
Plug and Play Deep Convolutional Neural Networks
Patrick Neary and Vicki Allan
Department of Computer Science, Utah State University, Old Main Hill, Logan, U.S.A.
Keywords:
Image Recognition, Machine Learning, Convolutional Neural Networks, Artificial Intelligence, Hyperparam-
eter Tuning, Deep Learning.
Abstract:
Major gains have been made in recent years in object recognition due to advances in deep convolutional neural
networks. One struggle with deep learning is identifying an optimal network architecture for a given problem.
Often different configurations are tried until one is identified that gives acceptable results. This paper proposes
an asynchronous learning algorithm that finds an optimal network configuration by automatically adjusting
network hyperparameters.
1 INTRODUCTION
There are a variety of neural network structures that
are commonly used in industry and research. Con-
volutional neural networks (CNNs) are a favorite for
image recognition tasks. CNNs have been constructed
using different components. One predominant archi-
tecture uses four building blocks: convolutional lay-
ers, pooling, normalization, fully connected layers,
and activation functions. A major consideration in
CNN design is the number and configuration of each
of the aforementioned components. A network is of-
ten considered ‘deep’ when it has more than two of
these layers.
Numerous applications use CNNs in image recog-
nition. Much of the success achieved in this area is
due to deep neural networks (LeCun et al., 2015).
While deep networks have enabled many interesting
and useful applications, a number of hurdles remain
to be overcome. One hurdle is the fact that, as of
yet, there is not an analytic way to determine the opti-
mal architecture for solving specific problems. Often
researchers create several different network architec-
tures and then select the best one for their applica-
tion ((Schwegmann et al., 2016), (Chen et al., 2016),
(Wang et al., 2017), and (Pu et al., 2016)). Manually
creating architectures and training them can be a time
consuming and laborious process.
One of the challenges in working with neural net-
works is selecting an ideal architecture for a given
task. Currently, to the authors’ knowledge, there is
not a standard approach to building an optimal net-
work configuration. There are different neural net-
work types, and each one has a variety of hyperpa-
rameters that can be adjusted. In this work, filter di-
mensions, number of filters, number of convolutional
layers, number of fully connected layer nodes, num-
ber of fully connected layers, presence of pooling and
normalization are tuned.
Knowledge regarding the science and the art of
parameter tuning for CNNs is required to be suc-
cessful using CNNs. This paper proposes an auto-
mated approach to tuning hyperparameters that gives
the layman and professional alike the ability to gen-
erate CNN architectures which are built and trained
from scratch on their data. We will refer to the algo-
rithm in this paper as ‘Plug and Play’ (PnP) to differ-
entiate it from other algorithms.
2 PREVIOUS WORK
Hyperparameter tuning is not a new problem. (Le-
Cun et al., 1998) discussed the issue back in 1998. It
is well known that architectures play a role in deter-
mining the difference between competitive and non-
competitive results (Domhan et al., 2015).
Early approaches to the hyperparameter dilemma
include a grid space search (LeCun et al., 1998). In
grid space search, upper bounds, lower bounds, and
step size are established for hyperparameters of inter-
est. The algorithm then steps through configurations
in the grid search. If step sizes are too big, the best
configurations may be skipped. The smaller the step
sizes are, however, the longer it takes to run through
the possible combinations of parameters. The number
388
Neary, P. and Allan, V.
Plug and Play Deep Convolutional Neural Networks.
DOI: 10.5220/0007255103880395
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 388-395
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of configurations to test, increases exponentially with
the number of hyperparameter discrete states (Koch
et al., 2018).
Upon completion of the grid search, the best con-
figuration is selected. Problems with the grid search
include spending too much time training spaces that
are known to be irrelevant, and not enough empha-
sis on areas that are of high interest. For example, it
may be the case that increasing the number of neu-
rons in a fully connected layer above 2048, does not
add any benefit. It also may be that using less that 512
neurons per layer produces sub-optimal results. With
a grid search these extremes continue to be explored
despite the fact that they produce bad results or do not
add any benefit.
The approach proposed in this paper is different
from grid search, in part, because it uses correlations
and a binary search method to traverse and identify
the best performing parameter values.
A subsequent approach is random search
(Bergstra and Bengio, 2012). Lower and upper
bounds have to be specified for the random search
and then it will randomly sample the parameter
search space. Upon completion, the best configura-
tion is selected. In practice, a second search is often
performed in the local region of the best performing
configuration. Random search has been found to be
superior to grid search in a variety of applications.
(Bergstra and Bengio, 2012) demonstrated that
random search works better than grid search.
The reason that random search is believed to per-
form better than grid search is because random search
is granted the same computational budget, but is al-
lowed to randomly explore a wider range of config-
urations. It also is not limited to fixed stepped in-
crements between upper and lower hyperparameter
bounds, like within a grid search. Due to the increased
range of hyperparameter values, it is able to find con-
figurations that would have otherwise been impossi-
ble, due to upper and lower bounds of the grid search.
However, it is still possible that the ideal combina-
tion of hyperparameter settings is overlooked because
that combination of parameters is not in the randomly
sampled set (Koch et al., 2018).
Another approach to hyperparameter tuning uti-
lizes Bayesian methods. For example, Sequential
Model-based Algorithm Configuration (SMAC) (Hut-
ter et al., 2011) uses probability models to correlate
hyper-parameters to the loss function. Tree-structured
Parzen Estimator (TPE) (Bergstra et al., 2011) uses
a set of models that effectively track hyperparameter
values that perform well versus those that do not. It
makes decisions regarding how to build the network
architecture based on the models it builds internally.
The grid and random search approaches are attrac-
tive and are used in practice due to their simplicity
(Bergstra and Bengio, 2012). SMAC and TPE are
also used and give good results, but are more com-
plex to implement. All of these approaches require
substantial time to run, and require the practitioner to
provide hyperparameter limits.
Autotune (Koch et al., 2018) is another recent
method for hyperparameter tuning. This algorithm
takes a collection of hyperparameter tuning methods
(Bayesian, random, genetic, DIRECT, etc.) and runs
them in parallel. Information generated from each
method is recorded and used as the collection of algo-
rithms are run. Their tests used 40 parallel compute
nodes and completed their training in a day. Assum-
ing a direct translation from parallel to serial compu-
tation, this approach would take 40 days on a single
compute node. Autotune was built for SAS
R
.
Other efforts have been made to algorithmically
learn optimal network architectures. For example,
(Baker et al., 2016) used a reinforcement learning
based approach. While they were able to achieve
good results, it came at the cost of a significant
amount of training time. For example, it took an aver-
age of 8-10 days to train the first iteration of their al-
gorithm and then additional time to fine tune the train-
ing for subsequent stages. The training took place on
a high end system containing 8 GPUs.
We propose a competing algorithm to the afore-
mentioned approaches that is simple in principle and
in application, while yielding competitive results. In
addition, our approach relieves the user from the bur-
den of determining upper and lower hyperparameter
bounds, learning rates, and other initialization con-
straints. Some hyperparameter tuning algorithms go
through the process of adjusting hyperparameters, but
still leave optimization of learning rates to the user
when the algorithm has completed (Hinz et al., 2018).
Our work handles learning rates as well. The resulting
algorithm can be pointed at a directory of categorized
images and it produces an optimized network archi-
tecture that can be used for their end goals.
3 BACKGROUND
A number of hyperparameters need to be selected
carefully in order to: keep weights from diverging,
ensure quick convergence and achieve optimal results.
These include selecting the learning rate, weight ini-
tialization, and activation function selection.
Plug and Play Deep Convolutional Neural Networks
389

3.0.1 Convolutional Neural Networks
In the context of neural networks, a convolution is a
mathematical operation applied to data presented to
the network. Convolutions are able to take advan-
tage of the two dimensional information in images.
Convolving filters with images allows characteristics,
such as lines and shapes, to be extracted from the im-
age. This information is used to identify objects. Con-
volutional neural networks are often used with im-
agery.
3.0.2 Learning Rates
Many neural networks use gradient descent to update
weights. α, in equation 1, is the learning rate, θ is
a weight, and ‘J’ is the cost function of θ. If the
learning rate is too small, then gradient descent can
be very slow. If it is too large, then the solution will
likely diverge. The best learning rate generally varies
from one architecture and data set to the next because
the dynamics of each is unique.
θ = θ − α
d
dθ
J(θ) (1)
One area of research has focused on how to set
learning rates. In practice, several different learning
rates are tried and the one with the best results is
used. Another common practice is to adjust learning
rates following an exponential decay curve. (Smith,
2017) found that adjusting the learning rate in a trian-
gle waveform (cyclic learning rate) produces excep-
tional results.
3.0.3 Weights
CNNs require weights to be initialized. Weights, im-
properly initialized, can yield vanishing gradients or
result in symmetry between hidden units in a given
layer. A standard approach for initializing weights is
to use a Gaussian distribution with 0.01 standard de-
viation.
An improvement on this approach is the ‘Xavier’
method suggested in (Glorot and Bengio, 2010). This
method uses equation 2 to generate weights, where
n
in
is the number of inputs coming into the neuron
and n
out
is the number of neuron outputs to the next
layer. ‘Var’ is the variance to be applied to the neuron
weights, ‘W’, when initialized. This allows weight
initialization to vary appropriately with network con-
figuration.
Var(W ) = 2
1
n
in
+ n
out
(2)
3.0.4 Activation Functions
Rectified linear unit (ReLU) activation functions
have been critical in enabling deep network success
(Krizhevsky et al., 2017). One problem with ReLU
activation functions is that they may die at zero dur-
ing training, subsequently leaving the node worthless.
A significant solution to this problem is the Paramet-
ric Rectified Linear Unit (PReLU) (He et al., 2015)
which allows negative values rather than bottoming
out at zero.
3.0.5 Filters
Each individual filter is tuned to pull out specific fea-
tures in an image. For example, filters may identify
horizontal and vertical features in an image. Gener-
ally, deeper layers are able to identify more complex
patterns and objects within an image.
It is not always known beforehand how many fil-
ters are needed to identify features of interest in a data
set. This research explores setting these values algo-
rithmically, thus saving time for the practitioner. The
algorithm explores the space of options based on cor-
relations between parameter settings and resulting ac-
curacy.
3.0.6 Pooling
There are a wide variety of ways to modify convo-
lutional neural network architectures. Two common
operations are pooling (Scherer et al., 2010) and nor-
malization (Ioffe and Szegedy, 2015).
Pooling is a process that helps reduce data dimen-
sions in the convolutional neural network. Gener-
ally, when pooling is applied, a 2x2 mask is used to
slide over every product that comes out of a convo-
lutional layer. In max pooling, for example, the 2x2
mask is moved over the data and the maximum value
from the area under the mask is passed to the output.
Similarly, average pooling will take the average value
of the masked area and use it to create a new two-
dimensional data set.
3.0.7 Normalization
Another common operation is layer normalization.
Layer normalization is a process where inputs to neu-
rons in a layer are normalized. It is performed by us-
ing Equation 3, where ¯x is calculated from all inputs
to neurons in the current layer for a single instance.
The purpose of normalization is to help with vanish-
ing and exploding gradients.
ˆx =
x − mean(¯x)
std( ¯x)
(3)
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
390
3.0.8 Fully Connected Layer
On the output of the last convolutional layer, there is
often a fully connected network. More than one fully
connected layer (FCL) may be present. FCLs have
the role of identifying patterns and predicting results.
FCLs can take on any number of layers and any num-
ber of perceptrons in each layer.
This work introduces an asynchronous approach
to methodically move through network architectures.
The algorithm settles on an architecture that gives
competitive performance. All the user has to do is
point the algorithm at a directory of images and press
the ‘go’ button. When the algorithm has finished run-
ning, a network architecture is ready that can give
great results.
The contributions of this paper include the fol-
lowing. Bringing together disparate algorithms into
a cohesive approach for automatically tuning hy-
perparameters. Specifically, the algorithm identi-
fies optimal network weight distributions and maxi-
mum/minimum learning rates unique to each network
architecture. The algorithm moves through various
architectures in an asynchronous fashion. In the end,
a network architecture with corresponding weights is
produced in a format that can be directly applied by
the end user. This is accomplished in much less time
than competing methods. The user does not need to
provide upper or lower limits for any of the hyperpa-
rameters.
4 METHODOLOGY
While the tuning algorithm is running, training takes
place long enough to determine whether the changes
have produced favorable results or not. Once the al-
gorithm has completed, the training is allowed to con-
tinue for a longer period of time to generate final re-
sults.
From a high level, the current tuning algorithm
works through the convolutional layers first, followed
by the fully connected layers. One of the fundamen-
tal ideas in this hyperparameter tuning algorithm is to
identify the correlation between accuracy and the di-
rection that parameters are adjusted. This correlation
is used to direct the adjustment of the hyperparameter.
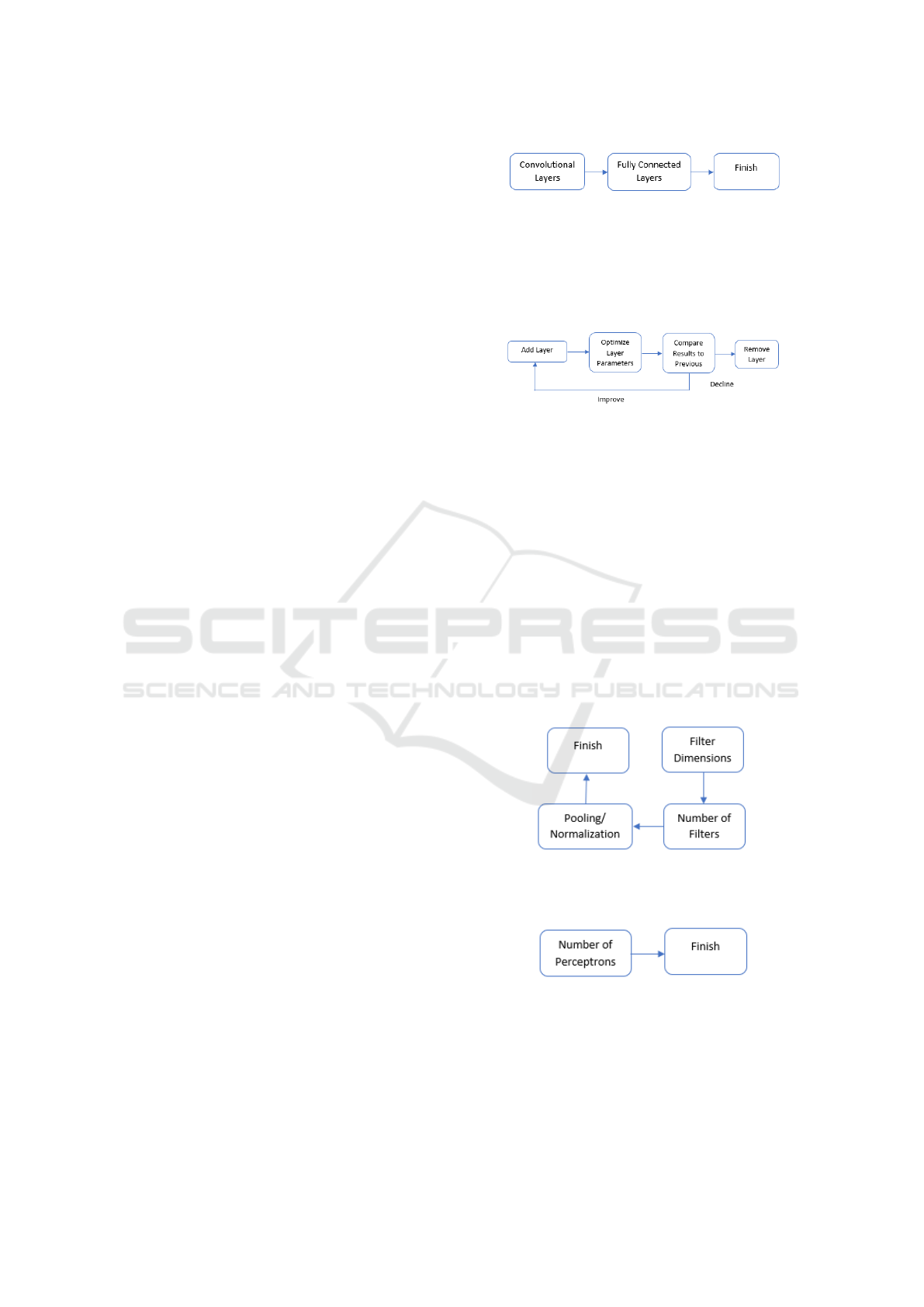
Figure 1 displays the high level convolution layer
tuning process. It shows that the convolution layers
are first tuned, followed by the fully connected layers.
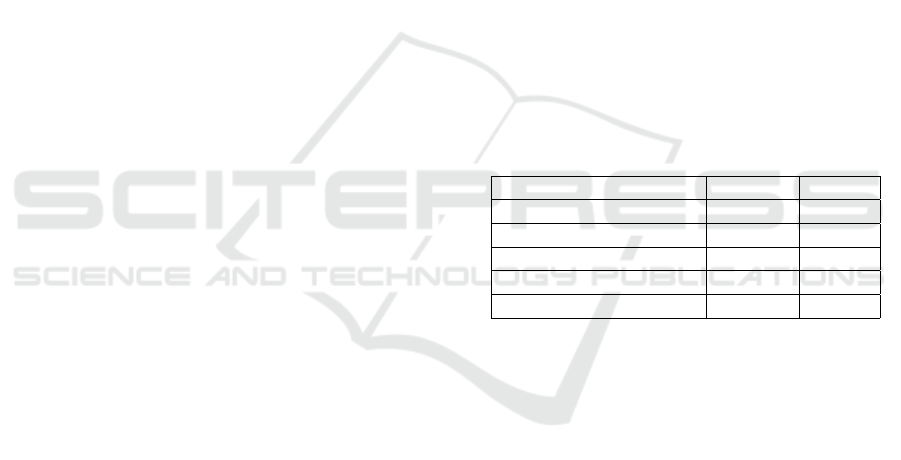
Figure 2 shows the process undergone in both
the convolutional and fully connected layers. A new
layer is added, relevant hyperparameters are tuned,
and then results are compared to previous results. If
Figure 1: High level approach to tuning. Convolution layers
are first tuned, followed by fully connected layers.
there is an improvement, another layer is added and
the process is repeated. If the results degrade, then
the layer causing the degradation is dropped, and then
the loop exits.
Figure 2: Tuning for convolution layers. Layers are added
one at a time according to this process.
For tuning hyperparameters in the convolution
layers, the process in Figure 3 is followed. Figure
3 represents the “Optimize Layer Parameters” block
in Figure 1. Filter dimensions, number of filters, and
pooling/normalization are evaluated in sequence. In
the example of filter dimensions, three different di-
mensions are evaluated. The resulting accuracies are
evaluated and a correlation is calculated. Once the di-
rection to change parameters is determined, a binary
search is used to identify the best performing hyper-
parameter value. Once the number of filters have been
set, pooling and normalization are applied to see if
they improve the overall performance of the layer. If
not, they are removed.
Figure 3: Tuning for a single convolution layer. Hyperpa-
rameters for each layer are tuned before moving on to the
next layer.
Figure 4: Fully connected layer tuning. The number of neu-
rons is optimized, layer by layer, in the fully connected por-
tion of the network.
The fully connected layers currently have two pa-
rameters of interest, the number of fully connected
layers and the number of perceptrons in each layer.
Figure 4 represents the “Optimize Layer Parameters”
Plug and Play Deep Convolutional Neural Networks
391
block in Figure 1. Correlations are used to determine
the direction to adjust the parameter, followed by a
binary search for the best performing value. When
there is a degradation in final results, the current layer
is removed and the previous configuration is used.
With the high level algorithm established, we will
discuss how each hyperparameter is selected in more
detail.
To identify the best filter dimensions, five asyn-
chronous training agents are launched. Each agent
trains a configuration where everything but the filter
dimensions are kept constant. As each agent com-
pletes, it returns the training accuracy. The new train-
ing accuracies are compared and the filter dimension
that yields the best results is returned to the main
agent.
After optimizing filter dimensions, the number of
filters for the current convolution layer is identified.
Again, asynchronous training agents are launched,
each one with a unique number of filters while all
other hyperparameters are kept constant. The filter
configuration that produces the best accuracy is re-
turned to the master process.
With the number of filters and their dimensions
fixed, the fully connected layer configuration is ex-
plored next. To identify the best configuration for
the first layer, asynchronous agents are spawned that
identify the best number of nodes for the first fully
connected layer. Next, a new fully connected layer
is added, and a new set of asynchronous agents are
spawned. Additional fully connected layers are added
until improvement in accuracy drops. When accuracy
drops, the most recently added layer is dropped, the
algorithm terminates, and the resulting network archi-
tecture is saved.
Each time a new architecture is created as previ-
ously described, the system identifies the maximum
and minimum learning rates. Each iteration requires
identifying the maximum and minimum because each
configuration has different dynamics than the last.
Additionally, cyclic learning rates are used in the pat-
tern established by (Smith, 2017).
5 RESULTS
In this section we discuss configuration details for the
experiments and the subsequent results.
5.1 Experimental Setup
While many interesting data sets exist, most compara-
ble hyperparameter tuning algorithms that have been
published, work with MNIST and CIFAR-10. Due to
the broad support of these two data sets, this work will
also use them to compare results against other estab-
lished methods.
The MNIST and CIFAR-10 data sets each have
60,000 images. The sets partition 50,000 images for
training and validation, while 10,000 images are re-
served for testing. From the set of 50,000 images,
75% of the data is used for training and 25% is used
for validation. All images are organized into a folder
structure where each image class is contained in a
sub-directory.
Training was performed on a Windows laptop
with 8 CPU cores and an NVIDIA GeForce GPU.
For this research the following hyperparameters are
adjusted: number of weights, learning rates, convolu-
tional layers, number of filters per layer, size of the
kernels, number of fully connected layers, and num-
ber of neurons in each fully connected layer. The cost
calculation is based on a softmax cross entropy func-
tion.
As a starting point, the algorithm uses the param-
eters outlined in Table 1.
Table 1: Starting hyperparameter configuration. Hyperpa-
rameter values are listed, along with the starting value and
the amount by which the parameters can change.
Hyperparameter Start Val Inc Val
Filter Dimensions 3x3 1x1
Number of Filters 32 32
Convolution Layers 1 1
Fully Connected Layers 1 1
Neurons per FCL 32 32
While there are a variety of activation functions
to choose from, we chose to use PReLu for reasons
discussed in Section 3.
There are also a variety of optimization algorithms
to use in training. Rather than using gradient descent,
we use the Adam Optimizer (Kingma and Ba, 2014)
for training. Adam provides faster convergence in
training than gradient descent and is, consequently, a
good selection for hyperparameter tuning.
When CNNs are created in this work, weights are
initialized using the Xavier methodology (Glorot and
Bengio, 2010).
5.2 Experiment Results
The methodology section discussed the approach
taken to optimize hyperparameters. Each convolution
layer is built up sequentially starting with the number
of filters followed by the filter dimensions. Training at
each level happens with asynchronous agents that re-
turn their results to the master agent. Each agent starts
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
392

by identifying the maximum learning rate to use and
then employs a decreasing maximum cyclic learning
rate during training. Once the convolution layers have
converged to the maximum extent possible, the fully
connected layers are then adjusted cyclically.
The learning agents are allowed to run through the
hyperparameters as previously discussed. The algo-
rithm achieves an accuracy of 99.1% for the optimal
result for the available range of hyperparameters for
the MNIST data set.
Table 2 shows convergence of the MNIST data set
using this algorithm. For entries in the ‘Filter Dimen-
sions’ column, the list on each row shows the final
filter dimensions selected for each convolution layer.
[[5, 5], [5, 5]], for example, indicates that the first
and second convolution layer filters have dimensions
of 5x5. Each entry in the ‘Filters’ column shows the
number of filters for each convolution layer. ‘FCLs’
shows the number of neurons in each fully connected
layer. ‘Acc’ indicates the final accuracy upon com-
pletion. The architecture settled on filter dimensions
of [[5,5], [5, 5]] for the first two convolutional lay-
ers, [256, 32] for the number of filters for the first two
convolutional layers, and [128, 10] for the number of
neurons in the fully connected layers.
Table 2: MNIST algorithm progression summary.
Filter Dims Filters FCLs Acc
[[3, 3]] [32] [64, 10] 97.65%
[[3, 3]] [32] [128, 10] 98.12%
[[5, 5]] [32] [128, 10] 98.55%
[[5, 5]] [256] [128, 10] 98.8%
[[5, 5], [5, 5]] [256, 32] [128, 10] 98.85%
[[5, 5], [5,5]] [256, 64] [128, 10] 99.1%
Table 3 shows CIFAR-10 progression of network
architecture parameters and the corresponding im-
provement in accuracy. The columns have the same
format as table 2. As with the MNIST data set, we can
see that the CIFAR-10 accuracy goes from 62.99% to
82.56% through the lifetime of the algorithm.
There is a 16.5% difference in accuracy between
the MNIST and CIFAR-10 data sets. This is due to
the increased complexity within the CIFAR-10 data
set, relative to MNIST.
6 DISCUSSION
One of the intriguing results from this paper is the
fact that this algorithm can be pointed at a directory
of images, and without any prior knowledge of im-
age details, network architectures, or hyperparameter
nuances, this algorithm is able to construct and train,
from scratch, a deep CNN.
As demonstrated in Tables 2 and 3, the algorithm
builds network architectures with progressively better
accuracy. There are several important pieces that en-
able this to come together. One is appropriate weight
initialization. Timely convergence is more difficult
with deep networks when weights are not properly
initialized. Another key element is identifying ideal
learning rates. Cyclic learning rates allow for quick
convergence.
This novel approach to hyperparameter tuning is
significant because it brings the ability to generate a
trained network structure to those that do not have
a deep understanding of architecture design. It al-
lows one to gather a data set and then jump to using
a trained neural network while letting the algorithm
work through network architecture design details.
Table 4 contains a comparison of results for hy-
perparameter tuning for the MNIST data set. In this
table, random grid, TPE, SMAC (all from (Thornton
et al., 2012), PnP, and RL (Baker et al., 2016) are
compared against each other. (Thornton et al., 2012)
ran a series of automated hyperparameter tuning al-
gorithms using their suite of tools with the MNIST
data set. They allowed Random Grid search to run
for 400 hours while TPE and SMAC ran for 30 hours
each. The reinforcement learning algorithm obtained
an impressive 99.56%, but with the cost of 192 hours
of training. The PnP algorithm was able to achieve
99.1% with 4 hours of training. PnP was able to
achieve very good results at a substantial time savings
relative to the other algorithms.
Table 5 contain results of the PnP algorithm com-
pared to other algorithms. The Weka Random Grid
(Thornton et al., 2012) approach was allowed to run
for 400 hours to reach an accuracy of 35.46%. No in-
put from the user was required. TPE and SMAC were
run by (Domhan et al., 2015). They did have to set
the upper and lower bounds for their algorithm. Fol-
lowing 33 hours of training they were able to achieve
accuracies of 82.53% and 81.92%. The reinforce-
ment learning algorithm was able to get an impres-
sive 92.68% accuracy, but after 192 hours of training.
The PnP algorithm was able to achieve 82.56% accu-
racy after 7 hours of training. Again, PnP was able to
achieve competitive results at a substantial time sav-
ings relative to the other algorithms.
Another aspect of consideration in automatic hy-
perparameter tuning is the level of expertise needed.
Setting up a reinforcement learning approach to ob-
tain optimal hyperparameter values is a non-trivial
task, and one that most neural network practitioners
are not likely to take on. In theory, it is an interest-
Plug and Play Deep Convolutional Neural Networks
393
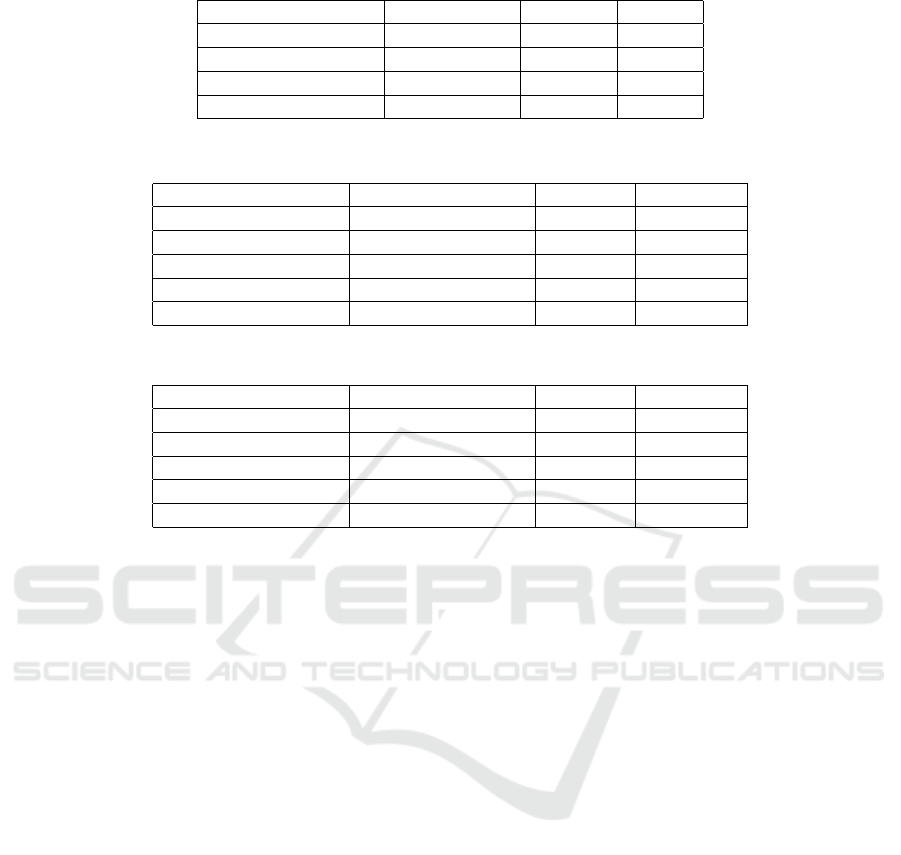
Table 3: CIFAR-10 algorithm progression summary.
Filter Dims Filters FCLs Acc
[[5, 5]] [32] [384, 10] 62.99%
[[3, 3]] [32] [384, 10] 62.55%
[[3, 3], [5, 5]] [32, 128] [384, 10] 72.03%
[[3, 3], [5, 5], [5, 5]] [32, 128, 256] [384, 10] 82.56%
Table 4: MNIST comparison with other methods.
Algorithm User Defined Limits Accuracy Time (Hrs)
(Weka) Random Grid No 96.21% 400
RL No 99.56% 192
(Auto Weka) TPE No 81.97% 30
(Auto Weka) SMAC No 96.44% 30
PnP No 99.1% 4
Table 5: CIFAR-10 comparison with other methods.
Algorithm User Defined Limits Accuracy Time (Hrs)
(Weka) Random Grid No 35.46% 400
RL No 92.68% 192
TPE Yes 82.53% 33
SMAC Yes 81.92% 33
PnP No 82.56% 7
ing exercise, but when it comes to finding an opti-
mal architecture for a specific application, it is the au-
thors’ argument that most practitioners cannot afford
the cost in time or expertise associated with that ap-
proach. In light of the cost associated with time and
expertise, the PnP approach is very favorable.
7 CONCLUSION
In conclusion, we can see that the PnP algorithm can
be applied to hyperparameter tuning of CNNs to find
an optimal solution. It generates architectures that
give competitive results with significantly less train-
ing time than other state of the art approaches.
There are a variety of ways that this work can be
extended in future work. For example, after running
PnP, a user may want to use the resulting architecture
as a starting point for a more localized random search.
Additionally, PnP results could be integrated into the
RL algorithm as a way to provide better quality inputs
to learn from. This could potentially reduce the train-
ing time currently required for the algorithm. For the
user that wants to do a lot of manual tweaking, PnP
can give a baseline to start from.
REFERENCES
Baker, B., Gupta, O., Naik, N., and Raskar, R. (2016). De-
signing neural network architectures using reinforce-
ment learning.
Bergstra, J., Bardenet, R., Bengio, Y., and Kgl, B. (2011).
Algorithms for hyper-parameter optimization. In Pro-
ceedings of the 24th International Conference on Neu-
ral Information Processing Systems, NIPS’11, pages
2546–2554. Curran Associates Inc.
Bergstra, J. and Bengio, Y. (2012). Random search for
hyper-parameter optimization. 13:281–305.
Chen, X.-Y., Peng, X.-Y., Peng, Y., and Li, J.-B. (2016).
The classification of synthetic aperture radar image
target based on deep learning. Journal of Information
Hiding and Multimedia Signal Processing, 7:1345–
1353.
Domhan, T., Springenberg, J. T., and Hutter, F. (2015).
Speeding up automatic hyperparameter optimization
of deep neural networks by extrapolation of learn-
ing curves. In Proceedings of the 24th International
Conference on Artificial Intelligence, IJCAI’15, pages
3460–3468. AAAI Press.
Glorot, X. and Bengio, Y. (2010). Understanding the dif-
ficulty of training deep feedforward neural networks.
In Proceedings of the Thirteenth International Con-
ference on Artificial Intelligence and Statistics, pages
249–256.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delving deep
into rectifiers: Surpassing human-level performance
on ImageNet classification.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
394

Hinz, T., Navarro-Guerrero, N., Magg, S., and Wermter, S.
(2018). Speeding up the hyperparameter optimization
of deep convolutional neural networks.
Hutter, F., Hoos, H. H., and Leyton-Brown, K. (2011). Se-
quential model-based optimization for general algo-
rithm configuration. In Proceedings of the 5th Inter-
national Conference on Learning and Intelligent Opti-
mization, LION’05, pages 507–523. Springer-Verlag.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing inter-
nal covariate shift. arXiv:1502.03167 [cs]. arXiv:
1502.03167.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization.
Koch, P., Golovidov, O., Gardner, S., Wujek, B., Griffin, J.,
and Xu, Y. (2018). Autotune: A derivative-free opti-
mization framework for hyperparameter tuning. pages
443–452.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
ageNet classification with deep convolutional neural
networks. 60(6):84–90.
LeCun, Y., Bengio, Y., and Hinton, G. (2015). Deep learn-
ing. Nature, 521(7553):436–444.
LeCun, Y., Bottou, L., Orr, G. B., and Mller, K.-R. (1998).
Efficient BackProp. In Neural Networks: Tricks of
the Trade, This Book is an Outgrowth of a 1996 NIPS
Workshop, pages 9–50. Springer-Verlag.
Pu, L., Zhang, X., Wei, S., Fan, X., and Xiong, Z. (2016).
Target recognition of 3-d synthetic aperture radar im-
ages via deep belief network. In 2016 CIE Interna-
tional Conference on Radar (RADAR), pages 1–5.
Scherer, D., Mller, A., and Behnke, S. (2010). Evaluation
of Pooling Operations in Convolutional Architectures
for Object Recognition. In Diamantaras, K., Duch,
W., and Iliadis, L. S., editors, Artificial Neural Net-
works ICANN 2010, pages 92–101, Berlin, Heidel-
berg. Springer Berlin Heidelberg.
Schwegmann, C. P., Kleynhans, W., Salmon, B. P.,
Mdakane, L. W., and Meyer, R. G. V. (2016). Very
deep learning for ship discrimination in synthetic
aperture radar imagery. In 2016 IEEE Interna-
tional Geoscience and Remote Sensing Symposium
(IGARSS), pages 104–107.
Smith, L. N. (2017). Cyclical learning rates for training
neural networks.
Thornton, C., Hutter, F., Hoos, H. H., and Leyton-Brown,
K. (2012). Auto-WEKA: Combined selection and
hyperparameter optimization of classification algo-
rithms.
Wang, S., Sun, J., Phillips, P., Zhao, G., and Zhang, Y.-
D. (2017). Polarimetric synthetic aperture radar im-
age segmentation by convolutional neural network us-
ing graphical processing units. DOI: 10.1007/s11554-
017-0717-0.
Plug and Play Deep Convolutional Neural Networks
395
