
Semantic Differencing of Statecharts for Object-oriented Systems
Imke Drave, Robert Eikermann, Oliver Kautz and Bernhard Rumpe
Software Engineering, RWTH Aachen University, Aachen, Germany
Keywords:
Semantics, Semantic Differencing, Model Reasoning, Statecharts, UML.
Abstract:
Statecharts are well-suited to describe the behavior of objects in object-oriented systems. Effective statechart
evolution analysis for detecting errors and exploring design alternatives requires to reveal the semantic dif-
ferences from one statechart to another. Previous work has not produced approaches to semantic differencing
of statecharts for object-oriented systems. This paper defines a syntax and a semantics for reduced UML/P
statecharts and presents an explicit semantics-preserving translation from statecharts to finite automata. This
enables to reduce semantic statechart differencing to language inclusion checking between finite automata.
The translation is formally defined and proven to be correct. This paper further introduces operators for hid-
ing and matching events to compare statecharts semantically on different levels of abstraction. The result is a
sound and complete method for semantic differencing of statecharts and abstraction methods, which ultimately
facilitates semantic statechart evolution analysis.
1 INTRODUCTION
Statecharts model the behavior of reactive systems
and have originally been introduced in (Harel, 1987).
The UML/P (Rumpe, 2016) is a variant of the UML
targeting implementability and code generation. The
UML/P focuses on modeling object-oriented systems
and is specifically suited for Java as target language.
The behavior of an UML/P statechart models a
high-level view on the behavior of objects of a class.
With this, it abstracts from low-level implementation
details. The states of the statechart correspond to con-
trol states of objects. The behaviors modeled by a
statechart abstract from data states. Nevertheless, data
states can be manipulated within reactions of a state-
chart but they do not influence the statechart’s behav-
ior with respect to its control flow.
We formally define a reduced abstract syntax for
UML/P statecharts and a semantics mapping based
on possible execution traces, which represent the be-
haviors of the statechart. We assume that the set of
a statechart’s control states is representable by a fi-
nite set and that each statechart only contains finitely
many transitions. The semantic difference from one
statechart SC
1
to another statechart SC
2
is defined
as the set δ(SC
1
,SC
2
) of all behaviors in the seman-
tics of SC
1
that are no members in the semantics of
SC
2
. Each behavior b ∈ δ(SC
1
,SC
2
) is thus a behav-
ior modeled in statechart SC
1
that is not modeled in
statechart SC
2
. The behavior b is interpretable as a
possible behavior of an object that behaves as speci-
fied with SC
1
, which is no behavior of any object that
behaves as specified with SC
2
. It represents a possi-
ble observation of reactions to environmental inputs
(method calls) of an object. This paper further de-
fines a translation from statecharts to finite automata.
The translation enables to reduce semantic differenc-
ing of statecharts to language inclusion checking be-
tween the automata, which is a well-known decidable
problem (Hopcroft et al., 2006). Two statecharts may
be inequivalent on one level of abstraction but equiva-
lent on another. We present two statechart abstraction
methods that enable to compare statecharts semanti-
cally on different levels of abstraction.
The next section recaps details about UML/P stat-
echarts in the context of modeling object oriented sys-
tems. Section 3 presents a motivating example for
semantic differencing of statecharts. Subsequently,
Section 4 presents formal preliminaries grounding our
approach. Then, Section 5 presents a reduced abstract
syntax and a semantics for statecharts. Based on this,
Section 6 presents a method for semantic differenc-
ing of statecharts based on a translation to finite au-
tomata. Then, Section 7 presents abstraction meth-
ods. Finally, Section 8 discusses related work, before
Section 9 concludes.
272
Drave, I., Eikermann, R., Kautz, O. and Rumpe, B.
Semantic Differencing of Statecharts for Object-oriented Systems.
DOI: 10.5220/0007351902720280
In Proceedings of the 7th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2019), pages 272-280
ISBN: 978-989-758-358-2
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 UML/P STATECHARTS
UML/P statecharts (Rumpe, 2016) are intended to de-
scribe the behavior of objects in object-oriented sys-
tems. States in UML/P statecharts are interpreted as
control states (Rumpe, 2016). With this, a statechart
abstracts from the actual data states of objects during
runtime. An object’s state is divided into its control
state and its data state, determined by the values as-
signed to its attributes. UML/P statecharts abstract
from implementation details by abstracting from the
possibly infinite set of actual data states with finitely
many control states. Each control state represents a
class of possibly infinitely many data states. In stat-
echarts, initial states correspond to the object’s ini-
tial control state after the constructor has been called.
As modern garbage collectors delete detected un-
reachable objects, there are no explicit final states in
UML/P statecharts (Rumpe, 2016). Transitions be-
tween states correspond to the execution of methods.
A transition is taken upon the occurrence of its stim-
ulus event, provided that the object’s control state is
equal to the transition’s source state. In UML/P state-
charts, the occurrence of a stimulus event corresponds
to calling a method of an object (including its argu-
ments). The reaction of the object to a method call
is modeled by the transition’s reaction. A reaction
is a sequence of statements, e.g., method calls or at-
tribute assignments, which are executed in the body
of the method corresponding to the stimulus (Rumpe,
2016). UML/P statecharts abstract from object re-
cursion, i.e., transitions including reactions that call
other public methods (stimuli) of the same object. It
may nevertheless appear in private methods as long as
the statechart’s control state is not manipulated. The
above interpretation of statecharts and the abstraction
from recursion enable a simplifying transformation
to a statechart normal form as described in (Rumpe,
2016). This transformation eliminates, for example,
hierarchically nested states. We will define an abstract
statechart syntax based on the simple normal form to
facilitate a semantics mapping definition.
3 EXAMPLE
Webshops usually provide virtual carts. Customers
add items to a cart by selecting items offered on prod-
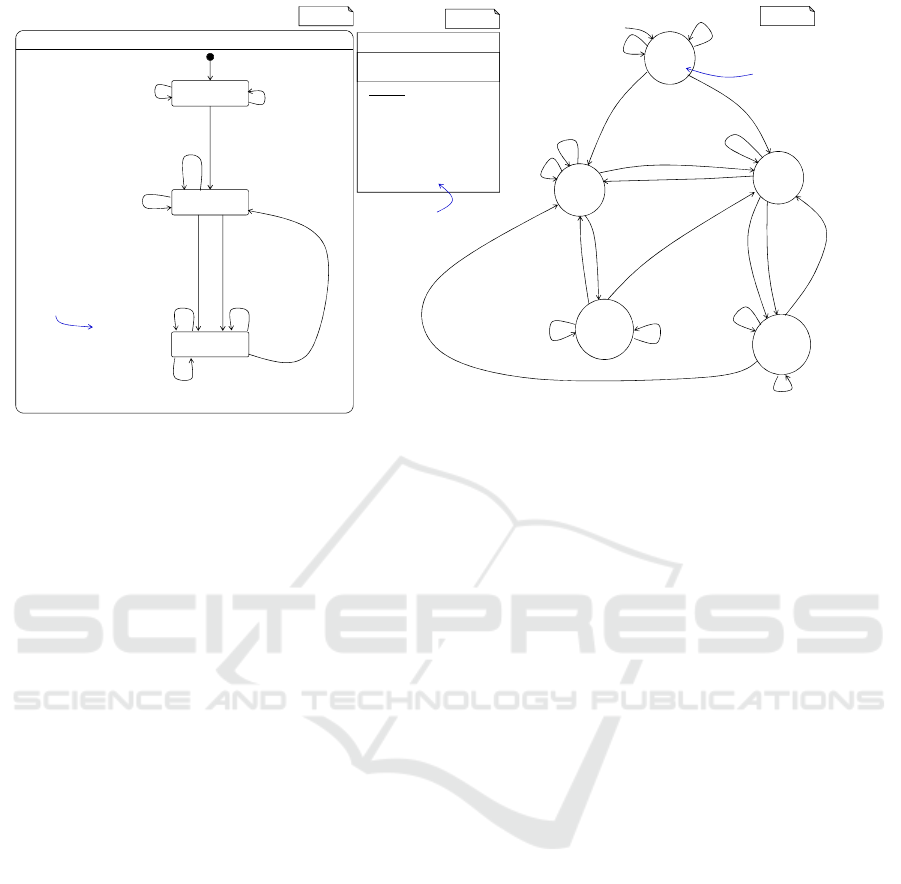
uct sites. Figure 1 depicts a statecharts describing a
webshop system’s behavior when processing orders.
On the left, statechart SC models the behavior of ob-
jects of the Order class specified by the class dia-
gram in the middle. Our analysis performs a trans-
formation into a nondeterministic finite automaton as
shown on the right of Figure 1. After construction,
an order object resides in the Created-state, where
it is not yet paid. A place-order button executes the
place() method, which triggers the execution of re-
questPay(price) setting the paid attribute of the or-
der, before it takes the Placed state. Once placed, the
customer may either cancel or re-place() and pay the
order. Shipment is initiated by tryShip(), which will
only trigger the transition to Completed if paid==true,
since the webshop explicitly requires that only paid
orders are shipped. If so, the system executes ship(),
which sends the ordered items to the customer. In
case a customer cancels her order, a cancellation re-
quest is sent to the system. As modeled by SC, can-
celing an order is also possible after the order has al-
ready been shipped. A webshop developer now no-
tices that canceling orders after shipping lead to neg-
ative ratings for the webshop. The developer decides
to inhibit canceling shipped orders. To this effect, she
modifies the statechart SC by replacing the request-
Cancel() reaction in state Completed by a new method
illegalCancel(), which notifies the customer that a can-
cellation of the order is not possible. The statechart is
updated to suit the new requirement. The developer
wants to understand how the syntactic change influ-
enced the statechart’s semantics. She thus uses our
method for semantic statechart differencing. It turns
out that the updated version of SC has incomparable
semantics to the original, i.e., there exists a behav-
ior modeled in SC that is not possible after the up-
date and vice versa. The developer is presented with
two witnesses that are concrete examples of seman-
tic differences: A witness for the semantic difference
from the original statechart to the statechart after re-
placing requestCancel() by illegalCancel() is (place(),
paid=requestPay(price)), (tryShip(), ship()), (cancel(),
requestCancel()). Vice versa, a witness for the se-
mantic difference from the changed SC to the original
SC is the behavior (place(), paid=requestPay(price)),
(tryShip(), ship()), (cancel(), illegalCancel()).
4 PRELIMINARIES
The empty word is denoted by ε. An alphabet is a
non-empty finite set A satisfying ε /∈ A. A
∗
denotes
the set of all finite sequences (words) over an alphabet
A. For every alphabet A, ε ∈ A
∗
holds. Let u,v ∈ A
∗
be words. u · v (or uv) denotes the result of appending
the word v to the word u. |u| denotes the length of u
where |ε| = 0. u.i denotes the (i + 1)-th symbol in u
with |u| > i. For a symbol s ∈ A, we denote by s : u
the result of prepending s to u. d(u) denotes the result
from deleting the first symbol from u 6= ε. For a set
Semantic Differencing of Statecharts for Object-oriented Systems
273
Order
Created
[paid==false]
place() /
paid=requestPay(price);
[paid == true]
tryShip() /
ship()
Completed
Placed
cancel() /
requestCancel()
[paid==true]
tryShip() /
ship()
place() /
paid=requestPay(price);
cancel() /
requestCancel()
place() / paid=
requestPay(price)
[paid==false]
tryShip()
cancel()
tryShip()
UML/P SC
[paid == false]
tryShip()
developer replaces
requestCancel() by
illegalCancel()
Completed,
false
Placed,
false
Placed,
true
Created,
false
Completed,
true
place() / paid=
requestPay(price)
place() / paid=
requestPay(price)
place() / paid=
requestPay(price)
tryShip() /
ship()
tryShip() /
ship()
place() / paid=
requestPay(price)
place() / paid=
requestPay(price)
place() / paid=
requestPay(price)
place() / paid=
requestPay(price)
place() / paid=
requestPay(price)
NFA(SC)
cancel() /
requestCancel()
cancel() /
requestCancel()
cancel() /
requestCancel()
cancel()
tryShip()
tryShip()
tryShip()
paid value
CD
Order
-boolean paid
-int price
+Order()
+Boolean place()
+Boolean tryShip()
+Boolean cancel()
-Boolean requestPay(price)
-ship()
-requestCancel()
-illegalCancel()
added during
development
place() / paid=
requestPay(price)
cancel() /
requestCancel()
place() / paid=
requestPay(price)
Figure 1: Statechart modeling the behavior of a webshop system, the associated class, and the corresponding nondeterministic
finite automaton (NFA).
of symbols B ⊆ A, we denote by u ↓ B the result of
removing all occurrences of the symbols contained in
B from u. For all u ∈ A
∗
and B ⊆ A, the operator is
recursively defined by the following equation:
u ↓ B =
ε if u = ε
u.0 : (d(u) ↓ B) if |u| > 0 ∧ u.0 /∈ B
d(u) ↓ B if |u| > 0 ∧ u.0 ∈ B
We lift functions m : A → A mapping elements of a
set A to elements of the same set to words u ∈ A
∗
over A in a point-wise manner, i.e., m(ε) = ε and
m(u) = m(u.0) : m(d(u)) for all ε 6= u ∈ A
∗
.
An nondeterministic finite automaton (NFA) (e.g.,
(Hopcroft et al., 2006)) is a tuple (Q,Σ,δ,Q
0
,F)
where Q is a finite set of states, Σ is an alphabet,
δ ⊆ Q × Σ × Q is the transition relation, Q
0
is a set
of initial states, and F is a set of final states. Let
A = (Q,Σ,δ,Q
0
,F) be an NFA. A run of A on a word
w = w
1
,w
2
,...,w
n
∈ Σ
∗
is a finite sequence of states
r = r
0
,r
1
,...,r
n
∈ Q
∗
satisfying r
0
∈ Q
0
, r
n
∈ F and
(r
i
,w
i+1
,r
i+1
) ∈ δ for all 0 ≤ i < n. The NFA A ac-
cepts a word w iff a run of A on w exists. The language
recognized by A is defined as L (A) = {w ∈ Σ
∗
| A
accepts w}, i.e., all words accepted by A. There are
well-known algorithms to check whether the language
recognized by one NFA is included in the language
recognized by another NFA (Hopcroft et al., 2006).
5 STATECHART SYNTAX AND
SEMANTICS
A complete definition of a modeling language con-
sists of the following parts (Cengarle et al., 2009;
Gr
¨
onniger and Rumpe, 2011): Concrete Syntax, ab-
stract syntax, reduced abstract syntax, semantic do-
main, and semantic mapping.
The concrete syntax is a model’s representation
that the user interacts with. A definition of the graph-
ical and a textual concrete syntax for statecharts as
used in this paper is available in (Rumpe, 2016). This
paper’s approach abstracts from a concrete syntactic
representation. The abstract syntax is a reduced and
compact representation of the concepts that can be
modeled using the concrete syntax. For every model
in the concrete syntax, there must exist a model in
the abstract syntax that the model is mapped to. Dif-
ferent models in the concrete syntax may be mapped
to the same model in the abstract syntax. The re-
duced abstract syntax is a subset of the abstract syn-
tax of a modeling language. It only includes a sub-
set of the abstract syntax without losing expressibil-
ity. Normal forms of propositional formulas are ex-
amples for reduced abstract syntaxes. A reduced ab-
stract syntax eases the definition of the semantics of a
language (Cengarle et al., 2009). Section 5.1 presents
a reduced abstract syntax for UML/P statecharts. A
translation from the abstract syntax (including hier-
archy, OR-states, epsilon-transitions, entry and exit
actions) to the reduced abstract syntax is described
in (Rumpe, 2016). The semantic domain contains the
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
274

elements of the semantics of a model. In this pa-
per, the semantic domain for statecharts is a set of
all finite sequences of stimuli/reaction tuples. Each
sequence represents a behavior as a trace of method
calls. The stimuli represent methods called on an ob-
ject of a statechart’s class and the reactions contain
method calls performed by the object. The semantic
mapping relates the elements of the reduced abstract
syntax to elements of the semantic domain. In this
paper, the semantic mapping maps each statechart to
the set of possible behaviors of its class’s objects.
5.1 Reduced Abstract Syntax
State hierarchies in UML/P statecharts can be elimi-
nated by a transformation (Rumpe, 2016). Therefore,
in the following we assume statecharts to be flat and
their set of control states to be finitely representable.
Thus, the types of variables used on guards must also
be finitely representable. Examples for finite types
are the primitive types short, int, and boolean. Let E
denote a countable infinite set of events. For exam-
ple, the set E may contain all expressions for calling
methods or attribute assignments. The following de-
fines the reduced abstract syntax for flat statecharts:
Definition 1 (Statechart). A statechart is a tuple
(I, O, S,T,S
0
) where
• I,O ⊂ E with I ∩ O =
/
0 are finite sets of input and
output events,
• S is a finite set of states,
• T ⊆ S × S × I × O
∗
is a finite set of transitions,
• S
0
⊆ S is a set of initial states.
Notation. Let t = (src,tgt,st,ev) ∈ T be a tran-
sition. Then, src(t) = src denotes the transition’s
source state, trg(t) = tgt denotes the transition’s tar-
get state, st(t) = st denotes the transition’s stimulus,
and r(t) = ev denotes the transition’s reaction.
We assume that each statechart models the behav-
ior of instances of a class in an object-oriented sys-
tem. Each state of the statechart is a control state
that represents a possibly infinite set of actual data
states. For instance, a statechart’s class may contain
several attributes. The statechart abstracts from the
data states of objects of the class (i.e., assignments to
the attributes) as it only contains control states. Al-
though the data state may be manipulated via execut-
ing transitions, it never influences the behavior of the
statechart. If the assignment to an attribute is meant to
influence a statechart’s behavior, it must be explicitly
encoded as control state. The set of initial states mod-
els the possible initial control states of objects of the
statechart’s class after their creation. The set of input
events of a statechart contains expressions represent-
ing the public methods of the statechart’s class. Out-
put events represent statements in the bodies of these
methods. These are, for example, statements for call-
ing private methods of the same class, statements for
calling methods of attributes of the class, or attribute
assignments. Recursion in statecharts induces several
semantic ambiguities (Rumpe, 2016). Therefore, the
set of input events is required to be disjoint to the set
of output events, which prevents recursion on state-
chart model level. However, recursive method calls
may appear, for example, inside private methods.
5.2 Behavior Semantics
UML/P statecharts can be interpreted as NFAs with
input and output alphabets. With this, the execution
of a transition is an atomic process, which cannot be
interrupted: When a statechart receives an event, it
takes a transition with the corresponding stimulus and
must execute the transition’s reaction before receiv-
ing the next event is possible. Immediately after exe-
cuting the reaction, the statechart switches its state to
the transition’s target state. Further, in UML/P stat-
echarts, events in reactions of transitions cannot trig-
ger further transitions, i.e., no recursion is allowed on
statechart level. The following definition formalizes
the intuition behind the notion of execution:
Definition 2 (Execution). An execution of a state-
chart SC = (I,O,S, T, S
0
) is a finite alternating se-
quence s
0
,t
1
,s
1
,t
2
,...,s
n
(n ≥ 0) of states and transi-
tions ending in a state such that
1. s
0
∈ S
0
,
2. s
i
∈ src(t
i+1
) for all 0 ≤ i < n, and
3. s
i
∈ trg(t
i
) for all 0 < i ≤ n.
Ex(SC) denotes the set of all executions of SC.
With the above definition, a statechart execution
starts in one of the statechart’s initial states. Then, the
statechart iteratively executes a transition starting at
its current state and then enters the transition’s target
state. A transition may end in any of the statechart’s
states, i.e., there are no explicit final states. This re-
flects that unreferenced objects in an object-oriented
system may be garbage collected, which is a process
that does not depend on an object’s state.
Executions comprise the internal state changes of
a statechart that are invisible to its environment. The
behavior of an execution only captures the visible
events while the statechart performs the execution:
Definition 3 (Behavior). Let SC = (I,O,S,T,S
0
) be
a statechart. The behavior beh(ex) of an execu-
tion ex = s
0
,t
1
,s
1
,t
2
,...,s
n
∈ Ex(SC) of the state-
Semantic Differencing of Statecharts for Object-oriented Systems
275

chart SC is defined as the sequence beh(ex) =
(st(t
1
),r(t
1
)),..., (st(t
n
),r(t
n
)) ∈ (I × O
∗
)
∗
.
With the above, a behavior of an execution is the
sequence of tuples of stimuli and reactions of the tran-
sitions occurring in the execution. The semantics of a
statechart is the set of all behaviors of the statechart.
Definition 4. The semantics JSCK of a statechart SC
is the set of all behaviors of all executions of SC, i.e.,
JSCK = {beh(ex) | ex ∈ Ex(SC)}.
6 SEMANTIC DIFFERENCING
OF STATECHARTS
This section formally introduces semantic differenc-
ing of statecharts and presents a method that can be
performed on push-button basis.
Definition 5 (Semantic Difference). The semantic
difference of a statechart SC
1
to a statechart SC
2
is
defined as δ(SC
1
,SC
2
) = JSC
1
K \JSC
2
K.
With this, the semantic difference contains all be-
haviors modeled in one statechart that are not mod-
eled in another statechart. If δ(SC
1
,SC
2
) =
/
0, then
the Statechart SC
1
is a refinement of the statechart
SC
2
, i.e., SC
1
has no behavior that SC
2
does not have.
Therefore, the former statechart contains less under-
specification as the latter. In model-driven develop-
ment, statecharts are naturally refined in reaction to
receiving additional requirements.
As the semantics of a statechart is typically an infi-
nite set, checking whether δ(SC
1
,SC
2
) =
/
0 is, in gen-
eral, not trivial. In the following, we present a sound
and complete method to check whether one statechart
refines another statechart. In case of non-refinement,
the method yields an element w ∈ δ(SC
1
,SC
2
), which
is a concrete witness for a behavior possible in the
one statechart that is not possible in the other state-
chart. To this effect, we present a translation from
statecharts to NFAs and reduce statechart refine-
ment checking to language inclusion checking be-
tween NFAs. As language inclusion checking be-
tween NFAs is fully automatable, we obtain an au-
tomated method for semantic statechart differencing.
6.1 Mapping Statecharts to Automata
For every statechart, there exists an NFA such that the
language accepted by the NFA is equal to the set of
behaviors of the statechart. The following definition
explicates the construction of such an NFA:
Definition 6. Let SC = (I, O, S,T, S
0
) be a statechart.
The NFA NFA(SC) associated to SC is defined as
NFA(SC) = (S, Σ, δ, S
0
,S) where
• Σ = I × (
S
t∈T
{r(t)}),
• δ = {(u, (st,r),v) | (u,v,st,r) ∈ T } ⊆ S ×Σ × S.
As T is finite,
S
t∈T
{r(t)} is also finite. Thus, as
additionally I is finite, Σ is finite. Further S and S
0
⊆ S
are finite. Therefore, NFA(SC) is a well-defined NFA.
With Definition 6, every NFA input symbol corre-
sponds to a stimulus/reaction tuple of the statechart.
The recognized language of an NFA associated to a
statechart equals the statechart’s semantics.
Theorem 1. For every statechart SC, it holds that
JSCK = L (NFA(SC)).
Proof. Let SC = (I,O,S, T, S
0
) be a statechart and let
NFA(SC) = (S, Σ, δ, S
0
,S).
⊆: Let e = s
0
,t
1
,s
1
,t
2
,...,s
n
∈ Ex(SC) be an ex-
ecution of SC. We need to show that beh(e) ∈
L (NFA(SC)). By definition of execution, we have:
1. s
i
∈ src(t
i+1
) for all 0 ≤ i < n, and
2. s
i
∈ trg(t
i
) for all 0 < i ≤ n.
From this and the definition of δ, we can conclude
(s
i
,(st(t
i+1
),r(t
i+1
)),s
i+1
) ∈ δ for all 0 ≤ i < n. By
definition of execution, it holds that s
0
∈ S
0
. As every
state in NFA(SC) is accepting, we can conclude that
s
0
,s
1
,...,s
n
is a run of NFA(SC) on the word beh(e) =
(st(t
1
),r(t
1
)),..., (st(t
n
),r(t
n
)) ∈ L (NFA(SC)).
⊇: Let r = r
0
,r
1
,...,r
n
∈ S
∗
be a run of A on a
word w = (a
1
,b
1
),(a
2
,b
2
),...,(a
n
,b
n
) ∈ Σ
∗
. We need
to show that w ∈ JSCK. As r is a run on w, it holds that
r
0
∈ S
0
and (r
i
,(a
i+1
,b
i+1
),r
i+1
) ∈ δ for all 0 ≤ i < n.
By definition of δ, this implies (r
i
,r
i+1
,a
i+1
,b
i+1
) ∈
T for all 0 ≤ i < n. Now let t
i+1
= (r
i
,r
i+1
,a
i+1
,b
i+1
)
for all 0 ≤ i < n. This above implies that r
i
∈ src(t
i+1
)
for all 0 ≤ i < n. Further, the above implies r
i
∈ trg(t
i
)
for all 0 < i ≤ n. By definition of execution, we can
conclude that e = r
0
,t
1
,r
1
,t
2
,...,r
n
is an execution of
SC. As e is an execution of SC, it holds that beh(e) =
(st(t
1
),r(t
1
)),..., (st(t
n
),r(t
n
)) ∈ JSCK is a behavior of
SC. Observing st(t
i
) = a
i
and r(t
i
) = b
i
for all 0 < i ≤
n, we obtain (a
1
,b
1
),(a
2
,b
2
),..., (a
n
,b
n
) ∈ JSCK.
Figure 1 shows the reachable part of the NFA
associated with the webshop-order statechart intro-
duced Figure 1. The attribute paid used in guards
is expanded into the state space. For each of the
transitions with the stimulus place() and the reac-
tion paid=requestPay(price) in the statechart, there ex-
ist multiple transitions with the respective label from
each respective state in the NFA. For each of these
states, there exists one transition with the respective
label to the NFA state where the value of paid is as-
signed to false and one transition with the respective
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
276

label to the NFA state where the value of paid is as-
signed to true. This is the case, because the value as-
signed to the paid attribute in the transitions’ reactions
cannot be predetermined.
With Theorem 1, semantic differencing of state-
charts can be reduced to language inclusion checking
between NFAs. Thus, reuse of well known algorithms
from automata theory is possible (e.g., (Hopcroft
et al., 2006)). Given two statecharts SC
1
and SC
2
,
it holds that δ(SC
1
,SC
2
) =
/
0 iff L (NFA(SC
1
)) ⊆
L (NFA(SC
2
)). For checking whether there exist el-
ements in the semantic difference of a statechart to
another statechart, we can thus construct the NFAs as-
sociated to the statechart before performing language
inclusion checking on the NFAs. In case language in-
clusion checking yields a counterexample in form of
a word accepted by the one automaton that is not ac-
cepted by the other automaton, the word can be used
as a witness for a behavior of the one statechart that is
no behavior of the other statechart. The witness can
be presented to a user to facilitate finding the syntactic
statechart elements causing the presence of witnesses.
7 ABSTRACTION
Two statecharts may be equivalent on one level of ab-
straction but inequivalent on another abstraction level.
A statechart developer may be aware that two state-
charts differ on one level of abstraction. At the same
time, the developer could be interested in comparing
the statecharts on another abstraction level where they
might be equivalent. This is especially useful if the
developer wants to focus on comparing some aspects
of the statecharts but wants to abstract from others.
For example, a developer might be interested
in applying semantic differencing to two statecharts
while abstracting from calls of private methods in re-
actions. This corresponds to event hiding as intro-
duced in Section 7.1.
Similarly, at an early development stage, the argu-
ments passed to a method, which is called in a re-
action of a transition, might be unknown. In later
development stages, the arguments might be known.
As a consequence, the developer changes all events
that correspond to the method calls with unknown pa-
rameters to events where the arguments are all expli-
cated. This implies that the statechart where the ar-
guments are explicated is not equivalent to the state-
chart where the arguments are not explicated. The de-
veloper might want to abstract from the arguments to
check whether the two statecharts are equivalent pro-
vided that the method is called with the same argu-
ments. This corresponds to event matching as intro-
duced in Section 7.2. Combinations of event hiding
and matching methods are also possible.
7.1 Event Hiding
Two statecharts describing the behavior of the same
class may behave equally when observed from the
outside but may still have incomparable semantics.
For example, the statecharts may call different private
methods of their class but the same methods of other
classes. Sometimes, it is required to abstract from in-
ternal method calls to check whether statecharts have
the same externally visible behaviors. This can be
achieved by hiding:
Definition 7 (Hiding). Let SC = (I,O,S,T,S
0
) be
a statechart and let H ⊆ O be a set of output
events. Hiding the events of H in SC yields the
statechart SC ⇓ H = (I, O \ H, S,T
0
,S
0
) where T
0
=
{(src,trg,st, re ↓ H) | (src,trg,st,re) ∈ T }.
Thus, hiding events from a statechart effectively
removes them from the reactions of the statechart’s
transitions. An important property of the hiding op-
erator is that it strictly induces an abstraction with re-
spect to refinement: If one statechart is a refinement
of another statechart before hiding events, then the
statechart is still a refinement of the other statechart
after hiding the same events in both statecharts.
Theorem 2. Let SC = (I, O, S, T, S
0
) and SC
0
=
(I
0
,O
0
,S
0
,T
0
,S
0
0
) be two statecharts and let H ⊆ O
be a set of output events. If JSCK ⊆ JSC
0
K, then
JSC ⇓ HK ⊆ JSC
0
⇓ HK.
Proof. Let SC, SC
0
, and H be given as above. Assume
JSCK ⊆ JSC
0
K holds.
Let b ∈ JSC ⇓ HK be a behavior of the state-
chart SC ⇓ H. Then, there exists an execution e =
s
0
,t
1
,s
1
,...,s
n
∈ Ex(SC ⇓ H) such that beh(e) = b.
By definition of ⇓, we have that for all 0 < i ≤ n
there exists a transition t
0
i
= (src
i
,trg
i
,st
i
,re
i
) ∈ T
such that t
i
= (src
i
,trg
i
,st
i
,re
i
↓H). Since e is an
execution of SC ⇓ H and by definition of ⇓, it fol-
lows that e
0
= s
0
,t
0
1
,s
1
,...,s
n
∈ Ex(SC) is an exe-
cution of SC. Thus, beh(e
0
) ∈ JSCK is a behavior
of SC. By assumption JSCK ⊆ JSC
0
K, it holds that
beh(e
0
) ∈ JSC
0
K. Therefore, there exists an execu-
tion α = s
0
0
,u
1
,...,s
0
n
∈ Ex(SC
0
) such that beh(α) =
beh(e
0
). By definition of ⇓, we obtain that α
0
=
s
0
0
,u
0
1
,...,s
0
n
∈ Ex(SC
0
⇓ H) where r(u
0
i
) = r(u
i
)↓H and
st(u
0
i
) = st(u
i
) for all 0 < i ≤ n. Thus, beh(α
0
) ∈
JSC
0
⇓ HK. Observing that r(u
0
i
) = r(u
i
)↓H = re
i
↓H
and st(u
0
i
) = st(u
i
) = st
i
for all 0 < i ≤ n, we ob-
tain that b = (st
1
,re
1
↓H), ...,(st
n
,re
n
↓H) = beh(α
0
) ∈
JSC
0
⇓ HK.
Semantic Differencing of Statecharts for Object-oriented Systems
277

7.2 Event Matching
The events used in the transitions of one statechart
may contain more details than the events used in the
transitions of another statechart. For example, a state-
chart developed in an early development stage may
not contain the exact arguments that are passed to
each method. In this case, reactions in the statechart’s
transitions may include events that represent the name
of the method without providing details about its ar-
guments. These arguments may be specified in a later
development stage. As a consequence, the events in
the reactions are changed by explicating the details
about which arguments are passed to the method. A
developer might be interested in whether the changes
imply refinement when abstracting from the argu-
ments passed to the method. Then, we must abstract
from the method arguments by matching the events
including arguments to the events without arguments:
Definition 8 (Matching). Let SC = (I, O, S,T,S
0
) be
a statechart and let m : E → E be a function that
maps events to other events. Matching the events in
SC according to m yields the statechart SC ⊕ m =
(I
0
,O
0
,S,T
0
,S
0
) where
• I
0
= {m(i) | i ∈ I},
• O
0
= {m(o) | o ∈ O}, and
• T
0
= {(s,t, m(st),m(re)) | (s,t,st, re) ∈ T }.
Thus, matching replaces all occurrences of an
event in a statechart by the event that it is mapped
to by the matching function. Event matching induces
an abstraction in context of statechart refinement: If
a statechart refines another statechart before applying
a matching, then the statechart obtained from apply-
ing the matching to the former statechart refines the
statechart obtained from applying the same matching
to the latter statechart:
Theorem 3. Let SC = (I, O, S, T, S
0
) and SC
0
=
(I
0
,O
0
,S
0
,T
0
,S
0
0
) be two statecharts and let m : E → E
be a function that maps events to other events. If
JSCK ⊆ JSC
0
K, then JSC ⊕ mK ⊆ JSC
0
⊕ mK.
Proof. Let SC, SC
0
and m be given as above. As-
sume JSCK ⊆ JSC
0
K holds. Let b ∈ JSC ⊕mK be
a behavior of the statechart SC ⊕ m. Then, there
exists an execution e = s
0
,t
1
,s
1
,...,s
n
∈ Ex(SC ⊕
m) such that beh(e) = b. By definition of ⊕,
we have that for all 0 < i ≤ n there exists a
transition t
0
i
= (src
i
,trg
i
,st
i
,re
i
) ∈ T such that t
i
=
(src
i
,trg
i
,m(st
i
),m(re
i
)). Since e is an execu-
tion of SC ⊕ m and by definition of ⊕, it fol-
lows that e
0
= s
0
,t
0
1
,s
1
...,s
n
∈ Ex(SC) is an ex-
ecution of SC. Thus, beh(e
0
) ∈ JSCK is a be-
havior of SC. By assumption JSCK ⊆ JSC
0
K, it
holds that beh(e
0
) ∈ JSC
0
K. Therefore, there exist
an execution α = s
0
0
,u
1
,...,s
0
n
∈ Ex(SC
0
) such that
beh(α) = beh(e
0
). By definition of ⊕, we obtain
that α
0
= s
0
0
,u
0
1
,...s
0
n
∈ Ex(SC
0
⊕ m) where r(u
0
i
) =
m(r(u
i
)) and st(u
0
i
) = m(st(u
i
)) for all 0 < i ≤ n.
Thus, beh(α
0
) ∈ JSC
0
⊕ mK. Observing that r(u
0
i
) =
m(r(u
i
)) = m(r(t
0
i
)) = m(re
i
) = r(t
i
) and st(u
0
i
) =
m(st(u
i
)) = m(st(t
0
i
)) = m(st
i
) = st(t
i
) for all 0 < i ≤
n, we obtain that b = (st(t
1
),r(t
1
)),..., (st(t
n
),r(t
n
)) =
beh(α
0
) ∈ JSC
0
⊕ mK.
8 RELATED WORK AND
DISCUSSION
Related work divides into different statechart seman-
tics and behavior specifications as well as model
checking of statecharts.
Statecharts have originally been introduced
in (Harel, 1987). Since then, many statechart se-
mantics have been proposed. A survey (Eshuis,
2009) compares three established and commonly
used semantics: STATEMATE (Harel et al., 1988;
Harel and Naamad, 1996; Harel and Politi, 1998),
a fixpoint semantics based on (Pnueli and Shalev,
1991), and an UML semantics, which resembles the
behavior description for Rhapsody statecharts (Harel
and Gery, 1997; Harel and Kugler, 2004).
In general, the three semantics induce different
statechart behavior interpretations (Eshuis, 2009). All
the three semantics rely on the notion of step. A state-
chart performs a step in reaction to an occurring input
event. In all the three semantics, when an event oc-
curs, a statechart takes a transition, produces several
events and may again react to the produced events (ei-
ther immediately or delayed). This induces several
semantical problems (Rumpe, 2016). In contrast, a
UML/P statechart always executes exactly one tran-
sition in response to an occurring event. One tran-
sition cannot trigger another transition by definition.
This further eases comprehension and code genera-
tion (Rumpe, 2016). Another difference of the three
step semantics to the UML/P semantics is that the for-
mer permit feedback loops between communicating
statecharts, i.e., allow to model recursion. With this,
the three step semantics are more tailored towards
modeling implementation details, whereas UML/P
statecharts abstract from data states and are tailored
towards modeling high-level concepts.
In contrast to the statecharts supported by the
UML semantics (Eshuis, 2009), the UML/P seman-
tics also support underspecification: With UML/P
statecharts, it is possible to model multiple default
(initial) states and to model multiple transitions with
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
278

the same stimulus originating from the same state. In
contrast, statecharts supported by the UML seman-
tics are by definition not underspecified. The default
states of composite states are always unique. Fur-
ther, ambiguities in the transition relation are elim-
inated by using priorities (Eshuis, 2009). Model-
ing underspecified statecharts is especially useful in
early development stages where most of the system
requirements are unknown. When additional require-
ments become known in later development stages, un-
derspecification can be removed by changing the re-
spective statechart syntactically to restrict the possible
system behaviors accordingly. Then, semantic differ-
encing facilitates developers in detecting whether the
new statechart version is indeed a refinement of its
predecessor version.
A method to verify statecharts against computa-
tion tree logic formulas is introduced in (Zhao and
Krogh, 2006). The method is generic and thus appli-
cable to a general statechart class. The approach is
based on step-semantics and assumes that statecharts
exhibit bounded behaviors. Extending the approach
could yield semantic differencing methods for state-
charts with bounded behaviors under step semantics.
In (Maggiolo-Schettini et al., 1996), statecharts
are translated to labeled transition systems, which
represent their semantics. Based on the translation,
several equivalence relations for statecharts are de-
fined. The semantics used in the approach is a vari-
ant of the semantics described in (Pnueli and Shalev,
1991). Transfering the equivalence relations to our
approach is interesting for the development of further
abstraction methods.
Another approach (Meng et al., 2004) that con-
siders refinement of statecharts uses a coalgebraic se-
mantics inspired by the operational semantics intro-
duced in (Latella et al., 1999). The approach uses
another semantics than the one in this paper and does
not describe an automated method for checking re-
finement. However, the paper introduces eight refine-
ment rules that are correct by construction. Devel-
oping such rules for statecharts using this paper’s se-
mantics is interesting future work.
9 CONCLUSION
This paper formally defined a reduced abstract syntax
for UML/P statecharts modeling the behavior of ob-
jects in object-oriented systems. We further defined
a semantics for statecharts based on the behaviors in-
duced by taking transitions during statechart execu-
tions. Subsequently, this paper presented a semantics-
preserving translation from statecharts to NFAs. The
translation enables to reduce semantic differencing of
statecharts to language inclusion checking between
NFAs, which is fully automatable. Afterwards, this
paper defined event hiding and event matching as two
abstraction methods that enable to apply semantic dif-
ferencing to statecharts on different levels of abstrac-
tion. The result is a fully automated semantic differ-
encing method for a statechart variant that supports
underspecification. For future work, we plan to in-
vestigate the method’s performance. The method ul-
timately facilitates semantic evolution analysis for de-
velopers of statecharts specifying the behavior of ob-
jects in object-oriented systems.
REFERENCES
Cengarle, M. V., Gr
¨
onniger, H., and Rumpe, B. (2009).
Variability within Modeling Language Definitions. In
Conference on Model Driven Engineering Languages
and Systems (MODELS’09).
Eshuis, R. (2009). Reconciling statechart semantics. Sci-
ence of Computer Programming, 74(3).
Gr
¨
onniger, H. and Rumpe, B. (2011). Modeling Language
Variability. In Workshop on Modeling, Development
and Verification of Adaptive Systems.
Harel, D. (1987). Statecharts: A Visual Formalism for
Complex Systems. Science of Computer Program-
ming, 8.
Harel, D. and Gery, E. (1997). Executable Object Model-
ing with Statecharts. In International Conference on
Software Engineering.
Harel, D. and Kugler, H. (2004). The Rhapsody Seman-
tics of Statecharts (or, On the Executable Core of the
UML). In Integration of Software Specification Tech-
niques for Applications in Engineering.
Harel, D., Lachover, H., Naamad, A., Pnueli, A., Politi, M.,
Sherman, R., and Shtul-Trauring, a. (1988). State-
mate: A Working Environment for the Development
of Complex Reactive Systems. In Proceedings of the
10th International Conference on Software Engineer-
ing.
Harel, D. and Naamad, A. (1996). The STATEMATE Se-
mantics of Statecharts. ACM Transactions on Soft-
wware Engineering Methodology, 5(4).
Harel, D. and Politi, M. (1998). Modeling Reactive Systems
with Statecharts: The Statemate Approach. McGraw-
Hill, Inc.
Hopcroft, J. E., Motwani, R., and Ullman, J. D. (2006). In-
troduction to Automata Theory, Languages, and Com-
putation (3rd Edition). Addison-Wesley Longman
Publishing Co., Inc., Boston, MA, USA.
Latella, D., Majzik, I., and Massink, M. (1999). Towards
a Formal Operational Semantics of UML Statechart
Diagrams. In Formal Methods for Open Object-Based
Distributed Systems.
Semantic Differencing of Statecharts for Object-oriented Systems
279

Maggiolo-Schettini, A., Peron, A., and Tini, S. (1996).
Equivalences of Statecharts. In International Confer-
ence on Concurrency Theory.
Meng, S., Naixiao, Z., and Barbosa, L. S. (2004). On Se-
mantics and Refinement of UML Statecharts: A Coal-
gebraic View. In International Conference on Soft-
ware Engineering and Formal Methods.
Pnueli, A. and Shalev, M. (1991). What is in a Step: On
the Semantics of statecharts. In Theoretical Aspects
of Computer Software.
Rumpe, B. (2016). Modeling with UML: Language, Con-
cepts, Methods. Springer International.
Zhao, Q. and Krogh, B. H. (2006). Formal Verification of
Statecharts Using Finite-State Model Checkers. IEEE
Transactions on Control System Technology, 14(5).
MODELSWARD 2019 - 7th International Conference on Model-Driven Engineering and Software Development
280
