
BOOK: Storing Algorithm-Invariant Episodes for Deep Reinforcement
Learning
Simyung Chang
1,2
, YoungJoon Yoo
3
, Jaeseok Choi
1
and Nojun Kwak
1
1
Seoul National University, Seoul, Korea
2
Samsung Electronics, Suwon, Korea
3
Clova AI Research, NAVER Corp, Seongnam, Korea
Keywords:
BOOK, Book Learning, Reinforcement Learning.
Abstract:
We introduce a novel method to train agents of reinforcement learning (RL) by sharing knowledge in a way
similar to the concept of using a book. The recorded information in the form of a book is the main means by
which humans learn knowledge. Nevertheless, the conventional deep RL methods have mainly focused either
on experiential learning where the agent learns through interactions with the environment from the start or
on imitation learning that tries to mimic the teacher. Contrary to these, our proposed book learning shares
key information among different agents in a book-like manner by delving into the following two characteristic
features: (1) By defining the linguistic function, input states can be clustered semantically into a relatively
small number of core clusters, which are forwarded to other RL agents in a prescribed manner. (2) By defining
state priorities and the contents for recording, core experiences can be selected and stored in a small container.
We call this container as ‘BOOK’. Our method learns hundreds to thousand times faster than the conven-
tional methods by learning only a handful of core cluster information, which shows that deep RL agents can
effectively learn through the shared knowledge from other agents.
1 INTRODUCTION
Recently, reinforcement learning (RL) using deep
neural networks (Mnih et al., 2013; Van Hasselt et al.,
2016; Mnih et al., 2016) has achieved massive suc-
cess in control systems consisting of complex input
states and actions, and applied to various research
fields (Silver et al., 2016; Abbeel et al., 2007). The
RL problem is not easy to directly solve via cost min-
imization problem because of the constraint that it is
difficult to immediately obtain the output according
to the input. Therefore, various methods such as Q-
learning (Bellman, 1957) and policy gradient (Sutton
et al., 1999) have been proposed to solve the RL prob-
lems.
The recent neural-network (NN)-based RL meth-
ods (Mnih et al., 2013; Van Hasselt et al., 2016; Mnih
et al., 2016) approximate the dynamic-programming-
based (DP-based) optimal reinforcement learning
(Jaakkola et al., 1994) through the neural network.
However, this process has the problem that the Q-
values for independent state-action pairs are corre-
lated, which violates the independence assumption.
Thus, this process is no longer optimal (Werbos,
Figure 1: Example illustration of the semantically important
state. In the left image, the person (agent) standing on the
yellow circle (state) can choose either ways, and the results
for two actions would be the same. Conversely, in the right
image, the result will be largely different (bomb or money)
according to the action (direction) the agent choose on the
turning point (yellow). In our work, the state in the right
image is considered to be more important than the state in
the left image and this state is stored for further usage in the
learning of other agents.
1992). This results in differences in performance and
convergence time depending on the experiences used
to train the network. Hence, the effective selection of
the experiences becomes crucial for successful train-
ing of the deep RL framework.
To gather the experiences, most deep-learning-
based RL algorithms have utilized experience mem-
Chang, S., Yoo, Y., Choi, J. and Kwak, N.
BOOK: Storing Algorithm-Invariant Episodes for Deep Reinforcement Learning.
DOI: 10.5220/0007308000730082
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 73-82
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
73

ory in the learning process (Lin, 1992; Mnih et al.,
2013; Van Hasselt et al., 2016; Mnih et al., 2016;
Schulman et al., 2015; Riedmiller, 2005), which
stores batches of state-action pairs (experiences) that
frequently appear in the network for repetitive use in
the future learning process. Also, in (Schaul et al.,
2015), a method of prioritized experience memory
that finds priorities of each experience is proposed,
based on which a batch is created. Eventually, the
key to creating such a memory is to compute the pri-
orities of the credible experiences so that learning can
focus on the reliable experiences.
However, in the existing methods, just a few
episodes have meaningful information, and the us-
ability of the gathered episodes are highly algorithm-
specific. It can be largely inefficient compared to hu-
mans who can select semantically meaningful (credi-
ble) events for learning the proper behaviors, regard-
less of the training method. Figure 1 shows the ex-
amples of the case. In the situation shown in the left
image, choosing an action does not bring much dif-
ference to the agent. However, in the case of the right
image, the result (bomb or money) of choosing an ac-
tion (left or right) can be significantly different for
the agent, and it is natural to think that the later case
is much important for deciding the movement of the
agent.
Inspired by the observation, in this paper, we
propose a method of extracting and storing impor-
tant episodes that are invariant to diverse RL algo-
rithms. First, we propose an importance and a priority
measures that can capture the semantically important
episodes during entire experiences. More specifically,
in this paper, the importance of a state is measured
by the difference of the rewards resultant from differ-
ent actions and the priority of a state is defined as the
product of importance and the frequency of the state
in episodes.
Then, we gather experiences during an arbitrary
deep RL learning procedure, and store them into
dictionary-type memory called ‘BOOK’ (Brief Orga-
nization of Obtained Knowledge). The process of
generating a BOOK during the learning of a writer
agent will be termed as ’Writing the BOOK’ in the
followings. The stored episodes are quantized with
respect to the state, and the quantized states are used
as a key in the book memory. All the experiences in
the BOOK are dynamically updated by upcoming ex-
periences having the same key. To efficiently manage
the episode in the BOOK, some linguistics inspired
terms such as linguistic function and state are pro-
posed.
We have shown that the ’BOOK’ memory is par-
ticularly effective for two aspects. First, we can
use the memory as a good initialization data for di-
verse RL training algorithms, which enables fast con-
vergence. Second, we can achieve compatible, and
sometimes higher performances by only using the ex-
periences in the memory when training a RL network,
compared to the case that entire experiences are used.
The experiences stored in the memory is usually a
few hundred times smaller compared to the experi-
ences required in usual random-batch-based RL train-
ing (Mnih et al., 2013; Van Hasselt et al., 2016), and
hence give us much effectiveness in time and memory
space required for the training.
The contributions of the proposed method are as
follows:
(1) The dictionary termed as BOOK that stores
the credible experience, which is useful for diverse
RL network training algorithms, expressed by the tu-
ple (cluster of states, action, and the corresponding
Q-value) is proposed.
(2) The method for measuring the credibility: im-
portance and priority terms of each experience valid
for arbitrary RL training algorithms, is proposed.
(3) The training method for RL that utilizes the
BOOK is proposed, which is inspired by DP and is
applicable to diverse RL algorithms.
To show the efficiency of the proposed method,
it is applied to the major deep RL methods such
DQN (Mnih et al., 2013) and A3C (Mnih et al., 2016).
The qualitative as well as the quantitative perfor-
mances of the proposed method are validated through
the experiments on public environments published by
OpenAI (Brockman et al., 2016).
2 BACKGROUND
The goal of RL is to estimate the sequential actions
of an agent that maximize cumulative rewards given a
particular environment. In RL, Markov decision pro-
cess (MDP) is used to model the motion of an agent
in the environment. It is defined by the state s
t
∈ R
S
,
action a
t
∈ {a
1
,... ,a
A
} which occurs in the state s
t
,
and the corresponding reward r
t
∈ R, at a time step
t ∈ Z
+
.
1
We term the function that maps the ac-
tion a
t
for a given s
t
as the policy, and the future state
s
t+1
is defined by the pair of the current state and the
action, (s
t
,a
t
). Then, the overall cost for the entire se-
quence from the MDP is defined as the accumulated
discounted reward, R
t
=
∑
∞
k=0
γ
k
r
t+k
, with a discount
factor γ ≤ 1.
Therefore, we can solve the RL problem by find-
ing the optimal policy that maximizes the cost R
t
.
1
R and Z
+
denote the real and natural numbers respec-
tively.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
74
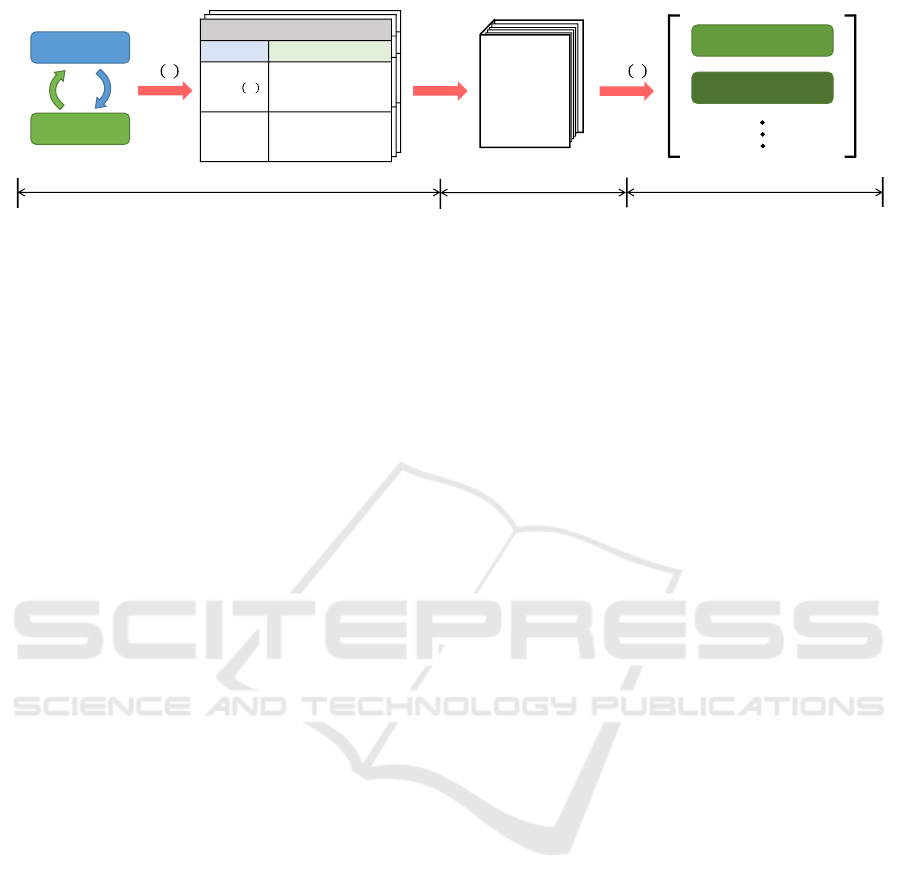
BOOK
Linguistic Rule ℒ(∙)
Key Value
𝑐
1
= 𝐿 𝑠
𝑖
𝑄(𝑐
1
, 𝑎
1
), 𝐹(𝑐
1
, 𝑎
1
),
𝑄(𝑐
1
, 𝑎
2
), 𝐹(𝑐
1
, 𝑎
2
),
⁝
𝑐
2
= 𝐿(𝑠
𝑘
)
𝑄(𝑐
2
, 𝑎
1
), 𝐹(𝑐
2
, 𝑎
1
),
𝑄(𝑐
2
, 𝑎
2
), 𝐹(𝑐
2
, 𝑎
2
),
⁝
Environment
Writer Agent
𝐿 𝑠
Reader Agent (DQN)
Reader Agent (A3C)
𝐿
−1
𝑐
Write
Publish Train
select
top N
experiences
Figure 2: Overall framework of the proposed model. Similar experiences (state-action pairs) from multiple episodes are
grouped into a cluster and the credible experiences corresponding to large clusters are written in a BOOK with their Q-values
and frequencies Fs. The BOOK is published with Top N experiences after learning. Then, reader agents use this information
in training.
However, it is difficult to apply the conventional op-
timization methods in finding the optimal policy. It
is because we should wait until the agent reaches the
terminal state to see the cost R
t
resulting from the ac-
tion of the agent at time t. To solve the problem in a
recursive manner, we define the function Q(s
t
,a
t
) =
E[R
t
|s = s
t
,a = a
t
,π] denoting the expected accumu-
lated reward for (s
t
,a
t
) with a policy π. Then, we
can induce the recurrent Bellman equation (Bellman,
1957):
Q(s
t
,a
t
) = r
t
+ γmax
a
t+1
Q(s
t+1
,a
t+1
). (1)
It is proven that the Q-value, Q(s
t
,a
t
), for all time step
t satisfying (1) can be calculated by applying dynamic
programming (DP), and the resultant Q-values are op-
timal (Jaakkola et al., 1994). However, it is practically
impossible to apply the DP method when the num-
ber of state is large, or the state is continuous. Re-
cently, the methods such as Deep Q-learning (DQN),
Double Deep-Q-learning (DDQN) solve the RL prob-
lem with complex state s
t
by using approximate DP
that trains Q-network. The Q-network is designed so
that it calculates the Q-value for each action when a
state is given. Then, the Q-network is trained by the
temporal difference (TD) (Watkins and Dayan, 1992)
method which reduces the gap between Q-values ac-
quired from the Q-network and those from (1).
3 RELATED WORK
Recently, deep learning methods (Mnih et al., 2013;
Hasselt, 2010; Van Hasselt et al., 2016; Wang et al.,
2015; Mnih et al., 2016; Schaul et al., 2015; Sali-
mans et al., 2017) have improved performance by in-
corporating neural networks to the classical RL meth-
ods such as Q-learning (Watkins and Dayan, 1992),
SARSA (Rummery and Niranjan, 1994), evolution
learning (Salimans et al., 2017), and policy searching
methods (Williams, 1987; Peters et al., 2003) which
use TD (Sutton, 1988).
(Mnih et al., 2013), (Hasselt, 2010) and (Van Has-
selt et al., 2016) replaced the value function of
Q-learning with a neural network by using a TD
method. (Wang et al., 2015) proposed an algo-
rithm that shows faster convergence than the method
based on Q-learning by applying dueling network
method (Harmon et al., 1995). Furthermore, (Mnih
et al., 2016) applied the asynchronous method to Q-
learning, SARSA, and Advantage Actor-Critic mod-
els.
The convergence and performance of deep-
learning-based methods are greatly affected by in-
put data which are used to train an approximated
solution (Bertsekas and Tsitsiklis, 1995) of classi-
cal RL methods. (Mnih et al., 2013) and (Van Has-
selt et al., 2016) solved the problem by saving ex-
perience as batch in the form of experience replay
memory (Lin, 1993). In addition, Prioritized Expe-
rience Replay (Schaul et al., 2015) achieved higher
performance by applying replay memory to recent
Q-learning based algorithms by calculating priority
based on the importance of experience. (Pritzel et al.,
2017) proposed a Neural episodic control (NEC) to
apply tabular based Q-learning method for training
the Q-network by first, semantically clustering the
states and then, updates the value entities of the clus-
ters.
Also, imitation learning (Ross and Bagnell, 2014;
Krishnamurthy et al., 2015; Chang et al., 2015) which
solves problems through expert’s experience is one of
the main research flows. This method trains a new
agent in a supervised manner using state-action pairs
obtained from the expert agent and shows faster con-
vergence speed and better performance using experi-
ences of the expert. However, it is costly to gather
experiences from experts.
The goal of our work is different to the mentioned
approaches as follows. (1) compared to imitation
learning, the proposed method differs in the aspect
BOOK: Storing Algorithm-Invariant Episodes for Deep Reinforcement Learning
75

that credible data are extracted from the past data in
an unsupervised manner, and more importantly, (2)
compared to the prioritized experience replay (Schaul
et al., 2015), our work proposes a method to generate
a memory that stores core experiences useful for train-
ing diverse RL algorithms. (3) Also, compared to the
NEC (Pritzel et al., 2017), our work aims to use the
BOOK memory for good initialization and fast con-
vergence, when training the RL network regardless of
the algorithm used. but, the dictionary of NEC can
not provide all the information necessary for learn-
ing, such as states, so it is difficult to use it to train
other RL networks.
4 PROPOSED METHOD
In this paper, our algorithm aims to find the core ex-
perience through many experiences and write it into
a BOOK, which can be used to share knowledge with
other agents that possibly use different RL algorithms.
Figure 2 describes the main flow of the proposed al-
gorithm. First, from the RL network, the terminated
episodes of a writer agent are extracted. Then, among
experiences from the episodes, the core and credible
experiences are gathered and stored into the BOOK
memory. In this process, using the semantic cluster of
states as a key, the BOOK stores the value information
of the experiences related to the semantic cluster. This
‘writing’ process is iterated until the end of training.
Then, the final BOOK is ‘published’ with the top N
core experiences of this memory, that can be directly
exploited in the ‘training’ of other reader RL agents.
In the following subsections, how to design the
BOOK and how to use BOOK in the training of RL
algorithms are described in more detail.
4.1 Desigining the BOOK Structrue
Given a state s ∈ R
S
and action a ∈ {a
1
,..., a
A
},
we define the memory B termed as ‘BOOK’ which
stores the credible experience in the form appropriate
for lookup-table inspired RL. Assuming there exists
semantic correlation among states, the input state
s
i
,i = 1 . .. N
s
can be clustered into the core K
clusters C
k
∈ C ,k = 1,. .. ,K. To reduce the semantic
redundancy, the BOOK stores the information related
to the cluster C
k
, and the corresponding information
is updated by the information of the states s
i
included
in the cluster. It means that the memory space of the
BOOK in the ‘writing’ process is O(AK). To map
the state s
i
to the cluster C
k
, we define the mapping
function L : s → c
k
, where c
k
∈ R
S
denotes the repre-
sentative value of the cluster C
k
. We term the mapping
Algorithm 1: Writing a BOOK.
Define linguistic function L for states and reward
and initialize it.
Initialize BOOK B with capacity K.
for episode = 1,...,M do
Initialize Episode memory E
Get initial state s
for t = t
start
,. .. ,t
terminal
do
Take action a
t
with policy π
Receive new state s
t+1
and reward r
t
Store transition (s
t
,a
t
,r
t
,s
t+1
) in E
Perform general reinforcement algorithm
end for
for t = t
terminal
,. .. ,t
start
do
Take transition (s
t
,a
t
,r
t
,s
t+1
) from E
c
k
= L(s
t
)
Update Q(c
k
,a
t
), F(c
k
,a
t
) to B with equation
(2), (3), (4), (5)
end for
if episode%T
decayPeriod
== 0 then
Decay F(c
k
,a
j
) in B for all k ∈ {1,. .. ,K} and
j ∈ {1, .. ., A}
end if
end for
function L(·), the representative c
k
, and the reward of
c
k
as linguistic function, linguistic state, and linguistic
reward, respectively
2
. To cluster the states and define
the linguistic function, arbitrary clustering methods or
quantization can be applied. For simplicity, we adopt
the quantization in this paper.
Consequently, the element of a BOOK b
k, j
∈ B
is defined as b
k, j
∈ {c
k
,Q(c
k
,a
j
),F(c
k
,a
j
)}, where
Q(c
k
,a
j
) and F(c
k
,a
j
) denote the Q-value of (c
k
,a
j
)
and the hit frequency of the b
k, j
. Then, the in-
formation regarding the input state s
i
is stored into
b
k
= [b
k,1
,. .. ,b
k,A
], where c
k
= L(s
i
). The Q-value
Q(c
k
,a
j
) is iteratively updated by Q
t
(s
t
= s
i
,a
t
= a
j
)
which denotes the Q-value from the credible experi-
ence {s
t
,a
t
,r
t
,s
t+1
}.
4.2 Iterative Update of the BOOK using
Credible Experiences
To fill the BOOK memory by credible experiences,
we first extract the credible experiences from the en-
tire possible experiences. We extract the credible ex-
periences based on the observation that the terminated
episode
3
holds valid information to judge whether an
2
The term ‘linguistic’ is used to represent both charac-
teristics of ‘abstraction’ and ‘shared rule’.
3
An episode denotes a sequence of state-action-reward
until termination.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
76

agent’s action was good or bad. At least in the termi-
nal state, we can evaluate whether the state-action pair
performed good or bad by just observing the result of
the final action; for example, success or failure. Once
we get credible experience from terminal sequences,
then we can get the related credible experiences us-
ing the upcoming equation (2). More specifically, the
BOOK is updated using the experience E
t
from the
terminated episode E = {E
1
,..., E
T
} in backward or-
der, i.e., from E
T
to E
1
, where E
t
= {s
t
,a
t
,r
t
,s
t+1
}.
Consider that for an experience E
t
at time t, the cur-
rent state, current action, and the future state are
s
t
= s
i
,a
t
= a
j
and s
t+1
= s
i
0
, respectively. Also, as-
sume that s
i
∈ C
k
. Then, the Q-value Q(c
k
,a
j
) stored
in the content b
k, j
is updated by
Q(c
k
,a
j
) = βQ(c
k
,a
j
) + (1 − β)Q
t
(s
i
,a
j
), (2)
where
Q
t
(s
i
,a
j
) = r
t
+ γmax
a
0
Q(s
i
0
,a
0
). (3)
β = F(c
k
,a
j
)/{F(c
k
,a
j
) + F(L(s
i
0
),argmax
a
0
Q(s
i
0
,a
0
))}
(4)
Here, F(c
k
,a
j
) refers to the hit frequency of the
content b
k, j
. The term Q
t
(s
i
,a
j
) denotes the estimated
Q-value of (s
i
,a
j
) acquired from the RL network.
In (4), F(L(s
i
0
),argmax
a
0
Q(s
i
0
,a
0
)) is initialized to 1
when the term regarding L(s
i
0
) is not yet stored in
the BOOK. We note that we calculate Q
t
(s
t
,a
t
) from
Q
t
(s
t+1
,a
t+1
) in backward manner, because only the
terminal experience E
T
is fully credible among the
episode E acquired from the RL network. The update
rule for the frequency term F(c
k
,a
j
) in the content
b
k, j
is defined as
F(c
k
,a
j
) = min(F(c
k
,a
j
) + F(L(s
i
0
),argmax
a
0
Q(s
i
0
,a
0
),F
l
),
(5)
where F
l
is the predefined limit of the frequency
F(·, ·). The frequency F(·,·) is reduced by 1 for every
predefined number of episodes to avoid F(·, ·) from
being continually increasing. To extract the episode
E , we can use arbitrary deep RL algorithm based on
Q-network. Algorithm 1 summarizes the procedure
of writing a BOOK.
4.3 Priority based Contents Recoding
In many cases, the number of clusters becomes large,
and it is clearly inefficient to store all the contents
without considering the priority of a cluster. Hence,
we maintain the efficiency of BOOK by continu-
ously removing contents with lower priority from the
BOOK. In our method, the priority p
k, j
is defined by
the product of the frequency term F(c
k
,a
j
) and the
importance term I(c
k
),
p
k, j
= I(c
k
)F(c
k
,a
j
). (6)
The importance term I(c
k
) reflects the maximum gap
of reward for choosing an action for a given linguistic
state c
k
, as the following:
I(c
k
) = max
a
Q(c
k
,a) − min
a
Q(c
k
,a). (7)
In Fig. 1, we can see the concept of the importance
term. At the first crossroad (state) in the left, the
penalty of choosing different branches (actions) is not
severe. However, at the second crossroad, it is very
important to choose a proper action given the state.
Obviously, the situation in the right image is much
crucial, and the RL should train the situation more
carefully. Now, we can keep the size of the BOOK as
we want by eliminating the contents with lower prior-
ity p
k, j
(left image in the figure).
4.4 Publishing a BOOK
We have seen how to write a BOOK in the previous
subsections. In the ‘writing’ stage in Fig. 2, it lim-
its the contents to be kept according to priority, but
maintains a considerable capacity K to compare in-
formation of various states. However, our method fi-
nally publish the BOOK with only the top N(< K)
priority states with the same rule as the subsection
4.3 after learning of the writer agent. We have shown
through experiments that we can obtain good perfor-
mance even if a relatively small-sized BOOK is used
for training. See section 4.5 for more detailed analy-
sis.
4.5 Training Reader Network using the
BOOK
As shown in Figure 2, we train the RL network using
the BOOK structure that stores the experience from
the episode. The BOOK records the information of
the representative states that is useful for RL train-
ing. The information required to learn the general re-
inforcement learning algorithm can be obtained in the
form of (s,a,Q(s,a)) or (s,a,V (s), A(s,a)) through
our recorded data. Here, V (s) and A(s, a) are the value
of the state s and the advantage of the state-action pair
(s,a).
To utilize the BOOK in the learning of the envi-
ronment, the linguistic state c
k
has to be converted to
the real state s. The state s can be decoded by im-
plementing the inverse function s = L
−1
(c
k
), or one
of the state s ∈ C
k
can be stored in the BOOK as a
sample when the BOOK is made.
In the first case of using Q-value Q(s,a) in the
training, the recorded information can be used as it is.
BOOK: Storing Algorithm-Invariant Episodes for Deep Reinforcement Learning
77

In the second case, V (s) is calculated as the weighted
sum of the Q(s,a) and the difference between the Q-
value and the state value V is used as the advantage
A(s,a) as follows:
V (s) ≈
∑
a
i
F(c
k
,a
i
)Q(c
k
,a
i
)
∑
a
i
F(c
k
,a
i
)
, (8)
A(s,a) ≈ Q(c
k
,a) −V (s). (9)
A BOOK stores only the measured (experienced)
data regardless of the RL model without bootstrap-
ping. The learning method of each model is used as it
is, in the training using the BOOK. Since DQN (Mnih
et al., 2013) requires state, action and Q-value in
learning, it learns by decoding this information in the
BOOK. On the other hand, A3C (Mnih et al., 2016)
and Dueling DQN (Wang et al., 2015) require state,
action, state-value V and advantage A, so these de-
code the corresponding information in the BOOK as
shown in equations (8) and (9). Because a BOOK has
all the information needed to train an RL agent, the
agent is not required to interact with the environment
while learning the BOOK.
We note that our learning process shares the es-
sential philosophy with the classical DP in that the
learning process explores the state-action space based
on credible Q(s,a) stored in the BOOK without boot-
strapping and dynamically updates the values in the
solution space using the stored information. As veri-
fied by the experiments, we confirmed that our meth-
ods achieved better performance with much smaller
iteration compared to the existing approximated DP-
based RL algorithms (Mnih et al., 2013; Mnih et al.,
2016).
5 EXPERIMENTS
To show the effectiveness of the proposed concept of
BOOK, we tested our algorithm on 4 problems from
3 domains. These are carpole (Barto et al., 1983), ac-
robot (Geramifard et al., 2015), Box2D (Catto, 2011)
lunar lander, and Q*bert from Atari 2600 games.
All the experiments were performed using OpenAI
gym (Brockman et al., 2016).
The purpose of the experiments is to answer the
following questions: (1) Can we effectively represent
valuable information for RL among the entire state-
action space and find important states? If so, can this
information be effectively transfered to train other RL
agent? (2) Can the information generated in this way
be utilized to train the network in different architec-
ture? For example, can a BOOK generated by DQN
be effectively used to train A3C network?
5.1 Performance Analysis
In these experiments, we first trained the conven-
tional network of A3C or DQN. During the training
of the conventional writer network, a BOOK is writ-
ten. Then, we tested the effectiveness of this BOOK
with two different scenarios. First, we trained the
RL networks using only the contents of the BOOK
as described in Section 4.5. For the second scenario,
we conducted additional training for the RL networks
that are already trained using the BOOK at first sce-
nario.
5.1.1 Performance of BOOK based Learning
Table 1 shows the performance when training the con-
ventional RL algorithm with only the contents of the
BOOK. The BOOK is written in the training of writer
network with DQN and A3C and published in size
of 1,000. Then, reader networks were trained with
this BOOK using several different algorithms such as
DQN, A3C, and Dueling DQN. This normally took
much less time (less than 1 minute in all experiments)
than the training of the conventional network from
the start without utilizing BOOK. Then, we tested
the performance of 100 random episodes without up-
dating the network. The column ‘Score’ in the table
shows the average score of this setting. The ‘Transi-
tion’ indicates the number of transitions (timesteps)
that each network has to go through to achieve the
same score without BOOK. The ’Ratio’ means the
ratio of the book size over transition to confirm the
sample efficiency of our method. For example, if
Dueling DQN learns the BOOK of size 1,000 from
A3C in Q*bert, it can get the score of 388.1. If this
network learns without BOOK, it has to go through
1,080K transitions. The ratio is 0.09%, which is 1,000
/ 1,080K.
As shown in Table 1, even if RL agents only learn
the small-sized BOOK, they can obtain scores simi-
lar to those of scores obtained when learning dozen
to thousands of times more transitions. In the Cart-
pole environment, particularly, all models obtained
the highest score of 500, except when DQN learn the
BOOK written by DQN.
However, the obtained scores are quite different
depending on the model that wrote the BOOK and
the model that learned the BOOK. In most environ-
ments and training models, learning the BOOK writ-
ten by A3C is better than learning the BOOK written
by DQN. Also, even if the same BOOK is used, the
performances are different according to the training
algorithm. DQN has lower performance than A3C
or Dueling DQN in most environments. The major
difference in each method is that DQN uses only Q
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
78

Table 1: Performance of BOOK based learning. Score: An average score that can be obtained by learning the BOOK of size
1,000. Transition: the number of timesteps that is needed for each reader model to get the same ‘Score’ without learning a
BOOK. Ratio: a ratio of the size of a BOOK over Transition, Ratio = the size of BOOK / Transition.
MODEL CARTPOLE ACROBOT LUNAR LANDER Q*BERT
WRITER READER SCORE TRANSITION RATIO SCORE TRANSITION RATIO SCORE TRANSITION RATIO SCORE TRANSITION RATIO
DQN 428.3 352K 0.28% -280.7 13K 7.7% -251.7 9.7K 10.3% 196.9 566K 0.18%
DQN A3C 500.0 324K 0.31% -281.6 162K 0.62% -178.2 337K 0.30% 302.5 182K 0.55%
DUELING 500.0 624K 0.16% -370.2 10K 10.0% -127.4 12K 8.3% 324.6 931K 0.11%
DQN 500.0 792K 0.13% -172.1 49K 2.0% -241.4 9.9K 10.1% 290.0 880K 0.11%
A3C A3C 500.0 324K 0.31% -91.8 372K 0.27% -144.9 520K 0.19% 436.0 383K 0.26%
DUELING 500.0 624K 0.16% -177.9 32K 3.1% -160.5 10K 10.0% 388.1 1,080K 0.09%
value, and A3C and Dueling DQN use state-value and
advantage. Dueling DQN got good scores in most
environments, but in the case of Acrobot, using the
BOOK by DQN, it was lower than all other mod-
els. This indicates that the information stored in the
BOOK can be more or less useful depending on the
reader RL method.
5.1.2 Performance of Additional Training after
Learning the BOOK
The graphs in Figure 3 show the performance when
the BOOK is used for pre-training the conventional
RL networks. After learning the BOOK, each net-
work is trained by each network-specific method. For
this study, we conducted the experiments with two
different settings: (1) training the RL network using
the BOOK generated by the same learning method,
(2) training the RL network using the BOOK gener-
ated by the different learning method. For the first
setting, we trained the network and BOOK using
A3C (Mnih et al., 2016), while in the second, we gen-
erated the BOOK using DQN (Mnih et al., 2013) and
trained the network with A3C (Mnih et al., 2016).
The results of these two different settings are
the upper and the lower rows of Figure 3, respec-
tively. In the upper row, the ‘blue’ line shows the
score achieved through training an A3C network from
scratch, the ‘yellow’ horizontal line shows the base
score which can be achieved through training other
A3C network only with a BOOK which is published
by a trained A3C network. The ‘red’ line shows the
additional training results after training the A3C net-
work with BOOK. In the lower row, the three lines
mean the same with the upper row except that the
BOOK is published by a different RL network, DQN.
As shown in Figure 3, the scores achieved from
pre-trained networks using a BOOK were almost the
same as the highest scores achieved from conven-
tional methods. Furthermore, additional training on
the pre-trained networks was quite effective since
they achieved higher scores than conventional meth-
ods as training progresses. Especially, BOOK was
very powerful when it is applied to a simple envi-
ronment like Cartpole, which achieved much higher
Table 2: Average scores that can be obtained by learning a
BOOK of a certain size and the number of transitions that
is needed for A3C to get the same score.
CARTPOLE ACROBOT Q*BERT
SIZE SCORE TRANSITION SCORE TRANSITION SCORE TRANSITION
250 114.0 25.8K -143.8 330K 231.6 78K
500 500.0 324K -158.5 204K 371.8 271K
1000 500.0 324K -91.8 372K 436.0 383K
2000 500.0 324K -93.2 363K 520.0 618K
score than conventional training methods. Some ex-
periments show that the maximum score of ’BOOK +
A3C’ is same with that of ’A3C’ but this is because
their environments have a limited maximum score.
Also, almost every experiments show that the red
score starts from lower than the yellow baseline as ad-
ditional training progresses. It may seem weired but it
is very natural phenomenon for the following reasons:
(1) As additional training begins, exploration is per-
formed. (2) BOOK stores Q value with actual reward
without bootstrapping, but DQN and A3C use boot-
strapped Q value, thus they (actual and bootstrapped
Q-values) don’t match exactly.
5.2 Qualitative Analysis
To further investigate the characteristics of the pro-
posed method, we conducted some experiments by
changing the hyper-parameters.
5.2.1 Learning with Different Sizes of BOOKs
To investigate the effect of the BOOK size, we tested
the performance of the proposed method using the
published BOOK size of 250, 500, 1000, and 2000.
Table 2 shows the score obtained by our baseline net-
work which was trained using only the BOOK in a
specified size. Also, in the table, we showed the num-
ber of transitions (experiences) that a conventional
A3C has to go through to achieve the same score. This
result shows that a relatively small number of linguis-
tic states can achieve a score similar to that of the con-
ventional network with only the published BOOK. As
shown in the table, training an agent in a complex en-
vironment requires more information and therefore a
larger BOOK is needed.
BOOK: Storing Algorithm-Invariant Episodes for Deep Reinforcement Learning
79

Figure 3: Performance for additional training after learning the BOOK. The upper row shows the case where a book is created
in A3C and it is trained in a new A3C agent, and the lower row shows the case where a book is created in DQN and trained in
A3C. Blue: Conventional method (A3C or DQN); Yellow: The score of the network that was trained only with the BOOK;
Red: The network was trained using conventional method after learning the BOOK; An epoch corresponds to one hundred
thousand transitions (across all threads). Light colors represent the raw scores and dark colors are smoothed scores.
5.2.2 Effects of Different Quantization Levels
In this experiment, we confirmed the performance dif-
ference according to the resolutions of linguistic func-
tion. First of all, we differentiated the quantization
level and published a BOOK of 1,000 size to check
the difference of performance according to the resolu-
tions of linguistic function. Figure 4(a) shows the dis-
tribution of scores according to the quantization level
(quartile bar) and the average number of hits in each
linguistic state c
k
included in the BOOK (red line).
From Fig. 4(a), we found that the number of hit
for each linguistic state decreases exponentially as the
quantization level increases. Also, when the quantiza-
tion level is high, the importance of c
k
in equation (7)
couldn’t be defined and its score decreased because
hit ratio becomes low. It can be seen that the highest
and stable scores are obtained at quantization level of
64 and 128.
5.2.3 Comparison of the Priority Methods
Also, to verify the usefulness of our priority method
(6), we tested the algorithm with different design
of the priority; random selection, frequency only,
method from prioritized experience replay (Schaul
et al., 2015), and the proposed priority method. A
book capacity K was set to 10,000 for this test.
As shown in Figure 4(b), the algorithm applying
the proposed priority term achieved clearly far supe-
rior performance than other settings. We note that the
case of using only frequency term marked the lowest
(a) Quantization Level (b) Priority Methods
Figure 4: (a) Distribution of scores according to the quanti-
zation level and the average number of hits in each Linguis-
tic State c
k
included in the BOOK. (b) Distribution of scores
when we use three different methods than our proposed pri-
ority method. Freq: state visiting frequency, Rand: ran-
dom state selection, PER: priority term from prioritized ex-
perience replay. All data were tested in Cartpole, and scores
were measured in 100 random episodes. The green triangle
and the red bar indicate the mean and the median scores,
respectively. Blank circles are outliers.
performance, even lower than the random case. This
is because the learning process proceeds only with
the experiences that appear frequently when the pri-
ority is set only by the frequency. Correspondingly,
the information of the critical, but rarely occurred ex-
periences are not reflected enough to the training and
hence, leads to inferior performance.
The priority term of the prioritized experience re-
play also marked poor results. It is better than using
frequency only as a priority, but even lower than ran-
dom selection. This algorithm is intended to give pri-
ority to the states that are not yet well learned among
the entire experience replay memory, and is not de-
signed to extract a few core states.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
80

5.3 Implementation Detail
We set the maximum capacity K of a BOOK to
100,000 while writing the BOOK. To maintain the
size of the BOOK, only the top 50% experiences are
preserved and the remaining experiences are deleted
to save new experiences when the capacity exceeds K.
As a linguistic rule, each dimension of the input state
was quantized into 128 levels. We set the discount
factor γ for rewards to 0.99. Immediate reward r was
clipped from −1 to 1 at Q*bert and generalized with
tanh(r/10) for the other 3 environments (Cartpole,
Acrobot and Lunar Lander). The frequency limit F
l
was set to 20 and the decay period T was set to 100.
Our method adopted the same network architec-
ture with A3C for Atari Q*bert. But for the other 3
environments, we replaced the convolution layers of
A3C to one fully connected layer with 64 units fol-
lowed by ReLU activation. Each environment was
randomly initialized. For Q*bert, it skipped a max-
imum of 30 initial frames for random initialization
as in (Bobrenko, 2016). We used 8 threads to train
A3C network and instead of using shared RMSProp,
ADAM (Kingma and Ba, 2014) optimizer was used.
All the learning rates used in our experiments were set
to 5× 10
−4
. To write a BOOK, we trained only 1 mil-
lion steps (experiences) for Cartpole and Acrobot and
5 million steps for Lunar Lander and Q*bert. After
publishing a BOOK, we pre-trained a randomly ini-
tialized network for 10,000 iterations with batch size
8, using only the contents in the published BOOK. It
took less than a minute to learn a BOOK with 1 thread
on Nvidia Titan X (Pascal) GPU and 4 CPU cores, for
Q*bert.
6 CONCLUSION
In this paper, we have proposed a memory structure
called BOOK that enables sharing knowledge among
different deep RL agents. Experiments on multiple
environments show that our method can achieve a
high score by learning a small number of core experi-
ences collected by each RL method. It is also shown
that the knowledge contained in the BOOK can be
effectively shared between different RL algorithms,
which implies that the new RL agent does not have to
repeat the same trial and error in the learning process
and that the knowledge gained during learning can be
kept in the form of a record.
As future works, we intend to apply our method
to the environments with a continuous action space.
Linguistic functions can also be defined in other ways,
such as neural networks, for better clustering and fea-
ture representation.
ACKNOWLEDGEMENT
The research was supported by the Green Car devel-
opment project through the Korean MTIE (10063267)
and ICT R&D program of MSIP/IITP (2017-0-
00306).
REFERENCES
Abbeel, P., Coates, A., Quigley, M., and Ng, A. Y. (2007).
An application of reinforcement learning to aerobatic
helicopter flight. Advances in neural information pro-
cessing systems, 19:1.
Barto, A. G., Sutton, R. S., and Anderson, C. W. (1983).
Neuronlike adaptive elements that can solve difficult
learning control problems. IEEE transactions on sys-
tems, man, and cybernetics, (5):834–846.
Bellman, R. (1957). A markovian decision process. Tech-
nical report, DTIC Document.
Bertsekas, D. P. and Tsitsiklis, J. N. (1995). Neuro-dynamic
programming: an overview. In Decision and Control,
1995., Proceedings of the 34th IEEE Conference on,
volume 1, pages 560–564. IEEE.
Bobrenko, D. (2016). Asynchronous deep reinforcement
learning from pixels.
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nai gym. arXiv preprint arXiv:1606.01540.
Catto, E. (2011). Box2D: A 2D physics engine for games.
Chang, K.-W., He, H., Daum
´
e III, H., and Langford, J.
(2015). Learning to search for dependencies. arXiv
preprint arXiv:1503.05615.
Chang, S., Yang, J., Choi, J., and Kwak, N. (2018). Genetic-
gated networks for deep reinforcement learning. In
Advances in Neural Information Processing Systems,
pages 1752–1761.
Geramifard, A., Dann, C., Klein, R. H., Dabney, W., and
How, J. P. (2015). Rlpy: a value-function-based
reinforcement learning framework for education and
research. Journal of Machine Learning Research,
16:1573–1578.
Harmon, M. E., Baird III, L. C., and Klopf, A. H. (1995).
Advantage updating applied to a differential game. In
Advances in neural information processing systems,
pages 353–360.
Hasselt, H. V. (2010). Double q-learning. In Advances in
Neural Information Processing Systems, pages 2613–
2621.
Jaakkola, T., Jordan, M. I., and Singh, S. P. (1994). On the
convergence of stochastic iterative dynamic program-
ming algorithms. Neural computation, 6(6):1185–
1201.
BOOK: Storing Algorithm-Invariant Episodes for Deep Reinforcement Learning
81

Kingma, D. and Ba, J. (2014). Adam: A method
for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Krishnamurthy, A., EDU, C., Daum
´
e III, H., and EDU, U.
(2015). Learning to search better than your teacher.
arXiv preprint arXiv:1502.02206.
Langley, P. (2000). Crafting papers on machine learn-
ing. In Langley, P., editor, Proceedings of the
17th International Conference on Machine Learning
(ICML 2000), pages 1207–1216, Stanford, CA. Mor-
gan Kaufmann.
Lin, L.-J. (1992). Self-improving reactive agents based on
reinforcement learning, planning and teaching. Ma-
chine learning, 8(3-4):293–321.
Lin, L.-J. (1993). Reinforcement learning for robots using
neural networks. PhD thesis, Fujitsu Laboratories Ltd.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap, T.,
Harley, T., Silver, D., and Kavukcuoglu, K. (2016).
Asynchronous methods for deep reinforcement learn-
ing. In International Conference on Machine Learn-
ing, pages 1928–1937.
Mnih, V., Kavukcuoglu, K., Silver, D., Graves, A.,
Antonoglou, I., Wierstra, D., and Riedmiller, M.
(2013). Playing atari with deep reinforcement learn-
ing. arXiv preprint arXiv:1312.5602.
Peters, J., Vijayakumar, S., and Schaal, S. (2003). Rein-
forcement learning for humanoid robotics. In Pro-
ceedings of the third IEEE-RAS international confer-
ence on humanoid robots, pages 1–20.
Pritzel, A., Uria, B., Srinivasan, S., Badia, A. P., Vinyals,
O., Hassabis, D., Wierstra, D., and Blundell, C.
(2017). Neural episodic control. In International Con-
ference on Machine Learning, pages 2827–2836.
Riedmiller, M. (2005). Neural fitted q iteration–first ex-
periences with a data efficient neural reinforcement
learning method. In European Conference on Ma-
chine Learning, pages 317–328. Springer.
Ross, S. and Bagnell, J. A. (2014). Reinforcement and
imitation learning via interactive no-regret learning.
arXiv preprint arXiv:1406.5979.
Rummery, G. A. and Niranjan, M. (1994). On-line Q-
learning using connectionist systems. University of
Cambridge, Department of Engineering.
Salimans, T., Ho, J., Chen, X., and Sutskever, I. (2017).
Evolution strategies as a scalable alternative to rein-
forcement learning. arXiv preprint arXiv:1703.03864.
Schaul, T., Quan, J., Antonoglou, I., and Silver, D.
(2015). Prioritized experience replay. arXiv preprint
arXiv:1511.05952.
Schulman, J., Levine, S., Abbeel, P., Jordan, M. I., and
Moritz, P. (2015). Trust region policy optimization.
In ICML, pages 1889–1897.
Silver, D., Huang, A., Maddison, C. J., Guez, A., Sifre, L.,
Van Den Driessche, G., Schrittwieser, J., Antonoglou,
I., Panneershelvam, V., Lanctot, M., et al. (2016).
Mastering the game of go with deep neural networks
and tree search. Nature, 529(7587):484–489.
Sutton, R. S. (1988). Learning to predict by the methods of
temporal differences. Machine learning, 3(1):9–44.
Sutton, R. S., McAllester, D. A., Singh, S. P., Mansour, Y.,
et al. (1999). Policy gradient methods for reinforce-
ment learning with function approximation. In NIPS,
volume 99, pages 1057–1063.
Van Hasselt, H., Guez, A., and Silver, D. (2016). Deep rein-
forcement learning with double q-learning. In AAAI,
pages 2094–2100.
Wang, Z., Schaul, T., Hessel, M., van Hasselt, H., Lanc-
tot, M., and de Freitas, N. (2015). Dueling network
architectures for deep reinforcement learning. arXiv
preprint arXiv:1511.06581.
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8(3-4):279–292.
Werbos, P. J. (1992). Approximate dynamic programming
for real-time control and neural modeling. Handbook
of intelligent control.
Williams, R. J. (1987). A class of gradient-estimating algo-
rithms for reinforcement learning in neural networks.
In Proceedings of the IEEE First International Con-
ference on Neural Networks, volume 2, pages 601–
608.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
82
