
The Sloshing Test of the Bilobe Tank Type Due to LNG Ship Motions
in Regular Wave
Aries Sulisetyono
1,a
,
Aditya P. Wibawa
1
,
Yoyok S. Hadiwidodo
2
1
Department of Naval Architecture, Institut Teknologi Sepuluh Nopember, Indonesia
2
Department of Ocean Engineering, Institut Teknologi Sepuluh Nopember, Indonesia
Keywords: Bilobe Tank, Buffle, LNG Ship, Sloshing.
Abstract: This paper describes the sloshing test of the Bilobe LNG tank type due to the LNG ship’s motion in regular
wave. Two-dimensional sloshing of the transverse tank was analysed due to the considered rolling excitation.
The experimental device developed with a principal work to oscillate the filling liquid tank under the
controlled amplitude and period of platform motion. Three variations of the LNG filling level inside the tank
which were an empty condition, 10%, a half condition, 50%, and a full condition, 90%, considered to be
investigated the occurred maximum pressure on the inner wall of LNG tank for certain amplitude and period
of times. The test results represented in terms of free surface patterns that its compared with the simulation
results which computed by the computational fluid dynamics approach for all cases of liquid filling level of
the tank. The comparison results of the sloshing test and the numerical simulation had shown a close with the
root mean square (RMSE) about 4%. Furthermore, the effect of baffle in reducing the sloshing pressure on
the inner wall of tank was also investigated numerically.
1 INTRODUCTION
The sloshing can be interpreted as all movements of
a fluid free surface inside a container, occur as a result
of container’s interference with a fluid partially filled
in a container. The sloshing phenomenon was source
of concern because the pressure that arises can cause
result in destructive stresses (Ibrahim, 2005), as well
as the ship motion stability (Hu et. all, 2017).
The study of sloshing had been carried out by
several researchers using the numerical CFD
approaches such as conducted by (Hou et. all, 2012)
and the testing approaches as conducted by (Brar and
Sigh, 2014). Sloshing tests in the laboratory were
generally intended to validate the results of CFD
simulations (Sinaga, 2014). The way to validate
numerical results could be done by comparing the
pressure value on the numerical results with the test
results under the same tank excitation conditions as
conducted by (Xue et. All, 2017). And another way
of validation was to compare the surface shape of the
numerical liquid results with the results of the tank
test when given the same tank oscillation conditions
as performed by (Chen, 2018). In this last method, the
sloshing was done in 2 dimensions due to the single
motion of ship.
The sloshing test on a box-shaped tank under the
sinusoidal motion performed by author (Pradana and
Sulisetyono, 2018), wherein the test also proposed to
investigate the effect of baffles on the magnitude of
pressures due to sloshing. The results shown that the
addition of a buffer could reduce the pressure on the
tank significantly. The same method was also shown
by (Coulibal et. all, 2018) with a CFD simulation
which states the baffle could reduce the pressure due
to sloshing in the same case of a box tank.
Generally, sloshing studies on LNG tanks were
mostly done for the case of the rectangular tanks
(Coulibal et. all, 2018), or moss tank (Hasheminejad
et. all, 2014), but few study for the cases of Bilobe
tank (Sulisetyono, 2017). Bilobi shape was a type C
of LNG tank or an independent tank which was
formed by the merge of two circular cross section
tank, and it had a certain length.
This paper discusses sloshing testing on the Bilobi
type tank that were originally designed for LNG
vessel tanks (Sulisetyono, 2018). The tank motion
would follow the ship's motion in regular or
sinusoidal waves. The test results were represented in
terms of some snapshot images per time step which
were the shape of the water surface in the tank. These
results were compared with the CFD simulation
Sulisetyono, A., Wibawa, A. and Hadiwidodo, Y.
The Sloshing Test of the Bilobe Tank Type Due to LNG Ship Motions in Regular Wave.
DOI: 10.5220/0010854000003261
In Proceedings of the 4th International Conference on Marine Technology (senta 2019) - Transforming Maritime Technology for Fair and Sustainable Development in the Era of Industrial
Revolution 4.0, pages 91-96
ISBN: 978-989-758-557-9; ISSN: 2795-4579
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
91

results under the same conditions of the filled water,
the motion period, and the motion amplitude. The
sloshing tests were performed with three different
filling levels including 10% h, 50% h and 90% h (h is
of the water surface height from the bottom of tank).
The comparison results had clarified the level
accuracy of the numerical set up which was
quantified in terms of the Root Mean Square Error
(RMSE). Using the same set up running of software,
the sloshing test able to compute the pressure values
in the inner tank. Furthermore, the effects of the
baffle, which was placed inside the tank, was
discussed in this paper.
2 METHODOLOGY
2.1 Dimension of Ship and Tank
The LNG vessel was operating in the Makassar
waters as shown in Figure 1. The ship had a waterline
length (LWL) 103.26 m, width (B) 16.8m, draft (T)
3.4 m, displacement of 5257.62 tons with service
speed of 11 knots.
Figure 1: The LNG Vessel (Sulisetyono, 2018).
Figure 2: Transverse section of bi-lobe tank.
Inside the ship, there were 3 (three) distinct type C
tanks also known as Bilobe tanks. each tank on the
vessel had a capacity of 1270 m
3
with a length of 17.2
m, height of 6.9 m and half the width of the tank of
6.65 m. In this study, a tank in the middle of the ship
was used to be analysed, and it was located the centre
of gravity of ship longitudinally. The transverse
section of tank is presented in Figure 2 since the only
ship rolling motion was considered discuss in this
paper.
2.2 Experimental Setup
The equipment test was developed to oscillate the
model tank for some difference of periods and
amplitudes. This equipment had four main
components, namely docking plate, DC motor low
rpm, motion converter, and model tank. The plate
docking was built to place the model tank in which it
could be rotated by the DC motor with respect to the
axes. Another component was the motion converter
which was to change the rotational of motor into the
translation motion on the edge docking plate. The
advantages of this equipment were the period, and the
amplitude of motion might be controlled by adjusting
the RPM of motor and setup motion converter,
respectively. The sloshing equipment test was shown
in Figure 3.
Figure 3: The sloshing equipment test.
The transverse tank was a symmetrical shape, and
the half tank might be possibly used for a sloshing test
as well as a numerical simulation. The Froude
similitude approach was adopted to set up a
dimensional of tank, an angular velocity, and an
amplitude of motion. The tank model was built with
scale of 1:50 from the full-scale tank which is the
width of 13.3 cm, and the height of 13.8 cm. Length
of the model tank did not follow the scale, because it
did not have any influences to the 2D sloshing
analysis.
The procedure in carrying out the sloshing test
was determined to produce a fluid surface motion in
the tank. The sloshing test procedures included: (i)
filling the bilobe tank with water at the specified
filling level, (ii) put the bilobe tank on the docking
plate by paying attention to the midpoint location, (iii)
adjust the bolt position on the converter wheel to
adjust the amplitude of motion, (iv) adjust the motion
period by the speed controller, (v) use the camera
senta 2019 - The International Conference on Marine Technology (SENTA)
92
recorder to produce the video of sloshing, and the
location of camera must be adjusted, and (vi) sloshing
test with the specified filling level variation had been
recorded with the camera.
The experiment set up were determined such as,
(i) the filing level were variated in 10%, 50%, and 90
% of the tank height, (ii) the variations of amplitude
were obtained such as 2, 3, and 4 cm, and (iii) the
rolling period were including 2, 4, 6, and 8 second,
(iv) the data were taken for 5 second at each filling
level condition.
The sloshing test results were obtained in form of
video, and it was needed to be processed into
snapshot picture at each second. The free surface
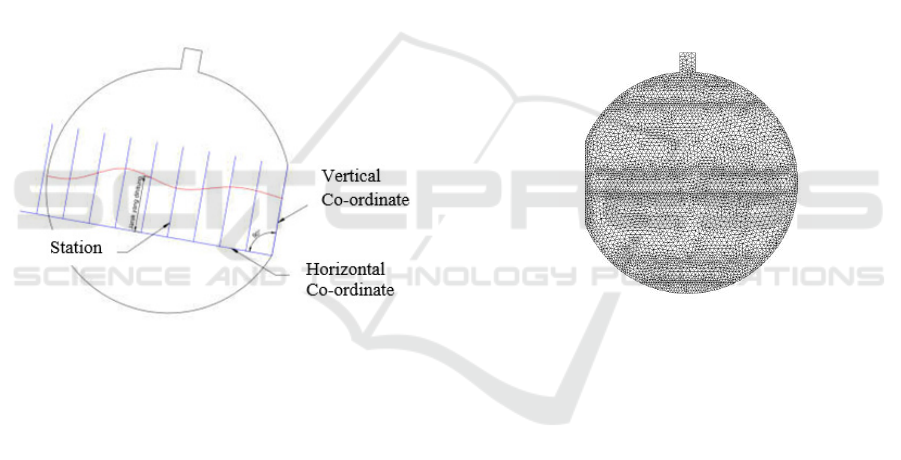
pattern was analysed. Figure 4 explained the
measurement way of the free surface elevation, while
obtaining the base line. The elevation of free surface
was measured from the base line for each station of
13 station lines.
Figure 3: Validation process.
2.3 Numerical Setup
Numerical analysis was performed by using
Computational Fluid Dynamic (CFD) that consider to
rolling motion. The numerical procedures were
developed using a modified version of the approach as
described by (Sulisetyono, 2017) in the UDF program.
The Bilobe tank was modeled numerically using
GAMBIT in a triangular meshing, and the number of
meshing was determined based on the study of grid
independence. It known to the optimum number for
the simulation was about 8192 panels. The meshing
was modeled evenly and equally throughout the fluid
and gas portions in the tank. The sloshing simulation
was conducted using the FLUENT software by first
importing model from GAMBIT. The FLUENT was
a popular CFD application program with the approach
of Fluid Volume Method (VOF).
The simulations used solver-based pressure
solving model with set up of implicit, unsteady, and
non-iterative time advancement formula. The fluid
flow was modelled in two phases with the Volume of
Fluid method. The parameters were explicitly
determined, and the implicit body force formula was
selected. The flow type was assumed turbulent with
k-epsilon, and standard model with standard wall
function. The density of two-phase materials which
were water and air, were specified. The operational
conditions including pressure, gravity, density, and
temperature were determined according to fluid
characteristics. Fluid boundary condition of tank wall
was specified as a zero-velocity condition. User
defined was determined by uploading the libudf
(library user defined function) file into the UDF
library which was a ship rolling code, and compiled
it. Meshing was modelled in dynamic mesh using
layering method and set dynamic mesh zone in the
rigid body of the tank wall.
Figure 5: Meshing with 8192 panels.
2.4 Validation Setup
Validation of the numerical simulation method would
be conducted by comparing the shape of the water
surface due to sloshing tank which produced by the
numerical simulations and the tank tests at the same
conditions of filling level, period, and amplitude. The
comparison of both results carried out under
conditions of filling levels 10%, 50%, and 90% of the
tank height.
For validation, the surface motion of the water
were considered at time steps of 3, 4, 5, 6, 7, and 8
second. The results at time step of 1 and 2 second
were not used since the inert force still influence the
surface motion and it could affect to the accuracy of
results. The results of surface pattern which come
from the CFD analysis and test were expected to give
the same trend, so that the numerical set up obtained
could be said valid. For validation purposed, the
equipment was set up at an amplitude of 5.7o and a
The Sloshing Test of the Bilobe Tank Type Due to LNG Ship Motions in Regular Wave
93
period of 5.98 second. And the different between both
results were expressed in terms of Root Mean Square
Error (RMSE) as formulated in Equation 1.
𝑅𝑀𝑆𝐸
1
𝑛
𝐶𝐹𝐷 𝑇𝑒𝑠𝑡
(1)
After the numerical setup was declared valid, then
the numerical approach was used further to find the
effect of the buffle on sloshing phenomenon. The
existence of the buffle was expected to reduce the
amount of sloshing pressure. In this case, the buffle
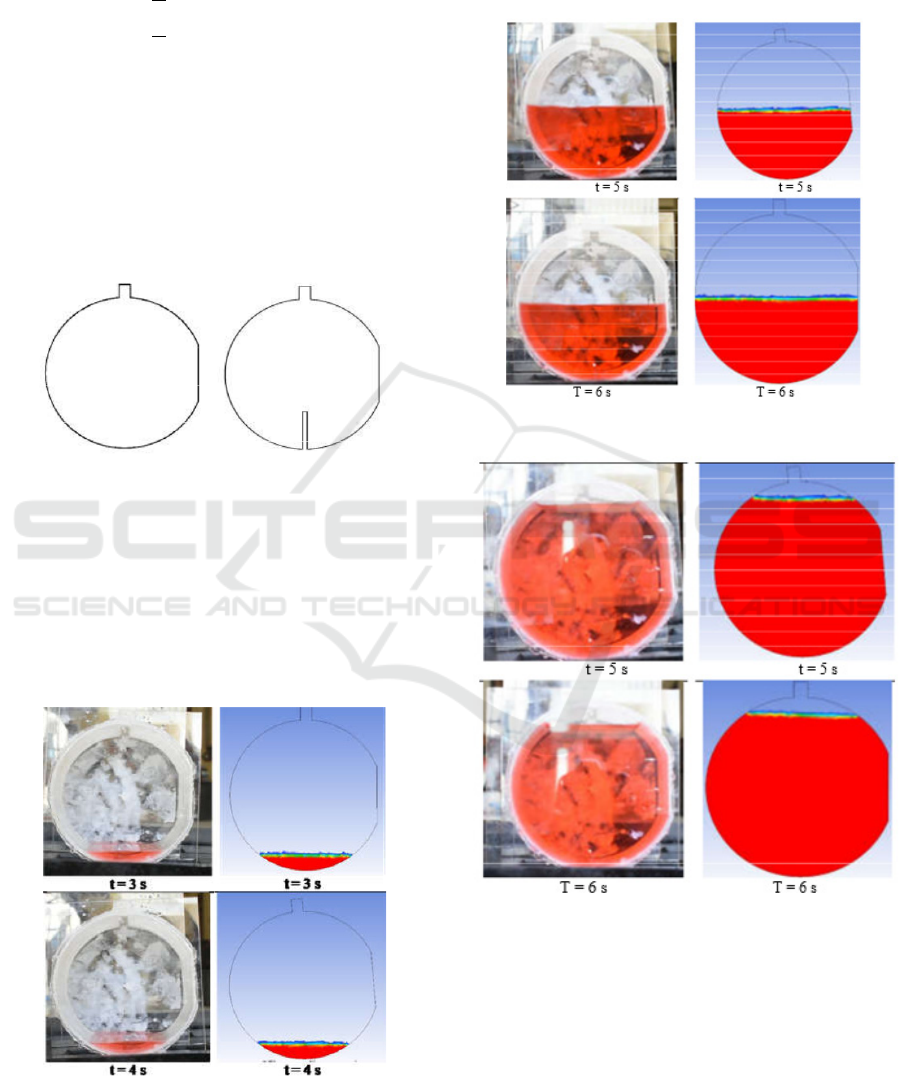
was placed at the middle of the bottom tank as shown
in Figure 6 for tank with and without baffles.
Figure 6: Tank without and with buffle.
3 RESULTS
Figure 7 illustrates the comparison between the
surface shape of the test results with the CFD results
at the condition of filling level 10% of the tank height
for time steps 3 and 4 seconds.
Figure 7: Comparison sloshing test and CFD in 10% h.
Figure 8 and 9 explained the comparison between
the surface shape of the test and the CFD results at the
condition of filling level 50% and 90% of the tank
height for time steps 5 and 6 seconds, respectively.
Figure 8: Comparison sloshing test and CFD in 50% h.
Figure 9: Comparison sloshing test and CFD in 90% h.
To determine the amount of error that occurs
between the test results and CFD results, were first
calculate an average difference between the elevation
of the test results with the CFD results, and secondly
to calculate the RMSE using Equation (1) for all time
steps. Table 1 shown the results of RMSE calculation
for a case of 50% filling level. The same procedure
was applied for the case of 10% and 90% filling level,
and the RMSE of 4.13% and 1.74% respectively.
senta 2019 - The International Conference on Marine Technology (SENTA)
94
Based on the RMSE, it could be stated the setup of
CFD simulation was suitable used for further sloshing
analysis.
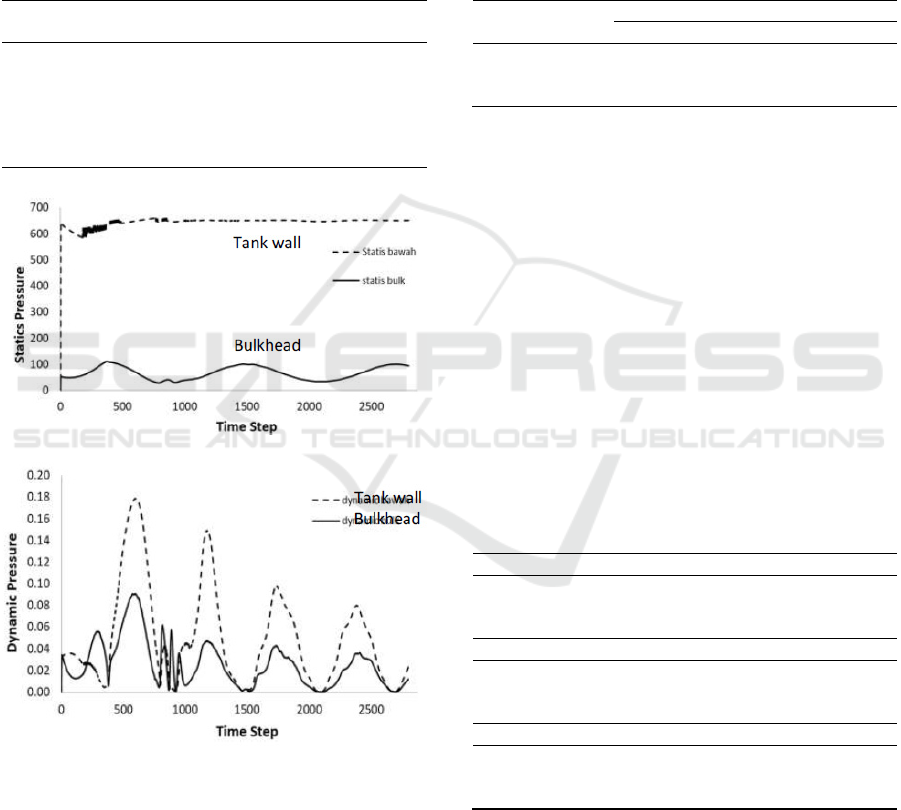
The CFD simulation results were recorded for the
filling level case of 50% h presented in terms of static
and dynamic pressure values. Figure 10 explain the
pressure of static and dynamic in the internal of bilobe
tank for all filling level cases using time step of 0.005
second with the total number of 4000.
Table 1: RMSE of sloshing test and CFD for 50%.
Filling
Level
Time Step
(second)
Error (%) RMSE
(%)
50% 3 2.26 2.1
4 2.72
5 1.45
6 4.58
7 3.52
8 0.71
Figure 10: Static and dynamic pressures filling level 50%h.
Figure 10 shown that the static pressure give more
contribute to the total pressure than the dynamic
pressure, and it shown also for the other cases of filling
level. The value of dynamic pressure was always
different for all the time, and it shown the bottom area
gave more pressure than the other location.
Table 2 explained the recapitulation of dynamic
pressure results for different level filling such as 10%,
50%, and 90% which were located at the Tank
Longitudinal Bulkhead (TLB) and Tank Wall (TW).
Basically, the dynamics pressure on the inner tank
were occurred because of the sloshing on the liquid,
and it was becoming a parameter used to quantify the
sloshing effect. Table 2 shown the most sloshing
effect occurred while the filling level of liquid was
50%h, and it explained that the sloshing effect had
linear with the surface are of liquid.
Table 2: Recapitulation of maximum dynamic pressure.
Filling Level D
y
namic Pressure (Pa)
Tank Wall Lon
g
Bulkhea
d
10%h 0.143 0.000
50%h 0.051 0.066
90%h 0.045 0.053
Table 3 explored the difference of the maximum
dynamic pressure between the sloshing results on the
tank without and with buffle for the filling level case
of 10%, 50% and 90% respectively. All figures
shown the baffle installed on the inner bottom tank
could reduce the maximum pressure on longitudinal
bulkhead up to 50%, 33%, and 30% for filling level
of 10% h, 50% h, and 90% h respectively. The most
contribution of baffle was in filling level 10%
because of the free surface area was reduced by buffle
significantly. Although the free surface area of the
filling level 50% and 90% did not reduced, but the
buffle had contribute increasing the viscous damping.
It was correlation with other research for the case of
rectangular tank (Xue et. all., 2017).
Table 3: Recapitulation of the maximum dynamic pressure
for case with and without buffle.
Filling Level 10%h
Baffle Tank Wall Long Bulkhead (Pa)
With 0.049 0.000
Without 0.199 0.000
Fillin
g
Level 50%h
Baffle Tank Wall Lon
g
Bulkhead
(
Pa
)
With 0.040 0.062
Without 0.177 0.092
Fillin
g
Level 90%h
Baffle Tank Wall Long Bulkhead (Pa)
With 0.032 0.148
Without 0.369 0.212
4 CONCLUSIONS
The innovation equipment was developed to
numerically validate the sloshing simulation that was
conducted by the CFD approach. Results were
The Sloshing Test of the Bilobe Tank Type Due to LNG Ship Motions in Regular Wave
95

validated by looking at the surface water pattern.
Validation was done by comparing the numerical
result with the tank test results with the RMSE
method, and the different was less than 5% for all
cases of filling level. It is shown that the numerical
set up on the FLUENT was made to utilize the
simulation of sloshing. The most sloshing effect
occurred while when the liquid filling level of liquid
was 50% h, and it explained the sloshing effect had
linear to the liquid surface area The use of baffle on
the tank model resulted in a reduction in the
maximum value of dynamic pressure for all cases of
filling level carried out up to 50%. However, the
irregular motion of ship’s sloshing must be performed
in future work complete this work.
ACKNOWLEDGEMENT
The authors wish to thank the RISTEKDIKTI of
Indonesian Government for awarding the scheme of
Basic Research 2019
REFERENCES
Brar, G.S., and Singh, S., 2014. An Experimental and CFD
Analysis of Sloshing in a Tanker. 2nd International
Conference on Innovations in Automation and
Mechatronics Engineering, ICIAME, Procedia
Technology 14 (2014) 490 – 496.
Chen, Y., and Xue, M.A., 2018. Numerical Simulation of
Liquid Sloshing with Different Filling Levels Using
OpenFOAM and Experimental Validation. Water, 10:
1752.
Coulibaly, N., Dosso, M., and Danho, E., 2014. Numerical
simulation of sloshing problem in rectangular tank.
Advances and Applications in Mechanical Engineering
and Technology, 5(1): 1-26.
Hasheminejad, S.M., Mohammadi, M.M., and Jarrahi, M.,
2014. Liquid sloshing in partly-filled laterally-excited
circular tanks equipped with baffles. Journal Fluids and
Structures, 44: 97-114.
Hou, L., Li, F., and Wu, C., 2012. A Numerical Study of
Liquid Sloshing in a Two-dimensional Tank under
External Excitations. Journal Marine Science and
Application, 11: 305-310.
Hu, Z.Q., Wang, S.Y., Chen, G., Chai, S.H., and Jind, Y.T.,
2017. The effects of LNG-tank sloshing on the global
motions of FLNG system. International Journal of
Naval Architecture and Ocean Engineering ,9: 114-125.
Ibrahim, R.A., 2005. Liquid Sloshing Dynamics Theory
and Applications. New York Cambridge University
Press.
Perdana, M.A., and Sulisetyono, A., 2018. Study of
Sloshing LNG Tanks with and without Baffle by
Computational Fluid Dynamic (CFD) Method.
Proceedings of the 3rd International Conference on
Marine Technology (SENTA 2018), Surabaya,
Indonesia.
Sinaga, L.T.P., Utama, I.K.P., and Sulisetyono, A., 2014.
Experimental and numerical of sloshing effect on heave
and pitch Motions of FLNG vessel, Applied Mechanics
and Materials, 664: 153-157.
Sulisetyono, A., 2018. Sloshing Analysis of The
Independent Tank Type C Due to The LNG Ship
Motions Using Computational Fluid Dynamic.
Proceedings of the 9th International Conference on
Thermofluids IX, AIP Conference Proceedings 2001,
010001.
Sulisetyono, A., 2012. Seakeeping analysis of the trimaran
ferry ship in short crested sea for a case of east java
water condition. RINA, Royal Institution of Naval
Architects - International Conference on Ship and
Offshore Technology, ICSOT 2012: Developments in
Ship Design and Construction, Ambon, Indonesia.
Xue, M.A., Zheng, J., Lin, P., Yuan, X., 2017.
Experimental study on vertical baffles of different
configurations in suppressing sloshing pressure. Ocean
Engineering, 136: 178–189.
senta 2019 - The International Conference on Marine Technology (SENTA)
96
