
ORB-SLAM based ICP and Optical Flow Combination Registration
Algorithm in 3D Dense Reconstruction
Liya Duan
1
, Renxia Wu
2
, Xin Wang
1
, Yinghe Liu
3
, Yongjie Ma
1
and Hui Fang
2
1
Institute of Oceanographic Instrumentation, Qilu Univercity of Technology (Shandong Academy of Sciences), No.37
Miaoling Road, Qingdao, China
2
Institute of Coastal and Offshore Engineering, School of Engineering, Ocean University of China,
N
o. 238 Songling Road,
Qingdao, China
3
Institute of Oceanology, Chinese Academy of Sciences, No.7 Nanhai Road, Qingdao, China
Keywords: ICP, Optical Flow, ORB-SLAM, 3D Reconstruction .
Abstract: Dense 3D reconstruction is important for applications in many fields. The existing depth information based
methods are typically constrained in their effective camera-object distance that should be from 0.4m to 4m.
We present a combination of optical flow method and ICP method, and fuse this method and RGB-D
camera ORB-SLAM to make full use of the color and depth data and refine the registration results that can
achieve a more accurate dense 3D reconstruction. The experiment shows that this combination method is
effective for the dense map acquisition.
1 INTRODUCTION
Registration Algorithm is of importance in dense 3D
reconstruction with many applications in object
recognition (Hong, 2015), object retrieval (Lu, 2014),
scene under-standing (Ala, 2014), object tracking
(Kim, 2014), autonomous navigation (Valiente,
2014), human–computer interaction (Sun, 2015),
telepresence, tele- surgery, reverse engineering,
virtual maintenance and visualization (Galvez, 2012).
Simultaneous Localization and Mapping (SLAM)
has been a hot research topic in the last two decades,
and has recently attracted the attention of the
researchers in computer vision related area. The
ORB-SLAM is built on the main ideas of PTAM,
the loop detection work of G´alvez-L´opez and
Tard´os (Hong, 2015), the scale-aware loop closing
method of Strasdat et. al (Strasdat, 2010) and their
idea of a local covisible map for large scale
operation (Strasdat, 2011), which is a new
Monocular SLAM system that overcomes the
limitations of PTAM. The ORB-SLAM can be
performed by using just a monocular camera, but the
scale of the map and estimated trajectory is
unknown because of the unknown depth that is not
observable from just one camera. Moreover, the
ORB-SLAM needs to produce an initial map, as it
cannot be triangulated from the very first frame. The
monocular ORB-SLAM suffers from scale drift and
may fail if performing pure rotations in exploration,
so researchers try to use RGB-D cameras to provide
the depth information to solve the above problems.
KinectFusion applies the RGB-D camera to fuse all
depth data from the sensor into a volumetric dense
model and track the camera pose by using ICP.
While the effective range of the depth data detected
by Kinect is 0.4m~3.5m, the depth information of
the Kinect camera is inaccurate when the surface of
the scene is less than 0.4m, which makes the input
point cloud of the ICP algorithm low accuracy and
eventually leads to the inaccuracy of the matching
result. When the geometric information of the scene
is less and the point cloud is too smooth, the ICP
algorithm is difficult to converge, the accuracy of
the algorithm is reduced, the position and posture of
the camera can not be correctly calculated, which
cause the situation of "losing frame". Therefore, this
system was limited to small workspaces. Recently,
the ORB-SLAM2 provides a real-time SLAM
library for Stereo and RGB-D cameras that
computes the camera trajectory and a sparse 3D
reconstruction with true scale to give us alternative
ways. The optical flow method use the
correspondence of the three-dimensional point and
the two-dimensional pixel point of the image and

tracks the two-dimensional pixels of the image
through the light stream to obtain the outer
parameters and track the camera.
In this paper, a combination of optical flow
method and ICP is proposed. We use the ICP
algorithm to reconstruct the scene and initialize the
3D point coordinates by the ICP algorithm, and then
the optical flow method is used to track the location
camera. When the camera tracking fails, the ICP
based "lost frame retrieval" method is used to
rematch. We also fuse this method and RGB-D
camera ORB-SLAM to make full use of the color
and depth data and refine the registration results.
2 TRACKING METHODS
2.1 ORB-SLAM2
KinectFusion of Newcombe et al. (Hong, 2015),
fusing all depth data from the RGBD camera into a
volumetric dense model that is used to track the
camera pose using ICP, was limited to small
workspaces due to its volumetric representation and
the lack of loop closing. ORB-SLAM2 (Ra´ul, 2017)
uses depth information to synthesize a stereo
coordinate for extracted features on the image, so
that the system is suitable for the input being stereo
or RGB-D. This system does not need a specific
structure from motion initialization as in the
monocular case, because it can get the depth
information from just one frame with the RGB-D
cameras. The system operations are based on these
features extracted from the input frame, so that the
system can run whether the input image is from the
stereo camera or RGB-D camera. For RGB-D
cameras, the system extract ORB features on the
RGB image and the system uses the same ORB
features for tracking, mapping and place recognition
tasks. The back end of ORB-SLAM2 is based on
bundle adjustment and builds a globally consistent
sparse reconstruction.
The goal of ORB-SLAM2 is long-term and
globally consistent localization instead of building
the most detailed dense reconstruction. Therefore,
we fuse ICP Algorithm and optical flow method to
present a method based on the RGB-D camera ORB-
SLAM to get the dense map.
2.2 ICP Algorithm
ICP algorithm is a common algorithm for point
cloud matching. The algorithm obtains the point
cloud matching relationship in two coordinate
systems, that is, the transformation relation of the
two coordinate systems is obtained. It is necessary to
find a suitable rotation matrix and the translation
vector, so that the two input point clouds P and X
can match (Wen, 2015), that is, to find the least
square approximation coordinate transformation
matrix of the two point cloud P and X. The rotation
and translation matrix can be computed by
quaternions. Set a rotation transformation vector as
a unit quaternions
R
q
=
0123
,,,
T
qqqq
,
where
0
2
q
+
2
1
q
+
2
2
q
+
3
2
q
=1, and obtain rotation
matrix R, set translation transformation vector as
T
q
=
456
,,
T
qqq
, and obtain coordinate
transformation vector
q =
|
T
RT
qq
, then, The
problem of finding the best transformation vector for
the corresponding point set can be converted to the
minimization of the (1) formula.
2
1
1
() || ( ) ||
P
N
iRiT
i
P
f
qxRqPq
N
(1)
2.3 The Optical Flow Method
The optical flow represents the change of the image,
and it contains the information of the target
movement, so we can use it to determine the motion
of the target.
The basic premise of the optical flow method is
as follows (Meister, 2012):
1. The luminosity is constant. The luminance of
the same point will not change as time changes. This
is the assumption of the basic optical flow method
(all optical flow related method must be satisfied)
for obtaining the basic equations of the optical flow
method.
2. Small movements. The position changes are
small as time changes, so that the grey level can get
the partial derivative of the position. In other words,
in the case of small movement, we can use the grey
change caused by the change of the unit position
between the front and back frames to approximate
the partial derivative of the grey level to the position
level, which is also an indispensable assumption of
the optical flow method.
3. Uniform space. The adjacent points in a scene
are adjacent points when projected onto the image,
and adjacent points have uniform speed.

3 THE COMBAINATION
METHOD
3.1 Advantages of Optical Flow Method
and ICP Combination Algorithm
The optical flow method relies on the color image to
calculate the feature points, and the coordinates of
the 3D points corresponding to the 2D pixels of the
initial image are required for the subsequent
matching. Therefore, the optical flow method is
sensitive to light and requires constant illumination.
The ICP algorithm is to obtain the transformation
relationship between the point cloud from the depth
map and the 3D point cloud of the reconstruction
scene. The matching process of the ICP method uses
the depth data, and the depth map does not rely on
the constant light. The ICP algorithm has a high
accuracy, however, the precision of the initial depth
map obtained by RGB-D camera is limited, and its
effective range is 0.4m~3m, which is inaccurate
when the depth is near or less than 0.4m, resulting in
the inaccurate matching result of the current point
cloud. In the more complex scene, the more obvious
the characteristics of point cloud and the better the
matching effect of the ICP point cloud matching
algorithm is. In the smooth scenes, the matching
point clouds are smoother, the ICP algorithm is
difficult to converge, and the accuracy of the
matching result is low. When the matching is
inaccurate, we can see that even if the camera is
fixed, the two-dimensional image after projection
obviously shakes. Within the effective distance of
RGB-D camera, the accuracy and stability of ICP
algorithm are relatively high. By recording the
matched information, it rematches more quickly
when the camera tracking and localization fail. In
general, the optical flow method and the ICP
algorithm have their own advantages and
disadvantages. In the augmented reality system, the
ICP algorithm can be used to reconstruct the scene,
and initialize to get the 3D point coordinates, and
then the optical flow method is used to track and
locate the camera. When the camera tracking fails,
the "lost frame retrieval" mechanism based on the
ICP algorithm is used to rematch. The combination
of optical flow method and ICP algorithm can make
use of depth data and color data more effectively.
3.2 The Combination Algorithm Flow
The OpenCV library function is used in the optical
flow method. Image corner detection is processed at
the beginning of the algorithm and the 3D point
coordinates corresponding to the two-dimensional
pixels are found by using the ray casting algorithm.
The ray casting algorithm requires the camera
external reference. We apply the position
relationship of the two cameras of Kinect and the
relationship between the two cameras and the world
coordinate system to obtain the conversion
relationship between the color camera coordinate
system and the depth camera coordinate system.
Thus, the depth camera external parameters are
converted to the color camera external reference,
and the ray casting algorithm is used to calculate the
three-dimensional point coordinate corresponding to
a color pixel.
The Ransac process is the process of selecting
more accurate matching points from 2D points and
3D points. When the camera tracking fails, it is
necessary to use the ICP algorithm to retrieve the
correct camera pose. After the camera reaches
steady state, the optical flow method can be used
again to convert to the tracking process.
The flow chart of our method is shown in
Figure1. The upper part is the pose estimation in the
tracking process. The lower part shows the whole
3D reconstruction based on the ORB-SLAM. The
pose estimation is the combination of the ICP and
the optical flow, which makes full use of the color
images and the depth maps to get an more accurate
dense reconstruction.
4 EXPERIMENT
After the optical flow tracking the characteristic
points, the PnP Method is used to solve the pose.
When the position and posture satisfies the condition
(two thresholds we set), the 3D points of the last
frame are projected to the current frame. We have
run the combination algorithm proposed in this
paper in an Intel Core i7-6700HQ desktop computer
with 8GB RAM, and evaluated the proposed
algorithms on the TUM RGB-D benchmark (Sturm,
2012). In the experiment, we draw the feature points
(corners) tracked by the optical flow and the re-
projected feature points (re-projected corners)
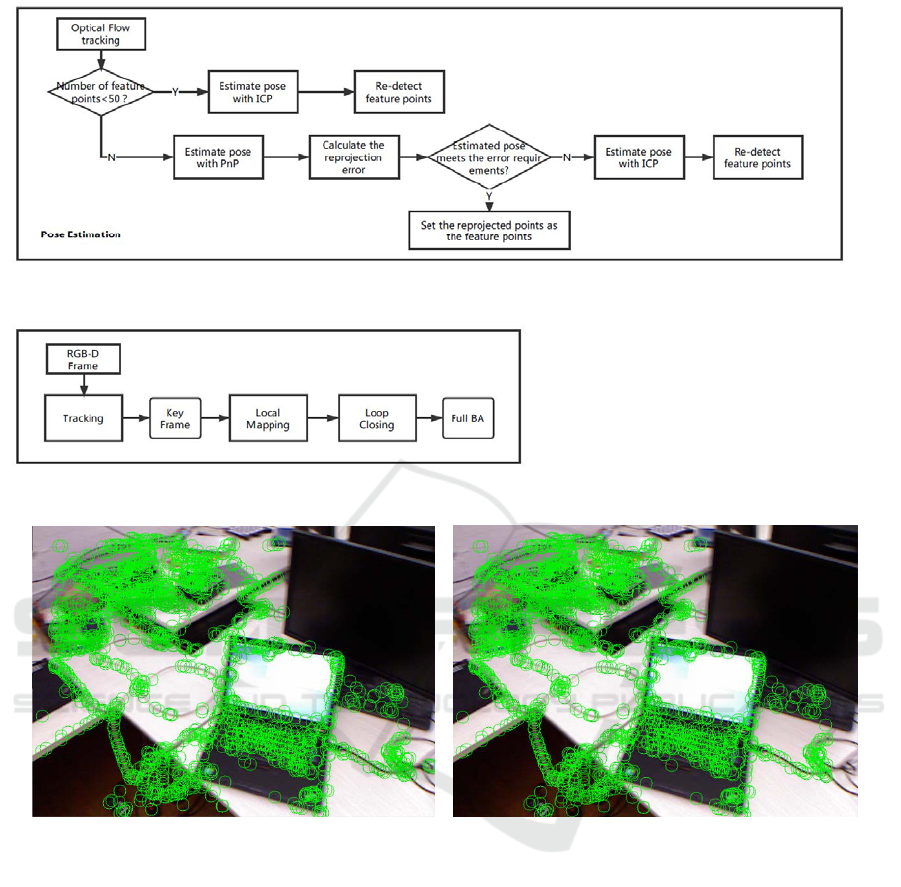
Figure1: Flow chart of the proposed combination algorithm.
Figure 2: Feature points (left) tracked by the optical flow and the re-projected feature points (right).
respectively. The re-projection is that the 3D points
of the last frame are projected again onto the pixel
plane, and the calculation process does not involve
the points detected from the current frame.
Therefore, if the feature points (corners) and the re-
projected feature points (re-projected corners) are
overlapped, it shows that the pose calculation is
good. From Figure2, the re-projection points are
basically consistent with the tracked feature points,
which indicates that the pose estimation is accurate.
5 CONCLUSIONS
In this paper, we proposed an efficient ORB-
SLAM2 based registration algorithm for 3D dense
reconstruction, combining the optical flow method
and ICP. We use the ICP algorithm to reconstruct
the scene and initialize the 3D point coordinates by
the ICP algorithm, and then the optical flow method
is used to track the location camera. When the
camera tracking fails, we use the ICP based "lost
frame retrieval" method to rematch. We also fuse
this method and RGB-D camera ORB-SLAM to
make full use of the color and depth data and refine
the registration results. This improved ORB-SLAM
based method can reconstruct dense map for
practical applications. In the future research, we will
add more efficient filter to reduce the point cloud
repetition rate to get more accurate 3D
reconstruction.

ACKNOWLEDGMENTS
This research is supported by the National Natural
Science Foundation of China (NSFC) under Grant
No. 61702308 and No. 51504146.
REFERENCES
1. Galvez, A., Iglesias, A., Particles warm optimization
for non-uniform rational B- spline surface
reconstruction from clouds of 3D data points, Inf.
Sci.192(2012) 174–192,
http://dx.doi.org/10.1016/j.ins.2010.11.007.
2. Hong, C., Yu, J., You, J., Chen, X., Tao, D., Multi-
view ensemble manifold reg- ularization for 3D object
recognition, Information Sciences, doi: 10.1016/j.
ins.2015.03.032.
3. Catuhe , D., Programming with the Kinect for
Windows Software Development Kit, Microsoft Press,
United States, 2012.
4. Valiente,D., Gil,A., Fernández,L., Reinoso,Ó.,
A modified stochastic gradient descent algorithm for
view-based SLAM using omni direction
alimages ,Inf.Sci. 279(2014)326–337,
http://dx.doi.org/10.1016/j.ins.2014.03.122.
5. Kim , D.Y., Jeon , M., Data fusion of radar and
image measurements for multi- object tracking via
Kalman filtering, Inf.Sci.278(2014)641–652,
http://dx.doi. org/10.1016/j.ins.2014.03.080.
6. Lu,K., Wang,Q., Xue,J., Pan,W., 3D model
retrieval and classification by semi- supervised
learning with content-based
similarity,Inf.Sci.281(2014) 703–713,
http://dx.doi.org/10.1016/j.ins.2014.03.079.
7. Sun , L., Liu , Z., Sun , M.-T., Real time gaze
estimation with a consumer depth camera, Information
Sciences, doi: 10.1016/j.ins.2015.02.004.
8. Ala,R., Kim,D.H., Shin,S.Y., Kim,C., Park,
S.-K.,A 3D-graspsynthesisalgorithmto grasp unknown
objects based on graspable boundary and convex
segments, Inf. Sci. 295(2015)91–106,
http://dx.doi.org/10.1016/j.ins.2014.09.062.
9. G´alvez-L´opez,D. and Tard´os,
J. D., “Bags of
binary words for fast place recognition in image
sequences,” IEEE Transactions on Robotics,vol. 28,
no. 5, pp. 1188–1197, 2012.
10. Strasdat,H., Montiel,J. M. M., and Davison,A. J.,
“Scale drift-aware large scale monocular SLAM.” in
Robotics: Science and Systems (RSS),Zaragoza, Spain,
June 2010.
11. Strasdat, H., Davison, A. J., Montiel, J. M. M.,
andKonolige, K.,“Double window optimisation for
constant time visual SLAM,” in IEEE International
Conference on Computer Vision (ICCV), Barcelona,
Spain,November 2011, pp. 2352–2359.
12. Ra´ul M. A., Tard´os J. D., ORB-SLAM2: an Open-
Source SLAM System for Monocular, Stereo and
RGB-D Cameras, IEEE Transactions on Robotics,
33(5) pp.1255-1262.
13. Wen, Y. J., Hsu, C. C., Wang, W. Y.. Map building of
uncertain environment based on iterative closest point
algorithm on the cloud. In: Proceedings of IEEE
International Conference on Mechatronics. Nagoya:
IEEE, 2015: 188 ~ 190
14. Meister, S., Izadi, S., Kohli, P., Hmmerle, M.,
Rother, C., Kondermann, D., When Can We Use
KinectFusion for Ground Truth Acquisition , In
Workshop on Color-Depth Camera Fusion in
Robotics , IEEE International Conference on
Intelligent Robots and Systems,2012.
15. Sturm, J., Engelhard, N., Endres, F., Burgard, W.,
Cremers, D., A benchmark for the evaluation of rgb-d
slam systems. In Intelligent Robots and Systems
(IROS), IEEE/RSJ Int. Conf. on, 2012: 573–580.
