
dSPACE Implementation of Improved Indirect Field-oriented
Control of Asynchronous Motor using Adaptive Fuzzy Proportional
Integral Controller for Electric Vehicle Applications
Chaymae Laoufi
1
, Ahmed Abbou
2
, Mohammed Akherraz
3
and Zouhair Sadoune
4
Electrical Engineering Department, Mohammed V University, the Mohammadia School of Engineers, Rabat, Morocco
4
Department of Physics, Faculty of Science, Ibn Tofail University, Kenitra, Morocco
abbou@emi.ac.ma,
akherraz@emi.ac.ma
sadoune.zouhair@gmail.com
Keywords: Indirect Field-Oriented Control; Adaptive Fuzzy Proportional Integral Controller; Adaptive Gains;
Conventional Proportional Integral Controller
.
Abstract:
This paper deals with the Indirect Rotor Field-Oriented Control of asynchronous motor whose speed
is controlled by an a
daptive fuzzy proportional integral controller. This motor drive is used to propel
an electric vehicle. The design and the experimental implementation of the
Adaptive Fuzzy
Proportional Integral Controller
are presented. This controller is proposed as a solution to compensate
for the effect of the variation of the machine parameters and the external conditions. The
characteristic of this controller is its capacity to adapt in real time its gains in order to reject the
machine parameter disturbances. A series of experimental tests were performed to test the
performance the improved drive using the proposed controller. Simulation and Experimental
results showed the high-speed tracking and the rejection disturbance capacity of the adaptive fuzzy
proportional integral controller.
This paper presents the design and the experimental implementation of the adaptive fuzzy proportional integral
controller applied to the indirect field oriented control of asynchronous motor used to
propel the electric vehicle. This intelligent controller is proposed to reduce the impact of the
variation of the machine parameters and the external conditions on the performances of the drive,
and so, to improve the performances of the electric vehicle control. The experimental
implementation was carried out using dSPACE system and the experimental results showed the
high-speed tracking and the rejection disturbance capacity of the adaptive fuzzy proportional
integral controller compared to the conventional proportional integral controller.
1 INTRODUCTION
Limitations on the emission of greenhouse gases and
the traffic restrictions in the urban areas imposed by
the environmental protection requirements have
given a strong impulse toward the development of
electrical propulsion systems for electric vehicles.
The robustness, the high power-to-weight ratio, the
low cost and the ease of maintenance make the use of
the asynchronous motor advantageous in a propulsion
chain of an electric vehicle.
High efficient drives are indispensable in automotive
applications. The indirect field-oriented control
(IFOC) is an established strategy for high dynamic
performance induction motor drives.
Laoufi, C., Abbou, A., Akherraz, M. and Sadoune, Z.
dSPACE Implementation of Improved Indirect Field-Oriented Control of Asynchronous Motor using Adaptive Fuzzy Proportional Integral Controller for Electric Vehicle Applications.
DOI: 10.5220/0009775601370144
In Proceedings of the 1st International Conference of Computer Science and Renewable Energies (ICCSRE 2018), pages 137-144
ISBN: 978-989-758-431-2
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
137
Its characteristic is the decoupling of the torque and
the flux and hence the fast torque response. This
command was proposed by Blaschke and Hasse in
early 1970s. Since then, great efforts have been made
to improve the performance and the robustness of this
drive (Abbou , et al, 2009) (Bennassar , et .al 2013).
The proportional integral (PI) controller is the
conventional controller used in said command.
However, the linearity, the sensitivity to the variation
of the machine parameters and the incapacity to
control the nonlinear systems are major weaknesses
of this controller (Khuntia, et .al, 2009),( Singh, G , et
.al 2014).
The adaptive fuzzy proportional integral controller
has been developed to correct these problems. Its
ability to adjust its gains when a disturbance of the
machine parameters occurred makes it the most
recommended controller to deal with systems subject
to disturbances (M.Masiala; et.al, 2006), ( Chebre,
et.al; 2007).
In this paper, we present the model and the
experimental implementation of the indirect rotor
field-oriented control using both the adaptive fuzzy
proportional integral controller and the conventional
proportional integral (PI) controller. Experimental
results are presented to highlight the improved
performances of the drive obtained by using the
adaptive fuzzy proportional integral controller in
comparison with the conventional PI controller.
2 INDIRECT ROTOR FIELD-
ORIENTED CONTROL
The principle of the field oriented control (FOC) is
based on the separate control of the torque and the
flux in similarity to the DC machine with separate
excitation. The algorithm of the indirect rotor field-
oriented control (IRFOC) is based on the orientation
of the rotor flux Φ
r
on the direct axis of the rotating
reference frame.
This implies (Abbou, et.al, 2009):
Φ
Φ
and Φ
0 (1)
By applying this principle, the expressions of the
rotor flux and the torque are given by the following
equations:
If Φ
is constant [3]:
Φ
Mi
(2)
C
p
Φ
i
(3)
These equations show that decoupling between the
flux and the torque is ensured. In fact, the magnitude
of the rotor flux Φ
r
is determined only by the direct
component of the stator current i
sd
while the
electromagnetic torque C
em
is determined by the
quadrature component of the stator current i
sq
.
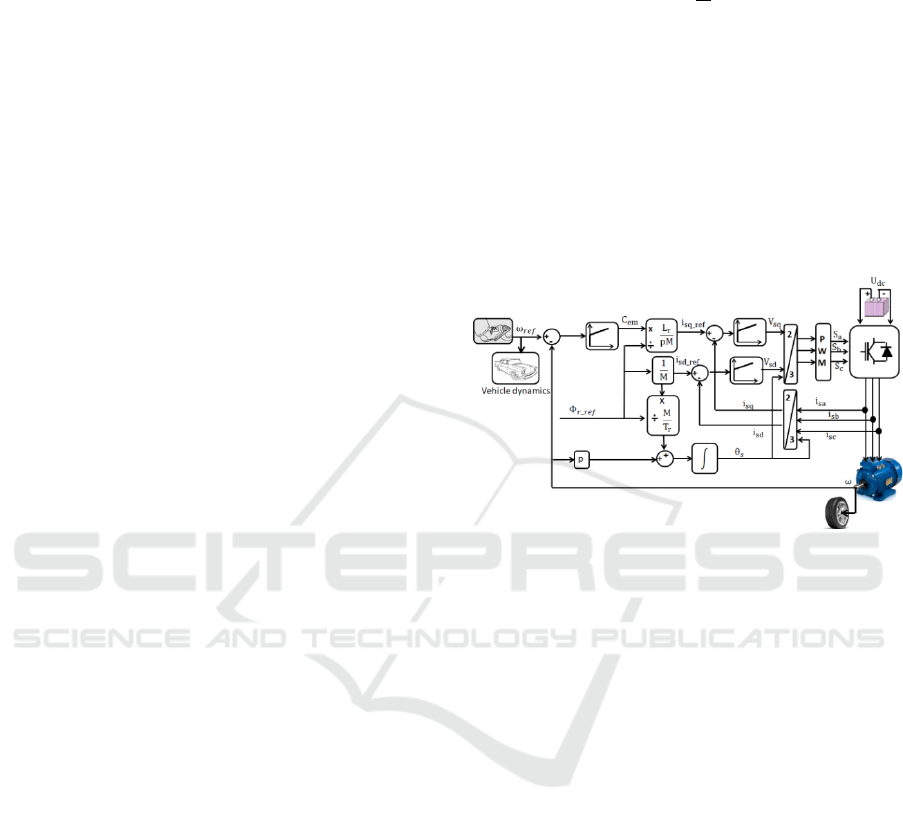
The block diagram of speed regulation by the indirect
rotor field oriented control of an induction motor
intended for a propulsion chain of an electric vehicle
is presented by the Figure1.
Figure 1: Structure of IRFOC used in a propulsion chain of
an electric vehicle.
3 ADAPTIVE FUZZY
PROPORTIONAL INTEGRAL
CONTROLLER
The adaptive fuzzy proportional integral controller is
a hybrid controller including a conventional
proportional integral (PI) controller and a fuzzy logic
regulator. This controller is developed with the aim of
ensuring a robustness with respect to the variation of
the machine parameters and the experimental
conditions by tuning in real time the gains of the
conventional PI controller via a fuzzy logic regulator.
As shown by its architecture (Figure 2), the fuzzy
logic controller compares the measured rotor speed
with the desired speed and generates the adaptive
factors ∆K
and ∆K
. These are used to calculate the
new gains of the conventional PI controller according
to the following algorithm:
Kp
i 1 Kp
i ΔKpi (4)
Ki
i 1 Ki
i ΔKii (5)
ICCSRE 2018 - International Conference of Computer Science and Renewable Energies
138

Figure 2: Design of adaptive fuzzy proportional integral
controller.
The structure of the fuzzy logic regulator is
determined as follows:
The input variables; the speed error (e
ω
) and its
derivative (
); are described by the following
linguistic variables:
HN : High Negative
AN : Average Negative
LN : Low Negative
Z : Zero
LP : Low Positive
AP : Average Positive
HP : High Positive
The output variables; ∆K
and ∆K
; are described
by:
H : High
L : Low
The membership functions for input and output
variables are defined in the interval [-0.1 0.1] as
follows: (Laoufi , et.al, 2013), (Laoufi , et.al, 2014):
Figure 3. Membership functions for input variables
Figure 4. Membership functions for output variables
The adaptive factors; ∆K
and ∆K
; are calculated by
the bases rules described in Tables 1 and 2.
Table 1: Matrix inference used to control the output
variable ΔK
p
HN AN LN Z LP AP HP
HN H H H H H H H
AN L H H H H H H
LN L L H H H L L
Z L L L H L L L
LP L L H H H L L
AP L H H H H H L
HP H H H H H H H
dSPACE Implementation of Improved Indirect Field-Oriented Control of Asynchronous Motor using Adaptive Fuzzy Proportional Integral
Controller for Electric Vehicle Applications
139
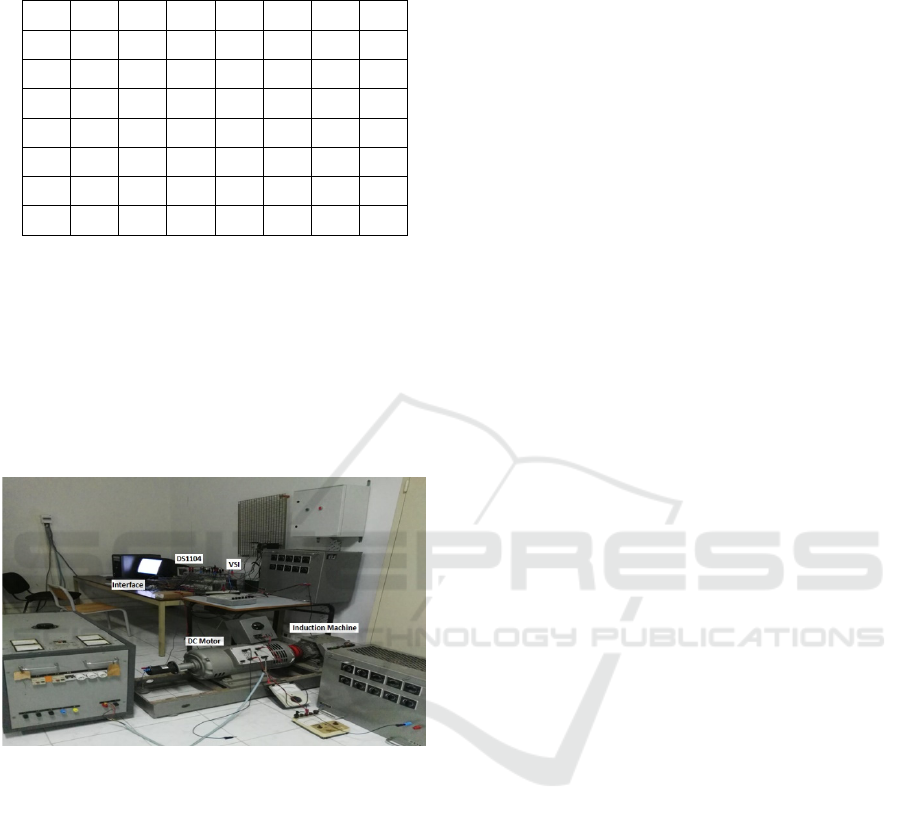
Table 2: Matrix inference used to control the output
variable ΔKi
HN AN LN Z LP AP HP
HN H H H H H H H
AN H H L L L H H
LN H H H L H H H
Z H H H L H H H
LP H H H L H H H
AP H H L L L H H
HP H H H H H H L
4 EXPERIMENTAL RESULTS
AND ANALYSIS
The experimental setup used to implement in real
time the proposed adaptive fuzzy proportional
integral controller applied to the indirect rotor field-
oriented control is shown in Figure 5:
Figure 5. The used test bench
The main components of the used test bench are:
The squirrel asynchronous motor of 3 KW
power, characterized by the nominal values of
the current, voltage and speed: 7.2A/12.5A,
220V/380V and 1400rpm;
The two-level voltage inverter type
SEMIKRON;
The dSPACE acquisition card (DS1104)
comprising a Real-Time Interface (RTI),
which is the link between the
dSPACE hardware and the development
software MATLAB/Simulink/Stateflow from
MathWorks.
The adaptation card developed to ensure the
compatibility of the dSPACE I/O board with the
inverter and the induction machine.
The DC motor used to apply a resistive torque.
In order to examine the performance of the adaptive
fuzzy proportional integral controller, a series of
measurement has been accomplished. In the first test,
a step change of 100 rad/s has been applied to the
speed reference. The second test consist to test the
performance of the proposed control in the nominal
reference speed (146 rad/s:1400 rpm). The third and
fourth tests aim to investigate the efficiency of the
proposed controller to reject the perturbation. So, a
resistive torque of 10 N.m has been applied as a
disturbance. In the fifth and sixth tests; and in order
to evaluate the robustness of the control to the change
of direction of rotation of the machine; the speed has
been changed between 100 rad/s and -100 rad/s and
between 10 rad/s and -10 rad/s.
The figures 6 and 7 show the precise speed tracking
and the better stator current signal when using the
adaptive fuzzy proportional integral controller with
less ripples. As shown in figure 7, by the use of the
adaptive fuzzy proportional integral controller, the
current remains a periodic sinusoidal signal. In fact,
from the frequency spectrum of the stator current
(Figures 11), the adaptive fuzzy proportional integral
controller gives a reduced THD (27.35%) compared
to the conventional PI controller (THD=29.98%).
The feature of the adaptive fuzzy proportional
integral controller is its capacity to reject the
disturbances. In fact, unlike the conventional PI
controller, the effect of the perturbation (resistive
torque) is not observed on the speed response of the
indirect rotor field oriented control using the adaptive
fuzzy proportional integral controller (Figure 12 to
15).
Also, the adaptive fuzzy proportional integral
controller gives a fast speed response to the change of
the rotational direction and a good dynamic behavior
even at low speed (Figure 16 and 17). This high
performance of this controller is due to its adaptive
gains which adapt in real time to compensate the
parameter variation as shown in Figure 18.
ICCSRE 2018 - International Conference of Computer Science and Renewable Energies
140

Figure 6. (a) Speed response of IRFOC using the
adaptive fuzzy proportional integral controller;
(b) the conventional PI controller.
Figure 7. (a) Measured stator current of asynchronous
motor controller by IRFOC using the adaptive fuzzy
proportional integral controller; (b) the conventional
PI controller
Figure 8. (a) Speed response of IRFOC using the
adaptive fuzzy proportional integral controller;
(b) the conventional PI controller (case of the
nominal reference speed).
Figure 9. (a) Measured stator current of asynchronous
motor controller by IRFOC using the adaptive fuzzy
proportional integral controller; (b) the conventional
PI controller (case of the nominal reference speed).
dSPACE Implementation of Improved Indirect Field-Oriented Control of Asynchronous Motor using Adaptive Fuzzy Proportional Integral
Controller for Electric Vehicle Applications
141

Figure 10. (a) Measured phase voltage of
asynchronous motor controller by IRFOC using the
adaptive fuzzy proportional integral controller; (b)
the conventional PI controller (case of the nominal
reference speed).
Figure 11. (a) Frequency spectrum of the measured
stator current in the case of using the adaptive fuzzy
proportional integral controller; (b) the conventional
PI controller
5 CONCLUSION
Figure 12. (a) Speed response of IRFOC using the
adaptive fuzzy proportional integral controller;
(b) the conventional PI controller; in the case of
applying a resistive torque.
ICCSRE 2018 - International Conference of Computer Science and Renewable Energies
142

Figure 13. (a) Measured stator current of asynchronous
motor controlled by IRFOC using the adaptive fuzzy
proportional integral controller; (b) the conventional PI
controller; in the case of applying a resistive torque.
Figure 14. (a) Speed response of IRFOC using the adaptive
fuzzy proportional integral controller ; (b) the
conventional PI controller; in the case of applying a
resistive torque in a given time interval.
Figure 15. (a) Measured stator current of asynchronous
motor controller by IRFOC using the adaptive fuzzy
proportional integral controller; (b) the conventional PI
controller; in the case of applying a resistive torque in a
given time interval.
Figure 16. (a) Speed response of IRFOC using the adaptive
fuzzy proportional integral controller; (b) the conventional
PI controller; in the case of changing the direction of
rotation of the machine (high speeds).
dSPACE Implementation of Improved Indirect Field-Oriented Control of Asynchronous Motor using Adaptive Fuzzy Proportional Integral
Controller for Electric Vehicle Applications
143

Figure 17. (a) Speed response of IRFOC using the adaptive
fuzzy proportional integral controller; (b) the conventional
PI controller; in the case of changing the direction of
rotation of the machine (low speeds).
Figure 18. Adaptive gains of the adaptive fuzzy
proportional integral controller K
P
(a), K
I
(b)
5 CONCLUSION
In this paper, the authors propose an intelligent
controller, the adaptive fuzzy proportional integral
controller, to improve the performance of an indirect
rotor field oriented control for induction motor used
in a propulsion chain of an electric vehicle. This drive
has been implemented in real time using dSPACE
Package and the experimental results were
satisfactory. The proposed controller presents a high
performance of speed tracking even in low speeds and
a high capacity to reject the disturbance of the
induction machine parameters.
REFERENCES
Abbou, A., Mahmoudi, H., 2009. Real Time
Implementation of a Sensorless Speed Control of
Induction Motor using DTFC Strategy. In Proceedings
of the IEEE International Conference on Multimedia
Computing and Systems, ICMCS '09.
Bennassar, A., Abbou, A., Akherraz, M., 2013. Speed
sensorless indirect field oriented control of induction
motor using an extended Kalman filter. In Journal of
Electrical Engineering.
Khuntia, S.R., Mohanty, K.B., Panda, S., Ardil, C., 2009. A
Comparative Study of P-I, I-P, Fuzzy and Neuro-Fuzzy
Controllers for Speed Control of DC Motor Drive. In
International Journal of Electrical Systems Science and
Engineering.
Singh, G., 2014. A fuzzy pre-compensated-PI controller for
indirect field oriented controlled induction motor drive.
In Innovative Applications of Computational
Intelligence on Power, Energy and Controls with their
impact on Humanity. (CIPECH).
Masiala, M., Knight, A., 2006. Self-tuning speed controller
of indirect field-oriented induction machine drives. In
Proceedings of 17
th
International Conference on
Electrical Machines.
Chebre, M., Zerikat, M., Bendaha, Y., 2007. Adaptation des
paramètres d’un contrôleur PI par un FLC appliqué à un
moteur asynchrone. In Proceedings of the 4
th
International Conference on Computer Integrated
Manufacturing, CIP’2007.
Abbou, A., 2009. Contribution à l’étude et à la réalisation
des stratégies de commande d’un moteur à induction
sans capteur de vitesse-simulations et expérimentation.
Ph.D. dissertation, Dept. Elect. Eng., Ecole
Mohammadia d’Ingénieur, Rabat, Morocco.
Laoufi, C., Abbou, A., Sayouti, Y., Akherraz, M., 2013.
Self tuning fuzzy logic speed controller for
performance improvement of an indirect field-oriented
control of induction machine. In International Review
of Automatic Control.
Laoufi, C., Abbou, A., Akherraz M., 2014. Comparative
study between several strategies speed controllers in an
indirect field-oriented control of an induction machine
In Renewable and Sustainable Energy Conference,
IRSEC’14.
ICCSRE 2018 - International Conference of Computer Science and Renewable Energies
144
