
Fast Non-minimal Solvers for Planar Motion Compatible Homographies
Marcus Valtonen
¨
Ornhag
Centre for Mathematical Sciences, Lund University, Lund, Sweden
Keywords:
Planar Motion, Homography, Polynomial Solver, Trajectory Recovery, Visual Odometry.
Abstract:
This paper presents a novel polynomial constraint for homographies compatible with the general planar motion
model. In this setting, compatible homographies have five degrees of freedom—instead of the general case of
eight degrees of freedom—and, as a consequence, a minimal solver requires 2.5 point correspondences. The
existing minimal solver, however, is computationally expensive, and we propose using non-minimal solvers,
which significantly reduces the execution time of obtaining a compatible homography, with accuracy and
robustness comparable to that of the minimal solver. The proposed solvers are compared with the minimal
solver and the traditional 4-point solver on synthetic and real data, and demonstrate good performance, in terms
of speed and accuracy. By decomposing the homographies obtained from the different methods, it is shown
that the proposed solvers have future potential to be incorporated in a complete Simultaneous Localization and
Mapping (SLAM) framework.
1 INTRODUCTION
Polynomial systems of equations naturally arise in the
field of computer vision, as an instrument of encoding
geometric properties and other constraints one wishes
to impose on the desired output. To solve a gen-
eral system of polynomial equations, is, however, a
task requiring certain endeavour, in order to produce
a solver that is sufficiently fast and numerically stable.
In this paper we will investigate methods for Vi-
sual Odometry (VO), where the expected input is a
sequence of images from a camera mounted on a
mobile platform. The goal is to estimate the ego-
motion of the platform, in indoor environments or
other challenging scenes containing planar surfaces.
This is done by considering homography based meth-
ods, where we enforce the general planar motion
model. By imposing these constraints, thus lowering
the total degrees of freedom of the motion parameters,
it is possible to navigate robustly in scenes contain-
ing planar structures, which are problematic for VO
systems where a general structure of the scene is as-
sumed. It does, however, introduce a number of non-
trivial polynomial constraints, and a proper frame-
work for dealing with them must be employed.
The major contributions are:
i. To derive a new polynomial constraint for the gen-
eral planar motion model, and show that this, to-
gether with known constraints, are sufficient con-
ditions for compatibility.
ii. To develop a series of non-minimal solvers to en-
force a weaker form of the general planar mo-
tion model, with a similar accuracy as the existing
minimal solver, at a greatly reduced speed.
iii. To demonstrate that pre-optimization on an early
stage in the intended VO pipeline, by enforcing
the general planar motion model on the homogra-
phies (but not a sequence of homographies), do
not necessarily give an increased performance.
2 RELATED WORK
Planar motion models with different complexity have
been considered to increase robustness of navigation
systems, by decreasing the total number of parameters
to be recovered. In (Ort
´
ın and Montiel, 2001) a mo-
bile platform with a single camera was considered,
where the optical axis was parallel to the floor. This
made it possible to parameterize the essential matrix
by imposing a planar motion model with two transla-
tional components and a single rotational component.
They propose a linear 3-point algorithm and a non-
linear 2-point algorithm; however, only the direction
of the translation can be recovered using their method.
Furthermore, the alignment of the optical axis with
the floor is not feasible for real-life applications. The
same geometrical setup was considered in (Chen and
Liu, 2006), but the algorithm was extended to stereo
vision.
40
Örnhag, M.
Fast Non-minimal Solvers for Planar Motion Compatible Homographies.
DOI: 10.5220/0007258600400051
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 40-51
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The fundamental matrix (or the essential matrix
in the calibrated case) have been successfully used in
many computer vision and robotics applications. De-
spite many promising navigation systems for general
scenes, such methods will not work well under pla-
nar motion, as it is known to be ill-conditioned (Hart-
ley and Zisserman, 2004; Torr et al., 1998). As
planar structures are common in man-made environ-
ments, researchers have considered alternative meth-
ods, many of which are based on inter-image homo-
graphies.
In (Hajjdiab and Lagani
`
ere, 2004) a planar mo-
tion model with one tilt parameter was considered,
and they proposed a method for estimating all mo-
tion parameters. By allowing an arbitrary tilt about
the floor normal Liang and Pears showed that the
eigenvalues of the homography matrix is related to
the rotation of the mobile platform, regardless of the
tilt (Liang and Pears, 2002). Their method, however,
did not estimate the tilt parameters.
The method proposed in (Wadenb
¨
ack and Heyden,
2013; Wadenb
¨
ack and Heyden, 2014) estimates the
full set of motion parameters for the general planar
motion model with five degrees of freedom by de-
coupling the overhead tilt using an iterative scheme.
From the same model assumption, but employing a
dense matching scheme, Zienkiewicz and Davison
devise a non-linear optimization scheme for the full
set of motion parameters (Zienkiewicz and Davison,
2015).
Without enforcing any model constraints, a gen-
eral homography has eight degrees of freedom; how-
ever, a homography compatible with the general
planar motion model only has five, as it is deter-
mined (up to scale) by the motion parameters. Due
to the automated process of extracting and match-
ing keypoints, homography solvers often employ
RANSAC, or similar frameworks, to reject outliers.
The number of iterations N required to select a set
of keypoints only containing inliers is dependent
on the size of the subset of keypoints n, the de-
sired probability p and inlier ratio w, by the well-
known relation N = log(1 − p)/log(1 − w
n
) (Fischler
and Bolles, 1981). One way of increasing the speed
of such an algorithm is to reduce the necessary num-
ber of iterations, i.e. to create a solver that only uses
the minimal number of point correspondences needed
for the application. Such a solver is known as a min-
imal solver. In line with this argument, it is natural
to consider a minimal homography solver compatible
with the planar motion model, which has been con-
structed in (Wadenb
¨
ack et al., 2016). They parame-
terize the homography as a linear combination of the
basis elements of the null space of the corresponding
DLT system, with 2.5 DLT constraints, and construct
eleven quartic constraints on the homography matrix,
which results in a system of eleven quartic equations
in three variables. By generating the corresponding
ideal, a basis for the quotient space can be constructed
and the original problem solved by employing the ac-
tion matrix method (M
¨
oller and Stetter, 1995). Their
derivation involves steps of manual selection of basis
monomials, which is a time-consuming task.
In (Kukelova et al., 2008) an automatic genera-
tor for polynomial systems was introduced, and sev-
eral improvements have been made in recent years
to increase the performance, see e.g. (Larsson and
˚
Astr
¨
om, 2016; Larsson et al., 2017a; Larsson et al.,
2017b; Larsson et al., 2018b). Such methods have
been successfully used in several computer vision ap-
plications, e.g. (Ventura et al., 2014; Zheng et al.,
2013).
Minimal solvers permit intrinsic constraints to be
enforced on the solutions, while minimizing the num-
ber of necessary iterations in a RANSAC framework;
however, there are cases when the minimal solvers are
sensitive to noise, see e.g. (Triggs, 1991), or when the
complexity of minimal solver is large, thus making it
very slow, see e.g. (Larsson et al., 2018a). Under such
circumstances constructing a non-minimal solver is a
viable option.
3 PLANAR MOTION
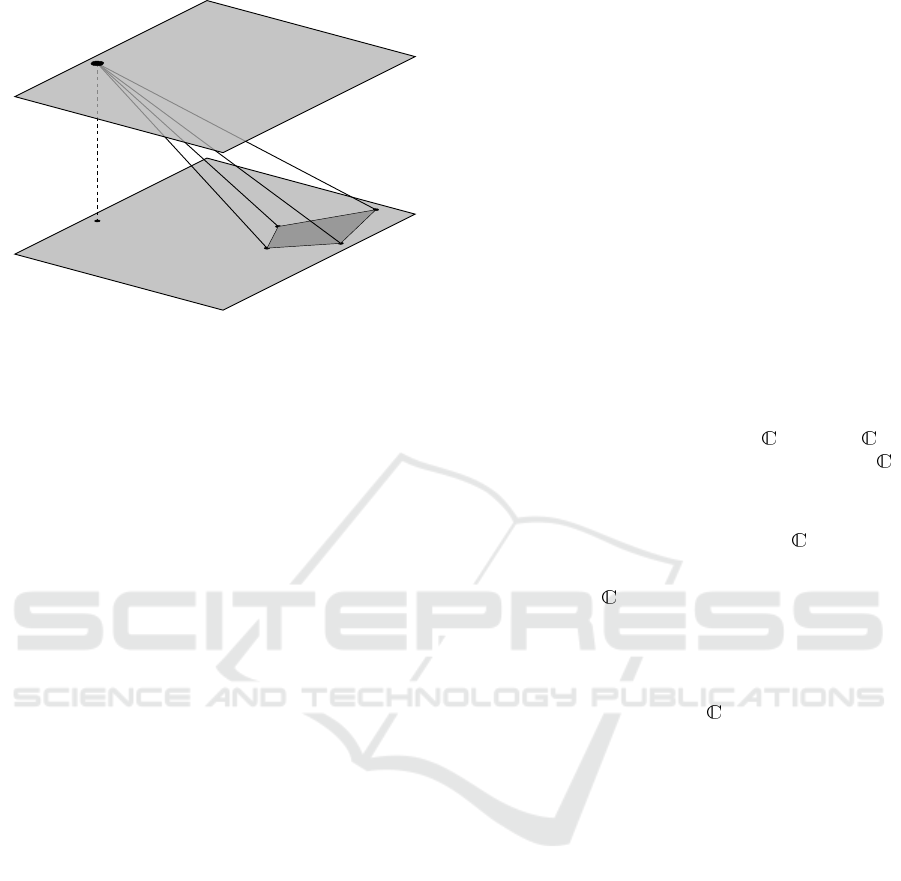
3.1 Problem Geometry
In this paper we consider a mobile platform with a sin-
gle camera directed towards the floor. The world co-
ordinate system is chosen such that the camera moves
in the plane z = 0. The scale is fixed by assuming
the ground plane is positioned at z = 1, which is illus-
trated in Figure. 1.
We employ the parameterization used
in (Wadenb
¨
ack and Heyden, 2013), where the
camera matrices for two consecutive poses A and B,
are given by
P
P
P
A
= R
R
R
ψθ
[I
I
I | 0
0
0],
P
P
P
B
= R
R
R
ψθ
R
R
R
φ
[I
I
I | −t
t
t],
(1)
where R
R
R
ψθ
is a rotation θ about the y-axis followed
by a rotation ψ about the x-axis. As the mobile plat-
form rotates about the plane normal (or z-axis) the
angle φ varies, corresponding to R
R
R
φ
. The translation
of the mobile platform is modelled by a translation
vector t
t
t = (t
x
, t
y
, 0)
T
. It follows that the inter-image
homography is given by
H
H
H ∼ R
R
R
ψθ
R
R
R
φ
T
T
T
t
t
t
R
R
R
T
ψθ
, (2)
Fast Non-minimal Solvers for Planar Motion Compatible Homographies
41
z = 1
plane normal
z = 0
Figure 1: The problem geometry considered in this paper.
The camera moves in the plane z = 0, and is tilted about the
y-axis an unknown angle θ, followed by a rotation about the
x-axis by an unknown angle ψ, The ground floor is posi-
tioned at z = 1.
where T
T
T
t
t
t
= I
I
I − t
t
tn
n
n
T
is the translation matrix corre-
sponding to the translation t
t
t, and n
n
n = (0, 0, 1)
T
is a
floor normal. The homography matrix can be made
unique by imposing detH
H
H = 1, which will be assumed
throughout the paper.
3.2 Parameter Recovery
In (Wadenb
¨
ack and Heyden, 2013) an algorithm for
recovering the full set of motion parameters for the
general planar motion model was suggested. Their
approach is to separate the overhead tilt R
R
R
ψθ
from the
nonconstant motion parameters. This can be achieved
using a coordinate-descent like optimization scheme,
where one of the tilt angles are fixed and the other is
solved for. A more robust version by the same authors
was introduced in (Wadenb
¨
ack and Heyden, 2014) by
using more than one homography, and incorporating
the assumption of a fixed overhead tilt throughout the
entire trajectory of the mobile platform.
4 COMPATIBLE
HOMOGRAPHIES
The Direct Linear Transform (DLT) equations for
a pair of point correspondences x
x
x ↔
ˆ
x
x
x, where
x
x
x = (x, y, 1)
T
and
ˆ
x
x
x = (ˆx, ˆy, 1)
T
is given by
0
0
0 −x
x
x
T
ˆyx
x
x
T
x
x
x
T
0
0
0 − ˆxx
x
x
T
− ˆyx
x
x
T
ˆxx
x
x
T
0
0
0
h
h
h
1
h
h
h
2
h
h
h
3
= 0
0
0, (3)
where h
h
h
T
k
is the k:th row of the homography matrix H
H
H.
It is only necessary to consider the first two rows of
the DLT system matrix in (3), as the third is a lin-
ear combination of the others. We will use these
equations to parameterize the null space of the homo-
graphy matrix H
H
H in Section 6.
We will introduce some notation from algebraic
geometry in order to outline the method employed to
create the polynomial solvers we will consider in this
paper.
4.1 The Action Matrix Method
Consider a polynomial system of equations
f
1
(x
x
x) = 0,
.
.
.
f
s
(x
x
x) = 0 .
(4)
The set of all solutions to (4), is known as an affine
variety, and denoted V
V
V ( f
1
,..., f
s
) ⊂ [x
x
x], where [x
x
x]
is the set of polynomials in x
x
x with coefficients in .
The ideal generated by f
1
,..., f
s
, is denoted
h f
1
,..., f
s
i =
(
s
∑
i=1
h
i
f
i
: h
1
,..., h
s
∈ [x
x
x]
)
. (5)
Every ideal of [x
x
x] is finitely generated, thus, the
polynomial system of equations (4) is defined by the
generated ideal.
Under the assumption that the system has finitely
many solutions, I = h f
1
,..., f
s
i is zero-dimensional
and the quotient space A = [x
x
x]/I is finite dimen-
sional (Cox et al., 2005). Let [ f ] = { f +h | h ∈ I} de-
note the coset and consider the operator T
f
: A −→ A,
defined by T
f
([g]) = [ f g]. Since the quotient space A
is finite-dimensional this operation can be represented
by a matrix M
M
M
f
, which is known as the action matrix.
Furthermore, select a monomial basis for A, which we
denote B = {[x
x
x
α
j
]}
j∈J
. Typically, such a basis is ob-
tained by using an improved version of Buchberger’s
algorithm. When the action matrix M
M
M
f
= (m
i j
) acts
on the basis elements a linear combination of the
monomials forming the basis is obtained,
T
f
([x
x
x
α
j
]) = [ f x
x
x
α
j
] =
∑
i∈J
m
i j
[x
x
x
α
i
] . (6)
Consequently, for x
x
x ∈ V (I),
f (x
x
x)x
x
x
α
j
=
∑
i∈J
m
i j
x
x
x
α
i
. (7)
The basis B may be represented by a vector b
b
b, and
since that (7) must hold for all basis elements, the
problem can be reduced to an eigenvalue problem,
given by
f (x
x
x)b
b
b(x
x
x) = M
M
M
T
f
b
b
b(x
x
x) . (8)
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
42

By multiplying (4) by a set of monomials an
equivalent, but larger problem is obtained. The prob-
lem of finding a suitable monomial basis remains,
and there is no exact criterion for doing so; how-
ever, it is desirable to find the minimal set of mono-
mials to make the problem solvable (or numerically
stable). The coefficient matrix of the expanded ma-
trix is known as an elimination template, and numer-
ous attempts of optimizing these have been made,
see e.g. (Kukelova et al., 2008; Larsson and
˚
Astr
¨
om,
2016; Larsson et al., 2017b; Larsson et al., 2018b).
4.2 Necessary Conditions
In (Wadenb
¨
ack et al., 2016) eleven quartic constraints
for planar motion compatible homographies were de-
rived, and used to create a minimal solver. These con-
straints were experimentally obtained by randomly
generating points on the manifold defining the planar
motion compatible homographies. In order to be able
to work over a finite field, the rotation matrices were
constructed using Pythagorean triplets, hence integer
versions of the problem were obtained. By doing so,
the coefficients for the polynomials could be found.
With this approach, however, one cannot rule out the
existence of higher order polynomials, and thus, suf-
ficiency cannot be proven. We will approach this dif-
ferently in the next Section.
5 SUFFICIENT CONDITIONS
In this section, we will show that the eleven quartic
constraints discussed in Section 4.2 are necessary but
not sufficient. Furthermore, we show that by adding
a sixth degree polynomial to the existing quartic con-
straints one may guarantee sufficiency. This is done
by a novel parameterization, which allows one to ef-
ficiently compute the relevant elimination ideal.
Instead of considering the original camera ma-
trices (1), choose the coordinate system such that
P
P
P
A
= [I
I
I |0
0
0], giving P
P
P
B
= [R
R
R
n
n
n
(φ)| − t
t
t]. This can be
thought of as travelling parallel to an unknown plane,
as is illustrated in Figure 2, hence the homography
can be parameterized as
H
H
H = R
R
R
n
n
n
(φ) + t
t
tn
n
n
T
, (9)
where t
t
t = (t
x
, t
y
, t
z
)
T
is a translation vector orthogo-
nal to the plane normal n
n
n = (n
x
, n
y
, n
z
)
T
. The con-
straint of travelling parallel to the plane can be ex-
pressed as t
t
t · n
n
n = 0 and, to fix the scale, one may as-
sume that kn
n
nk
2
= 1.
Let q
q
q = (1, q
x
, q
y
, q
z
) be a unit quaternion,
then n
n
n = (q
x
, q
y
, q
z
) and the corresponding rota-
n = (n
x
, n
y
, n
z
)
t · n = 0
knk
2
= 1
t = (t
x
, t
y
, t
z
)
Figure 2: Revised problem geometry. The camera moves
parallel to an unknown plane defined by a normal vector n
n
n
of unit length.
tion matrix R
R
R = R
R
R(q
q
q). Let the ideal generated by
λH
H
H −R
R
R(q
q
q) − t
t
tn
n
n
T
= 0 and t
t
t · n
n
n = 0 be denoted I, then
we seek the elimination ideal I ∩ [H
H
H], for some
suitable field . Over a finite field, this can be
done using Macaulay2 (Grayson and Stillman, 2018).
This results in the eleven quartic constraints found
in (Wadenb
¨
ack et al., 2016) and an additional sixth
degree polynomial
1
. The constraints were symboli-
cally verified to hold over as well.
6 NON-MINIMAL SOLVERS
In this section we consider different non-minimal
solvers as an alternative to the minimal solver pro-
posed in (Wadenb
¨
ack et al., 2016). The main reason
we consider such solvers is due to the minimal solver
being computationally expensive. Also, there is no
advantage between a 2.5-point solver and a 3-point
solver, in terms of the number of iterations required to
select a subset of inliers with a certain probability—
this is a favourable trait, compared to the standard 4-
point DLT solver. Furthermore, we would like to ex-
plore different methods using the novel sixth degree
polynomial, derived in Section 5. Lastly, and most
importantly for practical applications, the condition
that the overhead tilt remains constant is not enforced
by using any of the described method, but is achieved
at a later step in the VO pipeline. Therefore, it is un-
certain if pre-optimizing the homographies will yield
a better end result.
In this paper we construct four different non-
minimal solvers
3pt(4+4) a 3-point solver enforcing two quartic
1
See the Appendix for implementation details.
Fast Non-minimal Solvers for Planar Motion Compatible Homographies
43
10
−3
10
−2.5
10
−2
10
−1.5
10
−1
10
−0.5
10
−3
10
−1
10
1
σ
N
kH −
ˆ
Hk
F
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
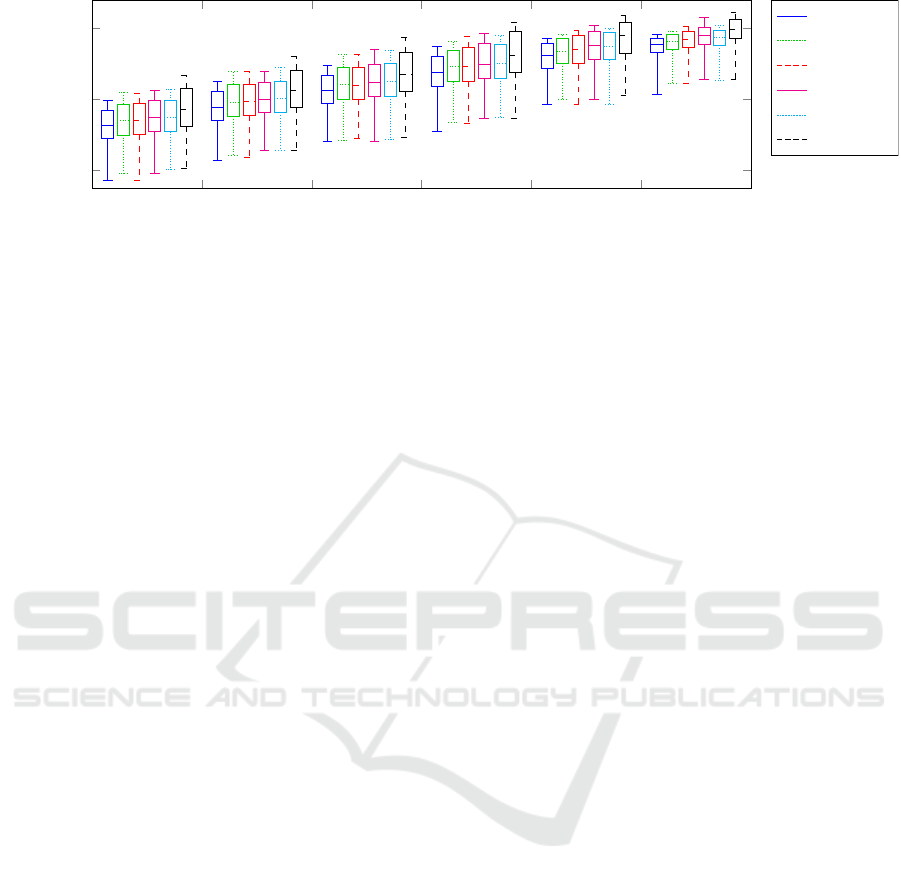
Figure 3: Distribution of homography error in the Frobenius norm for different noise levels σ
N
. The proposed non-minimal
solvers have a median error between the 2.5-point solver and DLT for all noise levels considered in the experiment.
constraints,
3pt(4+6) a 3-point solver enforcing one quartic
constraint and the sextic constraint,
3.5pt(4) a 3.5-point solver enforcing one quartic
constraint,
3.5pt(6) a 3.5-point solver enforcing the sextic
constraint.
These solvers were chosen because they enforce a
weaker version of the general planar motion model
in different ways. Furthermore, we will compare
with the minimal solver and the standard 4-point DLT
solver.
From the eleven quartic constraints the first two
w.r.t. DEGLEX was chosen to construct the solvers;
however, this was only chosen for reproducibility, as
empirical tests showed that the size of the elimina-
tion template did not change by considering other
pairs. Similarly, when constructing the 3pt(4+6) and
3.5pt(4) solvers only the first quartic constraint was
chosen.
6.1 Parameterizing the Null Space
The standard approach, which we will utilize, is to
parameterize the null space, and use the parameter-
ization to obtain the desired polynomial system of
equations. Using three DLT constraints (3) the homo-
graphy matrix H
H
H has a 3-dimensional null space,
hence can be parameterized as
H
H
H(z
z
z) = H
H
H
0
+ z
1
H
H
H
1
+ z
2
H
H
H
2
. (10)
Similarly, for the 3.5-point solvers, the null space is
two-dimensional, leaving a single variable. For such
systems, the action matrix method is replaced with a
simpler root finding algorithm, involving the compan-
ion matrix (Trefethen and Bau, 1997). In both cases
this allow the homography to be written as a func-
tion H
H
H = H
H
H(z
z
z), and inserted to any of the polyno-
mial constraints f
i
, yields an equation f
i
(H
H
H(z
z
z)) = 0
in the variable z
z
z. For the 3-point solvers a system
of two equations are obtained, and the corresponding
ideal I = h f
1
, f
2
i can be studied. The number of basis
elements in the quotient space determines the number
of solutions (for non-degenerate configurations).
For the 3pt(4+4) solver the basis consists of 16
elements, hence the polynomial system of equations
has at most 16 solution. By using the automatic gen-
erator proposed by (Larsson et al., 2017a) an elimina-
tion template of size 20 × 36 was constructed. Due to
the increased complexity of the sextic constraint the
3pt(4+6) solver has in general 24 solutions, and the
corresponding elimination template is of size 31 × 55.
Furthermore, the coefficients in the elimination tem-
plate are significantly more complex.
7 EXPERIMENTS
7.1 Noise Sensitivity
In order to be comparable with the study of
noise sensitivity for the minimal solver proposed
in (Wadenb
¨
ack et al., 2016), the same setup was used.
Homographies H
H
H
j
compatible with the general planar
motion model were generated together with randomly
generated keypoints x
x
x
k
with zero mean and unit vari-
ance. The image correspondences
ˆ
x
x
x
k
∼ H
H
H
j
x
x
x
k
were
computed and normalized to unit variance. To sim-
ulate noise, a normal distributed term was added to
x
x
x
k
and
ˆ
x
x
x
k
with standard deviation σ
N
. The homogra-
phies obtained from the solvers were normalized such
that det H
H
H
j
= 1, and the error measured in the Frobe-
nius norm of the difference between the ground truth
and the estimated homographies, see Figure 3. The
median sensitivity to noise of the proposed solvers
is between the corresponding values for the 2.5-point
solver and the 4-point (DLT) solver for all noise lev-
els, which indicates a trade-off between accuracy and
speed.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
44
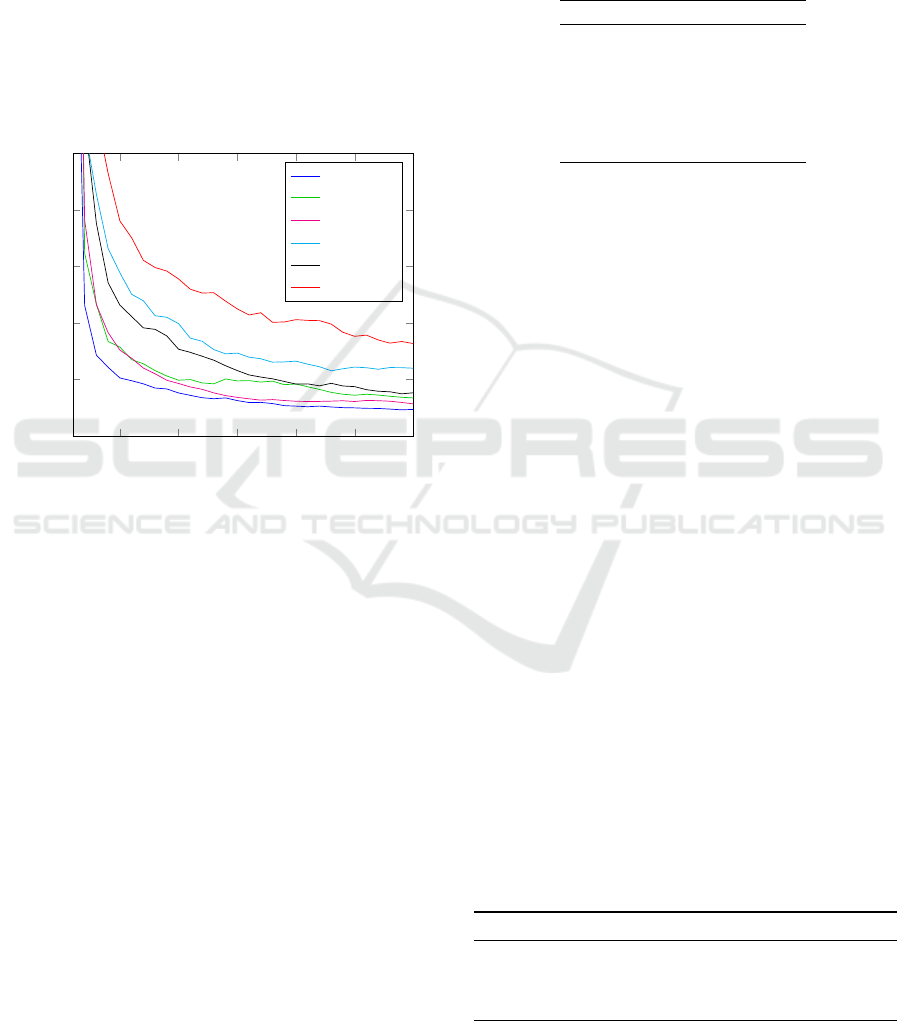
Secondly, we generate a sequence of homogra-
phies compatible with the general planar motion
model, and use the method described in Section 3.2
to recover the motion parameters. For this example
the noise level was kept constant while increasing the
number of homographies used to estimate the motion
parameters. For σ
N
= 10
−2
the results are shown in
Figure 4. The results for the other motion parameters,
and different standard deviation σ
N
follow the same
trend, and can be found in the Appendix. Note, that
the mean error for the 3-point solvers are close to the
minimal solver after approximately 15 homographies
are used.
5 10 15 20 25 30
0.00
0.05
0.10
0.15
0.20
0.25
Number of homographies
Mean error ψ
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
Figure 4: Mean error for ψ (in degrees) for 100 iterations.
7.2 Speed Evaluation
The solvers were implemented in MATLAB, with
mex-compiled C++ routines. For a fair comparison,
the 2.5-point method and the 4-point (DLT) method
were also constructed this way. The 2.5-point method
was generated using the automatic solver by Lars-
son et al. (Larsson et al., 2017a), thus producing a
different elimination template than the one proposed
in (Wadenb
¨
ack et al., 2016).
The execution time of the solvers was tested on
a standard laptop computer, and the measurements
include the complete process of estimating a homo-
graphy, i.e. staring from point correspondences, the
construction of the DLT system, extracting the null
space through SVD, and—except for the 4-point
solver—the parameter estimation for the basis ele-
ments of the null space, and construction of putative
homographies.
In Table 1 the timing comparison is shown, and
the speed-up between the minimal 2.5-point solver
and 3pt(4+4) solver is clear, however, in terms of
speed the traditional 4-point solver is faster. In a
complete RANSAC framework, however, the 3-point
solver and the 4-point solver is closer in terms of
speed, due to the 4-point solver requiring more iter-
ations to achieve the same probability of selecting a
subset containing only inliers.
Table 1: Mean execution time for 10,000 randomly gener-
ated problems.
Solver Exec. time (ms)
2.5pt 0.7960
3pt(4+4) 0.1334
3pt(4+6) 1.6161
3.5pt(4) 0.0344
3.5pt(6) 0.2919
4pt 0.0334
When enforcing the sixth degree polynomial in
the 3-point solver the number of solutions increase,
hence the corresponding elimination template. Fur-
thermore, the complexity of the coefficients increase,
and this holds true in the case of the 3.5-point solvers
as well, which is why the execution time is faster
without the sextic constraint.
7.3 Synthetic Image Evaluation
A sequence of synthetic images were generated, com-
patible with the general planar motion model, by
cropping out images from a high-resolution image. In
order to simulate the overhead tilt the original image
was transformed prior to cropping it. An elliptic path
containing 49 images were generated, as well as the
corresponding ground truth.
The homographies were computed by extracting
and matching SURF features. In order to estimate the
trajectory, the homographies were decomposed us-
ing the method described in Section 3.2. The point
correspondences were normalized prior to estimat-
ing the homographies to increase numerical stability.
The extracted motion parameters were compared to
the ground truth. Due to the random nature of the
RANSAC, the recovered parameters were averaged
over 100 iterations. The results are shown in Table 2.
Table 2: Mean estimation error for the motion parameters
for the synthetic image test averaged over 100 iterations.
Angles are measured in degrees, and translation in pixels.
The best performance is in bold.
2.5pt 3pt(4+4) 3pt(4+6) 3.5pt(4) 3.5pt(6) 4pt
ψ 0.0035 0.0005 0.0029 0.0004 0.0006 0.0007
θ 0.0019 0.0006 0.0013 0.0005 0.0006 0.0007
φ 1.08 0.68 0.77 0.76 0.73 0.86
t
t
t 20.36 6.85 10.49 6.99 7.65 11.29
We observe that the minimal solver is no longer
producing the best results, and one may note the ad-
Fast Non-minimal Solvers for Planar Motion Compatible Homographies
45
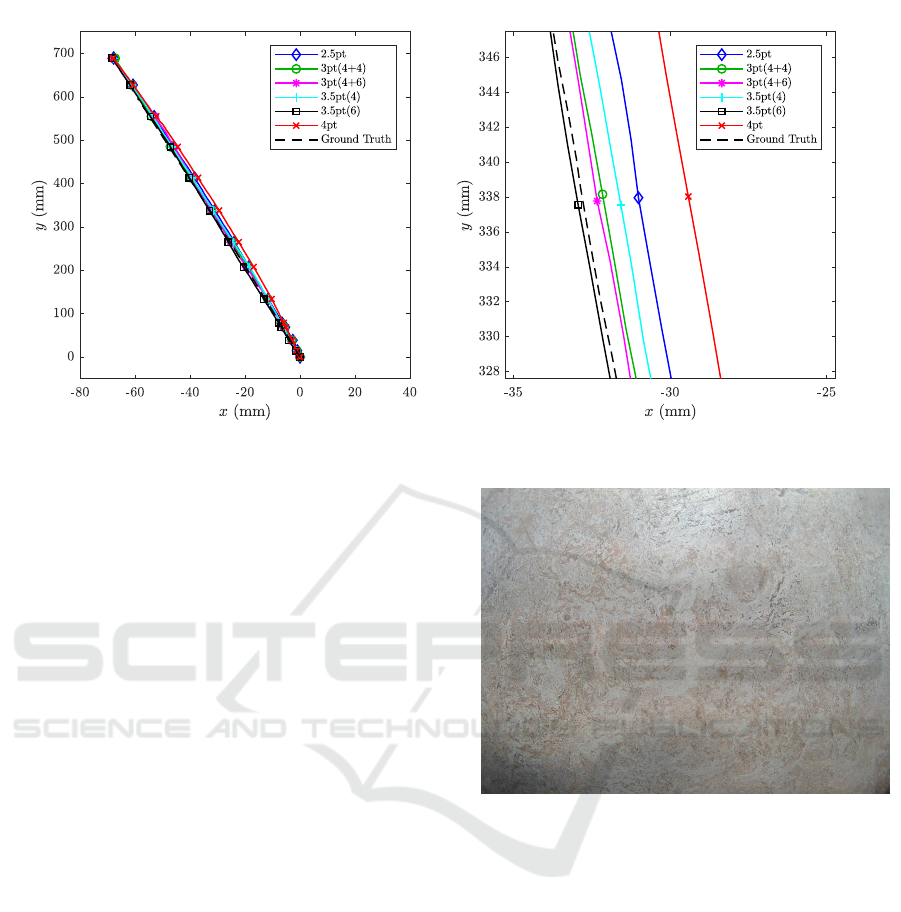
Figure 5: The sequence of the planar motion test set. The entire trajectory is shown to the left, and to the right a zoomed in
version showing the difference in estimates by using different solvers. The total sequence contains 320 images.
vantage of using non-minimal solvers. The exact rea-
son why this phenomenon arises when considering
synthetically generated sequences of images and not
synthetically generated sequences of homographies is
hard to pinpoint; however, we note the following dif-
ferences: (a) the matched points, which are the in-
put to the solvers do not follow a Gaussian distribu-
tion, and (b) when analyzing the numerical rank of the
elimination template it often has less than full rank,
which is not the case for the Gaussian distributed
noise. This holds true regardless of whether one nor-
malizes the image points or not. (c) the numerical
rank of the other elimination templates do not change
when going from synthetic homographies to synthetic
images.
7.4 Planar Motion Evaluation
The following experiments were conducted using a
mobile robot with omnidirectional wheels, of model
Fraunhofer IPA rob@work. A camera was mounted,
directed towards the floor, and the ground truth was
measured using a Nikon Metrology K600 optical
tracking system. The system has an absolute accuracy
of 100 µm. In Figure 6 example images from one of
the sequences are shown. In the first test sequences
the robot travels along a straight line, while keeping
the orientation constant.
The same approach for computing the homogra-
phies in Section 7.3, after first compensating for geo-
metric distortion. The results are shown in Figure 5,
and more test results are shown in the Appendix.
Note, that the minimal solver and the 4-point solver
are the ones to deviate the most from the ground truth
trajectory.
Figure 6: Example image from the planar motion sequence.
7.5 Evaluation on the KITTI Dataset
The KITTI Visual Odometry / SLAM bench-
mark (Geiger et al., 2012) is a well-known evalua-
tion dataset for SLAM frameworks, and contains sev-
eral sequences with planar or near planar motion. A
large portion of the images depict the roads, on which
the car travels, however, one must note that this is
only a coarse approximation to the general planar mo-
tion model, as all sequences contain non-planar struc-
tures to some extent, e.g. passing vehicles, pedestri-
ans, traffic barriers and road signs. This, however, is
a good way of testing the robustness of the proposed
solvers, as future applications may not entirely ful-
fill the general planar motion model. Furthermore, in
order to be able to consider the input images as de-
picting a (near) planar scene, a subset of the image is
cropped out before estimating the homographies, as is
illustrated in Figure 8.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
46

00 01 02 03 04 05 06 07 08 09 10
10
−2
10
−1
10
0
Sequence no.
Translation error (m)
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
Figure 7: Mean translation error for the first ten images of the first camera of Sequence 00–10 of the KITTI dataset. These
are all image sequences containing ground truth. At least on of the proposed solvers have the lowest mean translation error in
all but one of the eleven cases. The mean translation error is computed over 500 iterations.
Figure 8: Image from the KITTI Visual Odometry / SLAM
benchmark, Sequence 03. The cropped area (contained
within the thick border) depict the image used to compute
the homographies. Image credit: KITTI dataset (Geiger
et al., 2012).
From the cropped images of the first eleven se-
quences of the KITTI dataset, for which ground truth
data is available, the homographies were computed
using SURF features, as in the previous experiments.
The performance of the solvers was measured as the
mean error of the Euclidean distance between the
ground truth positions and estimated positions. The
results are averaged over 500 tests, and include the
first ten images of each sequence. This number was
chosen to reduce the impact of error propagation,
while still having a noticeable effect of imposing the
general planar motion model. The differences of the
estimation is due to the matching algorithm as well as
the RANSAC framework for estimating the homogra-
phies. No non-linear refinement of the homographies
were used. The results are shown in Figure 7.
The proposed solvers are robust, and produce a
good initial estimate for the trajectory, and at least one
of the proposed solvers has the lowest median trans-
lation error in all sequences, except Sequence 01.
This result may, to some extent, be unanticipated,
however, one must not forget that the conditions for
the general planar motion model is not fulfilled in the
KITTI dataset. The disadvantage of using the min-
imal 2.5-point solver, it seems, is that the model is
imposed exactly, whereas for the 4-point DLT solver,
the model is completely disregarded, and instead are
determined solely by the data. One possible an-
swer to the results we observe on the KITTI dataset,
which favours the proposed solvers, is that it enforces
a weaker form of the general planar motion model
(since only one or two of the defining equations are
considered) and tunes to the data in cases where the
model assumptions are invalid.
8 CONCLUSIONS
In this paper a novel non-minimal polynomial con-
straint for homographies compatible with the general
planar motion model has been derived. A series of
non-minimal solvers have been proposed, which en-
forces one or two of the defining constraints. They
have been demonstrated on synthetic and real data
to perform well, and two of them are reported to be
faster than the minimal solver.
In cases where the general planar motion model is
a coarse approximation of the actual scene it is likely
that the proposed solvers are more robust, compared
to both the minimal solver and the 4-point solver.
Hence, it has been demonstrated that pre-maturely en-
forcing the planar motion model, without incorporat-
ing the fixed overhead tilt constraint, does not neces-
sarily yield a better end result.
By incorporating the proposed solver in a com-
plete SLAM system, it is likely that the total execution
time will decrease due to a lower number of iterations
needed by non-linear refinement of poses and scene
points in a bundle adjustment framework.
ACKNOWLEDGMENTS
The author gratefully acknowledges M
˚
arten
Wadenb
¨
ack and Martin Karlsson for providing
the data for the planar motion compatible sequences.
Fast Non-minimal Solvers for Planar Motion Compatible Homographies
47

This work has been funded by the Swedish Research
Council through grant no. 2015-05639 ‘Visual
SLAM based on Planar Homographies’.
REFERENCES
Chen, T. and Liu, Y.-H. (2006). A robust approach for struc-
ture from planar motion by stereo image sequences.
Machine Vision and Applications (MVA), 17(3):197–
209.
Cox, D. A., Little, J., and O’Shea, D. (2005). Using Al-
gebraic Geometry. Graduate Texts in Mathematics.
Springer New York.
Fischler, M. and Bolles, R. (1981). Random sample consen-
sus: A paradigm for model fitting with applications to
image analysis and automated cartography. Commu-
nications of the ACM, 24(6):381–395.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? The KITTI vision bench-
mark suite. Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 3354–3361.
Grayson, D. R. and Stillman, M. E. (2018). Macaulay2 –
a software system for research in algebraic geometry.
Available at http://www.math.uiuc.edu/Macaulay2/.
Hajjdiab, H. and Lagani
`
ere, R. (2004). Vision-based multi-
robot simultaneous localization and mapping. In
Canadian Conference on Computer and Robot Vision
(CRV), pages 155–162, London, ON, Canada.
Hartley, R. I. and Zisserman, A. (2004). Multiple View Ge-
ometry in Computer Vision. Cambridge University
Press, Cambridge, England, UK, second edition.
Kukelova, Z., Bujnak, M., and Pajdla, T. (2008). Automatic
generator of minimal problem solvers. European Con-
ference on Computer Vision (ECCV), pages 302–315.
Larsson, V. and
˚
Astr
¨
om, K. (2016). Uncovering symme-
tries in polynomial systems. European Conference on
Computer Vision (ECCV), pages 252–267.
Larsson, V.,
˚
Astr
¨
om, K., and Oskarsson, M. (2017a). Ef-
ficient solvers for minimal problems by syzygy-based
reduction. Computer Vision and Pattern Recognition
(CVPR), pages 2383–2392.
Larsson, V.,
˚
Astr
¨
om, K., and Oskarsson, M. (2017b). Poly-
nomial solvers for saturated ideals. International
Conference on Computer Vision (ICCV), pages 2307–
2316.
Larsson, V., Kukelova, Z., and Zheng, Y. (2018a). Camera
pose estimation with unknown principal point. Com-
puter Vision and Pattern Recognition (CVPR), pages
2984–2992.
Larsson, V., Oskarsson, M.,
˚
Astr
¨
om, K., Wallis, A.,
Kukelova, Z., and Pajdla, T. (2018b). Beyond gr
¨
obner
bases: Basis selection for minimal solvers. Computer
Vision and Pattern Recognition (CVPR), pages 3945–
3954.
Liang, B. and Pears, N. (2002). Visual navigation using
planar homographies. In International Conference
on Robotics and Automation (ICRA), pages 205–210,
Washington, DC, USA.
M
¨
oller, H. M. and Stetter, H. J. (1995). Multivariate poly-
nomial equations with multiple zeros solved by matrix
eigenproblems. Numerische Mathematik, 70(3):311–
329.
Ort
´
ın, D. and Montiel, J. M. M. (2001). Indoor robot motion
based on monocular images. Robotica, 19(3):331–
342.
Torr, P. H. S., Zisserman, A., and Maybank, S. J. (1998).
Robust detection of degenerate configurations while
estimating the fundamental matrix. Computer Vision
and Image Understanding, 71(3):312 – 333.
Trefethen, L. and Bau, D. (1997). Numerical Linear Alge-
bra. SIAM.
Triggs, B. (1991). Camera pose and calibration from 4 or
5 known 3d point. International Conference on Com-
puter Vision (ICCV), pages 278–284.
Ventura, J., Arth, C., Reitmayr, G., and Schmalstie, D.
(2014). A minimal solution to the generalized pose-
and-scale problem. Computer Vision and Pattern
Recognition (CVPR), pages 422–429.
Wadenb
¨
ack, M. and Heyden, A. (2013). Planar motion and
hand-eye calibration using inter-image homographies
from a planar scene. International Conference on
Computer Vision Theory and Applications (VISAPP),
pages 164–168.
Wadenb
¨
ack, M. and Heyden, A. (2014). Ego-motion recov-
ery and robust tilt estimation for planar motion using
several homographies. International Conference on
Computer Vision Theory and Applications (VISAPP),
pages 635–639.
Wadenb
¨
ack, M.,
˚
Astr
¨
om, K., and Heyden, A. (2016). Re-
covering planar motion from homographies obtained
using a 2.5-point solver for a polynomial system. In-
ternational Conference on Image Processing (ICIP),
pages 2966–2970.
Zheng, Y., Kuang, Y., Sugimoto, S.,
˚
Astr
¨
om, K., and Oku-
tomi, M. (2013). Revisiting the pnp problem: A fast,
general and optimal solution. International Confer-
ence on Computer Vision (ICCV), pages 2344–2351.
Zienkiewicz, J. and Davison, A. J. (2015). Extrinsics auto-
calibration for dense planar visual odometry. Journal
of Field Robotics (JFR), 32(5):803–825.
APPENDIX
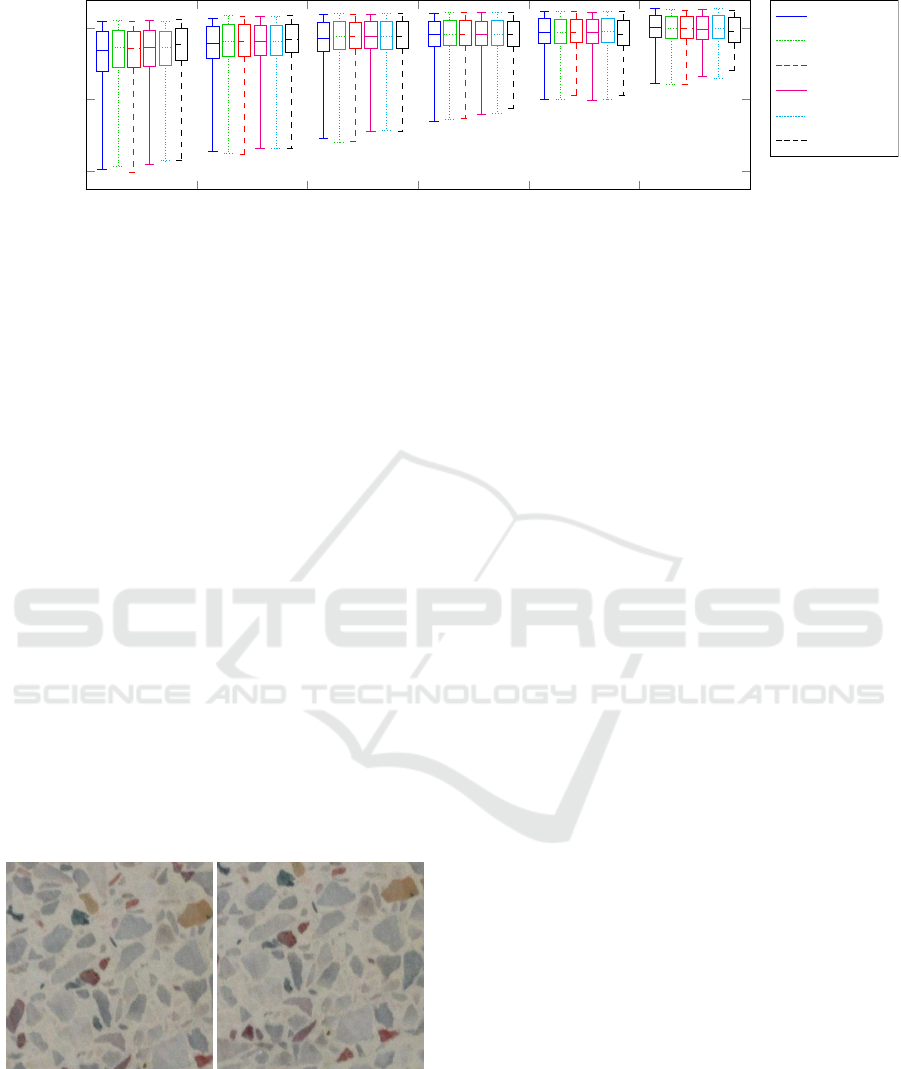
Synthetic Experiments
Re-projection Error
In (Wadenb
¨
ack et al., 2016) the re-projection error for
the point correspondences not used in order to obtain
the estimated homographies were analysed, and we
reproduce it here together with the proposed solvers.
As seen in Figure 9, the trend is similar to what was
observed in the previous case (cf. Frobenius norm es-
timate, Figure 3) namely, the median re-projection er-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
48
10
−3
10
−2.5
10
−2
10
−1.5
10
−1
10
−0.5
10
−3
10
−1
10
1
σ
N
Re-projection Error
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
Figure 9: Mean re-projection error for different noise levels σ
N
. Similar to Figure 3 the median value for the proposed solvers
is between the corresponding values for the 2.5-point solver and DLT; however, for higher noise levels, we note an advantage
for the non-minimal solvers and DLT compared to the minimal 2.5-point solver.
rors for the non-minimal solvers are between the cor-
responding values of the minimal 2.5-point solver and
the 4-point solver (DLT) for all noise levels. Note,
however, that for large noise levels, the 2.5-point
solver does not perform as well as the non-minimal
solvers or the traditional 4-point solver.
Motion Parameters
Additional plots for the second synthetic experiment,
regarding the estimation of the motion parameters, is
shown in Figure 11. The mean errors are for noise
level σ
N
= 10
−2
. In Figure 12 the same parameters,
but for σ
N
= 10
−1
are shown.
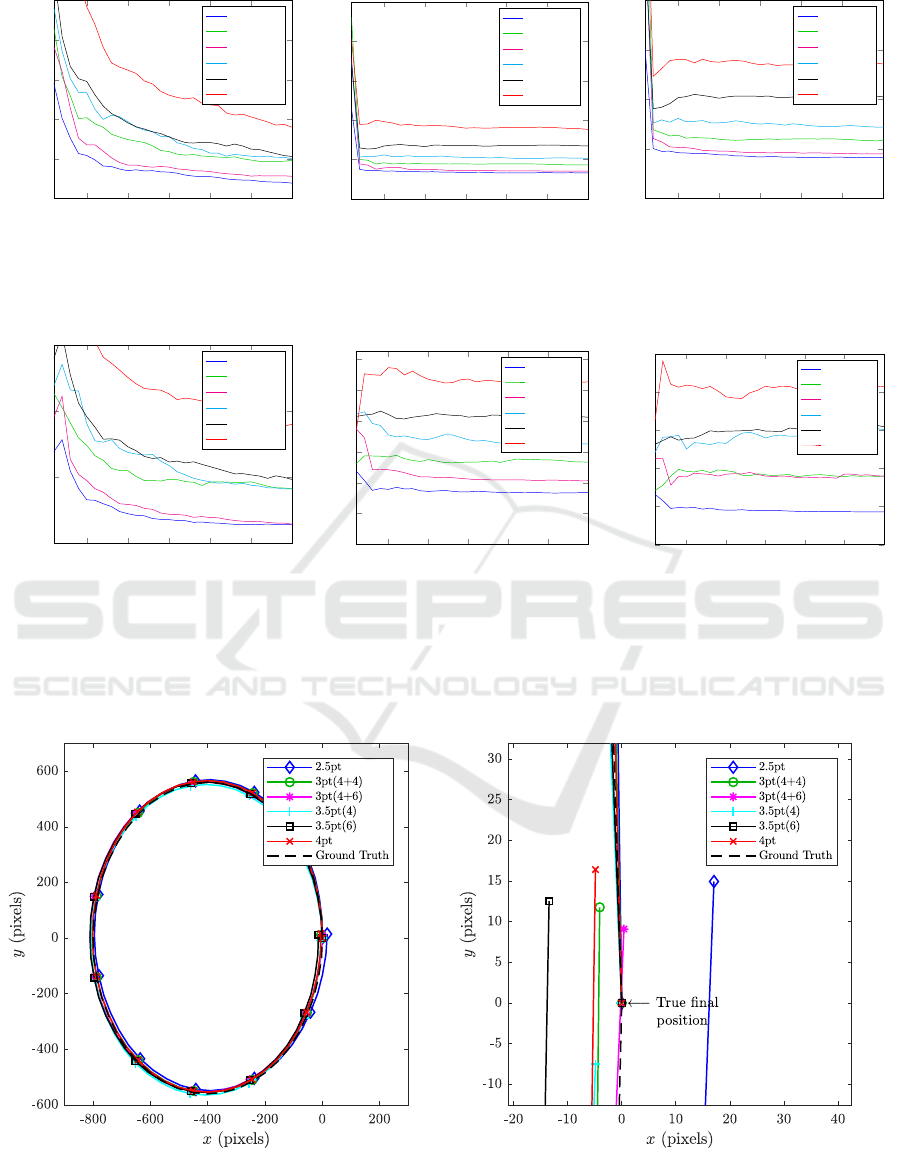
Synthetic Images
Example images that were used in the synthetic image
experiment is shown in Figure 10, and example output
for the reconstructed path is shown in Figure 13 for all
solvers. Neither the 4pt solver, nor the minimal solver
performs best in this case.
Figure 10: Two consecutive images from the synthetic
dataset.
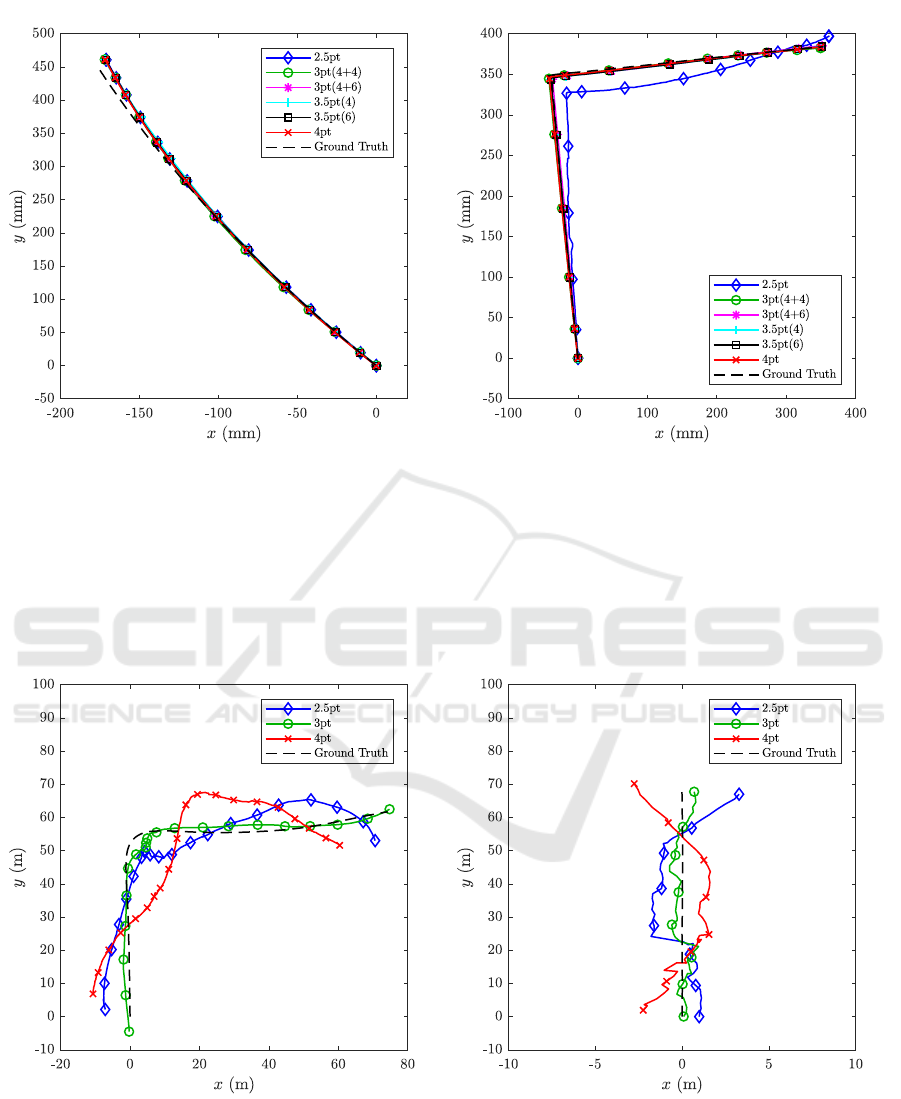
Experiments on Real Data
Planar Motion
We here show two more test cases conducted with the
omnidirectional robot rob@work, from Section 7.4.
In the first test case the robot moves forward (in re-
lation to its own frame), while rotating, thus creating
a light turn. The sequence contains 344 images. In
the second test case the robot simulates a sequences
of parallel parking, by first driving straight and then
making a sharp turn, while keeping the orientation
constant. This sequence contains 325 images. The
estimated paths are shown in Figure 14.
KITTI Dataset
To demonstrate some qualitative usage of the pro-
posed solvers, four longer subsequences of the KITTI
dataset were evaluated, see Figure 15. Only the
3pt(4 + 4) solver is shown in order to make the plots
legible. For sequences of this length it is customary
to use bundle adjustment, or some other non-linear
refinement that minimize a physically meaningful er-
ror such as the geometric re-projection error or photo-
metric error. In order for such optimization schemes
to converge in a reasonable amount of time it is often
necessary to supply a good initial guess of the tra-
jectory. Due to the reduced computational complex-
ity, comparable to using the 4-point DLT solver, when
considered in a RANSAC framework, and the quali-
tative performance on the KITTI dataset, we find the
proposed 3-point solver to be a suitable alternative to
be incorporated in a SLAM system.
Fast Non-minimal Solvers for Planar Motion Compatible Homographies
49
5 10 15 20 25 30
0.00
0.05
0.10
0.15
0.20
0.25
Number of homographies
Mean error θ
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
5 10 15 20 25 30
0.00
0.50
1.00
1.50
2.00
2.50
Number of homographies
Mean error φ
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
5 10 15 20 25 30
0.00
2.00
4.00
6.00
8.00
Number of homographies
Mean error t
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
Figure 11: Mean error for θ, φ (in degrees) and t
t
t for 100 iterations with σ
N
= 10
−2
.
5 10 15 20 25 30
0.00
1.00
2.00
3.00
Number of homographies
Mean error θ
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
5 10 15 20 25 30
0.00
2.00
4.00
6.00
8.00
10.00
12.00
Number of homographies
Mean error φ
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
5 10 15 20 25 30
0.00
20.00
40.00
60.00
80.00
100.00
Number of homographies
Mean error t
2.5pt
3pt(4+4)
3pt(4+6)
3.5pt(4)
3.5pt(6)
4pt
Figure 12: Mean error for θ, φ (in degrees) and t
t
t for 100 iterations with σ
N
= 10
−1
.
Figure 13: Example of reconstructed path for the synthetic image sequence for all solvers, and zoomed in at the final position
(right image).
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
50
(a) . (b) .
Figure 14: Estimated trajectories of the mobile robot used in the planar motion experiments for the “turn” experiment (left)
and the “parallel parking” experiment.
(a) Sequence 03 (200 images). (b) Sequence 04 (50 images).
Figure 15: Estimated trajectories of subsequences of Sequence 03 and 04 of the KITTI dataset. Procrustes analysis has been
carried out to align the estimated trajectories with the ground truth. Note that the aspect ratio differs between sequences, in
order to clearly visualize the differences between the estimated trajectories. No non-linear refinement has been carried out in
any of the test cases. The 3-point solver used is the 3pt(4+4) solver.
Fast Non-minimal Solvers for Planar Motion Compatible Homographies
51
