. In the guide head, the radial tightening force
of soft bag:
()
10
22 cosddRR d
αα
=++⋅ +
(9)
Therefore:
()
0
21cos
L
r
rr
EbR d
Tdl
d
FTd
αα
θ
⎧
⋅+ +
⎡⎤
⎣⎦
=⋅
⎪
⎨
⎪
=⋅
⎩
(10)
()
1
,cos
2
r
d
dN F
α
θα α
⎛⎞
=⋅ +
⎜⎟
⎝⎠
(11)
B. Outside the holding-pipe, the radial tightening
force of soft bag:
()
10
0
L
r
rr
Eb d d
Tdl
d
FTd
θ
⎧
⋅−
=⋅
⎪
⎨
⎪
=⋅
⎩
(12)
()
2
,
r
dN F
θα
=
(13)
Therefore, the maximum radial tightening force
of infinitesimal is:
() () ()
12
,,,dN dN dN
θα θα θα
=+
cos
2
rr
d
F
F
α
α
⎛⎞
=⋅ + +
⎜⎟
⎝⎠
(14)
()
[]
dld
d
)dd(bE
dldd
d
)
),(N
2
0
d
0
0
01L
2
0
2
0
cos1R2d
0
0
11
⋅
−⋅
+⋅⋅
+⋅
=
∫∫∫∫ ∫
⋅+−⋅
θθα
α
αθ
π
π
π
π
απ
cos(1bR2E
L
()
2
11 10
0
2
4,
l
Eb
BR d R Bd x B x d d
d
π
⎛⎞
=−+Δ= Δ=−
⎜⎟
⎜⎟
⎝⎠
(15)
Integrating the force in the axial direction, can
get the total radial tightening force of soft bag N (z):
() ( )
2
11
00
4
R
L
Nz BR d R dz Bd xdz
π
=⋅−⋅+⋅Δ⋅
∫∫
()
2
11
4
B
Rd R BdLx
π
=−+⋅Δ
(16)
(2) Calculate the lateral pressure σ
z
of the lunar
soil
The lateral pressure σ
z
of the lunar soil at any
depth can be equivalent to the earth pressure at rest,
and σ
z
is proportional to its self-weight σ
v
, which
can be expressed as (Chen et al., 1994):
0z
k
ν
σσ
=⋅ (17)
Where,
k
0
—Coefficient of earth pressure at rest, the
relations between k
0
and internal friction angle of
lunar soil approximated as (Zhang, 2000):
0
1sink
ϕ
=−
σ
v
— The gravity stress of lunar soil,
()
()
2
1
0
4
4
z
dR
az zdz
ν
σπ ρ
−
=⋅ ⋅ ⋅
∫
(In which,
()
z
ρ
— The spontaneous stacking
density of lunar soil (Qin, 1998),
()
()
()
3
1.92 12.2
/
18
z
zgcm
z
ρ
+
=
+
is the best estimate;
a —The gravitational acceleration of Moon (Zheng
et al., 2004),
6
g
a =
;)
Substituting them into the formula of σ
v
to
calculate the gravity stress of lunar soil:
()
()
() ()
⎥
⎦
⎤
⎢
⎣
⎡
+
−+−+⋅+⋅−=
18z
z2
18zln2.1218zlnz2.12zR4dg80
2
2
1v
πσ
(18)
Since this is a mechanical analysis for soil-
breaking critical state when drilling, the value of
σ
v
can be simplified as:
()
2
1
16.74 4
v
dRg
σπ
=⋅−⋅
() ()()
2
1
1 sin 16.74 1 sin 4
zv
g
dR
σϕσπϕ
=− ⋅ = − ⋅ −
(19)
(3) Calculating the pulling force
The total pressuresthat soft bag roleson holding-
pipe is the sum ofthe radial tightening force and the
lateral pressure of lunar soil:
()
z
NNz
σ
=+
()
2
011
4
2
z
kBRdRBdLx
π
σ
=⋅+ ⋅ − + ⋅Δ (20)
Then the maximum static friction force of soft
bag turning inward in the initial stage can be got:
1
F
fN=⋅
() ( )()
[
]
2
111
2
R4dsin1g74.16xLBdR4dBRf −⋅−+Δ⋅+−⋅⋅=
ϕππ
(21)
Substituting (21) into (7) gives the pulling force
of rope F
2
:
() ( )()
ττ
π
ρρρρϕππ
Ra
f
1
RaRa
f
1
RaR4dsin1g74.16xLBdR4dBRfeF
nn
2
111
2f
2
++
⎥
⎦
⎤
⎢
⎣
⎡
−−−⋅−+Δ⋅+−⋅⋅=
(22)
Equation (22) gives a calculation formula of
pulling force of rope in the initial stage. This also
links the pulling force with structure parameters and
drilling parameters.
IWEG 2018 - International Workshop on Environment and Geoscience
536

3.3 Analytical Model of Soft Bag
Torque
At the beginning of coring, the lunar soil entering
the soft bag has acircular motion tendency. Under
the effect of sliding friction force, which was caused
by the lunar regolith and soft bag, soft bag will come
about twisting phenomenon. This will affect the
bedding information of sampling. For the
phenomenon above, building the analytical model of
soft bag torque is of great significance for
optimizing the structural parameters of coring
mechanism (Fei et al., 2008)
(1) Calculate the torque T
1
T
1
is generated bythe radial tightening force of
soft bag and the centripetal force of ROP. The
infinitesimal torque generated by the radial
tightening force of infinitesimal is:
Calculate centripetal force:
()
22
1
4
nn
F
Vd Rd
π
ρ
α
=⋅⋅⋅⋅
(23)
Where, F
r
is the radial tightening force of soft
bag in guide head. The tangential friction F
ƒ
that
aroused by the centripetal force and the radial
tightening forceoutside the holding- pipe wall can be
expressed as:
()
f
nr
FfFF=⋅ +
(24)
The torque caused by F
ƒ
can be expressed as:
1
1
2
rf
d
TF=⋅
() ( )
22 2
1
11
44
2
n
d
f
Vd Rd BR d R
πρ απ
⎡⎤
=⋅ ⋅⋅+ ⋅−
⎣⎦
(25)
Integrating the torque, the total torque generated
by the radial tightening force of soft bag can be got:
()
2
222
11 1 1
0
42
2
rn
Tfd BRdR VdRd
π
π
π
ρ
α
⎡⎤
=⋅ ⋅− + ⋅ ⋅
⎢⎥
⎢⎥
⎣⎦
∫
()
232
11 1
4
2
n
f
dBRdR VdR
π
π
ρ
⎡⎤
=⋅ ⋅− +⋅
⎢⎥
⎣⎦
(26)
(2) Calculate the torqueT
2
The sliding friction force, which produced by the
lunar regolith and soft bag, can be expressed as:
f
yr n
F
μ
σ
=⋅
() ()
2
1
= 1 sin 16.74 4
yr
dRg
μϕπ
⋅− ⋅ ⋅ − ⋅
(27)
(
: The friction coefficient between lunar soil
and soft bag)
To make the central axis of holding-pipe as the
axis, the torque T
2
is generated by F
ƒ
as follow:
1
2
=
2
f
d
TF⋅
() ()
2
1
1
1 sin 16.74 4
2
yr
d
dRg
μϕπ
=⋅− ⋅ ⋅− ⋅⋅ (28)
(3)Calculate the total torque T
The algebraic sum of T
1
and T
2
is the total
torque:
12
TTT=+
() ()()
2
d
gR4dsin_17.16RdVR4dBR
2
fd
1
2
1yr1
2
n
3
1
2
1
⋅⋅−⋅⋅⋅+
⎥
⎦
⎤
⎢
⎣
⎡
⋅+−⋅⋅=
ϕμπρπ
π
(29)
The value of torque will represent the extent of
soft bag twisting directly, the smaller of T, the more
conducive to coring, and vice versa. The parameters
that influence T are given by formula (29), such as
ƒ, E
l
, b, d
1
, L, d
0
, V
n
..
4 ANALYSIS OF THE
INFLUENCE OF PARAMETERS
ON PULLING FORCE AND
SOFT BAG TORQUE
The analysis of regression of the dynamic model has
been made to figure out the law representing the
influence of structural parameters on the soft bag
torque and the hauling cable pulling force. Then the
structural parameters of the simulation coring
mechanism have been optimized to achieve the goal
of minimizing the resistance force of the soft bag
when overturning and the torque T.
Based on the models of F
2
and Torque:
1
2
0
1
0
,,,,,,,,,
,,,,,, ,
ln
lyrn
f
ERbdL aa
F
d
fERbd V
T
d
τ
ϕρ
ϕμ
⎧
⎛⎞
∝
⎪
⎜⎟
⎝⎠
⎪
⎨
⎛⎞
⎪
∝
⎜⎟
⎪
⎝⎠
⎩
The parameters of , , ,
,,
will be
analyzed through numerical simulation. When in
different drilling rates, the corresponding
accelerations of soft bag in critical states can be
obtained in experimental data. (Let the friction angle
of lunar soil is 40°, friction coefficient between
soft bag and lunar soil is 0.75 (Slyuta, 2014), the
value of drilling depth is 0m, elastic modulus E
l
around 17.8Gpa, linear density
ρ
is 100g/m (Wang
et al., 2001).)
Based on the spatial constraint condition of the
coring mechanisms used in China third lunar
exploration project and the drilling parameters of
Luna-24 used in former Soviet, the constraint
condition of basis data can be expressed as follows:
Mechanical Analysis and Structure Optimization of Lunar Soil Coring Mechanism
537
0
0.15 1
0.5 2
0.171 0.385
14.5 23
0.3 4
10 20
5/min 50/min
60 / min 500 / min
n
mm b mm
mm R mm
f
mm d mm
mm x mm
mm L mm
cm V cm
rVr
≤≤
⎧
⎪
≤≤
⎪
⎪
≤≤
⎪
≤≤
⎪
⎨
≤Δ ≤
⎪
⎪
≤≤
⎪
≤≤
⎪
⎪
≤≤
⎩
Using the method of regression analysis, a goal
function with different ranges has been obtained
within differentparameters. In order to ensure that
the impact of the parameters on the objective
function is comparable, when the objective function
is changed in the range of the corresponding
parameters, the values of the other parameters are
not optimized.Influence of various parameters on the
tension F
2
.
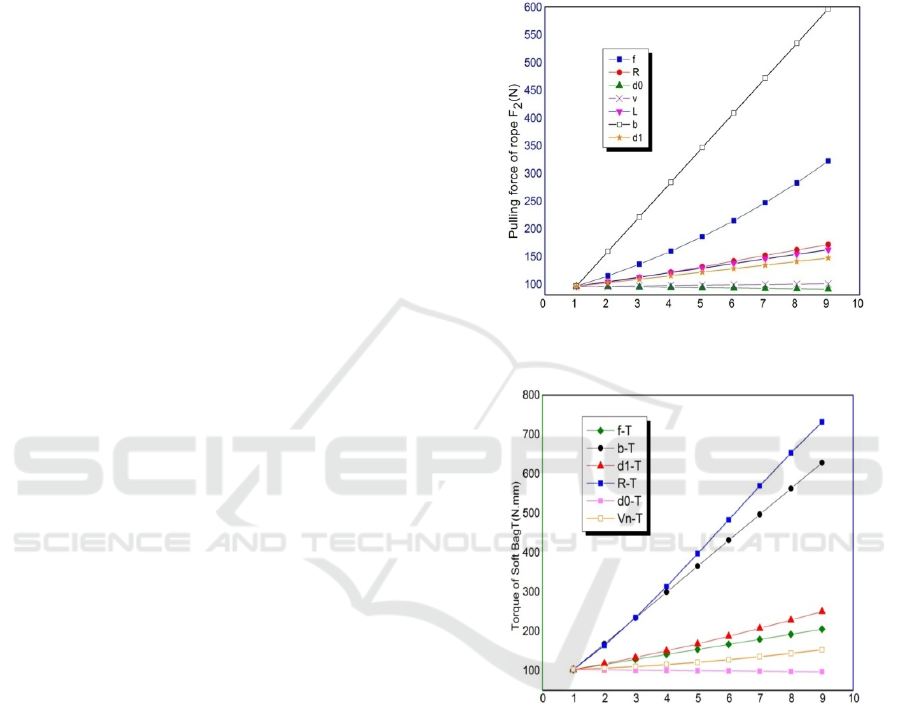
(1) The influence of parameters on F
2
It shows that F
2
(s) is related to f, R, b, d
1
, L, d
0
.
Specially, the value of F
2
has a compound
relationship with f, d
1
and the fillet radius R. Unlike
guide head radius R, the parameters of b, L, a
n
and
a
τ
are proportional to F
2
. Figure 5 plots the
relationship between different parameters and the
pulling force of rope.
The results show that the greatest varying range
of F
2
occurs at the range of soft bag thickness, at
which the varying ranges of f, b and d
0
will decrease.
In addition, d
1
has the least influence on the range of
F
2
.
(2) The influence of parameters onT
The function of T(s) shows the relations between
torque T and f, b, d
1
, d
0
, b and V
n
. Among them,b is
proportional to T in linear relationship. In addition,
d
0
is inversely proportional to T. Figure 6 shows the
relationship between different parameters and the
torque of soft bag.
The results show that the greatest varying range
of T occurs at the direction of the fillet radius, at
which the varying ranges of f, b and d
0
will
successively decrease. In addition, d
0
has the least
influence on the range of T.
(3)The optimization of structural parameters and
drilling parameters
By the analysis above, the influence of different
factors on the objective function is at different
levels,the results show that the structural parameters
of coring mechanism and the drilling parameters
have a certain proportion of influence on both
pulling force of rope and soft bag torque, which
should be paid an equal attention on design and
optimization.
Based on the results above, the values of the
parameters of f,R,b,d
1
,and L will decrease with the
increasing d
0
, which benefits for coring. Therefore,
when the values of structural parameters and drilling
parameters are taken the optimal values, as shown in
Table 1, the coring mechanism optimized.
Figure 5: The relation curve between the structure
parameters and the objective function F2.
Figure 6: The relation curve between the structure
parameters and the objective function T.
Note: In Figure 5 and Figure 6, the coordinates of
the X axis are equal to eight aliquots for each
parameter.
In practice, we need to balance the various
parameters according to the working conditions and
constraints. We can further verify the optimization
results with the experimental results, then to adjust
the optimization scheme.
IWEG 2018 - International Workshop on Environment and Geoscience
538

Table 1: The value of structural parameters and drilling
parameters before and after optimization.
Parameters Un-
o
p
timized
Optimized
The friction coefficient of
soft bag and Holding-pipe
·f
0.296 0.171
Guide head radius·R/mm
1.5 0.5
Soft bag thickness·b/mm
0.75 0.15
Holding-pipe
outerdiameter·d
1
/mm
23 15
The length of nested
segment soft bag·L/mm
15 10
Soft bag diameter at
natural state·d
0
/mm
20 14
Penetration
rate·V(mm/min)
500 80
Revolution
rate·V
n
(r/min)
120 60
Note: The un-optimized value comes from the experiment
when the coring mechanism was taken to verify the
feasibility.
5 CONCLUSIONS
1. The influences of structural parameters and
drilling technology on coring mechanism at the
critical state of static-motion have been
comprehensively analyzed in this paper. The
mechanical model has been established representing
the force at the beginning between soft bag
overturning and lunar soil. In other words, a
dynamic equation has been established to represent
the overturning movement of the soft bag and a
torque model representing.
2. Based on results of the proportion of influence
of different factors on pulling force and torque, it
shows that the soft bag thickness is the most
influential factor on pulling force, and guide head
radius is the most influential factor on torque.
Among the factors of drilling technology, drilling
rate has little influence on pulling force while the
revolution rate has greater influence on soft bag
torque.
3. The conclusion can be achieved after
optimizing the mechanical model: When the s guide
head radius is 0.5mm, soft bag thickness is 0.15mm,
holding-pipe outer diameter d
1
is 15mm and soft bag
diameter at natural state d
0
is 14mm, the energy
consumption is lower and sample bedding is better.
LIST OF SYMBOLS
d
1
: Holding-pipe
outer diameter
T
r
(α): Infinitesimal
circumferential
tensioning force
d
2
: Rope diameter
d
α
: The angle between
infinitesimal and the axis
o
p
i
p
e
d
0
: Soft bag
diameter at natural
state
f
F
: Infinitesimal
frictional resistance
b: Soft bag thickness
σ
n
: Lunar soil lateral
p
ressure
s: Holding-pipe
thickness
()
r
F
α
: The radial
tightening force of soft
b
ag
R: Guide head radius
ρ
:The linear density of
soft bag(axial)
L: The nested
segment length of
soft ba
g
E
l
: The circular elasticity
modulus of soft bag
V , V
n
: Penetration
rate, revolution rate
α
: The wrap angle of soft
b
a
g
around
g
uide hea
d
A: Cross-sectional
area of infinitesimal
k
0
: Coefficient of earth
p
ressure at
r
est
a
τ
: Tangential
acceleration of soft
b
ag movement
σ
v
: The gravity stress of
lunar soil
a
n
: Radial acceleratio
n
soft bagmovement
()
z
ρ
: The spon
t
stackin
g
densit
y
of lunar s
o
T(
α
),T(
α
)+dT: Infini
tangential tension
a: Gravitational accelera
t
Moon
REFERENCES
“Exploring the Moon - Luna 15 through Luna 24” on
http://www.zarya.info/Diaries/Luna/Luna.php
“The Apollo 17 mission” on
http://spaceflight1.nasa.gov/history/apollo/
Berry, R. L. 1970 AIAA Aerospace Sciences Meeting, New
York 02 19-21
Cao Zhujia and Gu Zhanshan 2004(12) Application of
Euler's formula in mechanical design [J] Machinery
Manufacture 2 10-11
Chen Zhongyi, Zhou Jingxing and Wang Hongjin 1994
Soil mechanics[M] Beijing: Tsinghua University Press
12 196-199
Duan Xinsheng, Yan Taining, Gu Xiang, Duan Suhao
2009(11)
Elementary analysis on one of the possible
drilling and sampling techniques for China Lunar
exploration project [J] Geological Science and
Technology Information 28(6) 125-128
Fei Xuebo, Huang Chunming and Chen Naili 2008
Theoretical Mechanics[M] Higher Education Press 10
194-197
Mechanical Analysis and Structure Optimization of Lunar Soil Coring Mechanism
539

Gong Xu, Wang Qingchuan, Zeng Ting, et al. 2012
Chinese Society of Astronautics deep space
exploration[N] Technical Committee of the Ninth
Annual Conference Proceedings 12 910-917
Li Liangliang. Research on evaluation of lunar soil
drilling-sampling characteristics and influence factors
[D] Master Degree thesis of Harbin Institute of
Technology 2012(07)
Liu Fei. Research on drilling-sampling performance based
on interaction model between drill and lunar soil [D]
Master Degree thesis of Harbin Institute of
Technology 2011(06)
Qin Zhihai 1998 Soil Mechanics and Foundation [M]
Beijing: China Water&Power Press 12 110-119
Slyuta E N 2014 Solar System Research 09(48) 330-353
Tang Tingwu.
Optimization Of structure parameters of
sampling core drill for deep Lunar soil [D] Master
Degree thesis of Harbin Institute of Technology
2012(07)
Wang Bin, Jin Zhihao, Qiu Zheming and Liu Mu 2001
Experimental study of Basic properties of PBO
organic fiber [J] Journal of Xi’AnJiaotong University
11 (35) 11
Wang Guoxin 2012 Chinese Society of Astronautics deep
space exploration[N] Technical Committee of the
Ninth Annual Conference Proceedings 12 978-986
Yan Taining, Bu Jiawu, Wu Xiang, Wang Rongjing
2004(12) Difficulties and key technologies of Lunar
drilling and sampling[J]
Geological Science and
Technology Information 23(4) 12-15
Zhang Yu. Research on the key technologies of drilling-
sampling system of slide-type for lunar soil[D] Master
Degree thesis of Harbin Institute of
Technology,2010(06)
Zhang Zhenying 2000 Rock and Soil Mechanics[M]
Beijing: Tsinghua University Press 12 151-153
Zhao Zeng, Meng Weijie, Wang Guoxin, Li Jun 2012
Chinese Society of Astronautics deep space
exploration[N] Technical Committee of the Ninth
Annual Conference Proceedings 12 896-902
Zheng Yongchun, Ouyang Ziyuan, Wang Shijie, Zou
Yong-Liao. Physical and mechanical properties of
lunar regolith Mineral Petrol,2004(12), 24(04): 14-19
IWEG 2018 - International Workshop on Environment and Geoscience
540
