
Flock Patterns When Pigeons Fly over Terrain with Different
Properties
Margarita Zaleshina
and Alexander Zaleshin
Moscow Institute of Physics and Technology, Moscow, Russia
Keywords: Pigeon Flocks, Spatial Navigation, Collective Motion.
Abstract: The way in which flocks are organized affects the ability of birds to perceive the landscape over which they
fly: if the pattern of the flock changes, then the generalized perception of the terrain over which birds fly
will also change. In this paper the features of dynamic spatial organization of pigeons in a flock during
flights over landscapes with different characteristics were studied based on the analysis of GPS tracks of
birds. The ways of group flight were revealed for typical situations, such as survey of unfamiliar terrain or
flight home from remote sites. The spatial distribution of distances between pairs of individual birds and
directions of movement were calculated, and then related to the features of terrain over which flights were
occurred. The data analysis was performed based on comparison of flock patterns during group flights over
terrain of distinct types (sea coast, urban and countryside terrain, and natural landscape). The spatial data
was processed using the geographic information system QGIS.
1 INTRODUCTION
This paper considers pigeons' collective behaviour
during flight over mixed terrain. The aim of this
work is to reveal the relationship between changes in
flight trajectories and the distribution of birds in the
flock, depending on the terrain over which the flight
takes place. Studying the spatial organization of
birds in the flock reveals features of group
coordination of birds while surveying unfamiliar
terrain, returning home from a remote point,
foraging or migrating over long-distances. It should
be noted that the arrangement of birds in the flock is
directly associated with the terrain over which they
fly. Reflexively, birds adapt their flight in the flock
to the tasks to be solved. Based on the flock
configuration at any moment, assumptions can be
made about the problem solved by the birds.
Flock spatial structure is determined by the
organization of birds within a group, i.e. by their
location relative to each other, and by the direction
of movement of both individual birds and the whole
flock. The individual arrangement of birds changes
dynamically during the flight. However, some
characteristics of the spatial distribution of birds in
the flock can remain steady for long periods of time
– such as typical distances between the birds or
specific flock patterns.
The coordination of bird trajectories is evident in
the adjustment of individual birds to the general
direction of flight. Spatial distribution within the
flock can change the features of aggregate terrain
perception; when changing their distribution
parameters during the flight, birds adapt to the new
tasks to be solved. For example, a high density of
birds in the flock will contribute to multiple
observations of one and the same terrain point; a
flock pattern with large coverage area will allow
simultaneous perception of a large area of terrain. In
flocking, there are sets of options for the
arrangement of birds, which allow their group
observation of visually related elements of the
landscape over which the flight takes place. In
addition, there are options for the arrangement of
birds at nodes and reference points, from which the
birds can observe (as a whole) the boundaries and all
the nearby points on the terrain with similar
attributes. The main parameters of flocks of pigeons
are shown in Figure 1.
In this paper, we calculated basic flight
parameters from records of GPS tracks of different
pigeon flocks: pairwise distances between pigeons,
flight directions of pigeons and standard deviations
for these parameters, measured at the same time. In
334
Zaleshina, M. and Zaleshin, A.
Flock Patterns When Pigeons Fly over Terrain with Different Properties.
DOI: 10.5220/0007255703340341
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 334-341
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

addition, variation in these parameters was
calculated for the intervals +/- 10 seconds.
Figure 1: Main parameters of flock of pigeons: general
flight direction, individual pigeon's flight direction, and
pairwise distance. On the terrain over which the pigeons
fly, it is possible to distinguish surfaces with different
types of coverage, such as forest and ground area, as well
as to select extended objects, such as roads or rivers.
The obtained flight characteristics of the flock were
compared at the moments of flight of the flock over
extended visually perceived elements of the terrain,
such as rivers, roads, and boundaries between
different visually homogeneous textures, which were
identified via remote sensing data from open
sources. The special points that were identified
reflect the relationship between fast events (about a
second) and long-term changes in flight parameters
(about 10 seconds).
Figure 2: Model of the ‘stimulus-reaction’ relationship for
flight of a flock.
It can be assumed that the biological analogue of
such a relationship is a ‘stimulus-response’
phenomenon (Figure 2), where ‘stimulus’ is either
the specific behaviour of the flock or a special event
in the landscape, and the ‘response’ is the variation
in the measured parameters in 10-second interval
before and after the stimulus. The analysis of mean
value and standard deviation (SD) in distances
between pigeons and in flight directions made it
possible to identify the relationships between flock
structures, and to determine the typical response to
external, visually noticeable spatial landmarks.
2 BACKGROUND AND RELATED
WORKS
2.1 Characteristics of Birds during
Their Flight in a Flock
Flying in a flock allows joint, coordinated spatial
migration of birds. The birds gather in flocks to
increase their feeding efficiency or decrease their
vulnerability to predators (Morse, 1977). Besides,
flying in flocks can improve joint spatial orientation
during long-distance migrations and enable more
exact orientation on the terrain. The coordination of
birds during changes in flight direction or height is
apparent in the flock pattern and in the distance
between birds. The joint flight of the flock of birds is
controlled by visual perception and acoustic signals.
In ecology, many types of flock patterns are
described, such as “straight front”, “regiment of
starlings”, “wedge of geese”, and so on.
The structure of pigeon flocks was considered in
paper (Mehlhorn and Rehkaemper, 2016). The
authors remark that pigeons form flocks with a
flexible structure and without any strict hierarchy.
During pigeon migrations both single flights and
flights in pairs as well as in flocks are possible. The
efficiency of flight in the flock differs from that of
individuals or pairs of pigeons, and, on the whole, it
depends on the number of pigeons flying in the
flock.
Research on the behaviour of flocks has been
carried out through analysis of GPS tracks. In
publication (Dell’Ariccia et al., 2008), comparison
of GPS tracks of individual pigeons and pigeons
flying in flocks demonstrated that grouping changes
flock navigational behaviour. Based on investigation
of groups of six pigeons, the authors hold that
‘group cohesion facilitates a shift towards more
efficient homing strategies: individuals prefer
navigating by familiar landmarks, while flocks show
a compass orientation’.
Coordination of birds during flights, including
typical inter-individual distances, has also been
investigated using GPS tracks. Based on this type of
Flock Patterns When Pigeons Fly over Terrain with Different Properties
335

data, birds’ behaviour during circular movement was
investigated for small flocks in publications (Nagy et
al., 2013; Yomosa et al., 2015; Chen et al., 2017). In
publication (Nagy et al., 2013), track data was
recorded using GPS loggers and the leader-follower
relationships in the flock were analysed. In
publication (Chen et al., 2017), it was found out that
pigeons in small flocks coordinate their behaviour
with that of their nearest neighbours, which can
change during the flight. Pigeons can be considered
as flying in a pair if the distance between them is
three to four metres less than the average distance
between pigeons in the flock.
Grouping of birds within the flock was studied in
paper (Ballerini et al., 2008). The authors measured
the three-dimensional positions of individual birds in
compact flocks of up to 2,600 European Starlings
(Sturnus vulgaris) in the field. Based on analysis of
bird flocks flying above Rome, from pictures taken
at an average distance of a hundred metres,
aggregation in the combined flock is maintained
through the formation of multiple groups of seven to
eight birds with a topological interaction.
2.2 Characteristics of the Terrain over
which Pigeons Fly
Visual perception of terrain during the flight of birds
is based on reflexes. During changes in the observed
surroundings, rapid adjustment of the flight
trajectory to the terrain occurs. Importantly, the birds
perceive not individual objects but consolidated data
from the distinct visual elements and attributes of
the terrain. These can include the attributes of
textures, boundaries and distinct areas.
In landscape perception there is a set of visually
connected terrain elements, besides which there is an
opportunity for interpolation between sets of data on
the terrain with similar and dissimilar attributes.
While flying over the terrain it is possible to be
guided by elements with previously known
attributes. Although birds can see places that they
have never seen before, these sites often have
already known characteristics, or are simply part of
an extended area (e.g. road section, river bank, forest
strip). The perceptible elements with well-known
attributes (‘nodes’ or ‘reference points’) dynamically
form the basis for interpolation of spatial data in the
area over which movement of the flock occurs. It
helps orientation both in a situation that is not well
enough known and one in which there is excessive
information.
Multi-scale integration of perception is also
based on the aggregate interpolation of visual
attributes. Distances between flowers, or trees, or
shades can set the different scales for spatial data
generalization. Simplification to single-scale
perception can occur after a reduction from a multi-
scale integration of perception.
2.3 Correlation of Bird Flock Flight
and Terrain Characteristics
The role of visual reference points for pigeons in
getting around terrain is considered in paper (Mann
et al., 2011). The authors have found that the most
informative elements of flight trajectories coincide
with landscape features that have previously been
suggested to form important components of the
homing task.
Perception of the surrounding landscape during
the flight and the influence of landscape on way-
finding and training of pigeons during the flight was
studied in (Guilford and Biro, 2014), and the authors
demonstrated that memorised guidance control is
likely to relate to geocentrically fixed, local features
of the landscape. However, in the case of a familiar
route, the importance of snapping to the reference
points on the terrain may decrease. Nevertheless,
route memorizing depends on the terrain type: ‘birds
follow single memorised routes more readily, or
more faithfully, over some landscape types than
others’.
In publication (Pearce et al., 2014) it was
demonstrated that terrain perception cannot depend
directly on the distribution of pigeons in the flock,
but, for dense flocks, it plays an immediate role in
the joint perception of the terrain. The behaviour of
birds is specific to the density of flock, and
observations of real bird flocks show that a bird
usually reacts to six to seven of its nearest
neighbours.
2.4 Mathematical Simulation of
Behaviour in Flocks
The distribution of directions and, in a similar way,
distribution of velocities can be characterised in a
similar way to spatial distribution, by finding out the
common, regular factors. For each individual, the
spatial characteristics and direction of movement are
determined at a specified moment and compared
with the average parameters of the flock.
A typical mathematic model (‘Boids algorithm’)
of bird behaviour in a flock was suggested by Craig
Reynolds (Reynolds, 1987). Firstly, each bird in the
model aimed to avoid collisions with the other birds.
Secondly, each bird moved in the same direction as
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
336
the nearby birds. Thirdly, each bird aimed to move
at the same distance from other birds. The flock size
is insignificant for the model.
The ‘Vicsek Model’ (Vicsek et al., 1995) is
used to describe large flocks, and demonstrates how
individual birds in the flock adjust their movement
in the presence of noise depending on location of
their neighbours. Allocation of aggregated data is
presented in publication (Topaz, Ziegelmeier and
Halverson, 2015) using simulation snapshots of the
‘Vicsek Model’.
Models for explaining and predicting pigeon
flock flights in real-time mode (‘Pigeon Model’)
were suggested in publication (Wallentin and Oloo,
2016), where the authors used specific algorithms to
identify an optimal range of parameters that can be
used to reproduce realistic navigation paths of
homing pigeons. In (Oloo and Wallentin, 2017) the
authors combined an agent-based model of social
pigeon flights with a simulated data stream from
recorded GPS tracks.
Directions were calculated for individuals in
schools of fish to analyse joint behaviour in
publication (Jolles et al., 2017) based on the
example of free-swimming three-spine stickleback
shoals (Gasterosteus aculeatus).
3 MATERIALS AND METHODS
3.1 Materials
In this work the behaviour of pigeon flocks –
consisting of three to eight birds – during flights
over unfamiliar heterogeneous terrain was studied.
During the investigation, calculations were carried
out based on data on pigeon flights published in
open repositories (Dryad Digital Repository and
Movebank Data Repository). The calculations were
made for six flocks.
The first three flocks (data package from
https://datadryad.org/resource/doi:10.5061/dryad.f9n
8t, paper (Watts et al., 2016)) flew over mixed
terrain near the seashore: sea coast, urban terrain and
agricultural fields. The specific distance between the
individual values of coordinates for pigeon GPS
tracks is presented within the range of three to five
metres. Measurements of coordinates between
separate points of GPS tracks were taken five times
per second. The number of pigeons in the first,
second and third flock were four, five, and three,
respectively.
The other three flocks (data package from
www.datarepository.movebank.org/handle/10255/m
ove.365, paper (Santos et al., 2014)) flew over the
mixed terrain in the foothills: natural forests,
populated countryside and agricultural fields The
specific distance between the individual values of
coordinates for pigeon GPS tracks is presented
within the range of three to six metres.
Measurements of coordinates between individual
points of GPS tracks were taken four times per
second. The number of pigeons in the fourth, fifth
and sixth flock were eight, seven and eight
respectively.
Earth remote sensing data – satellite images – in
the form of OpenLayers (http://openlayers.org) were
applied as a source of information about terrain
surfaces. The coordinate system for the project was
WGS 84/Pseudo-Mercator (EPSG:3857).
3.2 Methods
To determine how the behaviour of each flock
changed – in response to changes in the terrain over
which it flew – pigeon GPS tracks were analysed
and characteristics of the movements of individual
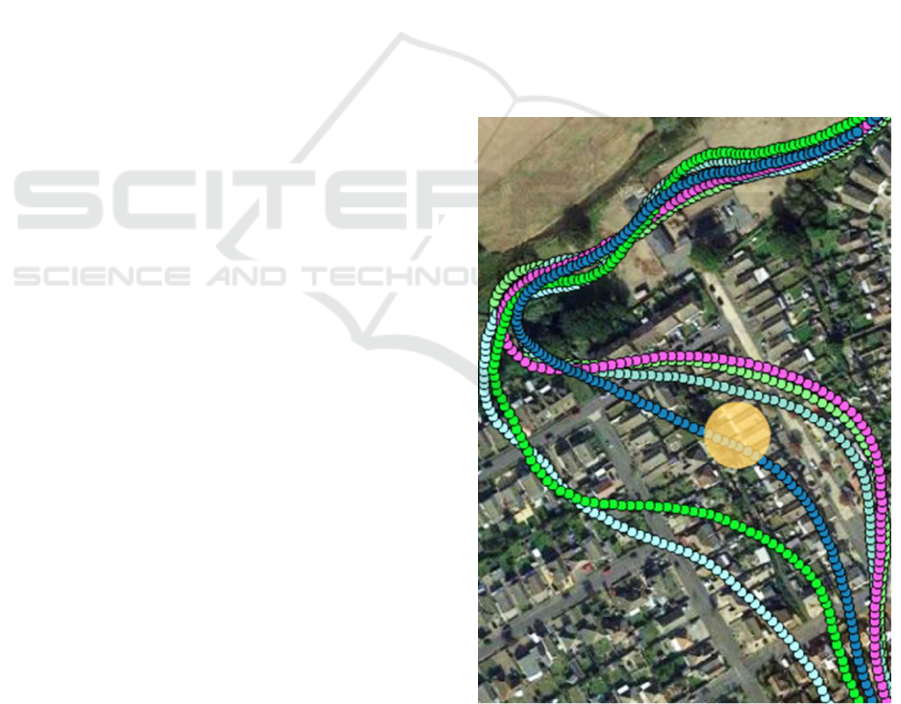
Figure 3: Points at which the flock flew apart, according to
the local maximums of pairwise distances between
pigeons at the same time. Dotted points show the
trajectories of individual pigeons, the circle is a special
point.
Flock Patterns When Pigeons Fly over Terrain with Different Properties
337

birds during their flight in the flock and the
aggregated parameters of the flock were calculated.
The analysis was made for all flight trajectories
for each of the six flocks specified in subsection 3.1
and for all periods of time during which the flights
of these flocks were performed. The distance
between the departure and destination points for all
six flock flights was about ten kilometres.
During analysis the following groups of data
were processed:
I) Analysis of trajectories of individual pigeons,
taking into account their collective behaviour in the
flock during the flight.
Figure 4: Points of breaks in direction (points of sharp
changes in flock direction during one second). Dotted
points show the trajectories of individual pigeons, the
circle is a special point.
The spatial distribution of distances between
pairs of individual birds and directions of movement
were determined during the analysis. The following
parameters were compared to determine:
distance between pairs of individual birds in
the flock and standard deviation of distances
between pairs for all birds in the flock taken at
the same moment of measurement;
directions of movement for each bird and
standard deviation of directions for all birds in
the flock taken at the same moment of
measurement.
Based on analyses of trajectories, special points
in six flock flights were calculated in coordinates
and in time:
points at which the birds in the flock flew
apart, according to the local maximums of
distances between pairs of birds (Figure 3);
points of breaks in direction (points of sharp changes
in flock direction during one second) of the flock
trajectories, i.e. points corresponding to significant
changes in the standard deviation of directions (
Figure 4).
II) Analysis of terrain over which the pigeon
flocks flew
Based on analyses of remote sensing data from
OpenLayers, the spatial locations of the visually
perceived terrain elements were determined. In order
to do this, terrain isolines were contoured along the
boundaries of distinct terrain textures. The isolines
revealed the significant extended objects on the
terrain, as well as the boundaries between territories
with different surface features.
Figure 5: Points of intersection of the flock flight
trajectories and the terrain isolines. Yellow lines indicate
the isolines identified on the surface. Dotted points show
the trajectories of individual pigeons. The circles indicate
special points of intersection.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
338
III) Comparison of characteristics of pigeon
flights and terrain features
Based on analyses of additional special points –
points of intersection of the flock flight trajectories
and the terrain isolines – were determined for
different types of surface (Figure 5).
3.3 QGIS Plugins
The data were processed using the open source
software program QGIS (http://qgis.org), including
additional analysis plugins: QGIS geoalgorithms and
GDAL tools (http://www.gdal.org) integrated into
QGIS. The source data layers were added using the
OpenLayers Plugin in QGIS, which allows to obtain
Google Maps, Bing Maps and another open layers.
Geographic information system QGIS allow to
process GPS data of the pigeons’ flight paths with
precise reference to the locations and terrain features:
Create vector track lines by points of GPS
measurements.
Calculate variation in directions of motion and
variation in distances by vector data.
Build summary diagrams of the dependence of
different flight parameters with reference to
time and to coordinates along the flight
trajectories.
Calculate the terrain features obtained from
remote sensing data, such as the boundaries
between different types of terrain, and select
contour isolines.
Calculate the density of special lines on the
surface in the form of a ‘heat map’.
The applied QGIS tools and plugins are
presented in Table 1.
Table 1: Applied QGIS tools and external plugins.
Plugin
Description
OpenLayers Plugin:
https://github.com/so
urcepole/qgis-
openlayers-plugin
QGIS plugin embeds OpenLayers
(http://openlayers.org)
functionality.
It allows to obtain Google Maps,
Bing Maps, OpenStreetMap and
another open source layers.
Points2One:
http://plugins.qgis.or
g/plugins/points2one
Create lines and polygons from
vertices. Connects points in a
layer to form lines and polygons.
Line intersections:
https://www.qgis.org/
en/docs/index.html
Locate intersections between
lines, and output results as a point
shapefile.
Heatmap Plugin:
http://www.qgistutori
als.com/en/docs/creat
ing_heatmaps.html
Create a density raster of an input
point vector layer based on the
number of points in a location,
with larger numbers of clustered
points resulting in larger values.
4 RESULTS
In this work three types of special points were
calculated (points at which the birds in the flock
flew apart, points of breaks in direction with sharp
changes in flock direction during one second, points
of intersection of flock flight trajectories and terrain
isolines) for the flights of six flocks using three
different methods.
Based on special points, peri-stimulus
histograms were forming as histogram of flight
parameters around stimulus events – ‘triggers’. Peri-
stimulus histograms were plotted for: directions,
distances and deviations by direction and distances,
as well as detection of dependencies between flock
flight parameters and terrain properties. Peri-
stimulus histograms were constructed (using 200 or
250 ms bins) for the epoch between 10 seconds
before passing over a special point and 10 seconds
after passing over a special point (‘trigger
stimulus’). Typical phenomena occurring during the
flights of the flocks were analysed for points where:
individual birds flew apart;
there was sharp changes in flock direction;
trajectories of pigeons crossed selected
isolines.
Basic flight parameters and calculated results are
presented in Table 2 (SD - standard deviation).
Table 2: Basic flight parameters and calculated results.
Dryad Digital Repository
Flock number
1
2
3
Number of pigeons
4
5
3
Time interval between GPS
measurements, ms
200
200
200
Number of GPS
measurements
5395
3685
480
0
Mean SD of pairwise
distances, m
10.8
9.4
8.6
Mean SD of flight directions,
degrees
5.8
5.6
5.5
Isoline contour accuracy, m
5
5
5
Movebank Data Repository
Flock number
4
5
6
Number of pigeons
8
7
8
Time interval between GPS
measurements, ms
250
250
250
Number of GPS
measurements
3501
3501
384
4
Mean SD of pairwise
distances, m
3.8
3.8
6.8
Mean SD of flight directions,
degrees
3.9
4.0
4.2
Isoline contour accuracy, m
5
5
5
Flock Patterns When Pigeons Fly over Terrain with Different Properties
339
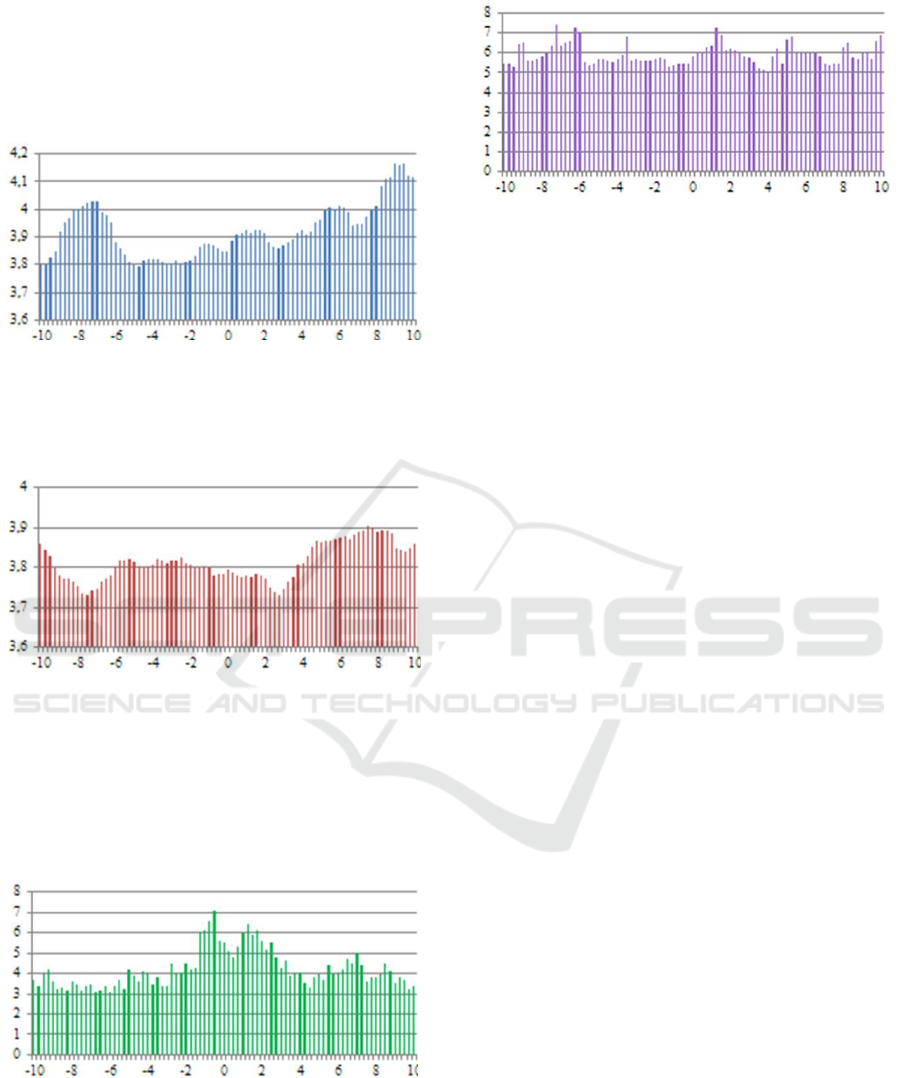
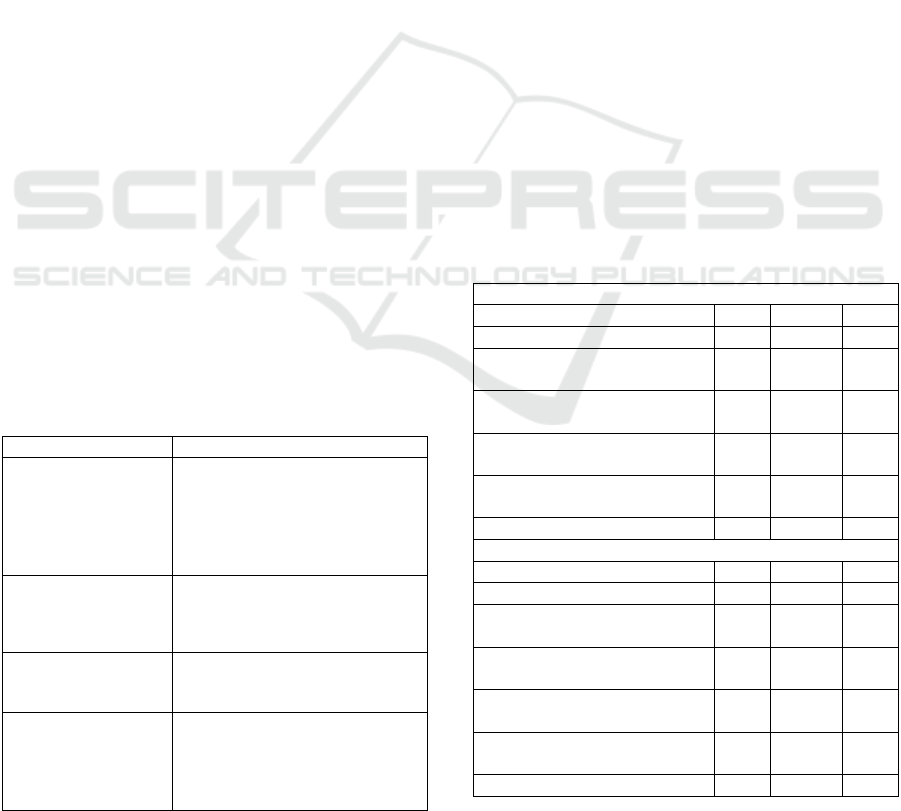
The typical histograms for the different cases are
shown in the Figures below.
4.1 Results of Data Processing by
Distance
Figure 6: Histogram of distance deviations, in relation to
the moments when the flock crossed the isolines. The x
axis shows the timescale in relation to events ‘isoline’, s.
The y axis shows standard deviation of the distances
between pairs of pigeons, m.
Figure 7: Histogram of distance deviations, in relation to
the moments of break in flock direction. The x axis shows
the timescale in relation to events ‘breakpoint’, s. The y
axis shows standard deviation of the distances between
pair of pigeons, m.
4.2 Results of Data Processing by
Directions
Figure 8: Histogram of direction deviations, in relation to
the moment at which the flock flew apart. The x axis
shows the timescale in relation to events ‘flock flying
apart’, s. The y axis shows standard deviation of the
direction of pigeons, deg.
Figure 9: Histogram of direction deviations, in relation to
the moments when the flock crossed the isolines. The x
axis shows the timescale in relation to events ‘isoline’, s.
The y axis shows standard deviation of the direction of
pigeons, deg.
5 DISCUSSION AND
CONCLUSIONS
The aim of this work was to reveal the flight
properties of a small flock (three to eight
indistinguishable pigeons tracked using GPS
loggers) over homogeneous and combined
homogeneous and heterogeneous terrain. The paper
discusses typical flock behaviour related to specifics
of the terrain over which birds fly. Specific features
of the flight, revealed during turns of the flock, and
changes in the terrain colour characteristics or
lighting condition in landscape, presented the
principle interest for this study.
Reflexively, the pigeons arrange themselves
within the flock over the terrain. Moreover, part of
visual data about landscape, perceived by the
pigeons, forms the basic points and areas that
determine both continuity and change in pigeon
trajectories during flights (flight along the river
maintains consistency of trajectories, and flying out
of the forest into the fields can cause the flock to
turn around). With that, other visual data may be not
perceived as significant for navigation during the
flight (for example, a particular house among the
abundance of single houses in low-rise built-up
area), in such case no behavioural response is
associated with changing trajectories.
The pigeons can fly over heterogeneous and
homogeneous terrain. The scope of navigation tasks
solved by the pigeons when flying over
homogeneous terrain with a small number of
reference points is also limited and generally stable.
The arrangement of pigeons in the flock and their
flight trajectories will be maintained during the
whole flight over homogeneous terrain. The pigeons
pay attention to a limited and fixed number of
objects – for example, the river bank along which
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
340

the flight occurs. Repetition of terrain textures and
structures enables stable behaviour and does not
require additional attention of pigeons. Any changes
or additional information – changes in weather
conditions or light, or the appearance of a predator –
may result in changes in the pigeons’ arrangement in
the flock and trajectories. In contrast to individual
birds, the flock perceives the terrain jointly and in
coordination and responds to changes in terrain
cooperatively – with changes not only in trajectories
but also in the flock structure itself.
During a flight over heterogeneous terrain, a
great amount of diverse information is observed.
This information can be generalized and become
typical. Sets of data are extracted from it and can be
applied even when the birds have become
accustomed to operating in other situations.
Accordingly, the responses to similar sets of data
will be alike. This promotes both fast and consistent
responses during flight over similar terrain and
adaptation during flight over different terrain. When
current situation change, the sets of reference points
and regions also change.
Generally, pigeons prefer to fly over already
familiar terrain, gradually extending the survey
areas. But even well-known territories can change –
at different times of day and seasons of the year –
and therefore flock navigational strategies can
change completely, and the flock can even fly away
from previously interesting terrain.
REFERENCES
Ballerini, M. et al. (2008) ‘Interaction ruling animal
collective behavior depends on topological rather than
metric distance: Evidence from a field study’,
Proceedings of the National Academy of Sciences,
105(4), pp. 1232–1237.
Chen, D. et al. (2017) ‘Anisotropic interaction rules in
circular motions of pigeon flocks: An empirical study
based on sparse Bayesian learning’, Physical Review
E, 96(2), p. 022411.
Dell’Ariccia, G. et al. (2008) ‘Flock flying improves
pigeons’ homing: GPS track analysis of individual
flyers versus small groups’, Animal Behaviour.
Academic Press, 76(4), pp. 1165–1172.
Guilford, T. and Biro, D. (2014) ‘Route following and the
pigeon’s familiar area map’, Journal of Experimental
Biology, 217(2), pp. 169–179.
Jolles, J. W. et al. (2017) ‘Consistent Individual
Differences Drive Collective Behavior and Group
Functioning of Schooling Fish’, Current Biology.
Elsevier Ltd., 27(18), p. 2862–2868.e7.
Mann, R. et al. (2011) ‘Objectively identifying landmark
use and predicting flight trajectories of the homing
pigeon using Gaussian processes’, Journal of The
Royal Society Interface, 8(55), pp. 210–219.
Mehlhorn, J. and Rehkaemper, G. (2016) ‘The Influence
of Social Parameters on the Homing Behavior of
Pigeons’, PLOS ONE. Edited by V. P. Bingman,
11(11), p. e0166572.
Morse, D. H. (1977) ‘Feeding Behavior and Predator
Avoidance in Heterospecific Groups’, BioScience.
[American Institute of Biological Sciences, Oxford
University Press], 27(5), pp. 332–339.
Nagy, M. et al. (2013) ‘Context-dependent hierarchies in
pigeons’, Proceedings of the National Academy of
Sciences, 110(32), pp. 13049–13054.
Oloo, F. and Wallentin, G. (2017) ‘An Adaptive Agent-
Based Model of Homing Pigeons: A Genetic
Algorithm Approach’, ISPRS International Journal of
Geo-Information, 6(1), p. 27.
Pearce, D. J. G. et al. (2014) ‘Role of projection in the
control of bird flocks’, Proceedings of the National
Academy of Sciences, 111(29), pp. 10422–10426.
Reynolds, C. W. (1987) ‘Flocks, herds and schools: A
distributed behavioral model’, ACM SIGGRAPH
Computer Graphics, 21(4), pp. 25–34.
Santos, C. D. et al. (2014) ‘Temporal and contextual
consistency of leadership in homing pigeon flocks’,
PLoS ONE. Edited by G. G. de Polavieja, 9(7), p.
e102771.
Topaz, C. M., Ziegelmeier, L. and Halverson, T. (2015)
‘Topological Data Analysis of Biological Aggregation
Models’, PLOS ONE. Edited by B. Ermentrout, 10(5),
p. e0126383.
Vicsek, T. et al. (1995) ‘Novel Type of Phase Transition
in a System of Self-Driven Particles’, Physical Review
Letters, 75(6), pp. 1226–1229.
Wallentin, G. and Oloo, F. (2016) ‘A model-sensor
framework to predict homing pigeon flights in real
time’, GI_Forum, 1, pp. 41–52.
Watts, I. et al. (2016) ‘Lack of experience-based
stratification in homing pigeon leadership hierarchies’,
Royal Society Open Science, 3(1), p. 150518.
Yomosa, M. et al. (2015) ‘Coordinated Behaviour in
Pigeon Flocks’, PLOS ONE. Edited by C. K.
Hemelrijk, 10(10), p. e0140558.
Flock Patterns When Pigeons Fly over Terrain with Different Properties
341
