Two-layer Residual Feature Fusion for Object Detection
Jaeseok Choi
1
, Kyoungmin Lee
2
, Jisoo Jeong
1
and Nojun Kwak
1
1
Seoul National University, Seoul, Korea
2
SK Holdings, Seoul, Korea
Keywords:
Object Detection, Computer Vision, Machine Learning, Neural Network, Deep Learning.
Abstract:
Recently, a lot of single stage detectors using multi-scale features have been actively proposed. They are much
faster than two stage detectors that use region proposal networks (RPN) without much degradation in the de-
tection performances. However, the feature maps in the lower layers close to the input which are responsible
for detecting small objects in a single stage detector have a problem of insufficient representation power be-
cause they are too shallow. There is also a structural contradiction that the feature maps not only have to deliver
low-level information to next layers but also have to contain high-level abstraction for prediction. In this paper,
we propose a method to enrich the representation power of feature maps using a new feature fusion method
which makes use of the information from the consecutive layer. It also adopts a unified prediction module
which has an enhanced generalization performance. The proposed method enables more precise prediction,
which achieved higher or compatible score than other competitors such as SSD and DSSD on PASCAL VOC
and MS COCO. In addition, it maintains the advantage of fast computation of a single stage detector, which
requires much less computation than other detectors with similar performance.
1 INTRODUCTION
The development of deep neural networks (DNN) in
recent years has achieved remarkable results not only
in object detection but also in many other areas. In the
early researches of object detection using DNN, much
attention has been paid to representation learning that
can replace hand-crafted features without much con-
sideration on the speed of detectors. Recently, real-
time detectors with low computational complexities
have been actively researched.
Researches on two-stage detectors, mostly based
on Faster R-CNN (Ren et al., 2015), applied the re-
gion proposal network (RPN) and RoI pooling to the
feature maps extracted by a state-of-the-art classifier,
such as ResNet-101 (He et al., 2016). On the other
hand, the single-stage methods such as YOLO (Red-
mon et al., 2016) and SSD (Liu et al., 2016) removed
RoI pooling layer and predict bounding boxes and
corresponding class confidences directly while en-
abling faster detection and end-to-end learning.
Especially SSD makes use of multi-scale feature
maps generated from a backbone network such as
VGG-16 (Simonyan and Zisserman, 2014) to detect
objects in various sizes. Since each of the predic-
*J. Choi and K. Lee equally contributed to this work
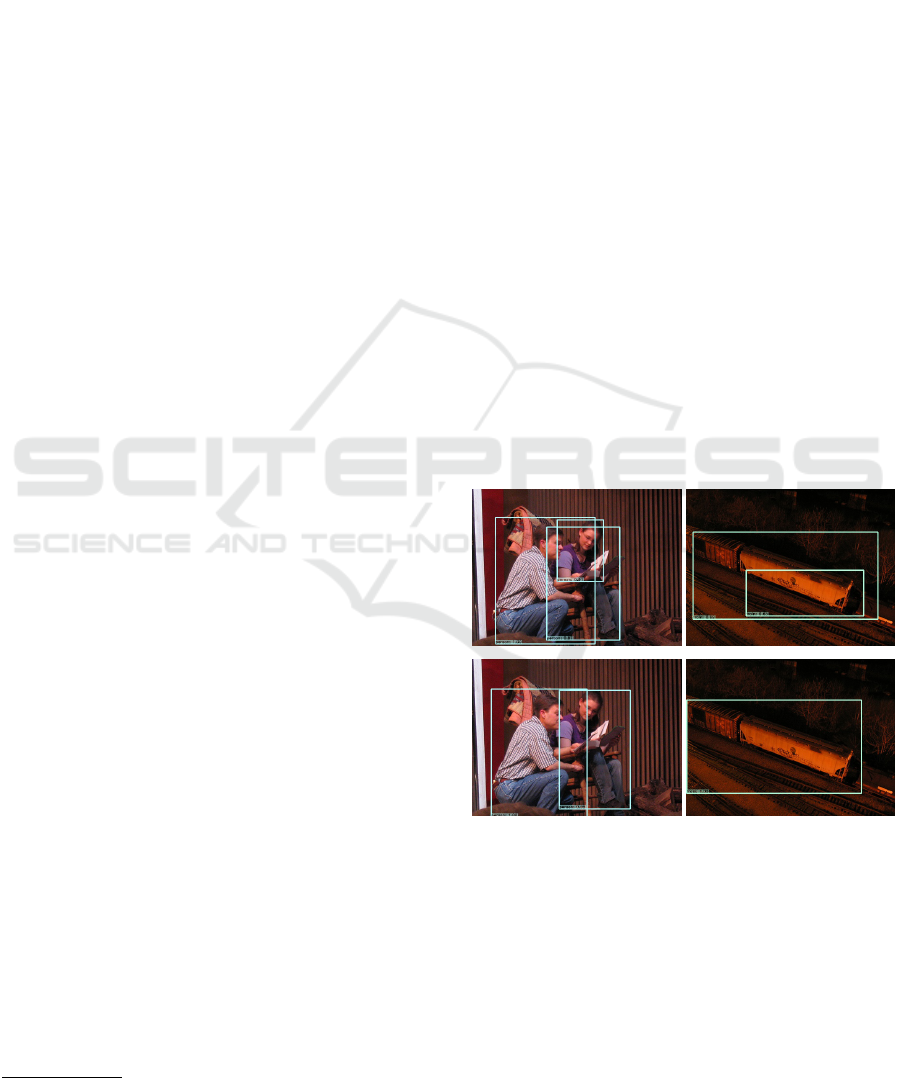
Figure 1: Box-in-Box problem. Top: SSD300. Bottom:
RUN300 (proposed). SSD detects objects with overlapping
boxes which are redundant. RUN solves this problem by
utilizing the proposed two-layer feature fusion method and
unified prediction module.
tion modules composed of 3 × 3 convolution fil-
ters detects bounding boxes on each layer separately,
they cannot reflect appropriate contextual information
from different scales. It causes the problem named as
“Box-in-Box” (Jeong et al., 2017) as shown in Fig-
ure 1. In the figure, we can see that SSD often detects
352
Choi, J., Lee, K., Jeong, J. and Kwak, N.
Two-layer Residual Feature Fusion for Object Detection.
DOI: 10.5220/0007306803520359
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 352-359
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

a single object with two overlapping boxes, of which
the smaller box contains partial image such as the up-
per body of a person or the front of a train.
To solve the problem, (Fu et al., 2017; Lin et al.,
2017) used ResNet and feature pyramid network
(FPN) (Lin et al., 2016) structure to inject larger con-
textual information through deep convolutional back-
bone by the use of deconvolution. However, these
structures have the disadvantage of increased com-
putational complexity, thus reduces detection speed,
which is a key advantage of a single-stage detector.
In this paper, we propose a method to solve the es-
sential problems of multi-scale single stage detectors.
More specifically, we introduce a single-stage object
detector using a feature fusion method which con-
nects just two consecutive layers. The proposed two-
layer feature fusion network has a structure where
the Resblock (He et al., 2016) and the deconvolution
layer are added on the multi-scale feature maps. It
makes detected boxes be determined with larger con-
text and be more reliable. In addition, we also adopt
a unified prediction module (Jeong et al., 2017; Lin
et al., 2017) by integrating multiple prediction mod-
ules, that had been applied separately to each layer,
into one to boost the information level of feature maps
in the earlier layers. The proposed network is named
as RUN which is an abbreviation for two-layer Resid-
ual feature fusion with Unified prediction Network.
It is not only very compact and fast compared to
other ResNet-based two-stage detectors , but it also
achieves superior or competitive performance com-
pared to other competitors.
2 RELATED WORKS
Overfeat (Sermanet et al., 2013), SPPNet (He et al.,
2014), R-CNN (Girshick et al., 2014), Fast R-CNN
(Girshick, 2015), Faster R-CNN (Ren et al., 2015)
and R-FCN (Li et al., 2016) which are classified
as region-based convolutional neural networks (R-
CNN) showed a tremendous improvement in per-
formance compared to the previous object detec-
tion techniques. These region-based approaches have
achieved huge advances over the last few years and
are still the state-of-the-art approaches among many
object detection techniques. Specifically, these ap-
proaches usually use a two-stage method of generat-
ing a number of bounding boxes and then assigning
a classification score to the bounding boxes. Thus, al-
though classification may be relatively accurate, these
are too slow to be used for real-time applications.
Redmon (Redmon et al., 2016) proposed a method
named as YOLO to predict bounding boxes and asso-
ciated class probabilities in a single step by framing
object detection as a regression problem. It divides in-
put images to grid maps and regresses bounding boxes
for multiple objects on each grid. This was the be-
ginning of single stage detection and subsequently in-
spired structures such as SSD (Liu et al., 2016). How-
ever, since YOLO uses only the highest-level
1
feature
maps for object detection, there is a lack of lower-
level information, which results in somewhat inaccu-
rate detections, especially for small objects.
In order to solve this problem, SSD (Liu et al.,
2016) utilized not only the highest-level features but
also lower-level features which have enough resolu-
tion to detect small objects. As mentioned in Inside-
Outside Net (ION) (Bell et al., 2016) and HyperNet
(Kong et al., 2016), each feature maps at different lay-
ers have different abstraction levels for an input im-
age. Therefore, it is clear that using multi-scale fea-
ture maps can improve detection performance for ob-
jects of various scales. In SSD, many default boxes
are created in the feature maps and bounding box re-
gression and classification are performed for each box
area using 3× 3 convolutions. This method enables
multi-scale object detection without using RoI pool-
ing. In addition, it can effectively improve the detec-
tion accuracy of small objects which is a disadvantage
of YOLO (Redmon et al., 2016).
However, as mentioned in MS-CNN (Cai et al.,
2016), SSD has the problem that back-propagation
allows the gradient to cause unnecessary deforma-
tions in the feature maps since the feature maps of
the backbone network are used directly in bounding
box regression and classification. Then, it can lead
to some instability during learning. In addition, since
each classifier only uses single scale feature maps, it
cannot reflect larger or smaller contextual information
other than the one for the corresponding scale.
Recently, various methods have attempted to en-
hance the contextual information of each layer while
taking advantage of SSD (Liu et al., 2016). DSSD (Fu
et al., 2017) could obtain higher accuracy by changing
the base network to ResNet-101 (He et al., 2016) and
combining the FPN (Lin et al., 2016) using deconvo-
lution layers in combination with the existing multiple
layers to reflect the large scale context. However, with
the use of deep structure of ResNet-101 and decon-
volution layers, the processing speed degrades much
(under 16.4 images per second), which prohibits the
method to be used for real-time detection problems.
Rainbow SSD (R-SSD) (Jeong et al., 2017) pro-
posed a method to concatenate feature maps not
1
In this paper, the term level is used interchangeably
with layer. Highest level indicates the the farthest layer
from the input layer.
Two-layer Residual Feature Fusion for Object Detection
353
Image
Multi-scale feature maps
Convolutional backbone
Cls
Loc Regress
Cls
Loc Regress
Cls
Loc Regress
Cls
Loc Regress
Image
Multi-scale feature maps
Unified
Prediction
Module
Convolutional backbone
Cls
Loc Regress
3Way
ResBlock
3Way
ResBlock
3Way
ResBlock
2Way
ResBlock
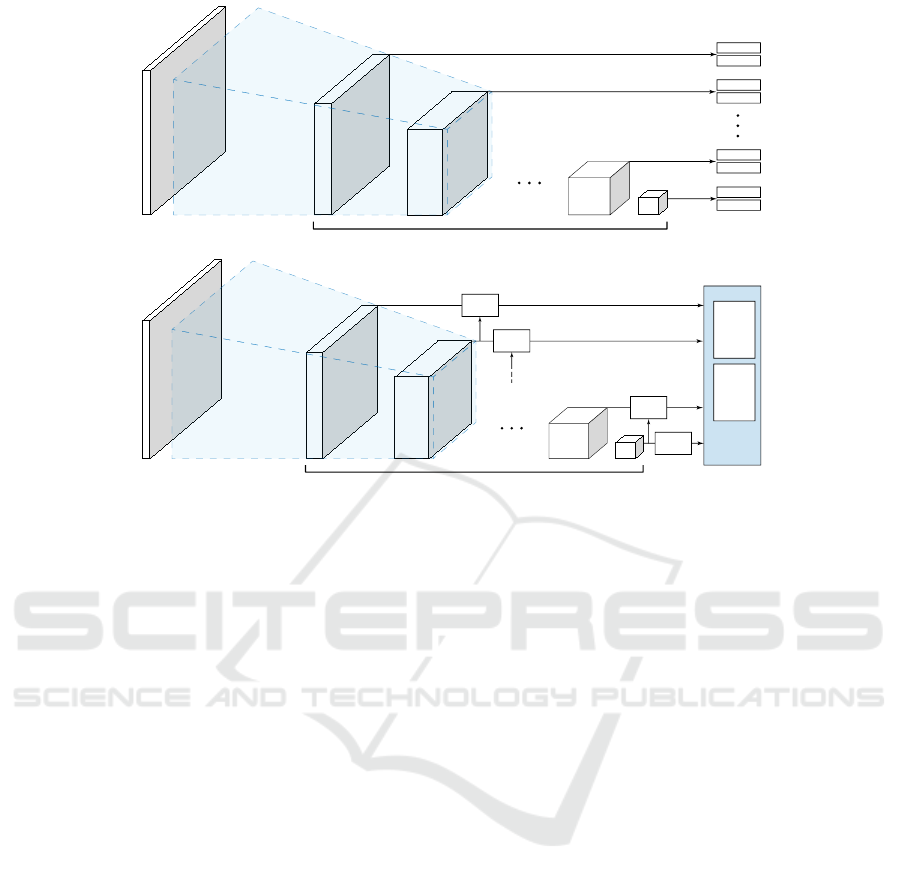
Figure 2: Architectures of SSD and the proposed RUN. Top: SSD. Bottom: the proposed RUN. Compared with SSD, the
proposed structure has residual blocks and unified prediction module. The arrow from the bottom to the top indicates the
deconvolution branch.
only in the adjacent layers but also in all the layers
for bounding box regression and classification using
pooling and deconvolution. It achieves higher perfor-
mance than SSD by enhancing representation power
of feature maps. Also, by making the dimension of
each layer the same, it was made possible to use a uni-
fied prediction module instead of different prediction
modules for different layers. Woo (Woo et al., 2017)
proposed StairNet which utilizes both FPN (Lin et al.,
2016) structure of base VGG-16 network and unified
prediction of R-SSD.
3 THE PROPOSED
ARCHITECTURE
3.1 Two-layer Feature Fusion
Recent CNN models designed for object detection
makes use of a backbone network which is origi-
nally devised to solve image classification problems.
Although the detection network can be trained end-
to-end, the backbone network is normally initialized
with the weights for the image classification prob-
lems. The relation between the features and predic-
tions in the networks used for image classification can
be expressed mathematically as follows:
x
n
= F
n
(x
n−1
) = (F
n
◦ F
n−1
◦ ··· ◦ F
1
)(I) (1)
Scores = P (x
n
), (2)
where I is an input image, x
n
is the n
th
-level feature
map, P is a prediction function, and F
n
is a combi-
nation of non-linear transformations such as convolu-
tion, pooling, ReLU, etc. Here, the top feature map,
x
n
, learns information on high-level abstraction. On
the other hand, x
k
(k < n) has more local and low-
level information as k becomes smaller.
SSD (Liu et al., 2016) applies several feature maps
with different scales directly as an input to separate
prediction modules to calculate object positions and
classification scores, which can be denoted by the fol-
lowing equation:
Detection =
P
1
(x
s
1
), P
2
(x
s
2
), . . . , P
k
(x
s
k
)
, (3)
where s
1
to s
k
are feature indices for source feature
maps for multi-scale prediction, P
k
is a function that
outputs multiple objects with different positions and
scores. Combining (1) and (3), it can be expressed as
Detection = {P
1
(x
s
1
), P
2
(F
s
2
s
1
(x
s
1
)). . . , P
k
(F
s
k
s
1
(x
s
1
))},
(4)
where F
b
a
(x
a
) , (F
b
◦ ·· · ◦ F
a+1
)(x
a
). Here, the ear-
lier feature map x
s
1
needs to learn high-level abstrac-
tion to improve the performance of P
1
(x
s
1
). At the
same time, it also needs to learn local features for ef-
ficient information transfer to the next feature maps.
This not only makes learning difficult, but also causes
the overall performance to decrease. It is also a prob-
lem in the above-mentioned hourglass structure.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
354
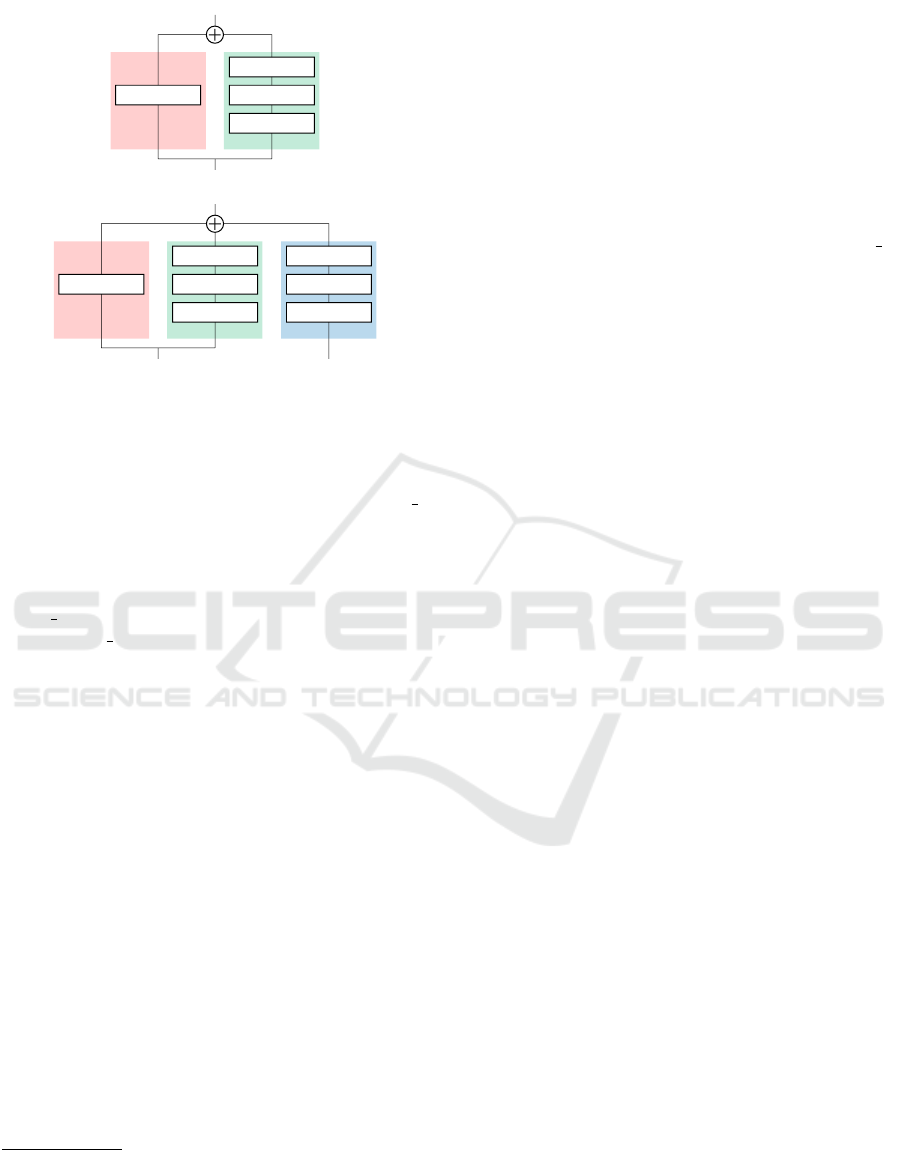
1x1x256 conv
1x1x128 conv
3x3x128 conv1x1x256 conv
branch2 branch1
HxWxD
1
feature
HxWx256
feature
1x1x256 conv
1x1x128 conv
3x3x128 conv1x1x256 conv
branch2
1x1x256 conv
3x3x128 conv
d=128 deconv
branch3 branch1
HxWxD
1
feature H/2xW/2xD
2
feature
HxWx256
feature
Figure 3: Feature fusion module. Top: 2-way Res-
block. Bottom: 3-way Resblock with deconvolution branch
(branch3).
To resolve this problem, SSD (Liu et al., 2016)
added L2 normalization layer between the conv4 3
layer and the prediction module, which results in a
reduced magnitude of the gradients from the predic-
tion module. Cai (Cai et al., 2016) tried to solve this
problem by adding a convolution layer only to the
conv4
3 layer. Since the above problem is not solely
on the conv4 3 layer, the aforementioned approaches
do not essentially solve the problem. To meet this con-
tradictory requirement of maintaining low-level infor-
mation while having the flexibility to learn high-level
abstraction, it is desired to separate and decouple the
backbone network and the prediction module in the
training phase.
In order to solve the same problem, we propose
a new architecture that decouples backbone network
from the prediction module as shown in Figure 2. In-
stead of directly connecting the feature maps in the
backbone network to the prediction module, we in-
serted a multi-way Resblock
2
for each level of fea-
ture maps, which acts like a bumper that secures the
information in the backbone network from the pre-
diction modules. The detailed architecture of the pro-
posed multi-way Resblocks are shown in Figure 3.
Convolution layers and nonlinear activation units
are used for all branches of the proposed Resblock.
This prevents the gradients of the prediction mod-
ule from flowing directly into the feature maps of the
backbone network. Also, it clearly distinguishes the
2
Here, we term the basic components of our feature fu-
sion architecture as Resblocks which are slightly different
from those in ResNets (He et al., 2016) in that instead of
identity mapping, 1 × 1 convolution is used as shown in the
red boxes in Figure 3.
features to be used for prediction from the features to
be delivered to the next layer. In other words, the pro-
posed Resblock takes the role of learning high-level
abstraction for object detection, while the backbone
network containing low-level features is designed to
be intact from the high-level detection information.
This design helps to improve the feature structure of
the SSD (Liu et al., 2016) by forcing it not to learn
high-level abstraction and to keep low-level image
features.
Also, the depths of the earlier layers (eg. conv4
3)
used for small-sized object detection in SSD (Liu
et al., 2016) are very shallow. Therefore, in SSD,
small objects can not be detected well because the
representation power is insufficient to be used in the
prediction as it is. To supplement this problem, we
used a 3 × 3 convolution layer in branch2 of the Res-
block as shown in Figure 3 to reflect the peripheral
contextual information.
Branch3 in the right side of Figure 3 contains a
deconvolution layer whose input is the feature maps
of the consecutive layer. This two-layer feature fu-
sion is similar to a structure proposed in (Fu et al.,
2017) and (Ren et al., 2017), and it is a proper method
to propagate large contextual information to a small
scale feature map so that even when detecting a small
object, information about its surroundings is also uti-
lized. This can reduce the cases of detecting a part of
an actual object. Thus, it can be a remedy for the box-
in-box problem described earlier. The effect of this is
intuitively shown in the right side of Figure 1. Finally,
the proposed two-layer feature fusion method in Fig-
ure 2 can be expressed as
Detection =
P
1
(
ˆ
x
s
1
,s
2
), P
2
(
ˆ
x
s
2
,s
3
), . . . , P
k
(
ˆ
x
s
k
)
,
(5)
where
ˆ
x
a,b
= B
1
(x
a
) + B
2
(x
a
) + B
3
(x
b
) and
ˆ
x
a
=
B
1
(x
a
) + B
2
(x
a
). Here, B
1
, B
2
and B
3
indicate
branch1, branch2 and branch3, respectively.
3.2 Unified Prediction Module
Detecting objects of various sizes has been recog-
nized as an important problem in object detection.
Traditionally, (Viola and Jones, 2004; Doll
´
ar et al.,
2014; Dalal and Triggs, 2005) used a single classifier
to predict multi-scale feature maps extracted from the
image pyramid. There is another approach of using
multiple classifiers on a single input image. The latter
has the advantage of reducing the amount of computa-
tion for calculating feature maps. However, it requires
an individual classifier for each object scale.
Since the neural network has been prevalent, the
two-stage detectors applied RoI Pooling to the CNN
output to extract feature maps of the same size from
Two-layer Residual Feature Fusion for Object Detection
355

Faster R-CNNa)
b)
c)
d)
single feature map object-wise cropping unified prediction
unified prediction
multi-scale feature maps multi-scale prediction
multi-scale feature maps 3-way residual features
SSD
Proposed
unified predictionmulti-scale feature maps Rainbow concatenation
R-SSD
with
One Classifier
Figure 4: Comparison of various object detection
schemes: a) R-CNN and its variants need object-wise crop-
ping and the prediction is done by a common unified clas-
sifier. b) SSD does not need any cropping but requires a
separate classifier for each scale of feature maps. c) R-SSD
concatenates feature maps in different layers so that objects
in each scale can be predicted with one unified classifier
with the same amount of information. d) In the proposed
method, Resblock takes the role of feature map concatena-
tion and one unified classifier is used for prediction.
objects of different sizes. These feature maps were
used as the input of a single classifier. Meanwhile,
other methods using multi-scale features, such as SSD
(Liu et al., 2016), adopted multiple classifiers since
feature maps in each scale differed not only in length
but also in the underlying contextual information. In
order to effectively learn the prediction layers of var-
ious scales, it is necessary to input objects of various
scales. SSD could dramatically increase the detection
performance through augmentation which transforms
the size of input images.
R-SSD (Jeong et al., 2017) proposed the Rainbow
concatenation which combines feature maps in dif-
ferent scales using pooling and deconvolution. This
allows to set the depth of the input features for
each prediction module to be the same. Thus, R-SSD
could use a single classifier that shares the weight
of multi-scale prediction modules. Similarly, the pro-
posed two-layer feature fusion through 3-way Res-
blocks enforces all the feature maps to have the same
depth of 256 as shown in Figure 3. Thus, structurally,
it is possible to unify convolution layers of differ-
ent prediction modules like R-SSD. The idea of the
unified prediction module is similar to (Jeong et al.,
2017), but our method is different from R-SSD in in-
formation contained in the input feature maps.
This approach makes differently-scaled feature
maps have similar level of information. SSD (Liu
et al., 2016) used multiple features of various scales.
This results in an improved performance of detecting
small objects compared with YOLO (Redmon et al.,
2016; Redmon and Farhadi, 2016) which used only
the last layer of the back-bone network. However,
since its earliest feature map is obtained from much
shallower layers than the later feature maps, it still has
a limitation of insufficient information for prediction.
Because unified prediction applies equally to feature
maps of all scales, it forces the output of the 3-way
Resblock between the feature map of the backbone
and the prediction module to be learned at a similar
information level. It means that unified prediction in
combination with the residual feature block makes the
feature maps in the earliest Resblocks rich in context.
In the R-SSD (Jeong et al., 2017) structure, de-
tection performance for small objects was increased
using the unified prediction module, but the overall
performance decreased. However, as shown in Table
1, the proposed RUN structure shows a meaningful
increase in overall performance due to the unified pre-
diction. This shows that our two-layer feature fusion
method using 3-way Resblock is more suitable for
unified prediction than the feature fusion method used
in R-SSD. The work in (Lin et al., 2017) also men-
tions unified prediction, but it does not include any
details and experiments on it. A brief summary of dif-
ferent object detection schemes is shown in Figure 4.
4 EXPERIMENT
We experimented the proposed method on PASCAL
VOC 2007 (Everingham et al., 2010), PASCAL VOC
2012 and MS COCO datasets (Lin et al., 2014). Our
implementation is based on the publicly available
SSD (Liu et al., 2016)
3
. All the experimental results
of SSD are the latest scores with data augmentation
mentioned in (Fu et al., 2017). For all the experi-
ments, the reduced VGG-16 model (Simonyan and
Zisserman, 2014) pre-trained on the ILSVRC CLS-
LOC dataset (Russakovsky et al., 2014) is used as the
backbone network. For fair comparison, most of the
settings are set to be the same as those of SSD except
3
https://github.com/weiliu89/caffe/tree/ssd
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
356
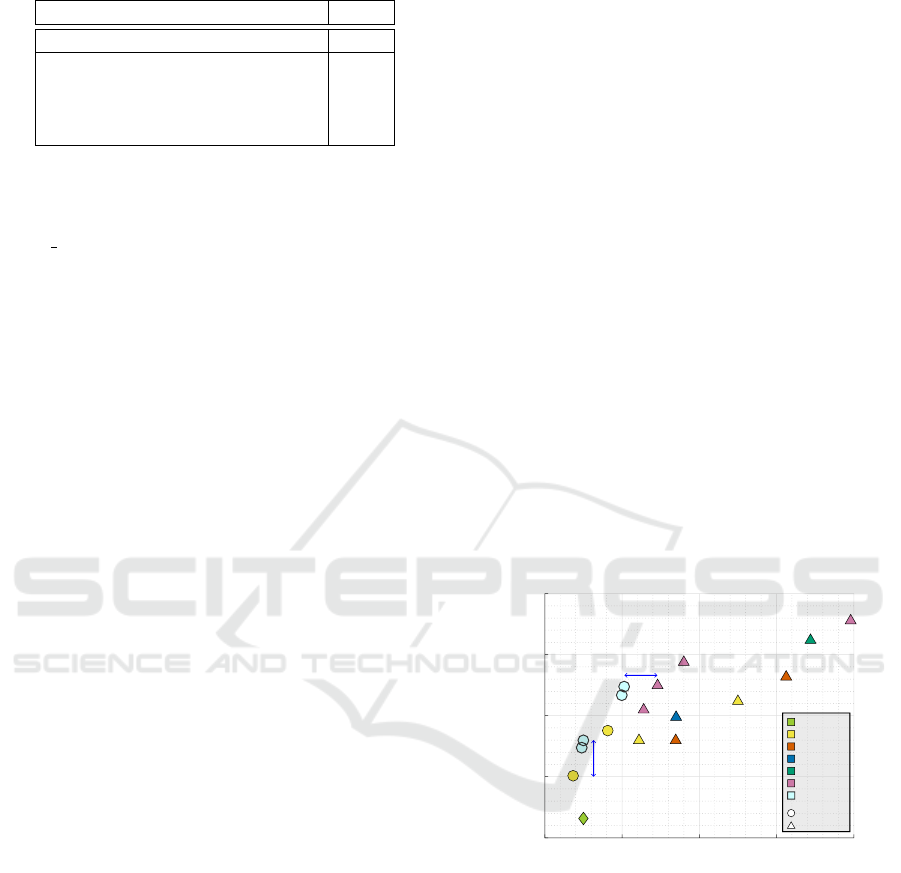
Table 1: PASCAL 2007 test detection results.
Method mAP
SSD 300 77.5
SSD 300 + 2WAY 78.3
SSD 300 + 2WAY + Unified Pred 78.6
SSD 300 + 3WAY 78.8
SSD 300 + 3WAY + Unified Pred 79.2
the number of proposals. It is different from SSD, be-
cause we used 6 default boxes in all the prediction
layers for unified prediction while SSD used 4 for the
conv4 3 and the top layer, and 6 for the rest.
4.1 PASCAL VOC2007
We trained our model on VOC2007 trainval and
VOC2012 trainval. We set the batch size as 32. For
the training of the 2-way model, we used a learning
rate of 10
−3
initially, then it is decreased by a fac-
tor of 10 at 80k and 100k iterations, respectively. The
training was terminated at 120k iterations. For the 3-
way model, we froze all the weights of the pre-trained
2-way model except the prediction module, then fine-
tuned the network using the learning rate of 10
−3
for
40k iterations, 10
−4
for the next 20k iterations, and
10
−5
for the final 10k iterations. The end-to-end train-
ing was also applied on the 3-way model, but the re-
sults were worse than the above training strategy.
Table 1 shows our result on PASCAL VOC 2007
test set. Here, Unified Pred indicates the applica-
tion of the unified prediction module and the predic-
tion modules for the ones without this indication were
trained separately as in the original SSD. As men-
tioned above, each 3-way model was fine-tuned on
the corresponding 2-way model. In this experiment,
we observed that the proposed model with only 2-way
Resblock without the deconvolution path achieved
1.1% higher mAP than that of SSD. The 3-way model
which further utilizes deconvolution layers was up
to 0.6% higher than the 2-way model. The unified
prediction module made better advance in the 3-way
model than the 2-way model, which scored 79.2% and
78.4% respectively.
4.2 MS COCO
For fair comparison with SSD (Liu et al., 2016), most
of the hyper-parameters required for training were set
to the same as SSD. For training 2-way models, we
used a learning rate of 10
−3
for the first 240k itera-
tions, 10
−4
for the next 120k iterations and 10
−5
for
the last 40k. For training 3-way models, we used a
learning rate of 10
−3
for the first 120k iterations, 10
−4
for the next 60k iterations and 10
−5
for the last 20k,
which are exactly half of those for the 2-way models.
Other parameters such as scales and aspect ratios of
the prior box were identical to those of SSD.
Table 2 shows the performance of various methods
on MS COCO test-dev. Despite the proposed meth-
ods use a relatively shallow network, VGG-16 (Si-
monyan and Zisserman, 2014), they achieved enough
performance to compare with other methods which
use a very deep network. The fourth column indicates
that RUN3WAY300 achieved 2.9% better mAP com-
pared to SSD300 (Liu et al., 2016). It was the same
performance with SSD321 and DSSD321 (Fu et al.,
2017), which adopted ResNet-101 (He et al., 2016)
as their back-bone network. Also, RUN3WAY512
achieved 3.6% better mAP than SSD512. In particu-
lar, RUN3WAY512 achieved the highest average pre-
cision and recall for small objects among compared
methods except RetinaNet. It means that the proposed
Resblock is a quite effective module to enhance low-
level feature maps.
5 DISCUSSION
5.1 Speed vs. Accuracy
050 100 150 200
20
30
35
40
25
SSD
YOLO v2
DSSD
R-FCN
FPN FRCN
RetinaNet
Proposed
VGG based
ResNet based
21ms faster
2.9%mAP
better
inference time(ms)
COCO AP
Figure 5: Speed vs. Accuracy of recent methods using
public numbers on COCO. Our results (sky blue circles)
are measured on Titan X. (Best viewed in color).
The single stage detectors, which are represented
by YOLO (Redmon et al., 2016) and SSD (Liu et al.,
2016), proposed end-to-end neural networks that re-
moved the RoI Pooling of two-stage detectors. They
have achieved a lot of speed improvements, but they
could not avoid the loss of accuracy. Conversely, re-
cent single stage detectors have been studied to im-
prove performance, while suffering the loss of speed.
Unlike other approaches, the proposed RUN is de-
signed to maximize performance at high speeds on
the VGG-16 (Simonyan and Zisserman, 2014) back-
Two-layer Residual Feature Fusion for Object Detection
357
Table 2: MS COCO test-dev detection results.
Method data network
Avg. Precision, IoU: Avg. Precision, Area: Avg. Recall, #Dets: Avg. Recall, Area:
0.5:0.95 0.5 0.75 S M L 1 10 100 S M L
Faster (Ren et al., 2015) trainval VGG
21.9 42.7 - - - - - - - - - -
ION (Bell et al., 2016) train VGG
23.6 43.2 23.6 6.4 24.1 38.3 23.2 32.7 33.5 10.1 37.7 53.6
R-FCN (Li et al., 2016) trainval ResNet-101
29.9 51.9 - 10.8 32.8 45.0 - - - - - -
RetinaNet (Lin et al., 2017) trainval ResNet-101
39.1 59.1 42.3 21.8 42.7 50.2 - - - - - -
SSD300 (Liu et al., 2016) trainval35k VGG
25.1 43.1 25.8 6.6 25.9 41.4 23.7 35.1 37.2 11.2 40.4 58.4
SSD321 (Fu et al., 2017) trainval35k ResNet-101
28.0 45.4 29.3 6.2 28.3 49.3 25.9 37.8 39.9 11.5 43.3 64.9
DSSD321 (Fu et al., 2017) trainval35k ResNet-101
28.0 46.1 29.2 7.4 28.1 47.6 25.5 37.1 39.4 12.7 42.0 62.6
RUN2WAY300 trainval35k VGG
27.4 46.1 28.4 8.9 27.9 43.8 25.0 37.3 39.5 14.6 42.6 59.8
RUN3WAY300 trainval35k VGG
28.0 47.5 28.9 9.9 28.6 43.9 25.3 38.0 40.5 16.2 43.8 60.2
SSD512 (Liu et al., 2016) trainval35k VGG
28.8 48.5 30.3 10.9 31.8 43.5 26.1 39.5 42.0 16.5 46.6 60.8
SSD513 (Fu et al., 2017) trainval35k ResNet-101
31.2 50.4 33.3 10.2 34.5 49.8 28.3 42.1 44.4 17.6 49.2 65.8
DSSD513 (Fu et al., 2017) trainval35k ResNet-101
33.2 53.3 35.2 13.0 35.4 51.1 28.9 43.5 46.2 21.8 49.1 66.4
RUN2WAY512 trainval35k VGG
31.7 52.1 33.6 13.2 33.9 46.5 27.7 42.2 44.7 22.0 47.9 62.7
RUN3WAY512 trainval35k VGG
32.4 53.5 34.2 14.7 34.0 46.7 28.0 43.0 45.8 24.4 48.1 63.4
Table 3: Speed & Accuracy on PASCAL VOC2007
test. * is measured by ourselves.
Method network mAP FPS GPU
Faster R-CNN (Ren et al., 2015) VGG16 73.2 7 Titan X
Faster R-CNN (He et al., 2016) ResNet-101 76.4 2.4 K40
R-FCN (Li et al., 2016) ResNet-101 80.5 9 Titan X
SSD300 (Liu et al., 2016) VGG16 77.5 54.5* Titan X
SSD321 (Fu et al., 2017) ResNet-101 77.1 16.4 Titan X
DSSD321 (Fu et al., 2017) ResNet-101 78.6 11.8 Titan X
R-SSD300 (Jeong et al., 2017) VGG16 78.5 37.1* Titan X
StairNet (Woo et al., 2017) VGG16 78.8 30 Titan X Pascal
RUN2WAY300 VGG16 78.6
41.8 Titan X
58.4 Titan X Pascal
RUN3WAY300 VGG16 79.2
40.0 Titan X
56.3 Titan X Pascal
SSD512 (Liu et al., 2016) VGG16 79.5 24.5* Titan X
SSD513 (Fu et al., 2017) ResNet-101 80.6 8.0 Titan X
DSSD513 (Fu et al., 2017) ResNet-101 81.5 6.4 Titan X
R-SSD512 (Jeong et al., 2017) VGG16 80.8 15.8* Titan X
RUN2WAY512 VGG16 80.6
20.1 Titan X
31.8 Titan X Pascal
RUN3WAY512 VGG16 80.9
19.5 Titan X
29.8 Titan X Pascal
bone, which has significantly fewer layers and param-
eters than ResNet (He et al., 2016). The experimented
results demonstrate the performance improvement of
RUN.
Table 3 shows that our method outperforms other
competitors with less loss of speed. Our experiments
were tested using Titan X GPU, cuDNN v5.1 and In-
tel I7-6700@3.4GHz. For exact comparison, we mea-
sured FPS of some methods on the same environment
and marked * in the table.
In Figure 5, we show the trade-off relation be-
tween the detection accuracy and inference time
by plotting the results of RUN and other meth-
ods on COCO test-dev. The RUN3WAY300 model
(25.0ms, 28.0% mAP) is 36% slower but 2.9% bet-
ter in mAP than the SSD300 (Liu et al., 2016) model
(18.3ms, 25.1% mAP). It is about 60% faster than
ResNet-101 based SSD321 (Fu et al., 2017) model
(61ms, 28.0% mAP) that has a similar performance.
Likewise, the RUN3WAY512 (51.4ms, 32.4% mAP)
is 26% slower but 3.6% better in mAP than the
SSD512 model (40.8ms, 28.8% mAP). It is about
44% faster than RetinaNet-50-500 (Lin et al., 2017)
(73ms, 32.5% mAP) that has a similar performance.
In addition, we measured FPS of our methods on
Titan X Pascal with the other environment kept the
same. Table 3 shows that even the most complex ver-
sion of our method, RUN3WAY512, can works in real
time (29.8 FPS) on Tital X Pascal.
6 CONCLUSION
The proposed RUN architecture for object detection
was originated from the awareness of the contradic-
tory requirements for multi-scale features that they
should contain low-level information on an image
as well as high-level information on objectness. The
proposed two-layer feature fusion method using the
3-way Resblock alleviated the gradient exploitation
problem and enriched contextual information, an im-
portant element for a good prediction performance.
We also showed that the generalization performance
of multi-scale prediction in our architecture can be
improved by adopting the unified prediction mod-
ule which integrates the separate prediction modules
into a common prediction module. This approach,
which can be seen to be somewhat simple, resulted
in outstanding performance on the PASCAL VOC
test. The results on COCO dataset also show how fast
and efficient our algorithms are. We expect the pro-
posed method be not restricted to SSD-based methods
but also applicable to other structures utilizing multi-
scale features.
ACKNOWLEDGEMENTS
The research was supported by the Green Car devel-
opment project through the Korean MTIE (10063267)
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
358

and ICT R&D program of MSIP/IITP (2017-0-
00306).
REFERENCES
Bell, S., Zitnick, C. L., Bala, K., and Girshick, R. (2016).
Inside-outside net: Detecting objects in context with
skip pooling and recurrent neural networks. In Com-
puter Vision and Pattern Recognition (CVPR), 2016
IEEE Conference on, pages 2874–2883. IEEE.
Cai, Z., Fan, Q., Feris, R., and Vasconcelos, N. (2016). A
unified multi-scale deep convolutional neural network
for fast object detection. In ECCV.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Computer Vision and
Pattern Recognition, 2005. CVPR 2005. IEEE Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Doll
´
ar, P., Appel, R., Belongie, S., and Perona, P. (2014).
Fast feature pyramids for object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 36(8):1532–1545.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
Fu, C.-Y., Liu, W., Ranga, A., Tyagi, A., and Berg, A. C.
(2017). Dssd: Deconvolutional single shot detector.
arXiv preprint arXiv:1701.06659.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
International Conference on Computer Vision, pages
1440–1448.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
He, K., Zhang, X., Ren, S., and Sun, J. (2014). Spatial pyra-
mid pooling in deep convolutional networks for visual
recognition. In European Conference on Computer
Vision, pages 346–361. Springer.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition, pages 770–778.
Jeong, J., Park, H., and Kwak, N. (2017). Enhancement of
ssd by concatenating feature maps for object detec-
tion. arXiv preprint arXiv:1705.09587.
Kong, T., Yao, A., Chen, Y., and Sun, F. (2016). Hyper-
net: Towards accurate region proposal generation and
joint object detection. In Computer Vision and Pat-
tern Recognition (CVPR), 2016 IEEE Conference on,
pages 845–853. IEEE.
Li, Y., He, K., Sun, J., et al. (2016). R-fcn: Object detec-
tion via region-based fully convolutional networks. In
Advances in Neural Information Processing Systems,
pages 379–387.
Lin, T.-Y., Doll
´
ar, P., Girshick, R., He, K., Hariha-
ran, B., and Belongie, S. (2016). Feature pyra-
mid networks for object detection. arXiv preprint
arXiv:1612.03144.
Lin, T.-Y., Goyal, P., Girshick, R., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. arXiv
preprint arXiv:1708.02002.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft coco: Common objects in context. In Euro-
pean Conference on Computer Vision, pages 740–755.
Springer.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C.-Y., and Berg, A. C. (2016). Ssd: Single shot multi-
box detector. In European Conference on Computer
Vision, pages 21–37. Springer.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, pages 779–
788.
Redmon, J. and Farhadi, A. (2016). Yolo9000: Better, faster,
stronger. arXiv preprint arXiv:1612.08242.
Ren, J., Chen, X., Liu, J., Sun, W., Pang, J., Yan, Q., Tai, Y.-
W., and Xu, L. (2017). Accurate single stage detector
using recurrent rolling convolution. In CVPR.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., et al. (2014). Imagenet large
scale visual recognition challenge. arXiv preprint
arXiv:1409.0575.
Sermanet, P., Eigen, D., Zhang, X., Mathieu, M., Fergus,
R., and LeCun, Y. (2013). Overfeat: Integrated recog-
nition, localization and detection using convolutional
networks. arXiv preprint arXiv:1312.6229.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. International journal of computer vision,
57(2):137–154.
Woo, S., Hwang, S., and Kweon, I. S. (2017). Stairnet: Top-
down semantic aggregation for accurate one shot de-
tection. arXiv preprint arXiv:1709.05788.
Two-layer Residual Feature Fusion for Object Detection
359
