
Developing the Hybrid Stepper Motor Model for Tracking
Purpose Using New Methodology
N A Hamid
1
, A Abdelrahim
2
and M M Ahmed
3
1
School of Control and Computer Engineering-North China Electric Power
University
2
School of Control and Computer Engineering-North China Electric Power
University
3
Turkish Engineering Company
Corresponding author and e-mail: N A Hamid, antnr2011@yahoo.com
Abstract. Most control systems are working on the measurement coordinates and trajectories
of dynamic targets in the space need to particular type of motor to meet the accuracy. It has
demanding requirements for tracking the performance of the system. The currently used
different soft computing techniques for step response enhancement of hybrid stepper motor
are used to build up a model using MATLAB software package. The objective of the present
paper is to use PSD fuzzy controller to enhance the performance of the open loop control
system to control the speed and position of the hybrid stepper motor performance. It was
represented by 2DOF with a fuzzy controller and received an excellent response and good
result. The difficulties are great and real time implementation of control actuation the
controlling of position of hybrid stepper motor and to improve motors efficiency. The
fieldoriented for a PM stepper motor application is presented in order to demonstrate the
effectiveness for this real time embedded controller, t the proposed control algorithm will
realize better rise time and less overshoot better and detailed analysis is carried out to confirm
the viability of the proposed system.
1. Introduction
Stepper motors have been found a wide range of applications in machines and devices where
robustness, accuracy and small size at a low cost are needed. The stepper motor can be operated in
three different stepping modes namely full-step and micro step. Micro stepping has many advantages
compared with other modes of excitation. An open loop position controlled stepper motors are well
suitable for more application, but they show a poor performance with respect to very precise motion
control and high dynamic requirements. Micro stepping is used in applications that require accurate
position.
Fuzzy logic control is used in widespread system nowadays. It’s an automatic control and a self
acting mechanism that controls and objects in accordions with a desired behavior. Figure 1 shows the
block diagram of the controller system. The two inputs of the fuzzy controller are the error e and
change of error Δe [1]. Advantages of fuzzy control such as fast input response, short transition
process, flexible, easy computation.
174
Hamid, N., Abdelrahim, A. and Ahmed, M.
Developing the Hybrid Stepper Motor Model for Tracking Purpose Using New Methodology.
In Proceedings of the International Workshop on Materials, Chemistry and Engineering (IWMCE 2018), pages 174-182
ISBN: 978-989-758-346-9
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

All modern control for optimization purpose we need to create a special type of controller to adapt
the entire control system. PSD fuzzy logic controller is a new type of controller used in the model to
track the reference signal, it consists of combined of 2DOF PID with fuzzy controller. It realizes: (i)
improved stability, (ii) good response, (iii) simple control configuration, and (iv) accurate result.
The main objective of this paper is to develop the required linear motor model in the control
systems that require high accuracy by using the focus and the feedback with a new type of controller
called fuzzy PSD to solve the problem of non-linear model and get the best response and minimize
the error.
Figure 1. Block diagram of proposed model.
The application is developed as a Simulink model and consists of the controlled subsystem
(stepper motor and the controller [2], presented in figure 1.
2. Methodology
In this paper, the FOC method was applied to the hybrid motor model used for tracking purposes and
was connected with a new type of controller (PSD Fuzzy Controller) for the same purposes and park
transformation applied with feedback loops.
2.1. Modeling of PSD fuzzy controller
The PID Controller (2DOF) block generates an output signal based on the difference between a
reference signal and admeasured system output. Figure 2 illustrates PSD fuzzy controller.
The block computes a weighted difference signal for each of the proportional, integral, and
derivative actions according to the setpoint weights you specify. The block output is the sum of the
proportional, integral, and derivative actions on the respective difference signals, where each action
is weighted according to the gain parameters. A first-order pole filters the derivative action.
Controller gains are tunable either manually or automatically. Automatic tuning requires Simulink
Control Design software (PID)the sum of the proportional, integral, and derivative actions on the
respective difference signals, where each action is weighted according to the gain parameters. A first-
order pole filters the derivative action. Controller gains are tunable either manually or automatically.
Automatic tuning requires Simulink Control Design software (PID Tuner or SISO Design Tool).
Developing the Hybrid Stepper Motor Model for Tracking Purpose Using New Methodology
175

Figure 2. PSD fuzzy controller.
2.2. Apply FOC method on the model
The block represents the complete FOC. It is relatively simple and successful control strategies for
closed loop system it is used to control the torque speed, and position of the motor.
The blocks (theta, omega) are respectively the controllers obtained for the position and the speed
loops. Figure 3 shows the proposed system with FOC method.
Using current loop regulation can improve system rigid to speed up system response, and improve
the linearity of torque control, which can achieve constant system start-stop current [3], and
guarantee motor Current not to exceed the maximum allowable values.
+
-
PSD Fuzzy
Controller
Position
Regulation
Motor Current
Regulation
Circuit
Position
Regulation
Speed
Detecting
+
-
-
Figure 3. Proposed system with FOC Method. Figure 4. Variable Frequency Control.
Figure 4 shows the variable frequency control of AC synchronous motors in general [4].
2.3. Modeling of hybrid stepper motor drive
The mathematical model equations for a hybrid stepper motor are given below [5]. This is a
dynamical model with differential equations. Equation (1) and (2) are the electrical equations, (3)
and (4) are the mechanical equations of the hybrid stepper motor. The change in inductance, detent
torque and magnetic coupling between the phases are neglected in this model [6].
(1)
(2)
(3)
IWMCE 2018 - International Workshop on Materials, Chemistry and Engineering
176

(4)
Where
i
a
= the current in phase A
i
b
= the current in phase B
u
a
= the voltage in phase A
u
b
= the voltage in phase B
Ti = the load torque (Nm)
ω = rotor speed (rad/sec)
θ = rotor position (rad)
2.4. Modeling of traditional PID and feedback loop
The conventional proportional-integral-derivative (PID) controllers are used in immense control
actuation applications. The PID controller has the ability eliminate steady state error through integral
action as the output changes corresponding to controller derivative action with respect to input
command signal [7].In general the hybrid stepper motor controllers, but they are sensitive to
parameter variation and load disturbances [8]. K
p
, K
i
are controlled by PI, PID controller. K
p
and K
i
are proportional gain and the integral gain of current loop respectively, the current and voltage
commands ind-q reference frame are represented by using d-q or park transformation to simplify the
signal.
Apposition loop estimates the rotor position and speed information. The motor model uses
voltages and currents to estimate the position .the PMSM model is based on DC motor model.
In general control signals calculated for conventional PID gain parameters K
p
, K
i
, K
d
.
(5)
(6)
2.5. Modelling of reference signal and transformation
The Reference signal inputs shown in figure 5 consist of two signals. The first indication to unit step
which represents (start-stop) motion, and the second is direction signal which represents the motor
direction (clockwise, anti-clockwise).
Figure 5. Reference signal block diagram.
Developing the Hybrid Stepper Motor Model for Tracking Purpose Using New Methodology
177
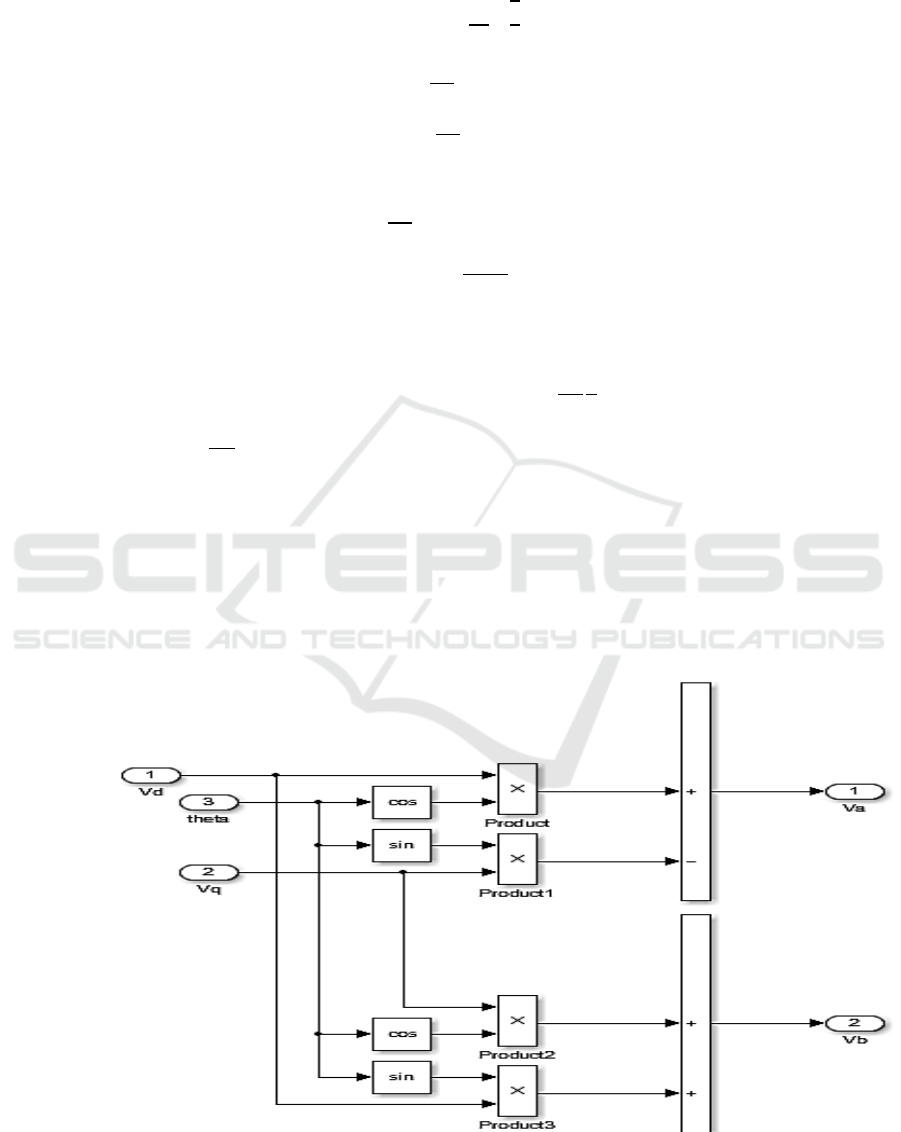
The current and voltage commands in d-q reference frame are represented by using d-q or park
transformation as shown in figure 6 to simplify the signal.
(7)
(8)
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
Figure 6. Park transformation.
IWMCE 2018 - International Workshop on Materials, Chemistry and Engineering
178

3. Results of simulation
The data given in table 1 for hybrid stepper motor is used in the simulation. While control rules for
FLC as shown in table 2. The comparisons of Experimental results have shown excellent results of
proposed fuzzy-PSD controller and are well demonstrated for uncertain nonlinear conditions. Various
kinds of popular control algorithm have been described for the controller design in our work have
been presented to show the effectiveness of proposed model and analysis.
The hybrid stepper motor is investigated on open loop control. This investigation includes the
study of the motor position, speed, and error shown in the figures.
Table 1. Hybrid stepper motor parameters.
Parameters
Values
Motor phase A resistance ()
Ra = 30
Motor phase A inductance (H)
La = 0.032
Motor phase B resistance ()
Rb = 30
Motor phase B inductance (H)
Lb = 32*10^-3
Machine torque constant (Nm/A)
KC = 0.5
Applied DC phase voltage (V)
Vs = 5
Friction coefficient (Nm S/rad)
B = 0.0026
Inertia constant (kgm2)
J = 4.6*10^-5
Number of rotor teeth
Nr = 50
The knowledge base defining the fuzzy rules are basic part of fuzzy controller that means make
decisions based on rules and defined as conditional statement in the form (if-then) statement. Fuzzy
control, which directly uses fuzzy rules is most important application in fuzzy theory. The control
rules are evaluated by inference mechanism and represented as (if-then) form [9].
Table 2. Control rules of FLC.
NB
NM
NS
ZO
PS
PM
PB
NB
PB
PB
PM
PS
PS
PS
ZO
NM
PB
PM
PM
PS
PS
ZO
NS
NS
PB
PM
PS
PS
ZO
NS
NM
ZO
PB
PM
PS
ZO
NS
NM
NB
PS
NM
NS
ZO
NS
NS
NM
NB
PM
NS
ZO
NM
NS
NS
NM
NB
PB
ZO
NS
NM
NM
NS
NM
NB
Modeling stepper motor and simulate it by MATLAB give us good results that can we see it in
curves. The three types of PID controller have minimum overshoot and steady state error.
Finally, the motor performance using (PSD FUZZY) controller is tested to verify the controller
capability to follow reference position. And the results are shown in figures 7 and 8. The error of the
system shown in figure 9 but actually it is related to motor starting signal form.
Developing the Hybrid Stepper Motor Model for Tracking Purpose Using New Methodology
179
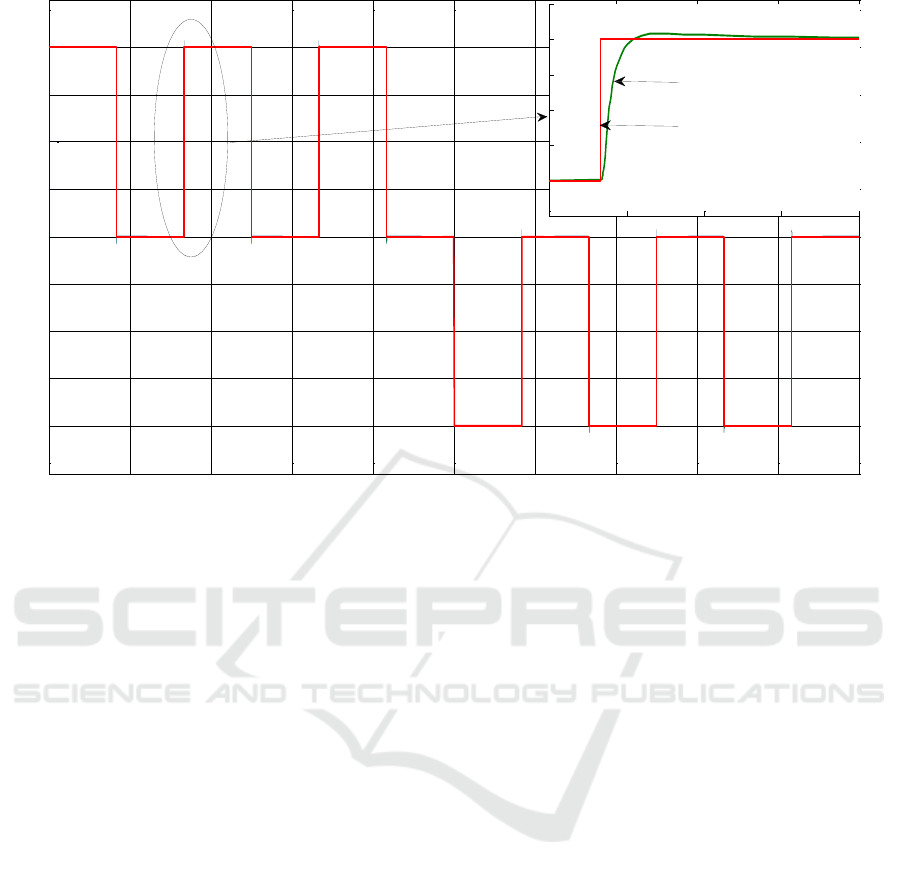
Figure 7. Speed Response Curve of Hybrid Stepper Motor.
For speed response result with inner loop current for both PSD fuzzy controller and traditional
PID controller performance good rise time with minimum overshoot see figure 7.
For motor position performance is carried out for the control system (see figure 8 shows the
position control equivalence with good response to track the reference signal.
For error curve see figure 9 shows the total error of the control system but it’s very similar to the
initial response of the motor and percentage error presented in table 3.
Table 3. Results of Position and Speed Transient Response.
Parameters
Position signal
Speed signal
Rise Time- Tr (ms)
0.0769
0.0001
Settling time- Ts (ms)
0.082
0.00025
Delay time- Td (ms)
0.04
0.00005
Transient Behavior
smooth
smooth
Maximum overshoot
2*10^-5
0.048
Peak time- Tp (ms)
0.08
0.0002
% error
0.01
0.001
Number of rotor teeth
smooth
0.0001
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
0.1666 0.1667 0.1668 0.1669 0.167
-0.5
0
0.5
1
1.5
2
2.5
acual speed
reference speed
IWMCE 2018 - International Workshop on Materials, Chemistry and Engineering
180
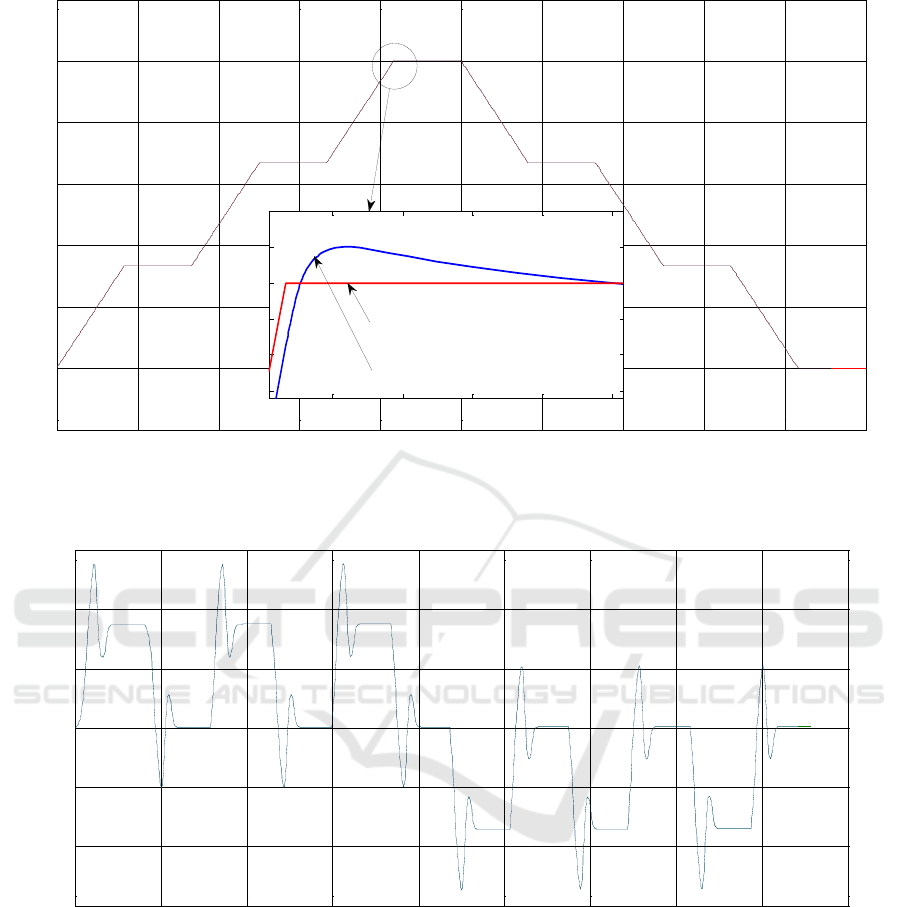
Figure 8. Motor Position Performance with Fuzzy PID Controller.
Figure 9. Overall Error of Control System.
4. Conclusions
Different computing technique including fuzzy logic and 2DOF PID (PSD fuzzy controller) applied
to improve the step response of hybrid stepper motors. The linear fuzzy controller algorithm has been
applied to linear fuzzy controller algorithms for closed loop controls of hybrid stepper motors have
been discussed.
Also in this work, we used a new type of controller to improve the performance of the stepper
motor the used to move mirror of laser. servo control structure for laser tracker as well as the control
algorithms of developed fuzzy PID to fuzzy PSD, which are of current speed, displacement and
position with four ring feedbacks + fuzzy correction) to perform intelligent control from model the
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-10
0
10
20
30
40
50
60
0.4167 0.4167 0.4168 0.4168 0.4169
49.997
49.998
49.999
50
50.001
50.002
acual position
reference position
0 200 400 600 800 1000 1200 1400 1600 1800
-3
-2
-1
0
1
2
3
x 10
-3
Time [sec]
Error
Developing the Hybrid Stepper Motor Model for Tracking Purpose Using New Methodology
181

PSD fuzzy controller produces better performance. Speed and position waveforms also agree well
with the theoretical prediction.
Acknowledgement
The authors would like to thank prof. Shi LIU head of the control department of the school of
electrical engineering at university of north china. also, the anonymous reviewers for their careful
reading of this paper and for their helpful comments.
References
[1] Abdalazizsadehsalous W 2013 Comparison between PID and Fuzzy logic control in the
position of stepper motors, European Journal of Scientific Research, ISSN 1450-216X /
1450-202X Vol. 101 No 1 May pp.69-76
[2] Rusu C, Birous I and Szoke E 2008 Model based design controller for the stepper motor IEEE
[3] Qing Y J and et al 2017 Precision laser tracking servo control system for moving target
position measurement, Optik 131 pp.994–1002
[4] Asok A and Mathew D 2014 A Novel method of using Direct Torque control in bipolar
stepper motor, International Journal of Scientific & Engineering Research, Volume 5, Issue
12, December-ISSN 2229-5518
[5] WAKEEL A S and Sarhan A A 2014 Step response enhancement of hybrid stepper motors
using soft computing techniques, J. Intelligent Systems and Applications 06, 21-28
[6] Mary N and Francis T J 2015 Modeling and simulation of hybrid stepper motor in micro
stepping mode, International journal of advanced technology in engineering and science vol.
No., Issue 09, September pp.31-35
[7] Muniraj M and R Arulmozhiyal 2015 Modeling and simulation of control actuation system
with fuzzy PID logic controlled brushless Motor Drives for Missiles Glider application,
Scientific World Journal Volume, Article ID 723298, 11 pages.
[8] Venkateswarlu and Kavitha T Position control of hybrid stepper motor by model based
damping algorithm, International Journal of Computer Science information and Engg.,
Technologies ISSN 2277-4408 || 01082014-026
[9] Mohammed B, Mohammed and El-Moghany S 2013 Fuzzy controller design using FPGA for
sun tracking in solar Array system, International Journal of Modeling and Optimization,
Vol. 3, No. 2, April, pp.189-197
IWMCE 2018 - International Workshop on Materials, Chemistry and Engineering
182
