
Distributed Range-based Localization for Swarm Robot Systems using
Sensor-fusion Technique
Daisuke Inoue, Daisuke Murai, Yasuhiro Ikuta and Hiroaki Yoshida
Toyota Central R&D Labs., Inc., Nagakute, Aichi, Japan
Keywords:
Network Localization, Swarm Robotics, Sensor Fusion.
Abstract:
Herein, we present a localization method for swarm robot systems that relies solely on measured distances
from surrounding robots. Using the sensor fusion technique, an exteroceptive estimation method based on
the measured distance is dynamically coupled with a simple proprioceptive estimation that uses a robot’s
own dynamical properties. Our method strictly preserves the locality of algorithm. The results of numerical
simulations for several scenarios show that our proposed method is more accurate that conventional methods.
1 INTRODUCTION
Swarm robot systems consist of large numbers of sim-
ple physical robots that cooperate with each other in
order to perform complicated tasks as a group (Barca
and Sekercioglu, 2013; Brambilla et al., 2013; Sahin,
2004). Recently, because such systems have attracted
significant amounts of attention due to positive fea-
tures such as their flexible adaptability to various en-
vironments and robustness against failure (Tan, 2015;
Cao et al., 1997), there has been a concurrent increase
in the proposed task execution control techniques re-
quired for such robot systems (Cheah et al., 2009;
Xie and Wang, 2007; Spears et al., 2004; Castillo
et al., 2012). In most of those control methods, each
robot is presumed to be capable of ascertaining its
own position (Wang and Guo, 2008; Bandyopadhyay
et al., 2017; Rubenstein and Shen, 2009) by means
of GPS data or via image recognition using cam-
eras installed overhead or the like. However, GPS
is limited in terms of resolution and indoor use util-
ity (Kourogi et al., 2006), and image recognition in-
volves problems in that the amount of communication
data increases along with the number of robots (Luo
et al., 2014). Therefore, in order to maximize the util-
ity of swarm robot systems, it is necessary for each
robot to be capable of estimating its own position
autonomously and locally without relying on exter-
nal systems, such as information exchanges between
swarm robots.
When discussing the behaviors of swarm robot
systems, the abilities and functions of each robot must
be fixed. It should also be possible to exchange
various elements of information such as relative an-
gles, relative distances, or both (i.e., relative posi-
tions) among the robots. Of these, the use of rela-
tive distance is the most feasible because it can be
easily transmitted and received simply by installing
a single proximity sensor using infrared rays or ultra-
sonic waves on each robot body (Blais, 2004). In fact,
inexpensive robots equipped only with actuators and
a range sensor have already been developed (Ruben-
stein et al., 2012). For this reason, this study focuses
on the problem of self-position estimation from the
premise that each robot can only measure its distance
from other swarm robots. This type of problem is
called range-based localization.
Range-based localization has attracted attention in
tandem with the rapid growth of interest in swarm
robot systems and different methods have been pro-
posed to achieve it (Biswas et al., 2006; Shang et al.,
2004; Dil et al., 2006; Zhou et al., 2015; Shang and
Ruml, 2004). In (Eren et al., 2004), the geometric
conditions that a robot needs to satisfy in order to
estimate its position from distance information were
given and a position estimation method that worked
by minimizing the evaluation function of the differ-
ence between observed and estimated positions was
proposed. However, the author of (Moore et al., 2004)
pointed out that the technique in (Eren et al., 2004) is
vulnerable to observed distance noise and proposed
a more robust method in which robots first estimate
their positions in a cluster of robots close to each
other, and then perform coordinate transformations
between clusters. We note here that in many meth-
ods, including (Eren et al., 2004; Moore et al., 2004),
Inoue, D., Murai, D., Ikuta, Y. and Yoshida, H.
Distributed Range-based Localization for Swarm Robot Systems using Sensor-fusion Technique.
DOI: 10.5220/0007258800130022
In Proceedings of the 8th International Conference on Sensor Networks (SENSORNETS 2019), pages 13-22
ISBN: 978-989-758-355-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
13

it is assumed that there is a so-called anchor node
that collects and calculates information of the sur-
rounding robots and then retransmits the calculated
result to the surrounding devices. This means that
as the number of robots increases, robot node com-
putational costs and memory capacity requirements
also increase, which results in communication route
congestion. To overcome this problem, in (Calafiore
et al., 2010), a distributed method via which a robot
could update its own estimated position simply by
communicating with the robots closest to it was pro-
posed. This method enables scalable estimations to
be performed independently of the number of robots.
In the present study, we propose a method of
range-based localization in which each robot uses in-
formation obtained both from its own dynamical char-
acteristics and relative distance measurements. More
specifically, we aim to improve the self-position es-
timation method proposed in (Calafiore et al., 2010)
by combining it with an estimation method based on
dynamical characteristics.
Accuracy improvements using multiple informa-
tion types has been well studied in the field of sen-
sor fusion. For example, several methods combining
information from GPS and overhead cameras (Choi
et al., 2011; Deming, 2005; La and Sheng, 2013; Mao
et al., 2007), or applying feedback terms based on
relative distance to estimations using odometry (Mar-
tinelli et al., 2005), have been proposed. However,
in either case, the communication and calculation
costs increase as more robots are added, and scala-
bility is sacrificed. In contrast, in our method, the lo-
cality of the algorithm is inherited from the method
in (Calafiore et al., 2010) and the estimated value is
based on the dynamical model. We begin by com-
bining the two estimated values by regarding both es-
timation methods as dynamical characteristics, and
then determine the values of weights coefficients in
a way that minimizes error variances. Next, after
problem formulation, we detail the algorithm proce-
dure. We also show numerical results to confirm the
improvements of our proposed method over conven-
tional methods.
2 PROBLEM FORMULATION
In this section, we set up a problem for formulat-
ing the range-based localization. We begin by con-
sidering N mobile robots located on two-dimensional
(2D) space. Each robot has a unique ID from 1 to
N, and the set of these IDs is expressed as N =
{1, 2, . . . , N}. Let the states of the robot i ∈ N at
time k ∈ N be s
i
(k) := [x
i
(k) y
i
(k) θ
i
(k)]
T
. Here,
p
i
(k) := [x
i
(k) y
i
(k)]
T
∈ R
2
represents a point in 2D,
and θ
i
(k) ∈ (−π, π] represents an angle.
The purpose of this study is to provide an algo-
rithm for each robot i to use when producing a self-
position estimation ˆs
i
(k) = [ ˆx
i
(k) ˆy
i
(k)
ˆ
θ
i
(k)]
T
, which
should be as close as possible to its true position s
i
(k).
To accomplish this, we make the following assump-
tion, which is the premise of localization.
(i) The dynamics of each robot is described by the
following two-wheel vehicle model:
x
i
(k + 1) = x
i
(k) + εv
i
(k) cos(θ
i
(k)),
y
i
(k + 1) = y
i
(k) + εv
i
(k) sin(θ
i
(k)),
θ
i
(k + 1) = θ
i
(k) + εω
i
(k),
(1)
where ε ∈ R
+
(:= {r; r ∈ R, r > 0}) is a param-
eter corresponding to the sampling period, while
v
i
(k) ∈ R and ω
i
(k) ∈ R represent the translation
and rotation speed of the robot, respectively.
Equation (1) represents a model in which each
robot moves in 2D space according to the input
of the translation and rotation speed. Defining
input u
i
(k) ∈ R
2
as u
i
(k) := [v
i
(k) ω
i
(k)]
T
, and
g : R
3
× R
2
→ R
3
as
g(x, y) :=
x
1
+ εy
1
cos(x
3
)
x
2
+ εy
1
cos(x
3
)
x
3
+ εy
2
, (2)
Eq. (1) can be written as:
s
i
(k + 1) = g(s
i
(k), u
i
(k)). (3)
(ii) Since none of the robots are equipped with GPS
sensors or wheel encoders, they are incapable of
directly obtaining their true states s
i
(k). Hence,
it is impossible for any robot to calculate the in-
put u
i
(k) using state s
i
(k) (i.e., state feedback).
(iii) Each robot communicates with a neighboring
robot. Let us define the adjacency set N
i
(k), i.e.,
the set of number of robots j that can communi-
cate with robot i at time k, as:
N
i
(k) = { j ∈ N | kp
i
(k) − p
j
(k)k < D} (4)
where D ∈ R
+
represents the communicable
distance of the robot, and k · k represents Eu-
clidean norm: for any p ∈ R
2
,
kpk :=
p
p
T
p. (5)
Robot i can receive the following two pieces of
information from robot j ∈ N
i
(k):
(a) d
i j
(k) = kp
i
(k) − p
j
(k)k: Euclidean distance
of robots i and j,
(b) ˆp
j
(k): Estimated position of robot j.
SENSORNETS 2019 - 8th International Conference on Sensor Networks
14

(iv) In (Eren et al., 2004), the geometric conditions
that need to be satisfied in order to uniquely
determine a position using distance information
are shown. In that method, a network only has a
unique localization if and only if its underlying
graph is generically globally rigid. We assume
that this condition is satisfied at an arbitrary time
k ∈ N.
3 LOCALIZATION ALGORITHM
3.1 Proprioceptive Estimation
First, we will describe a localization method based on
the dynamical characteristics of each robot shown in
Eq. (1). Let ˜s
i
(k) = [ ˜x
i
(k) ˜y
i
(k)
˜
θ
i
(k)]
T
be the esti-
mated value of the state of robot i at time k and u
i
(k)
be the input, and let these be known. Then, the value
of the state at the next time ˜s
i
(k + 1) is estimated by
using Eq. (1) as follows:
˜s
i
(k + 1) = g( ˜s
i
(k), u
i
(k)).
(6)
Hereafter, the method based on Eq. (6) is called
the proprioceptive method. Unlike the exteroceptive
method detailed in the next section, since the infor-
mation necessary for the estimation is closed in each
robot, estimation accuracy does not depend on com-
munication quality with the neighboring robots. An-
other advantage is that it allows the robot to estimate
the angle, as well as its position. However, since
Eq. (6) excludes a feedback term for the observed in-
formation, errors accumulate over time and the devi-
ation from the true value eventually becomes large.
3.2 Exteroceptive Estimation based on
the Distributed Gradient Method
Here, we present a localization method based on com-
munication with neighboring robots. Suppose that
each robot i receives an observed distance value from
neighboring robot d
i j
and an estimated position of
neighboring robot ˆp
j
. First, we define an evaluation
function f : R
2N
→ R that shows the consistency of
the estimated position with respect to the observed
distance:
f ( ˆp(k)) =
∑
i∈N
∑
j∈N
i
(k ˆp
i
(k) − ˆp
j
(k)k − d
i j
(k))
2
, (7)
ˆp(k) := [ ˆp
1
(k)
T
ˆp
2
(k)
T
··· ˆp
N
(k)
T
]
T
. (8)
The localization is then formulated as an optimization
problem that minimizes the function f :
minimize f ( ˆp(k)). (9)
One of the most common methods for solv-
ing the optimization problem above is the gradient
method (Eren et al., 2004). This method first esti-
mates an appropriate initial position and updates the
estimated position via:
ˆp(k + 1) = ˆp(k) − α(k)∇ f ( ˆp(k)), (10)
where α(k) ∈ R
+
is the design parameter called a step
length. As α(k) becomes larger, the convergence of
the ˆp(k) becomes faster. However, if the value of α(k)
is too large, then ˆp(k) diverges. As a condition for
the convergence of ˆp(k), what is called a Walfe con-
dition is known. When α(k) satisfies this condition,
Eq. (10) converges to the local optimal solution (No-
cedal, 2006).
In Eq. (10), the gradient ∇ f depends on the esti-
mated position of all robots ˆp(k), but it consists of the
sum of the pair terms of the estimated positions that
are located in the neighborhood. Using this property,
we can decompose it and rewrite Eq. (10) for each
robot i as follows:
ˆp
i
(k + 1) = ˆp
i
(k) − α
i
(k)∇
i
f
i
( ˆp(k)), (11)
where we defined f
i
as
f
i
( ˆp(k)) =
∑
j∈N
i
(k ˆp
i
(k) − ˆp
j
(k)k − d
i j
(k))
2
, (12)
and ∇
i
f denotes the i-th 1×2 block in the gradient ∇ f
in Eq. (10). We generalized the step length as α
i
(k).
By applying Eq. (11), each robot independently
updates its estimated position with a calculation of the
local evaluation function f
i
. This method type is often
called a distributed gradient method (Calafiore et al.,
2010). In this study, it is adopted as the exteroceptive
method. In order to satisfy the Walfe condition, the
author of (Calafiore et al., 2010) proposed a method
of sequentially updating the weights α
i
(k) so that the
robots could communicate. For simplicity, however,
we assume that weight α
i
(k) is invariant over time,
and set α as the common weight for all robots.
Since the exteroceptive method uses distances be-
tween robots, the estimation performance degrades if
the distance measurement is not accurate. In addi-
tion, since only the robot position is estimated with
this method, it is not possible to estimate the state in-
cluding the angle of the robot. To overcome these
challenges, we propose a position estimation method
that works by fusing both the proprioceptive and exte-
roceptive methods, as will be detailed in the following
section.
3.3 Proposed Estimation Method
In the previous subsections, we have shown the state
estimation algorithms using proprioceptive and exte-
roceptive information. The drawback of the former
Distributed Range-based Localization for Swarm Robot Systems using Sensor-fusion Technique
15

is in that it is weak against modeling errors and input
noises, while the latter is vulnerable to distance mea-
surement errors. We will now propose a new method
that improves performance by obtaining the weighted
sum from the error variances of the two estimated val-
ues.
First, we will describe error variance minimiza-
tion. Suppose that a variable z is estimated by two dif-
ferent methods as ˜z, ˆz and that the errors of the meth-
ods are defined as
˜
δ = z − ˜z,
ˆ
δ = z − ˆz. Then, assuming
that the variance of
˜
δ and
ˆ
δ is calculated as
˜
V ,
ˆ
V , the
weighted sum of ˜z and ˆz,
¯z = ˜z + (
˜
V
−1
+
ˆ
V
−1
)
−1
ˆ
V
−1
(ˆz − ˜z), (13)
is known to minimize the error variance of estimated
value (Gustafsson, 2010). In the following subsec-
tion, we evaluate the error variance of position esti-
mated using both the proprioceptive and exterocep-
tive methods and then combine the estimation values
using the Eq. (13).
3.3.1 Error Variance of Proprioceptive Method
First, we derive an approximate expression for esti-
mating the error distribution of the states in the propri-
oceptive method. The input command value for robot
i at time k is denoted as u
0
i
(k), and the input actually
applied is denoted as u
i
(k). We then write the input
error as δ
u
i
(k) := u
i
(k) − u
0
i
(k). Additionally, we de-
note the true and estimated value of the state of robot
i as s
i
(k) and ˜s
i
(k) respectively, and the estimation er-
ror as δ
s
i
(k) := s
i
(k) − ˜s
i
(k).
Then, the state at time k + 1 is represented as
s
i
(k + 1) = g(s
i
(k), u
i
(k))
= g( ˜s
i
(k) + δ
s
i
(k), u
0
i
(k) + δ
u
i
(k)).
(14)
By linearizing the right-hand side of Eq. (14), we ob-
tain
s
i
(k + 1) ≈ g( ˜s
i
(k), u
0
i
(k)) + J
s
i
(k)
δ
s
i
(k) + J
u
i
(k)
δ
u
i
(k),
(15)
where we have defined
J
s
i
(k)
:=
1 0 −ε sin(
˜
θ(k))v
0
i
(k)
0 1 ε cos(
˜
θ(k))v
0
i
(k)
0 0 1
, (16)
J
u
i
(k)
:=
ε cos(
˜
θ(k)) 0
ε sin(
˜
θ(k)) 0
0 ε
. (17)
Therefore, the estimation error δ
s
i
(k + 1) caused by
Eq. (6) is written as the following expression:
δ
s
i
(k + 1) := s
i
(k + 1) − ˜s
i
(k + 1)
= s
i
(k + 1) − g( ˜s
i
(k), u
0
i
(k))
≈ J
s
i
(k)
δ
s
i
(k) + J
u
i
(k)
δ
u
i
(k).
(18)
We then assume the following in order to obtain an
approximate representation of the error variance using
the above equation: (i) Estimated error of state δ
s
i
(k)
is a random variable, and its distribution is a Gaussian
distribution with an average of 0 and a variance of
˜
V
s
i
(k). (ii) Similarly, let δ
u
i
(k) be a random variable
that follows the Gaussian distribution N(0,V
u
i
) at all
times k. (iii) δ
s
i
(k) and δ
u
i
(k) are independent.
Then, if we know
˜
V
s
i
(0) and V
u
i
for all i ∈ N , the
error variance of state at time k + 1 is approximated
using information at time k as
˜
V
s
i
(k + 1) = J
s
i
(k)
˜
V
s
i
(k)J
T
s
i
(k)
+ J
u
i
(k)
V
u
i
J
T
u
i
(k)
. (19)
3.3.2 Error Variance of Exteroceptive Method
Next, we derive the error variance of state in the ex-
teroceptive method. Let d
i j
(k) be the true distance
between robots i and j at time k, let d
0
i j
(k) be the
observed distance, and define the error as δ
d
i j
(k) :=
d
i j
(k) − d
0
i j
(k). We further assume that the true and
estimated position of robot i is p
i
(k) and ˆp
i
(k) respec-
tively, and the estimation error is δ
p
i
(k) := p
i
(k) −
ˆp
i
(k).
In Eq. (11), if d
i j
(k) is correctly observed, the es-
timated value ˆp
i
(k) is expected to converge to the true
value p
i
(k) as k → ∞. In addition, if ˆp
i
(k) = p
i
(k)
holds, in the next iteration in Eq. (11), ˆp
i
(k + 1) =
p
i
(k + 1) is expected to hold as well. However, this is
not the case if d
i j
(k) is not correctly observed. In this
situation, the true position p
i
(k) is written as
p
i
(k + 1)
= p
i
(k) − α∇
i
∑
j∈N
i
(kp
i
(k) − p
j
(k)k − d
i j
(k))
2
= ˆp
i
(k) + δ
p
i
(k)
− α∇
i
∑
j∈N
i
k( ˆp
i
(k) + δ
p
i
(k)) − ( ˆp
j
(k) + δ
p
j
(k))k
−(d
0
i j
(k) + δ
d
i j
(k)
2
.
(20)
By linearizing the right-hand side of Eq (20), we ob-
tain
p
i
(k + 1)
= ˆp
i
(k) − α∇
i
∑
j∈N
i
(k ˆp
i
(k) − ˆp
j
(k)k − d
0
i j
(k))
2
+ J
p
i
(k)
δ
p
i
(k) +
∑
j∈N
i
J
p
i j
(k)
δ
p
j
(k) +
∑
j∈N
i
J
d
i j
(k)
δ
d
i j
(k),
(21)
SENSORNETS 2019 - 8th International Conference on Sensor Networks
16

where we defined
J
p
i
(k)
:=
1 0
0 1
− α
∑
j∈N
i
P
i j
, (22)
J
p
i j
(k)
:= αP
i j
, (23)
P
i j
:=
1 −
d
i j
(k) ˆy
i j
(k)
2
k ˆp
i j
(k)k
3
d
i j
(k) ˆx
i j
(k) ˆy
i j
(k)
k ˆp
i j
(k)k
3
d
i j
(k) ˆx
i j
(k) ˆy
i j
(k)
k ˆp
i j
(k)k
3
1 −
d
i j
(k) ˆx
i j
(k)
2
k ˆp
i j
(k)k
3
, (24)
J
d
i j
(k)
:= α
ˆx
i j
(k)
k ˆp
i j
(k)k
ˆy
i j
(k)
k ˆp
i j
(k)k
, (25)
ˆx
i j
(k) := ˆx
i
(k) − ˆx
j
(k), (26)
ˆy
i j
(k) := ˆy
i
(k) − ˆy
j
(k), (27)
ˆp
i j
(k) := ˆp
i
(k) − ˆp
j
(k). (28)
Therefore, the estimation error δ
p
i
(k + 1) resulting
from Eq. (11) is written as:
δ
p
i
(k + 1)
:= p
i
(k + 1) − ˆp
i
(k + 1)
≈ J
p
i
(k)
δ
p
i
(k) +
∑
j∈N
i
J
p
i j
(k)
δ
p
j
(k) +
∑
j∈N
i
J
d
i j
(k)
δ
d
i j
(k).
(29)
As in the previous subsection, the following as-
sumptions are made in order to obtain an approximate
representation of error variance: (i) For all i ∈ N , the
estimated error of position δ
p
i
(k) is a random vari-
able, and its distribution is Gaussian with an average
of 0 and a variance of
ˆ
V
p
i
(k). (ii) δ
d
i j
(k) is also a
random variable that follows the Gaussian distribu-
tion N(0,V
d
i j
). (iii) δ
p
i
(k), δ
d
i j
(k) are independent.
Then, if we know
ˆ
V
p
i
(0) and V
d
i j
for all i, j ∈ N ,
the error variance of estimated position at time k + 1
is approximated as:
ˆ
V
p
i
(k + 1) = J
p
i
(k)
ˆ
V
p
i
(k)J
T
p
i
(k)
+
∑
j∈N
i
J
p
i j
ˆ
V
p
j
(k)J
T
p
i j
+
∑
j∈N
i
J
d
i j
(k)
V
d
i j
J
T
d
i j
(k)
.
(30)
3.3.3 Fusion of Estimated Values
We use Eq. (13) to combine the variances in the esti-
mation methods calculated above. Note that the exte-
roceptive method only estimates the position and does
not have angle information. Therefore, let the error
variance of estimated angle be infinite and define the
expanded variance
ˆ
V
s
i
(k) as
ˆ
V
s
i
(k) :=
ˆ
V
p
i
(k) 0
0 ∞
. (31)
Using this, the merged estimated value ¯s(k) is given
as the following expression:
¯s
i
(k) = ˜s
i
(k)
+ (
˜
V
s
i
(k)
−1
+
ˆ
V
s
i
(k)
−1
)
−1
ˆ
V
s
i
(k)
−1
( ˆs
i
(k) − ˜s
i
(k)).
(32)
4 NUMERICAL EXAMPLES
In this section, we show several numerical results for
various practical situations in order to compare the es-
timation performances of the proprioceptive method,
exteroceptive method, and a method of “fusing” the
two values.
When the position of robot i at time k is written
as p
i
(k) and the estimated position is written as ˜p
i
(k),
the following two indices are considered for evaluat-
ing the estimation quality:
(i) Function J
1
that represents the distance between
the estimated value and the true value:
J
1
=
1
N
∑
i∈N
kp
i
(k) − ˆp
j
(k)k. (33)
(ii) Function J
2
representing the consistency with re-
spect to observed distance:
J
2
=
1
N
∑
i∈N , j∈N
i
|k ˆp
i
(k) − ˆp
j
(k)k − d
i j
(k)|, (34)
We also consider the mean over the calculation time,
¯
J
1
=
1
K
K
∑
k=0
J
1
, (35)
¯
J
2
=
1
K
K
∑
k=0
J
2
, (36)
where K ∈ N represents the termination time of the
simulation.
The parameters commonly set in this section are
as follows: We first assume the communicable dis-
tance D is equal to 5.0. In the dynamics of the robot
Eq. (1), the sampling period ε, which should be suffi-
ciently small compared to a typical velocity of robots
(in the following simulation, velocity is typically set
to 5.0), is assumed that ε = 0.01. In the exterocep-
tive method, the step length of the gradient method
is α = 0.1, which is a reasonable choice because the
typical length-scale of our system is the communica-
ble distance D. Unless otherwise stated, the following
values are used for the error variance of signal used in
Distributed Range-based Localization for Swarm Robot Systems using Sensor-fusion Technique
17

Figure 1: Trajectories of nine robots. All robots are shown
stopped at their initial position. The positions estimated by
the proposed method (purple circle) are compared to the ac-
tual location (orange square). The positions estimated by
the exteroceptive method only (green star) and the proprio-
ceptive method only (blue triangle) are also shown for com-
parison.
the fusion of the weights in the proposed method:
˜
V
p
i
(0) = diag(0.09, 0.09), (37)
ˆ
V
p
i
(0) = diag(0.09, 0.09), (38)
V
u
i
= diag(0.04, 0.04), (39)
V
d
i j
= 0.09, (40)
Here it should be noted that, in the numerical calcu-
lations, the white noise following the Gaussian distri-
bution whose average is 0 and whose variance is rep-
resented by Eqs. (37)-(40) is supposed to be applied
additively.
4.1 Performance in the Stationary Case
In this subsection, we report on a comparison of po-
sition estimation performance for a swarm consist-
ing of nine robots. The initial positions were set
in a lattice pattern, that is, x
i
(0) ∈ {−2.0, 0.0, 2.0},
y
i
(0) ∈ {−2.0, 0.0, 2.0}. The input of all robots was
set to 0:
u
i
(k) =
0.0 0.0
T
. (41)
Figure 1 shows the trajectory of each estimated
robot position using all three estimation methods. In
the proprioceptive method, since the initial estima-
tion state is not updated, an estimation error appears
and increases steadily. The exteroceptive method esti-
mates a value deviating from the true value due to the
influence of the observed distance error. In contrast,
the proposed method estimates values very close to
the true positions.
In Fig. 2, the time responses of the two evaluation
functions J
1
, J
2
defined by Eqs. (33), (34) are shown.
Table 1: Elapsed time of 1000 step simulation in the sta-
tionary case.
Method Elapsed time [s]
proprioceptive 5.66
exteroceptive 7.23
proposed 13.84
Fig. 2 shows that the proposed method estimates po-
sitions closer to their true values than both the pro-
prioceptive and exteroceptive methods. In particular,
in Fig. 2-(a), it can be seen that the error of the ex-
teroceptive method is large, whereas the error is sup-
pressed in the proposed method. This reflects the pro-
prioceptive information that the robots are at rest at
their initial positions.
We have also checked the computational time
for each estimation method. Table 1 compares the
elapsed time of 1000 step simulation. It shows that
the time taken in the proposed method is almost equal
to the sum of those taken in the other two methods,
confirming that the combination of the two methods
does not cause any unreasonable overhead.
4.2 Performance in the Dynamic Case
As in Sec. 4.1, nine robots are arranged in a grid
pattern. Three units of y
i
(0) = −2 turn to the left,
three units of y
i
(0) = 2 turn to the right, and three
units y
i
(0) = 0 remain at rest on their initial posi-
tions. Specifically, the input u
i
(k) to each robot is
represented by
u
i
(k) =
h
0.0 0.0
i
T
for y
i
(0) = 0,
h
5.0 5.0
i
T
for y
i
(0) = −2,
h
5.0 −5.0
i
T
for y
i
(0) = 2.
(42)
Fig. 3 shows the trajectories of each estimated robot
position obtained by the three estimation methods.
Here, it can be seen that the proposed method posi-
tion estimates are somewhat more accurate than the
other two methods. The estimated value of the pro-
prioceptive method is biased over the entire time due
to the influence of the initial error and input noise.
The exteroceptive method estimates a value deviating
from the true value because of the observed distance
error influence.
Figure 4 plots the time responses of two evalua-
tion functions J
1
, J
2
defined by Eqs. (33), (34), which
again confirm the accurate estimation of the proposed
method compared to both the proprioceptive and ex-
teroceptive methods.
We have also checked the computational time for
this case. Table 2 shows the elapsed time of 1000 step
SENSORNETS 2019 - 8th International Conference on Sensor Networks
18

0 200 400 600 800 1000
k
0.0
0.2
0.4
0.6
0.8
J
2
exteroceptive
proprioceptive
proposed
0 200 400 600 800 1000
k
0.05
0.10
0.15
0.20
0.25
0.30
0.35
J
1
exteroceptive
proprioceptive
proposed
(a) (b)
Figure 2: Histories of two evaluation functions: (a) J
1
, (b) J
2
. The value of the present method (purple solid) is compared to
that of the exteroceptive method (green dashed) and of the proprioceptive method (blue dash-dot).
Figure 3: Trajectories of nine robots. Three units of y
i
(0) =
−2 turn to the left, three units of y
i
(0) = 2 turn to the right,
and three units y
i
(0) = 0 remain on their initial positions.
The positions estimated by the proposed method (purple
circle) are compared to the actual location (orange square).
The positions estimated by the exteroceptive method only
(green star) and the proprioceptive method only (blue trian-
gle) are also shown for comparison.
Table 2: Elapsed time of 1000 step simulation in the dy-
namic case.
Method Elapsed time [s]
proprioceptive 5.99
exteroceptive
6.67
proposed 11.68
simulation for each estimation method. Similarly to
the previous subsection, the time taken for the pro-
posed method is about the same as the sum of the time
taken for the component methods.
4.3 Input Noise Effect
Here we examine the performance while varying
the magnitude of the standard deviation σ
u
(V
u
i
=
diag(σ
2
u
, σ
2
u
)) of the noise applied to input u
i
(∀i ∈
N ). The initial positions and inputs are the same as
in Sec. 4.2.
In Fig. 5, the value of two evaluation functions
¯
J
1
,
¯
J
2
defined as Eqs. (35), (36) with respect to σ
u
are
shown. The termination time is K = 200 unless oth-
erwise is stated.
Figure 5-(a) shows that, when σ
u
is small in the
proposed method, the value of Eq. (35) is also small.
However, as σ
u
gets larger, it approaches the value of
Eq. (35) in the exteroceptive method. This is because
of the weight adjustment function, which puts higher
weight on the exteroceptive information than on the
proprioceptive information, as the variance of the in-
put noise increases. On the other hand, in Fig. 5-(b),
the proposed method makes the evaluation function
J
2
small even when σ
u
is large. Thus, we can con-
clude that our proposed method gives a value that is
most consistent with the geometric relationship of all
robots.
4.4 Observation Noise Effect
Next, we investigate the impact of the applied noise
by examining the observed distance d
i j
(∀i ∈ N , j ∈
N
i
) while changing the magnitude of the standard de-
viation σ
d
. The initial positions and inputs are the
same as in Sec. 4.2.
In Fig. 6, we show the value of two evaluation
functions
¯
J
1
,
¯
J
2
defined by Eqs. (35), (36) with respect
to σ
d
. The estimation accuracy degrades as the noise
increases in the exteroceptive method. On the other
hand, in the proprioceptive and proposed methods, no
remarkable adverse effect is observed. In addition,
in Figs. 6-(a), (b), regardless of the value of σ
d
, the
proposed method takes a smaller value than the pro-
prioceptive estimate. These results allow us to con-
clude that the proposed method is the most robust of
the three methods against observed distance errors.
Distributed Range-based Localization for Swarm Robot Systems using Sensor-fusion Technique
19

0 200 400 600 800 1000
k
0
2
4
6
8
J
2
exteroceptive
proprioceptive
proposed
(a) (b)
0 200 400 600 800 1000
k
0.5
1.0
1.5
2.0
2.5
J
1
exteroceptive
proprioceptive
proposed
(a)
Figure 4: Histories of two evaluation functions: (a) J
1
, (b) J
2
. The value of the present method (purple solid) is compared to
that of the exteroceptive method (green dashed) and of the proprioceptive method (blue dash-dot).
0.0 0.2 0.4 0.6 0.8 1.0
σ
u
0
1
2
3
¯
J
2
exteroceptive
proprioceptive
proposed
0.0 0.2 0.4 0.6 0.8 1.0
σ
u
0.1
0.2
0.3
0.4
0.5
0.6
¯
J
1
exteroceptive
proprioceptive
proposed
(a) (b)
Figure 5: Value of two evaluation functions: (a)
¯
J
1
, (b)
¯
J
2
, compared with the magnitude of input noise σ
u
. Each line
represents the average value obtained when the numerical calculation was performed 10 times, and the length of the vertical
bar represents the standard deviation of 10 times. The value of the present method (purple solid) is compared to that of the
exteroceptive method (green dashed) and of the proprioceptive method (blue dash-dot).
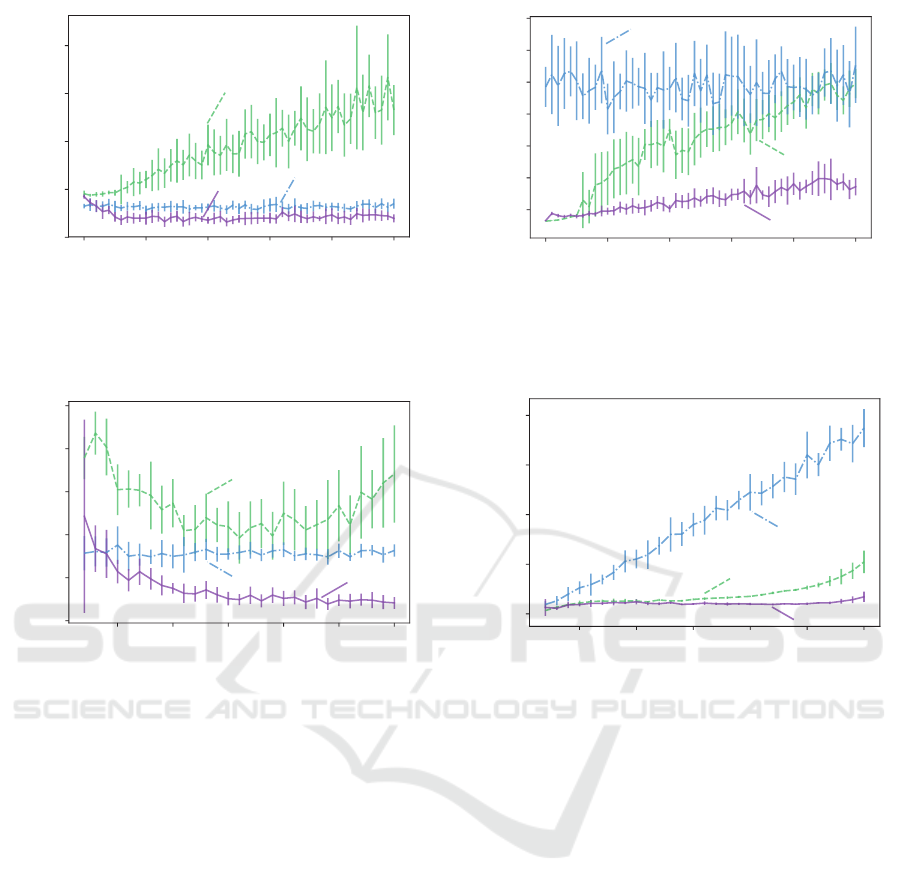
4.5 Effect of the Number of Robots
Finally, we examine the effect of the number of robots
N on the estimation performance. The initial configu-
ration of the robots is generated as a uniform random
number taking a value range in (−2.5, 2.5)
2
. The in-
put u
i
(k) to each robot is defined by
u
i
(k) =
h
0.0 0.0
i
T
for i = 3n (n ∈ N),
h
5.0 5.0
i
T
for i = 3n + 1 (n ∈ N),
h
5.0 −5.0
i
T
for i = 3n + 2 (n ∈ N).
(43)
The values of two evaluation functions
¯
J
1
,
¯
J
2
de-
fined in Eqs. (35), (36) with respect to N are shown
in Fig. 7. As in Fig. 7-(a), the error of the proposed
method decreases as N increases. This accuracy im-
provement stems from the fact that each robot has
larger amounts of information for larger N. In Fig. 7-
(b),
¯
J
2
increases as the value of N increases in all
estimation methods. This is because the evaluation
function consists of the sum of i and j, which in-
creases J
2
with order O(N). Note that this is simply
the sum of errors over N while the accuracy is held
fixed and does not indicate performance degradation.
In Figs. 7-(a), (b), regardless of the value of N, the
proposed method yields a smaller value than the other
two methods. These results confirm the higher robust-
ness of the proposed method against an increase in the
number of robots.
5 CONCLUSION
In this paper, we proposed a self-position estimate
method that uses the distance between the agents
of swarm robot systems. We began by presuming
that none of the robots were equipped with GPS or
wheel encoders, but were capable of measuring their
distances from neighboring robots. The proposed
method linearly combines two estimated values, one
obtained by means of the distributed gradient method
ˆs
i
(k) and the other from the robot dynamics ˜s
i
(k). The
SENSORNETS 2019 - 8th International Conference on Sensor Networks
20
0.0 0.2 0.4 0.6 0.8 1.0
σ
d
0.5
1.0
1.5
2.0
2.5
3.0
3.5
¯
J
2
exteroceptive
proprioceptive
proposed
0.0 0.2 0.4 0.6 0.8 1.0
σ
d
0.0
0.5
1.0
1.5
2.0
¯
J
1
exteroceptive
proprioceptive
proposed
(a) (b)
Figure 6: Value of two evaluation functions: (a)
¯
J
1
, (b)
¯
J
2
, compared with the magnitude of observation noise σ
d
. Each
line represents the average value when the numerical calculation was performed 10 times, and the length of the vertical bar
represents the standard deviation of 10 times. The value of the present method (purple solid) is compared to that of the
exteroceptive method (green dashed) and of the proprioceptive method (blue dash-dot).
5 10 15 20 25 30
N
0
2
4
6
8
¯
J
2
exteroceptive
proprioceptive
proposed
5 10 15 20 25 30
N
0.0
0.2
0.4
0.6
0.8
1.0
¯
J
1
exteroceptive
proprioceptive
proposed
(a) (b)
Figure 7: Values of two evaluation functions: (a)
¯
J
1
, (b)
¯
J
2
, compared with the magnitude of the number of robots N. Each
line represents the average value when a numerical calculation was performed 10 times, and the length of the vertical bar
represents the standard deviation of the 10 calculation results. The value of the present method (purple solid) is compared to
that of the exteroceptive method (green dashed) and that of the proprioceptive method (blue dash-dot).
weight in combination is determined in a way that
ensures the error variance is minimized, as shown in
Eq. (32). That is, in situations where the exteroceptive
method is more reliable, it increases autonomously
the weight of ˆs
i
(k).
We then performed numerical simulations for var-
ious practical situations and verified the performance
of our proposed algorithm. Specifically, we consid-
ered situations with (i) robots at rest, (ii) moving
robots, (iii) varying input noise, (iv) varying observa-
tion noise, and (v) different numbers of robots. In all
cases, we confirmed that the proposed method enables
us to estimate positions more accurately than both the
proprioceptive and exteroceptive methods.
One of the extensions of our investigation would
be comparison with other recent methods such as one
in (Martinelli et al., 2005). In addition, implementa-
tion of the proposed method using real robots and ex-
perimental evaluation of the performance are also in
the scope of our future studies. We also plan to ver-
ify the control performance of the proposed method
when combined with existing control algorithms for
swarm robot systems.
REFERENCES
Bandyopadhyay, S., Chung, S.-J., and Hadaegh, F. Y.
(2017). Probabilistic and distributed control of a large-
scale swarm of autonomous agents. IEEE Transac-
tions on Robotics, 33(5):1103–1123.
Barca, J. C. and Sekercioglu, Y. A. (2013). Swarm robotics
reviewed. Robotica, 31(3):345–359.
Biswas, P., Liang, T.-C., Toh, K.-C., Ye, Y., and Wang, T.-
C. (2006). Semidefinite programming approaches for
sensor network localization with noisy distance mea-
surements. IEEE transactions on automation science
and engineering, 3(4):360–371.
Blais, F. (2004). Review of 20 years of range sensor de-
velopment. Journal of electronic imaging, 13(1):231–
244.
Brambilla, M., Ferrante, E., Birattari, M., and Dorigo, M.
Distributed Range-based Localization for Swarm Robot Systems using Sensor-fusion Technique
21

(2013). Swarm robotics: A review from the swarm
engineering perspective. Swarm Intelligence, 7(1):1–
41.
Calafiore, G. C., Carlone, L., and Wei, M. (2010). Dis-
tributed optimization techniques for range localization
in networked systems. In 49th IEEE Conference on
Decision and Control (CDC), pages 2221–2226.
Cao, Y. U., Fukunaga, A. S., and Kahng, A. (1997). Coop-
erative mobile robotics: Antecedents and directions.
Autonomous robots, 4(1):7–27.
Castillo, O., Mart
´
ınez-Marroqu
´
ın, R., Melin, P., Valdez,
F., and Soria, J. (2012). Comparative study of bio-
inspired algorithms applied to the optimization of
type-1 and type-2 fuzzy controllers for an autonomous
mobile robot. Information sciences, 192:19–38.
Cheah, C. C., Hou, S. P., and Slotine, J. J. E. (2009).
Region-based shape control for a swarm of robots. Au-
tomatica, 45(10):2406–2411.
Choi, B. S., Lee, J. W., Lee, J. J., and Park, K. T. (2011). A
Hierarchical Algorithm for Indoor Mobile Robot Lo-
calization Using RFID Sensor Fusion. IEEE Transac-
tions on Industrial Electronics, 58(6):2226–2235.
Deming, R. (2005). Sensor fusion for swarms of unmanned
aerial vehicles using modeling field theory. In Inter-
national Conference on Integration of Knowledge In-
tensive Multi-Agent Systems, 2005., pages 122–127.
Dil, B., Dulman, S., and Havinga, P. (2006). Range-based
localization in mobile sensor networks. In European
Workshop on Wireless Sensor Networks, pages 164–
179. Springer.
Eren, T., Goldenberg, O. K., Whiteley, W., Yang, Y. R.,
Morse, A. S., Anderson, B. D. O., and Belhumeur,
P. N. (2004). Rigidity, computation, and random-
ization in network localization. In IEEE INFOCOM
2004, volume 4, pages 2673–2684 vol.4.
Gustafsson, F. (2010). Statistical Sensor Fusion. Studentlit-
teratur.
Kourogi, M., Sakata, N., Okuma, T., and Kurata, T. (2006).
Indoor/outdoor pedestrian navigation with an embed-
ded GPS/RFID/self-contained sensor system. In Ad-
vances in Artificial Reality and Tele-Existence, pages
1310–1321. Springer.
La, H. M. and Sheng, W. (2013). Distributed Sensor Fusion
for Scalar Field Mapping Using Mobile Sensor Net-
works. IEEE Transactions on Cybernetics, 43(2):766–
778.
Luo, W., Zhao, X., and Kim, T.-K. (2014). Multiple object
tracking: A review. arXiv preprint arXiv:1409.7618,
1.
Mao, G., Drake, S., and Anderson, B. D. O. (2007). De-
sign of an Extended Kalman Filter for UAV Local-
ization. In 2007 Information, Decision and Control,
pages 224–229.
Martinelli, A., Pont, F., and Siegwart, R. (2005). Multi-
Robot Localization Using Relative Observations. In
Proceedings of the 2005 IEEE International Confer-
ence on Robotics and Automation, pages 2797–2802.
Moore, D., Leonard, J., Rus, D., and Teller, S. (2004).
Robust Distributed Network Localization with Noisy
Range Measurements. In Proceedings of the 2Nd In-
ternational Conference on Embedded Networked Sen-
sor Systems, SenSys ’04, pages 50–61, Baltimore,
MD, USA. ACM.
Nocedal, J. (2006). Numerical Optimization. Springer.
Rubenstein, M., Ahler, C., and Nagpal, R. (2012). Kilo-
bot: A low cost scalable robot system for collective
behaviors. In 2012 IEEE International Conference on
Robotics and Automation, pages 3293–3298.
Rubenstein, M. and Shen, W. M. (2009). Scalable self-
assembly and self-repair in a collective of robots. In
2009 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems, pages 1484–1489.
Sahin, E. (2004). Swarm robotics: From sources of inspira-
tion to domains of application. In International Work-
shop on Swarm Robotics, pages 10–20. Springer.
Shang, Y., Rumi, W., Zhang, Y., and Fromherz, M. (2004).
Localization from connectivity in sensor networks.
IEEE Transactions on Parallel and Distributed Sys-
tems, 15(11):961–974.
Shang, Y. and Ruml, W. (2004). Improved MDS-based lo-
calization. In IEEE INFOCOM 2004, volume 4, pages
2640–2651 vol.4.
Spears, W. M., Spears, D. F., Hamann, J. C., and Heil, R.
(2004). Distributed, physics-based control of swarms
of vehicles. Autonomous Robots, 17(2-3):137–162.
Tan, Y. (2015). Handbook of Research on Design, Control,
and Modeling of Swarm Robotics. IGI Global, Her-
shey, PA, USA, 1st edition.
Wang, H. and Guo, Y. (2008). A decentralized control for
mobile sensor network effective coverage. In 2008 7th
World Congress on Intelligent Control and Automa-
tion, pages 473–478. IEEE.
Xie, G. and Wang, L. (2007). Consensus control for a class
of networks of dynamic agents. International Jour-
nal of Robust and Nonlinear Control: IFAC-Affiliated
Journal, 17(10-11):941–959.
Zhou, C., Xu, T., and Dong, H. (2015). Distributed locating
algorithm MDS-MAP (LF) based on low-frequency
signal. Computer Science and Information Systems,
12(4):1289–1305.
SENSORNETS 2019 - 8th International Conference on Sensor Networks
22
