
Emergent Intelligence: A Novel Computational Intelligence Technique to
Solve Problems
Suresh Chavhan and Pallapa Venkataram
Department of Electrical Communication Engineering, Indian Institute of Science, Bangalore, India
Keywords:
Emergent Intelligence, MultiAgent System, Job Scheduling and Resource Allocation.
Abstract:
Technological advancement and increasing globalization makes humans face many problems in day to day life,
involving many possible goals and each goal is associated with multiple possible actions, each associated with
many different dynamic and uncertain consequences. In real systems, the message passing mechanisms and
few computational intelligence techniques (like Swarm intelligence, Multiagent System, etc.) hinder mutual
cooperation and coordination of agents while solving problems in an uncertain environment, even though they
are highly efficient and sophisticated. Therefore, in this paper, we propose an Emergent Intelligence technique
(EIT) based problem solving. The EIT is collective intelligence of group of agents, which is an extension of
multiagent system (MAS). Unlike MAS, the EIT provides independent decision making for a single task by the
multiple agents with mutual coordination and cooperation. It is very useful to solve the complex and dynamic
problems in uncertain environments. In this paper, we discuss EIT functioning, benefits, comparisons, and also
illustration of two problems: (1) resource allocation and (2) job scheduling. Each problem is categorically
analyzed and solved step by step using EIT. We measure performance of the technique by considering real
time situations, and results are compared and shown the importance of EIT over MAS.
1 INTRODUCTION
Problem solving is the process of working through
details of a problem to reach one or more solu-
tions. Problems have some typical characteristics,
such as complexity (large number of items, interrela-
tions and decisions), dynamics (time considerations),
in-transparency (lack of clarity of situation) and poly-
tely (multiple goals). Problem solving may include
mathematical or systematic operations and can be a
gauge of an individual’s critical thinking skills. The
problems are solved using problem solving methods
includes Swarm intelligence, Agent based system,
heuristic algorithms, etc.
Agent-based systems use the set of intelligent
agents for complex problem solving and decision
making. Software agent systems allow a single agent
intelligently interacts and collects relevant informa-
tion to make a decision. In other words an agent
is an authority to take decisions while solving prob-
lems, like conflict problems (Jacak, et.al., 2007), E-
learning (Sun, S., et.al., 2007), medical (Fenza, G.,
et.al., 2012), process automation (Pakonen, A., et.al.,
2007), image analysis (Bell, D.A., et.al., 2007), etc.
Swarm intelligence based system solves asset man-
agement problem (Reynolds, Joshna, et. al., 2015),
real time allocation problem (Johansson, F.,, et. al.,
2010), scheduling problem (Kalyan V., et. al., 2004),
evacuation problem (Guizzi, et. al., 2015), etc. These
methods take indepedent local decisions, individual
interactions, self-aware, provides local view and they
concern managing the agents behavior, like migra-
tion, interaction, mobility, etc., and these behavior
makes less efficient and may lead to delays and less
accurate in decision making.
Hence, we have developed a technique called EI
where multiple agents would take partial or full de-
cisions on a task by using the available and histori-
cal information and the decisions are communicated
to the main task originator. An EI is not attributed
to an individual agent, but it is a global outcome of
group of agents coordination, cooperation, collabora-
tion and negotiation. The Emergent Intelligence is a
main concern of potential users when we try to uti-
lize agent technology for transportation planning, au-
tonomous systems, development of smart city, smart
grid computing, etc. In addition, The EI takes collab-
orative and collective dynamic decisions, group inter-
actions, group aware, provides global view and also
it concerns management of agents behavior and man-
Chavhan, S. and Venkataram, P.
Emergent Intelligence: A Novel Computational Intelligence Technique to Solve Problems.
DOI: 10.5220/0007244100930102
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 93-102
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
93

agement of information, such as resources, jobs, ac-
tivities, tasks, etc. In literature (Rqevski, G., et. al.,
2007), (W.D. Hillis, 1988), (T. Wolf, 2007), (Z. Li,
et. al., 2006), and (P. J. Angeline, 1994) exhibits the
guidelines on how to exploit Emergent Intelligence
and Self-organization in multiagent systems to solve
problems. But it is not clear, how EI technique can be
used for problem solving in uncertain and dynamic
environment.
In this paper, we developed and presented a
novel technique, i.e., Emergent Intelligence Tech-
nique (EIT), which is an extension of multi-agent
system (MAS). We have demonstrated an EIT based
solution by collaborating, coordinating, cooperating
and negotiating the problem solving agents. The
proposed technique solves the problem by executing
6-phases sequentially: (1) Analyzes given problem,
makes clear problem statement and identifies all pos-
sible tasks, subtasks, inputs and outputs; (2) Builds an
EI-network for the given problem; (3) Estimates pos-
sible practical solutions for each sub-task; (4) Creates
action plans; (5) Implements all action plans and (6)
Whenever any changes in input repeats phases from
1-5. In this paper, we have illustrated resource allo-
cation and job scheduling problems, each problem is
categorically analyzed and solved step by step by us-
ing EIT.
The rest of the paper is organized as follows. Sec-
tion 2 presents the literature survey. Section 3 dis-
cusses the EI technique. Section 4 presents the re-
source allocation problem using EI technique. In
Section 5 job scheduling problem solving using EI
technique is discussed. Section 6 case study is de-
scribed; Section 7 simulation and analysis results are
discussed; and conclusions are drawn in Section 8.
2 LITERATURE REVIEW
In this section, we discuss problem solving using the
intelligent systems with swarm intelligence, multia-
gent systems, and emergent intelligence.
2.1 MAS based Problem Solving
Authors in (Jacak, et.al., 2007) solved conflict prob-
lems by coordinating and negotiating multiagent sys-
tems actions to achieve a common goal. An agent
consists of many autonomous components in order to
perceive and react to its environment, plan and ex-
ecute an action, and intelligently it negotiates with
other agents. In (Gundersen, et.al., 2005) authors
have developed a prototype of multi-agent system
based approach to construct plans based on avail-
able resources in the environment, which dynam-
ically plans and solves assigned problems. Also,
MASs have been used to solve problems, such as E-
Learning (Sun, S., et.al., 2007), medical (Fenza, G.,
et.al., 2012), process automation (Pakonen, A., et.al.,
2007), image analysis (Bell, D.A., et.al., 2007). These
kind of systems have traditional benefits of concur-
rent and distributed problem solving strategies (Bala
M., 2008). Novice users suffer from their incapability
to combine individual statements and constructs re-
lated to flowchart, HIPO chart, IPO chart, algorithm,
etc., into valid programs () and (Aris., T.N., 2012).
In (Johansson, F.,, et. al., 2010) authors have focused
on investigating the possibility to use multi-agent sys-
tems as a new agent model for computational problem
solving which is utilized by visual programming as
the mode of programming to make it easier for novice
programmers.
2.2 SI based Problem Solving
Particle swarm optimization is especially useful for
rapid optimization of problem involving multiple ob-
jectives and constraints in dynamic environments.
Work in (Johansson, F., et. al., 2010) particle swarm
optimization has applied to real time allocation prob-
lems and discussed the allocation of weapons for
defensive purposes. Authors in (Reynolds, Joshna,
et. al., 2015) swarm intelligence is used for the au-
tonomous asset management problem in electronic
warfare. The particle swarm optimization speed pro-
vides fast optimization of frequency allocations for
receivers and jammers in highly complex and dy-
namic environments. In (Kalyan V., et. al., 2004)
authors have presented a swarm intelligence based
approach for optimal scheduling problems in sen-
sor networks. Authors have developed a methodol-
ogy and cost function to solve the graph partitioning
problem. The swarm intelligence algorithm solves
the problem and emerges with an optimal schedule.
Work in (Guizzi, et. al., 2015) authors have dis-
cussed the swarm intelligence based solutions to evac-
uation problems. Authors have determined the opti-
mum path during evacuation process by using swarm
intelligence’s algorithms (both ant colony and particle
swarm optimization).
2.3 EI based Problem Solving
Authors in (Rzevski, G., et., al., 2007) described
scheduler behavior using emergent intelligence in
multi-agent systems for not only transportation do-
main and all other logistics applications. Research in
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
94

(T.Wolf, 2007) explained how self-organizing emer-
gent behavior exhibits in multiagent systems. Authors
in (Li, et., al., 2006) carried out the survey of emer-
gent behavior and its impacts on agent-based systems.
Authors in (P.J. Angelone, 1994) demonstrated and
provided the guidelines on how to exploit Emergent
Intelligence to extend the problem solving capabili-
ties.
3 EMERGENT INTELLIGENCE
TECHNIQUE
EIT is collective intelligence of a group of agents.
The EIT is an extension of MAS where agents group
activities and individual independent decision making
are incorporated. The group of agents cooperatively
(whenever agents are compatible towards complet-
ing tasks execution), coordinately (whenever there is
need of agents joint actions for executing tasks) and
collaboratively (whenever agent has insufficient abil-
ity to carry out tasks) interacts among themselves to
provide dynamic independent decisions for the given
problems. The EIT can be used for executing inde-
pendent tasks, which could be parallelly executed and
provides partial (or complete) solution.
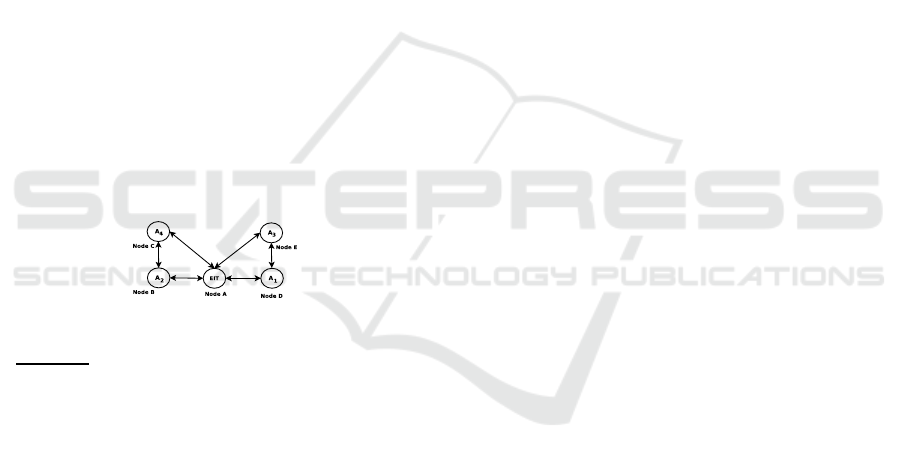
Figure 1: Scenario of 3 nodes network with task and its
sub-tasks.
The EIT is illustrated as follows: Let us consider
the task t
A
in 3-nodes network as shown in Figure 1.
As per the objectives of the task, it is possible to split
the task t
A
into 3-subtasks (st
A
1
, st
A
2
and st
A
3
) which
can be independently solved by 3 agents. Since the
task is initiated at node A where EIT is deployed in it,
which creates 3-agents A1, A2 and A3 and migrates
them to all 3-nodes A, B and C, respectively. These
agents independently solve the task t
A
by considering
all relevant information available locally and globally.
Finally, the decision is communicated to the main task
solving agent A1 as per the following equation
D(t
A
) = D(st
A
1
) + D(st
A
2
) + D(st
A
3
) (1)
where D(st
A
1
), D(st
A
2
) and D(st
A
3
) are the partial or
full decisions taken at nodes A, B and C, respectively.
The same problem would have been solved by the
MAS exclusively at node A by collecting relevant in-
formation from nodes B and C.
The EI technique is elaboratively discussed in the
Section 3.2.
In the literature, we can observe that some of
the attempts made to use EIT for solving problems
(Rzevski, G., et., al., 2007, W.D. Hillis, 1988, T.Wolf,
2007, Z. Li, et., al., 2006, P.J. Angelone, 1994). But
it is not clear, how this technique can be used for the
problem solving in an uncertain domain.
3.1 Definitions
In this section, we present some of the definitions use-
ful to discuss the proposed technique.
1. Task and its subtasks: Task can be decomposed into
independent subtasks. These sub-tasks are assigned
to agents and they execute and produce results. These
results are passed to the main task originator agent
and it takes final cumulative decision.
2. Cluster: A cluster is logically partitioned depend-
ing upon the nodes degree of connectivitygreater than
or equal to 2. The creation of clusters in the given
problem network is given as follows: (i) Select a node
(where problem need to be solved) from the given
problem network, (ii) Agent at the selected node finds
the degree of connectivity (i.e., all 1-hop away nodes),
(iii) Agents at these 1-hop away nodes calculate their
own degree of connectivity, if they have more than 2
then remove from the list of the selected nodes, (iv)
End nodes or nodes which are having only one degree
of connectivity are used to form the cluster at the se-
lected node, and (v) Nodes which are having multiple
degree of connectivity will also follow the above steps
to form their respective cluster. Algorithm 1 explains
the procedure to find the degree of nodes, cluster head
nodes, end nodes, and forms the clusters of the given
network.
Algorithm 1:
Begin
Let n be the total number of nodes in the given problem network
Select a node (where problem need to be solved) from n
/*Identification of degree of nodes in the given problem network*/
Initialize D(i) = 0 (degree of node i).
for i = 1 to n do
for j = i+ 1 to n do
if node i is 1-hop neighbor of j then
D(i) = D(i) + 1
end if
Degree of connectivity of node i is Deg
i
= D(i)
end for
D(i) = 0
end for
/* Identification of highest degree of nodes*/
Initialize m = 0
for i = 1 to n do
for j = i+ 1 to n do
m = max(Deg
i
, max(m, Deg
j
))
end for
Emergent Intelligence: A Novel Computational Intelligence Technique to Solve Problems
95
Highest degree of node is m
end for
/*Formation of clusters*/
for i = 1 to n do
if Deg
i
≥ 2 then
Node i is cluster head
for j = 1 to Deg
i
do
if degree of node j is < 2 then
Node j is the end node.
end if
Cluster i is formed with all the 1-hop away end nodes of node i
end for
end if
end for
End
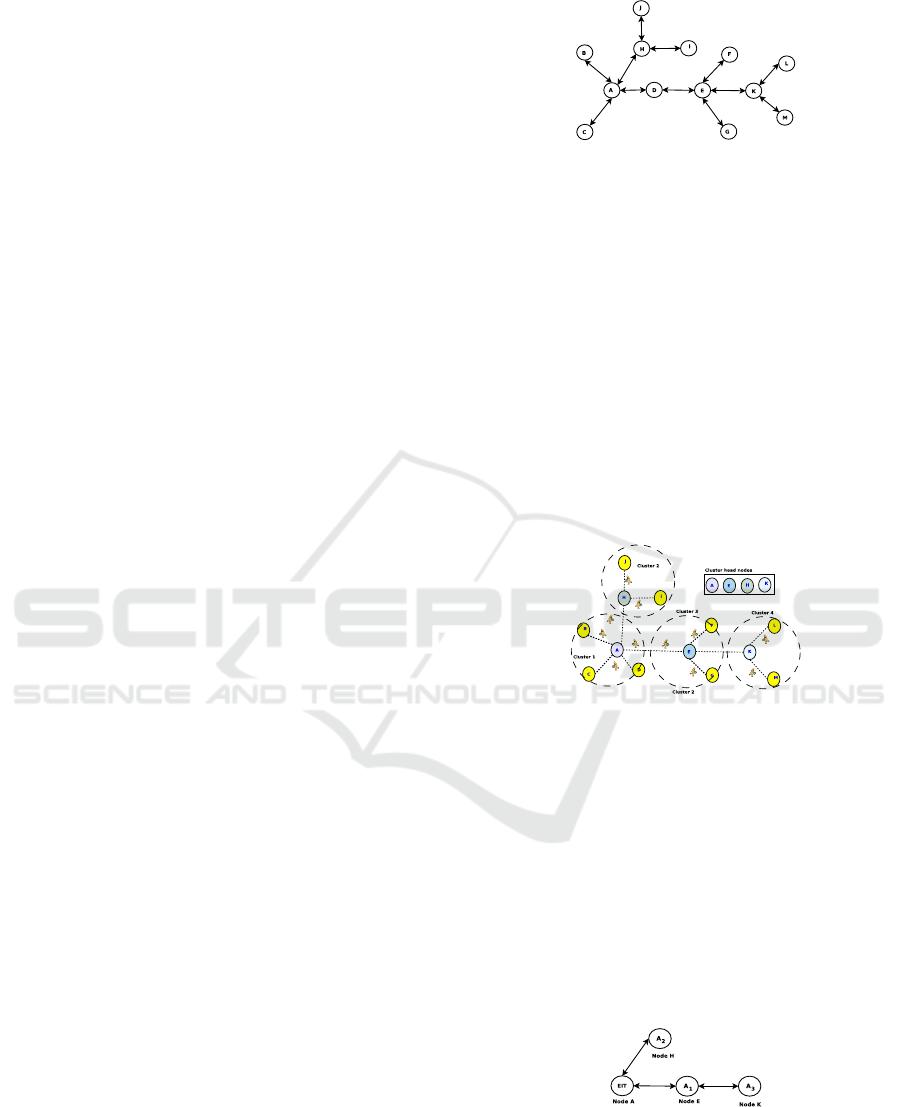
3.EI-Network: It is formed by developing static agent
at each of cluster heads. These agents are connected
as per the requirements in the problem. The EI-
network is formed as follows: (i) EIT running on a
cluster head node (where problem need to be solved)
creates an EI-network, (ii) EI-network consists of
cluster head nodes and their connectivity to solve the
given problem, (iii) EIT creates and sends agents to
cluster head nodes in the EI-network, and (iv) In ev-
ery cluster the cluster head interacts and shares the an-
alyzed information. For example Figure 2 shows the
EI-network with having 5-cluster head nodes, where
EIT is running on node A. EI-network formation is
explained in the Algorithm 2.
Figure 2: EI-network.
Algorithm 2:
Begin
Let A be the node where problem need be solved in the given problem
network
Algorithm 1 provides the number of cluster head nodes (N
c
).
EI-technique runs on a node A
for A
i
= 1 to A
N
c
−1
do
Cluster head node A makes connection with cluster head node A
i
end for
for A
i
= 1 to A
N
c
− 1 do
Cluster head node A creates agent and sends to cluster head node A
i
Migrated agent interacts with cluster head node A
i
and shares the ana-
lyzed information of the given problem
end for
End
3.2 EI-Technique Functioning
Any given problem in terms of goals and barriers can
define many problems and splitting a big problem into
more manageable sub-problems. The EI-technique
solves a given problem in following six phases:
(P1) Analyze the problem, make clear problem state-
ment and identify all inputs and outputs
(i) It analyzes the given network, available and re-
quired information, (ii) It identifies the number of in-
puts, tasks/subtasks and outputs, and (iii) It formu-
lates the problem statement using the available and
required information of the given problem along with
the constraints, such as activity and history database
information.
(P2) Build the EI-network for the given problem:
(i) Creation of clusters, which is explained in Sec-
tion 3.1(2) and (ii) EI-network formation, which is
explained in Section 3.1(3).
(P3) Estimate the practical solution for each sub-task:
(i) Each sub-task is assigned to a cluster-head in the
built EI-network, (ii) EIT makes the cluster head
node’s agents to cooperate, coordinate, collaborate
and negotiate among them to collect the resources
needed for each sub-task, and (iii) Practical solution
is estimated, of each sub-task, by referring to the ac-
tivity and resource utilization database along with the
available and collected resources.
(P4) Create an action plan:
(i) Every agents parallelly refers to history database
to estimate accurate requirements of each of the node,
(ii) In each cluster, the cluster head node’s agent col-
lects the relevant excess resources from nodes in the
cluster, and (iii) In each cluster, cluster head node’s
agent parallelly allocates the resources.
(P5) Implementation of an action plan:
(i) Interaction among cluster head node and other
nodes in the cluster, (ii) Accurate estimation of re-
quirements using history database, (iii) Excess rel-
evant resources collection from the one-hop away
nodes, and (iv) Each cluster head node’s agent par-
allelly allocates the resources.
(P6) Whenever a change in input repeat Phases from
1-5: In this phase, if any change in input or change
in external environment condition it makes to repeat
Phases from 1-5 again.
3.3 Benefits of EI Technique
Benefits of EIT over multiagent system (MAS) in ran-
domness and uncertain problem domains are as fol-
lows:
(1) In EIT, distributed agents take partial or full deci-
sions, whereas in MAS, decisions are unpredictable,
(2) A problem is being automatically decomposed
among distributed agents in EIT, whereas in MAS,
each agent chooses to whether to participate,
(3) Task and its sub-tasks are distributed and decen-
tralized action selection are done in EIT, whereas in
MAS, agents keep their own copies a task/sub-task
that might include others,
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
96
(4) In EIT, distributed agents take the benefits of lat-
est resource available, history database and also new
nodes coming into picture during execution of tasks,
whereas in MAS, takes the benefits of only available
resources during execution of tasks,
(5) EIT reduces complexity (space and time) due to
the concise and natural modeling of problem domain:
(i) In MAS, takes O(n × m) time complexity and
O(n+ m) space complexity, where n is the total num-
ber of agents (or nodes) and m total number of tasks
need to be executed. (ii) In EIT, takes O(n × log(m))
time complexity and O(n+log(m)) space complexity.
(6) In EIT, brings autonomy, flexibility, adaptiveness,
robustness, self-organization and evolution, whereas
in MAS, brings only autonomy,adaptiveness and ro-
bustness and
(7) EIT replenishes environment by creating au-
tonomous regenerating feedback loop by interaction
among group of agents.
3.4 Comparisons of Computational
Intelligence Techniques
In this subsection, we present comparisons among
Computational Intelligence (CI) techniques, that is
MAS, Swarm Intelligence (SI) and EIT. In MAS ap-
proach agents coordinate their knowledge and activ-
ities and reason the processes of coordination au-
tonomously. SI is used to model simple behaviors of
individuals, and local interactions with environment
and neighboring individuals, in order to obtain more
complex behaviors that can be used to solve com-
plex problems. Table 1 shows the comparisonsamong
MAS, SI and EIT.
4 EXAMPLE 1. RESOURCE
ALLOCATION PROBLEM
SOLVING
Problem: A network consists of 13 nodes A, B, C, D,
E, F, G, H, I, J, K, L and M (See Figure 3) and each
of them have 10, 20, 15, 5, 20, 10, 15, 20, 25, 15, 6,
15 and 25 amount of resources, respectively. Each of
these nodes requires 25, 15, 5, 4, 30, 8, 5, 30, 15, 10,
20, 10 and 15 amount of resources.
We demonstrate EI-technique functioning to solve
the above problem by executing following 6-phases:
(P1) Analyze the problem, make clear problem state-
ment and identify all inputs and outputs:
(i) Analyze the problem: (1) There are 13 nodes
in the network A to M, (2) Resources available at
nodes A, B, C, D, E, F, G, H, I, J, K, L and M are
Figure 3: Scenario of a network with 13 nodes.
10, 20, 15, 5, 20, 10, 15, 20, 25, 15, 6, 15 and 25,
respectively, (3) Required resources at each node
are: 25, 15, 5, 4, 30, 8, 5, 30, 15, 10, 20, 10 and
15.
(ii) Problem statement: (1) Choose a node (say A)
to run the EI technique (2) Create clusters with the
nodes having high degree of connectivity. (3) Col-
lect excess resources from its cluster nodes and
from cluster head nodes A, E, H and K. (4) Check
the genuinity of resource requirements using his-
tory. (5) Allocate required resources at nodes A,
E, H and K.
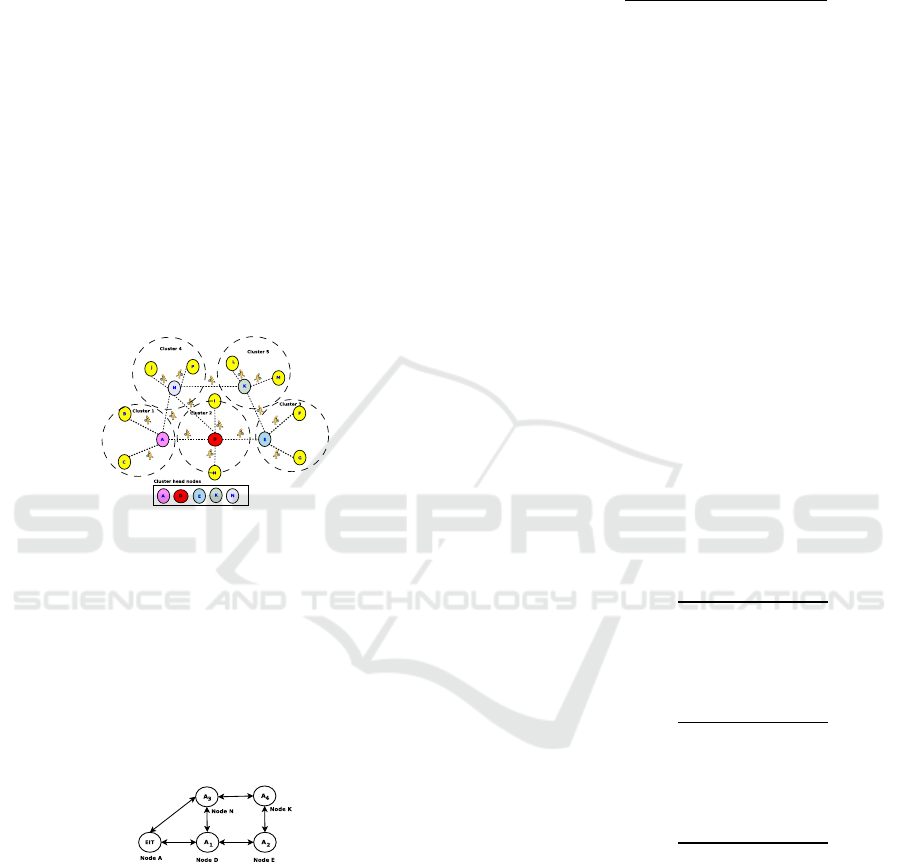
(P2) Build an EI-network for the given problem by
deploying agents at each cluster head by EIT:
Figure 4: Clusters formation of resource allocation prob-
lem.
• Cluster formation (See Figure 4): Algorithm 1
is used to create the following 4 clusters of the
given problem network. EIT forms cluster 1 at
node A, cluster 2 at node H, cluster 3 at node E
and cluster 4 at node K as shown in Figure 4.
• EI-network formation: The EIT running on
node A uses Algorithm 2 to create an EI-
network and deploys agents for interaction to
share the analyzed information of the given
problem (given by Phase 1) as shown in Figure
5.
Figure 5: EI-network of resource allocation problem.
(P3) Estimate practical solution of a problem
(i) Resource collection for estimating solution of
a problem: (1) EIT running on node A indicates
its resource requirements parallelly to cluster head
Emergent Intelligence: A Novel Computational Intelligence Technique to Solve Problems
97
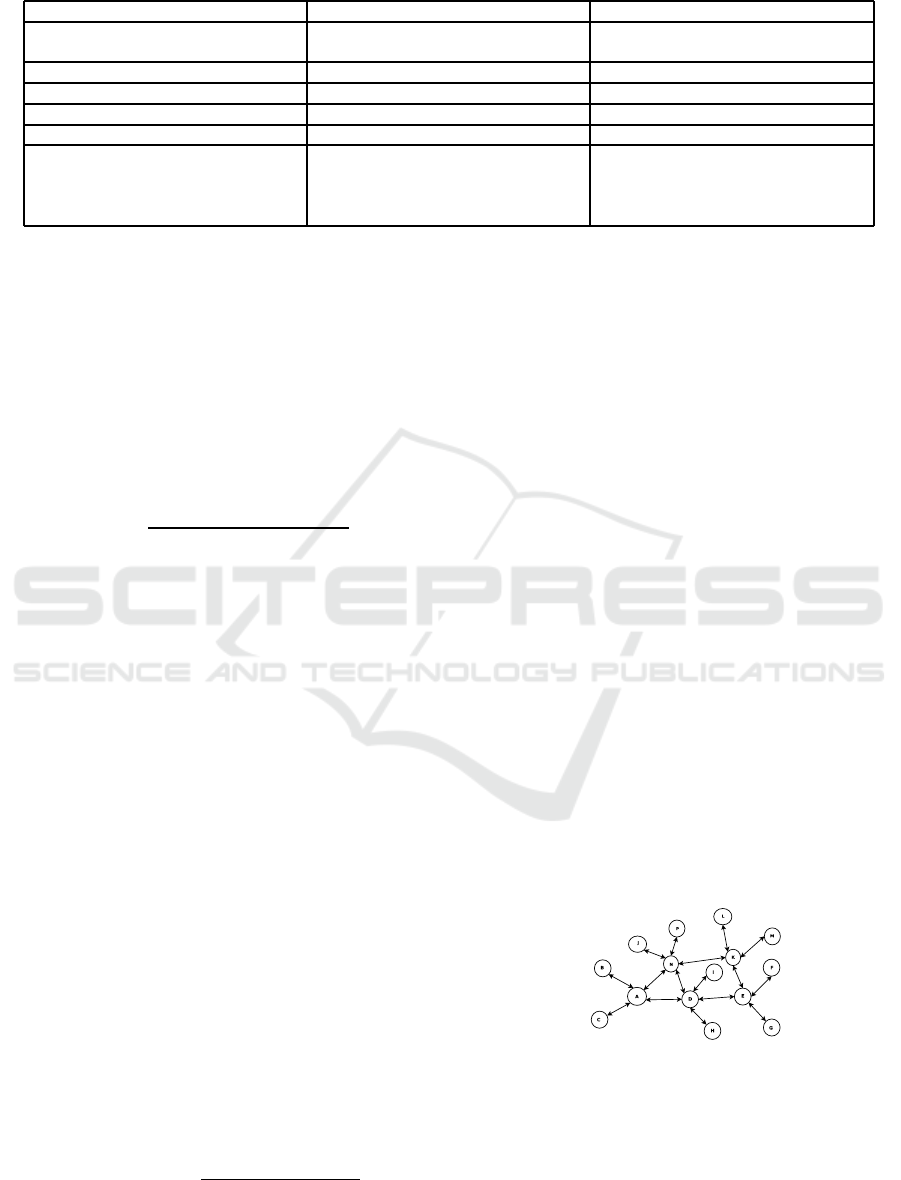
Table 1: Comparisons of EI, MAS and SI.
Multiagent System Emergent Intelligence Technique Swarm Intelligence
Presence of decentralization control Presence of partial decentralization and cen-
tralization control
Presence of decentralization control
Self-aware Group-aware Self-aware
Provides local view provides global view Provides local view
Takes individual decisions Takes collaborative dynamic decisions Takes local indepedent decisions
Individual interactions Group Interactions One to one interactions
Concerns management of agents behavior, like
migration, interaction, mobility, etc.
Concerns management of agents behavior, like
migration, interaction, mobility, etc. and man-
agement of information, such as resources, ac-
tivities, etc.
Concerns management of independent agents
behavior, like migration, interaction, mobility,
etc.
nodes E, H and K, (2) Nodes E, H and K paral-
lelly estimate their excess resources and they pro-
vide to node A, (3) Each agent refers to history
database parallelly to estimate accurate require-
ments of each node, and (4) Each cluster head
node parallelly shares its excess resources to the
requested cluster head nodes depending upon the
history database.
(ii) Practical solution at node A refers to history
database which gives an accurate solution and is
given as
P
i,A
=
R
requir
i,C
1
,A
+ max(H
i,C
1
,A
(t) − R
requir
i,C
1
,A
, 0)
R
avail
i,C
1
,A
+ δR
exc
i,C
1
,C
2
,C
3
,C
4
(2)
where (a) δ is scaling factor and its value is 1
when R
requir
> R
avail
and is 0 otherwise, (b) R
requir
i,C
1
,A
is the i
th
resource requirements by node A in clus-
ter 1, and (c) R
exc
i,C
1
,C
1
,C
3
,C
4
(t) is the i
th
excess re-
sources available in cluster 1 (C
1
), 2 (C
2
), 3 (C
3
)
and 4 (C
4
) is given as
R
exc
i,C
1
,C
2
,C
3
,C
4
(t) =
C
∑
c=1
n
∑
j=1
∆(R
avail
c, j,i
(t) − [R
pred
c, j,i
(t) + R
alloc
c, j,i
(t)])
where ∆ = 1 when R
requir
< R
avail
and ∆ = 0 oth-
erwise whereC is the total number of cluster in the
given network, n is the total number of resources
and H
i,C
1
,A
(t) is the i
th
resource history database
of node A in cluster 1.
(P4) Create an action plan
(i) Cluster head node A parallelly indicates re-
source requirements to all other cluster head
nodes in the EI-network, (ii) Cluster head nodes
(other than A) check genuinity of resource re-
quirements by referring to the history database,
(iii) Node A negotiates resource requirements
with nodes E, H and K, and collects negotiated
excess resources, and (iv) Node A allocates re-
sources using available and collected resources
and is given as
R
alloc
i,A
(t) = n(P) ∗
R
avail
i,A
(t) +
∑
C
c=1
∑
n
i=1
R
coll
i,c
(t)
(1+n) ∗ H
c,i,A
(t)
(3)
where n(P) is the predicted demands at node A.
(P5) Implementation of an action plan:
(i) EIT makes cluster head nodes (A, E, H and
K) agent to cooperate, coordinate, collaborate
and negotiate among them to collect required re-
sources and support for achieving their goals, and
(ii) Resources are allocated at cluster head node
A.
(P6) Whenever a change in input repeat phases from
1-5: In this phase, if any changes in inputs like oc-
currence of new events and resources along with
the change in external environment condition it
makes to repeat phases from 1-5 again.
5 EXAMPLE 2: JOB SHOP
SCHEDULING PROBLEM
Problem: A network consists of 15-nodes A, B, C,
D, E, F, G, H, I, J, K, L, M, N and P (See Figure
6), resources available in these nodes are 10, 20, 15,
5, 20, 10, 15, 10, 5, 10, 15, 10, 15, 10 and 15, re-
spectively. Jobs available at nodes A, D and E are
J
1
, J
2
and J
3
, respectively and these jobs need to be
schedule in a specific order. Each of these jobs require
a specific amount of resources, that is J
1
requires 30,
J
2
requires 20 and J
3
requires 40, before scheduling at
their respective nodes. We demonstrate EI-technique
Figure 6: Scenario of a network with 15 nodes.
functioning by solving the above problem by execut-
ing following 6-phases:
(P1) Analyze the problem, make clear problem state-
ment and identify all inputs and outputs
(i) Analyze the problem: (1) There are 15 nodes
in the network A to I, (2) Resources available at
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
98
nodes A, B, C, D, E, F, G, H, I, J, K, L, M, N and
P are 10, 20, 15, 5, 20, 10, 15, 10,5, 10, 15, 10,
15, 10 and 15, respectively, (3) There are 3 jobs
J
1
, J
2
and J
3
at nodes A, D and E, respectively,
and (4) Job J
1
at node A requires 30, J
2
at node D
requires 20 and J
3
at node E requires 40 amount of
resources for scheduling at their respective nodes.
(ii) Problem statement: (1) Choose a node (say
A) to run the EI technique, (2) Create clusters
with the nodes having high degree of connectivity,
(3) Collect excess resources from its cluster nodes
and from cluster head nodes A, E, D, N and K, (4)
Check the genuinity of resource requirements us-
ing history, and (5) Allocate required resources at
nodes A, E, D, N and K.
(P2) Build an EI-network for the problem by deploy-
ing agents at each cluster head using EIT:
(i) Cluster formation: The cluster formation Al-
Figure 7: Clusters formation of job scheduling problem.
gorithm 1 is used to create following 5 clusters of
the given problem network. EIT forms cluster 1
at node A, cluster 2 at node D, cluster 3 at node
E, cluster 4 at node N and cluster 5 at node K as
shown in Figure 7.
(ii) EI-network formation: EIT running on node
A uses Algorithm 2 to create the EI-network and
deploys agents for interaction to share analyzed
information of the given problem (given by Phase
1) as shown in Figure 8.
Figure 8: EI-network of the job scheduling problem.
(P3) Estimate practical solution of given problem:
(i) Resource collection for estimation of solution
of the problem: (1) EIT running on node A paral-
lelly indicates its resource requirements to cluster
head nodes E, D, N and K, (2) Nodes E, D, N
and K parallelly estimates their excess resources
and they provide to node A, (3) Each agent par-
allelly refers to the history database to estimate
accurate requirement of each node, and (4) Each
cluster head node parallelly shares their excess re-
sources to the requested cluster head nodes de-
pending upon history database. (ii) Practical so-
lution of problem of job J
1
by referring to the his-
tory database at node A is given as
P
i,J
1
,A
=
R
requir
i,J
1
,A
+ +max(H
i, j,A
(t) − R
requir
i,J
1
,A
, 0)
δR
exc
i,J
1
,C
1
+ R
avail
i,J
1
,A
(4)
where (a) δ = 1 when R
req
> R
avail
and δ = 0
otherwise, (b) R
requir
i,J
1
,A
is i
th
resource requirement
by node A for scheduling the job 1, (c) R
exc
C
1
(t)
is excess resources available in cluster 1 (C
1
) is
given as
R
exc
C
1
(t) =
n
∑
j=1
∆(R
avail
j,i
(t) − [R
pred
j,i
(t) + R
alloc
j,i
(t)])
where ∆ = 1 when R
requir
< R
avail
and ∆ = 0 oth-
erwise. (d) H
i,J
1
,A
(t) is the history database of
node A. (iii) Similarly for the jobs J
2
and J
3
at
nodes D and E, respectively are also estimated.
(P4) Create an action plan:
(i) Cluster head nodes D, E, K and N coordinates
with each other, and provides the maximum re-
sources to node A, (ii) These cluster head nodes
check genuinity of resource requirements by re-
ferring to the history database of node A, (iii)
Node A negotiates resource requirements with
nodes D, E, K and N, and collects negotiated
excess resources, (iv) Collected excess resources
and available resources at node A are used for re-
source allocation to schedule the job J
1
, and is
given as
R
alloc
i,A
(t) = n(T
1
) ∗
R
avail
i,A
+
∑
n
m=1
R
coll
i,C
1
,C
2
,C
3
(t)
(1+n) ∗ H
i,A
(t)
(5)
where n(T
1
) is the number of sub-tasks of job J
1
at node A. (v) For scheduling of the Job J
2
, the
resources need to be allocated to it is given as
R
alloc
i,D
(t) = n(T
2
) ∗
R
avail
i,D
+
∑
n
m=1
R
coll
i,C
1
,C
2
,C
3
(t)
(1+n) ∗ H
i,D
(t)
(6)
where n(T
2
) is the number of sub-tasks of job J
2
at node D. (vi) For scheduling of the Job J
3
, the
resources need to be allocated to it is given as
R
alloc
i,E
(t) = n(T
3
) ∗
R
avail
i,E
+
∑
n
m=1
R
coll
i,C
1
,C
2
,C
3
(t)
(1+n) ∗ H
i,E
(t)
(7)
where n(T
3
) is the number of sub-tasks of job J
3
at node E.
(P5) Implementation of action plan:
EIT makes cluster head nodes (A, E, D, N and
K) agent to cooperate, coordinate, collaborate
and negotiate among them to collect required re-
sources and support for achieving their goals.
• Scheduling of Job J
1
at node A: Cluster head
node A parallelly collects excess resources of
nodes in its cluster, allocates required resources
and schedules the job J
1
to the desired destina-
tion.
Emergent Intelligence: A Novel Computational Intelligence Technique to Solve Problems
99
• Scheduling of Job J
2
at node D: Cluster head
node D parallelly collects excess resources of
nodes in its cluster, allocates required resources
and schedules the job J
2
.
• Scheduling of Job J
3
at node E: Cluster head
E parallelly interacts with all nodes of cluster
3, collects their excess resources, allocates re-
quired resources and schedules the job J
3
.
(P6) Whenever changes in input value repeat phases
from 1-5:
In this phase, occurrences of any new jobs and
resources along with changes in external envi-
ronment condition makes to repeat phases from
1-5 again.
6 SIMULATION AND RESULTS
ANALYSIS
In this section, we describe the scenarios (Figures 3
and 6) and performance assessment of the EIT and
MAS by means of conducting the simulation experi-
ments by integrating NS-2 with MobileC agent plat-
form (B. Chen, et. al., 2010, mobilec, 2015). In the
subsequent subsections, we describe simulation sce-
narios, results analysis and comparisons.
6.1 Simulation Scenario
We have considered 13 and 15 number of nodes sim-
ulation scenario in NS2. We have measured the per-
formance of EIT and MAS by running the simulation
600 seconds. The MobileC agent platform is installed
at each cluster head node in the given network, which
deploys static agent. The static agent creates and dis-
patches mobile agents to each cluster head node in
the given problem network. In NS-2, at every nodes
resources are stored in a trace file and given to Mo-
bileC agent platform, where agents collect resources
and provides to the neighborhood cluster head nodes.
In NS-2 we have created cluster (which consists
of all neighborhood nodes), in each cluster all nodes
interact with each other. Agents are deployed by us-
ing MobileC agent platform, which makes to collect
and share available, analyzed, collected and histori-
cal resource information. The performanceevaluation
of the proposed system carried out using the simula-
tion parameters as shown Table 2 on a dual-CPU Intel
Core i5-2400 at 3.10 GHz Desktop computer with 12-
GB RAM running Fedora version 25.
Table 2: Simulation Parameters.
Parameter Values
Simulation area 2400 × 2400
Simulation time 600 sec.
Network simulation NS-2
Agent platform Mobile-C
Number of mobile agents 50
Number of static agents 9
Number of nodes) 15
Communication technology IEEE 802.11a
Network transfer rate 2 Mbps
Data processing rate 100 Mbps
6.2 Results Analysis
In this subsection, we discuss performance analysis of
MAS and EIT in job scheduling and resource alloca-
tion problems.
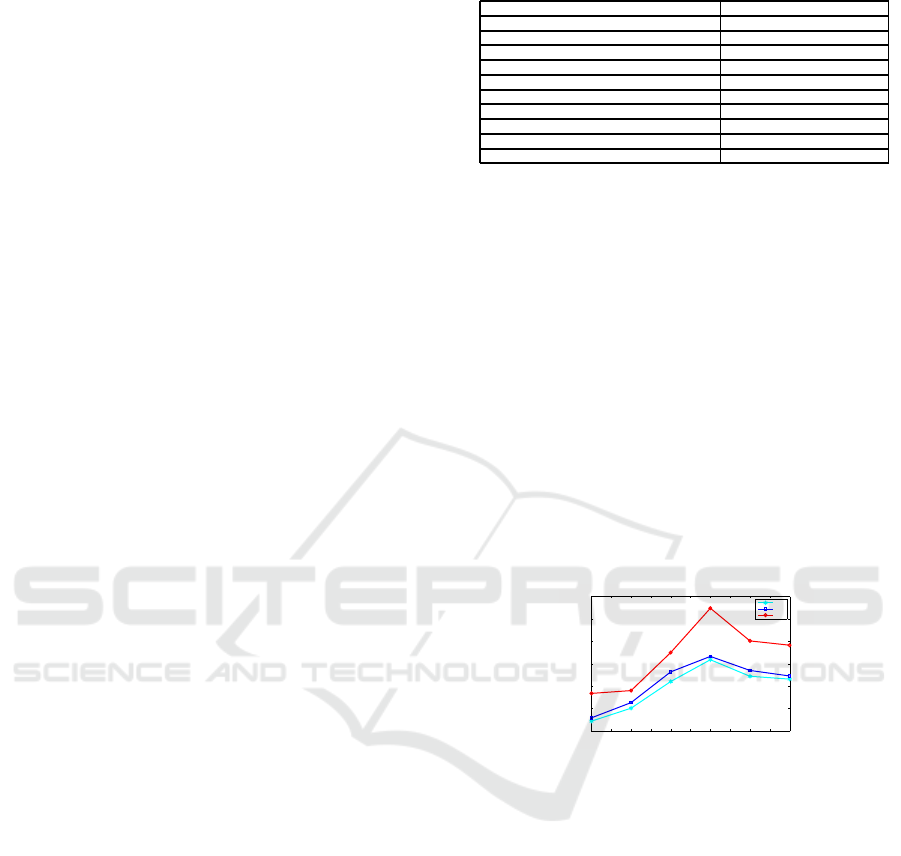
Throughput is the amount of information received
successfully at the cluster head node from the agent,
which is measured in bits per second (bps). In the
simulation, the amount of information received suc-
cessfully and lost during migration of agents from
one node to other to reach the desired cluster head
nodes are determined and generated the data values at
varied time intervals is given in Table 3. Simulation
result 9 shows the variation of throughput of MAS,
SI and EIT at varying simulation time. Throughput
shows the significant improvement in the case of EIT
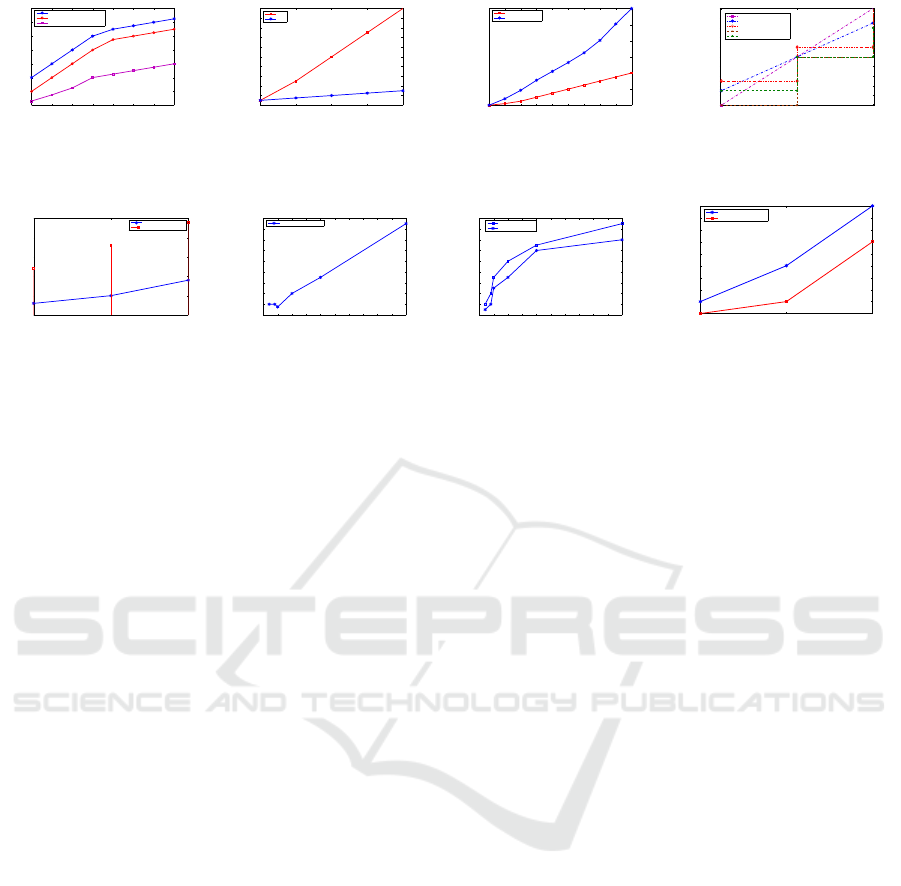
as compared to MAS and SI. Figure 10(a) shows data
100 150 200 250 300 350 400 450 500 550 600
9
10
11
12
13
14
15
Simulation Time (in sec.)
Throughput (Mbps)
MAS
SI
EI
Figure 9: Throughput.
collection time needed by MAS and EIT. When an in-
dividual agent is present than both technique will take
same amount of time to collect data. When there will
be set of agents, then the MAS takes more time for
data collection, because in the beginning these agents
considers only their own goal and later they collab-
orate among them. But in the case of EIT, group of
neighbor agents from the beginning cooperates and
collaborates to achieve the system goal rather than the
individual goal. Hence, EIT takes less time compared
to MAS for data collection.
Due to the diverging interest of each agent in
MAS, stores all resources till completion of job and
hence it reserves space. Therefore, the space com-
plexity of MAS is O(n
2
+ m), where n is total num-
ber of agents and m is total number of resources used
for execution of problem tasks t. EI technique agents
have converging interests and they release resources
after completion of each task and hence requires less
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
100

space compare to MAS. Therefore, the space com-
plexity of EI becomes O(n + log(m)). Figure 10(b)
shows the memory consumption by each agent during
problem solving process in the MAS and EIT. Due
to the divergence and resource reservation policy in
the MAS consumes more memory than the EIT and is
shown in Figure 10(b). Figure 10(c) shows the time
complexity for taking dynamic decisions by MAS and
EIT. In MAS, each agent takes their own decision for
achieving their self-goal, therefore for achieving the
complete system goal takes O(n
2
+ m + t) time and
EIT based decision takes O(n
2
+ log(m + t)). Be-
cause in the case of EIT all agents collaborate and
cooperate depending upon requirements and abilities
for achieving whole system goal. Figure 10(d) shows
resource allocating using MAS and EIT. It shows
clearly that amount of resources available, required,
estimated accurate requirements and allocation for 3-
different tasks. Figure 10(e) shows execution time of
3-tasks of resource allocation problem. MASs have
either diverging information or interests, or both and
reserves the resources till completion of resource al-
location to a task. In EIT, execution time is less as
compared to MAS because tasks are self-organized
in such away that there should not be any conflicts
for resource allocation during execution of tasks in-
dependently. Self-organization realizes global goal
of system during random fluctuations of environment
or conditions. Figure 10(f) shows time taken to self-
organize cluster of agents to achieve global goal of
system during any change in environment.
MAS will adapt using current available data and
history information for executing set of tasks. EIT
makes agent to adapt continuously not only using his-
tory database and current available data, and also us-
ing neighbor agents current and history information
for executing set of tasks. Figure 10(g) sows that
MAS takes less adaptability time than EIT.
We have considered 3-jobs and estimated the ex-
ecution time require to arrange and schedule them in
proper order to their desired destination and is shown
in Figure 10(h). MAS takes more execution time
for job scheduling problem because it re-executes the
same job twice when we decompose its problem into
sub-problems and execute them independently. In
the case of EIT, it decomposes the jobs problem in
such away that they should not be any dependency on
others. Hence, EIT parallelly executes decomposed
problems of jobs and it requires less execution time
as compare to MAS.
Table 3: Throughput of EIT, MAS and SI.
Simulation Time (in
sec.)
MAS SI EIT
100 9.4367 9.5846 10.6734
200 10.0134 10.2643 10.80143
300 11.6038 11.2365 12.49871
400 12.1764 12.3251 14.4768
500 11.4379 11.6982 13.0179
600 11.3127 11.4523 12.8263
7 CONCLUSIONS
We presented the novel EIT for solving problems in
uncertain environments and explained the function-
ing and phases involved. The resource allocation
and job-shop scheduling problems have solved us-
ing EIT. Analyzed the performances of EIT, MAS
and SI by considering performance measures, such
as space complexity, time complexity, data collection
time, throughput, time taken for self-organization and
adaptation. These performance measures are shown
that the EIT performance better than the MAS and SI
for solving problems in uncertain environments.
REFERENCES
Jacak, Witold, and Karin Pr¨oll. ”Heuristic approach to con-
flict problem solving in an intelligent multiagent sys-
tem.” In International Conference on Computer Aided
Systems Theory, pp. 772-779. Springer, Berlin, Hei-
delberg, 2007.
Gundersen, Odd Erik, and Anders Kofod-Petersen. ”Multia-
gent based problem-solving in a mobile environment.”
Norsk Informatikkonferance (2005): 7-18.
Maryam Rajabi, Teh Noranis Mohd Aris, “The Role
of Multi-Agent in Computational Problem Solving
Environments”, In the 4th International Conference
on Electrical Engineering and Informatics, Procedia
Technology, 2013, pp.1103-1109.
Sun, S., Joy, M. & Griffiths, N. The Use of Learning Ob-
jects and Learning Styles in a Multi-Agent Education
System. Journal of Interactive Learning Research; 18
(3); 2007. p. 381.
Fenza, G., Furno, D., Loia, V. Hybrid Approach for
Context-aware Service Discovery in Health care Do-
main. Journal of Computer and System Sciences 78;
2012. p. 123.
Pakonen, A., Tommila, T., Pirttioja, T., Selionen, I. OWL
based information agent services for process monitor-
ing. Emerging Technologies and Factory Automation
( ETFA, IEEE Conference) , Patras, Greece; 2007. p.
9–16.
Bell, D. A., Beck, A., Miller, P., Wu, Q. X., Herrera. A.:
Video Mining –Learning Patterns of Behavior via an
Intelligent Image Analysis System. The 7th Interna-
tional Conference on Intelligent Systems Design and
Applications; 2007. p. 460-464.
Emergent Intelligence: A Novel Computational Intelligence Technique to Solve Problems
101
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
0
2
4
6
8
10
12
14
Data collection (in %)
Data collection time (in minutes)
Individual agent (both MAS and EI)
Set of agents (MAS)
Set of agents (EI)
(a) Data collection time needed
by MAS and EI
1 2 3 4 5
0
20
40
60
80
100
120
140
160
180
200
Number of agents
Memory consumption (in bytes)
MAS
EI
(b) Memory consumption
by each agent during solving
problem: MAS and EIT
0 1 2 3 4 5 6 7 8 9
0
2
4
6
8
10
12
Time (in sec.)
Time required to complete a decision (in sec.)
Emergent Intelligence
MAS
(c) Time complexity of the prob-
lem: MAS and EIT
1 2 3
10
12
14
16
18
20
22
24
26
28
30
Tasks
Amount of resources
MAS based resource allocation
EI based resource allocationn
Required resources
Available resources
Accurate resource requirement
(d) Resource allocation using MAS
and EI technique
1 2 3
0
5
10
15
20
25
Number of tasks
Execution time (in seconds)
EI based task execution
MAS based task execution
(e) Taks execution time using MAS
and EIT:Resource allocation problem
0 5 10 15 20 25 30 35 40 45 50
80
100
120
140
160
180
200
220
240
260
Number of agents
Time taken for self−organization(in seconds)
EI based self−organization
(f) Time taken for self-
organization of clusters of a
problem
0 5 10 15 20 25 30 35 40 45 50
80
100
120
140
160
180
200
220
240
260
Number of agents
Time taken for adaptability(in seconds)
EI based adatability
MAS based adptability
(g) Adaptability of MAS and EIT
for problem solving
1 2 3
1
2
3
4
5
6
7
8
9
10
Number of jobs
Execution time (in seconds)
MAS based jobs execution
EI based jobs execution
(h) Execution time using EI and MAS:
Job scheduling problem
Figure 10: Simulation and Analysis Results.
De Weerdt, M., Bos, A., Tonino, H., and Witteveen, C. A
resource logic for multi-agent plan merging. Annals
of Mathematics and Artificial Intelligence 37 ( 1–2);
2003. p. 93.
Bala M. Developing Intelligent Agent Applications with
JADE and JESS. Springer-Verlag Berlin Heidelberg
Knowledge-Based Intelligent Information and Engi-
neering Systems Lecture Notes in Computer Science.
5179; 2008. p. 236-244 .
Kordaki, M. A drawing and multi-representational com-
puter environment for beginners’ learning of program-
ming using C: Design and pilotformative evaluation.
Computers & Education 54(1); 2010. p. 69-87.
Aris, T.N. An Agent-Based Conceptual Model For Compu-
tational Problem Solving. The International Confer-
ence on Informatics and Applications (ICIA2012) –
Malaysia; 2012. p. 240-248.
Reynolds, Joshua, Lauren Christopher, Russ Eberhart, and
Patrick Shaffer. ”Using computational swarm intel-
ligence for real-time asset allocation.” In Computa-
tional Intelligence for Security and Defense Applica-
tions (CISDA), 2015 IEEE Symposium on, pp. 1-5.
IEEE, 2015.
Johansson, F.; Falkman, G., ”Real time allocation of defen-
sive resources to rockets, artillery, and mortars,” Infor-
mation Fusion (FUSION), 2010 13th Conference on,
vol., no., pp.1-8.
Kalyan V., and Lisa Ann Osadciw. ”Optimal scheduling in
sensor networks using swarm intelligence.” In Pro-
ceedings of 38th Annual Conference on Information
Systems and Sciences, pp. 17-19. Princeton Univer-
sity Princeton, New Jersey, 2004.
Guido Guizzi1, Francesco Gargiulo1, Liberatina Carmela
Santillo1 , and Hamido Fujita, “ Swarm Intelligence
in Evacuation Problems: a Review”.
Rzevski, G. and Skobelev, P, “Emergent intelligence in
large scale multi-agent systems”. International Jour-
nal of Education and Information Technology, 2007,
Vol. 1(2), pp.64-71.
W. D. Hillis, ’Intelligence as an emergent behavior; or, the
songs of eden’, Daedalus (1988), pp. 175–189.
T. Wolf, ’Analyzing and engineering self-organizing emer-
gent applications’, 2007.
Z. Li, C. H. Sim, M. Y. H. Low, ’A survey of emergent
behavior and its impacts in agent-based systems’, in:
Industrial Informatics, IEEE International Conference
on, 2006, pp.1295-1300.
P. J. Angeline, ’Genetic programming and emergent in-
telligence’, Advances in genetic programming 1994,
Vol.1, pp.75-98.
B. Chen, H. H. Cheng, ’A review of the applications
of agent technology in traffic and transportation
systems’, Intelligent Transportation Systems, IEEE
Transactions on 11 (2) (2010) pp. 485–497.
’A multi-agent platform for mobile c/c++ agents’,
http://www.mobilec.org/overview.php, accessed on
June, 2015.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
102
