
Estimation of the Cardiac Pulse from Facial Video in Realistic
Conditions
Arvind Subramaniam
1
and K. Rajitha
2
1
Department of Electrical and Electronics Engineering, BITS PILANI Hyderabad Campus, Telangana, India
2
Department of Civil Engineering, BITS PILANI Hyderabad Campus, Telangana, India
Keywords: Heart Rate, Faster RCNN, Recursive Least Square Filtering, KLT Feature Tracking, Feature Point Recovery,
Independent Component Analysis.
Abstract: Remote detection of the cardiac pulse has a number of applications in fields of sports and medicine, and can
be used to determine an individual’s physiological state. Over the years, several papers have proposed a
number of approaches to extract heart rate (HR) using video imaging. However, all these approaches have
employed the Viola-Jones algorithm for face detection. Additionally, these methods usually require the
subject to be stationary and do not take illumination changes into account. The present research proposes a
novel framework that employs Faster RCNNs (Region-based Convolutional Neural Networks) for face
detection, followed by face tracking using the Kanade-Lukas-Tomasi (KLT) algorithm. In addition, the
present framework recovers the feature points which are lost during extreme head movements of the subject.
Our method is robust to extreme motion interferences (head movements) and utilizes Recursive Least Square
(RLS) adaptive filtering methods to tackle interferences caused by illumination variations. The accuracy of
the model has been tested based on a movie evaluation scenario and the accuracy was estimated on a public
database MAHNOB-HCI. The output of the performance measure showed that the present model outperforms
previously proposed methods.
1 INTRODUCTION
The measurement of physiological parameters such
as blood pressure, heart rate (HR) and
electrocardiogram (ECG) signals have been widely
utilized in medical diagnosis. The determination of
heart rate is a critical task which is used to indicate
the overall health of an individual. Employing
conventional techniques to measure HR such as
electrocardiography or optical sensors which
maintain physical contact with the subject can be
uncomfortable, since the pressure can become
inconvenient over time. Fortunately, previous papers
have demonstrated that it is possible to extract HR by
using the facial video of the individual (Verkruysse et
al. 2008, Poh et al. 2010).
In 2007, Garbey et al. proposed a novel method to
measure the cardiac pulse by analyzing the thermal
signals transmitted by the major blood vessels present
near the surface of the skin (Garbey et al. 2007). The
change in temperature occurs due to the variation in
the blood flow. Subsequent papers have overcome
this drawback by focusing on measuring subtle
changes in head motions as a result of the person’s
heart rate (Cennini et al. 2010, Balakrishnan et al.
2013). These oscillations are a direct result of the
Newtonian reaction of the head to the influx of blood
at every heartbeat. One chief drawback of this
approach is that it typically requires the user to be
stationary throughout the video. This is not practical
in a realistic scenario, since the user’s movements
will include both external motion like head tilt as well
as internal motions such as smiling and blinking.
There have been several papers over the years which
have solved this problem by concentrating on small
variations in skin color with HR (Poh et al. 2011,
Kwon et al. 2012, Yu et al. 2013, Mohd et al. 2015,
Moreno et al. 2015). After performing face detection,
they have identified a region of interest (ROI)
constituting roughly 60% of the face and calculated
the mean pixel value of each colour component
(RGB) of the ROI for each frame of the video. Next,
Independent Component Analysis (ICA) was
employed to obtain the corresponding
plethysmographic signals from the RGB traces.
Finally, they applied FFT to transfer these signals into
Subramaniam, A. and Rajitha, K.
Estimation of the Cardiac Pulse from Facial Video in Realistic Conditions.
DOI: 10.5220/0007367801450153
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 145-153
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
145
the frequency domain and acquired the frequency of
the heartbeat. The output showed that the
plethysmographic signal corresponding to the green
channel has the maximum power spectral density
among the three colour channels.
Although these models are significantly better than
their motion-based counterparts, they do not consider
real world challenges such as illumination variations
into account.
In 2016, Tulyakov et al. introduced a novel
optimization framework that estimates HR by using
local estimates from multiple regions in the face, by
using a chrominance-based method to relax motion
constraints (Tulyakov et al. 2016).
Zhang et al. employed a six channel ICA algorithm to
simultaneously detect HR and blink (Zhang et al.
2017). Although the algorithm is marginally tolerant
to motion artifacts, they have not concretely focused
on removing illumination artifacts. As a result, on a
challenging dataset comprising of considerable
motion as well as illumination artifacts, the accuracy
of their method diminishes.
Furthermore, even though a few papers consider
illumination variations (Li et al. 2014, Lam and Kuno
2015), it is important to note that all of the afore-
mentioned models employ the Viola-Jones algorithm
for face detection. To the best of our knowledge, no
framework has used a different algorithm for face
detection.
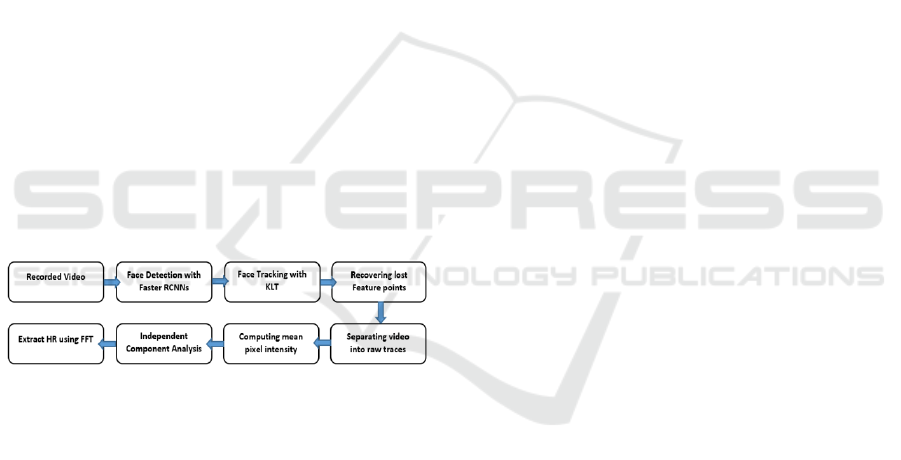
Figure 1: Stages of the proposed approach. The feature
point recovery system is triggered when the number of
feature points at any given instant falls below a pre-defined
threshold value.
The present research focuses on the following
objectives:
1. To build a feature point recovery system to get
back feature points lost during extreme head
movements. The system monitors the total
number of feature points at a particular instant
reapplies face detection and tracking to obtain
lost points.
2. To apply Recursive Least Square (RLS) based
adaptive filtering methods to tackle illumination
interferences in the video.
In addition, we have employed Faster RCNNs, as
opposed to the Viola-Jones face detection algorithm
used by previous papers. The advantages of
employing Faster RCNNs have been illustrated in
Section 3. Although face detection and tracking do not
form the crux of this work, we have also optimized this
component of the framework, rather than employing
the Viola-Jones face detection algorithm.
The rest of the paper is organized as follows: In Section
3, we employ Faster RCNNs to perform face detection
and examine the advantages of using Faster RCNNs
over the widely used Viola-Jones algorithm. Next, we
utilize KLT algorithm to track features of the face and
also introduce a feature point recovery system, thus
providing greater robustness to motion artifacts.
Section 4 introduces a novel approach to rectify
changes in illumination which often compromise the
accuracy of the HR measurement framework. Section
5 deals with extracting the heart rate using ICA and
band limits the frequency in the desired range (0.60 –
4 Hz) with the help of temporal filters. In Section 6, we
devise a movie evaluation scenario to verify the
accuracy of our framework and determine the
percentage error after comparison with a standard heart
beat sensor. Additionally, we compare our models with
previously proposed models and show that our
framework significantly outperforms previous models.
Finally, Section 7 draws conclusions.
2 DATASETS
In this study, we have used the WIDER face database
to train our Faster RCNN model (Yang et al. 2016).
The WIDER dataset consists of 12,880 images
comprising over 150,000 faces as part of the training
set. MATLAB 2015a was used under Windows 10
operating system for the entire implementation of the
project.
We have employed two datasets to implement and
evaluate our framework. The first dataset consists of 18
videos (9 male and 9 female) recorded by ourselves
using a standard laptop webcam, with considerable
motion interferences but no illumination variations.
Each video has a frame rate of 30 frames per second,
pixel resolution of 1280 x 720 and a duration of
approximately 50-60 seconds. The subjects ranged
from 20-55 years of age and varied in complexion.
The second dataset is the MAHNOB-HCI
database (Soleymani et al. 2012), a publically available
database comprising 527 colour videos of 27 subjects
(12 males and 15 females). The videos have a
resolution of 780 x 580 pixels recorded at 61 FPS.
However, we were able to ultimately test our
framework on 487 videos since the rest of the other
videos did not have corresponding ECG readings
when we downloaded the dataset.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
146

3 FACE DETECTION AND
TRACKING
Faster RCNNs, proposed by Ren et al. have proven to
be over 200x faster than conventional neural
networks, in carrying out tasks such as object
detection (Ren et al. 2017). While previous papers
have used the Viola-Jones algorithm for face
detection, we have deviated from this approach by
employing Faster RCNNs and demonstrate that our
face detection framework achieves superior results.
Faster RCNNs primarily performs face detection in
two steps. The first step consists of a fully
convolutional neural network, known as the Region
Proposal Network (RPN), to extract the features of an
image to generate object proposals and feed it to the
subsequent module. Object/Region proposals are
made based on the probability of detecting an object
in a particular region. In the second module, these
region proposals are refined and classified
accordingly using ROI pooling. Fig. 2 compares the
face detection results obtained from our Faster RCNN
model with those obtained from the Viola-Jones face
detection algorithm.
Firstly, the Faster RCNN model identifies the face
even when a portion of the face is hidden from the
camera. For instance, our model is able to detect the
face without requiring the full frontal profile of the
subject, as opposed to the Viola-Jones algorithm,
which has primarily been trained and tested on frontal
face datasets. Secondly, as illustrated in Fig. 2, it is
possible for the Viola-Jones algorithm to falsely
detect a face (false positives) if the degree of contrast
of the background is similar to the degree of contrast
in the person’s face. We have used our own dataset to
compare the two face detection methods.
Next, the KLT feature tracking algorithm is applied
to extract feature points and track the face of the
subject. This ensures that our framework is able to
consistently detect the face and extract HR even when
there is non-rigid head movement. After finalizing the
ROI inside the face, the KLT algorithm detects
feature points inside the ROI. Since KLT can be
executed quickly, we used the feature points to obtain
the ROI in the next frame. The feature points of the
next frame are given by:
, where
is the transformation matrix. Next, we apply the
transformation matrix to compute the boundary
points of the ROI in the next frame:
. Since the feature points are employed to
compute the coordinates of the ROI in the next frame,
the loss of feature points will invariably compromise
the overall accuracy of the framework.
Figure 2: The results after performing face detection (from
left): i) The Faster RCNN framework is able to detect faces
without requiring the full frontal face. This makes HR
extraction more robust to motion artifacts; ii) and iii) are the
ROIs obtained after applying Viola-Jones and Faster
RCNN respectively, on the same video. There are multiple
ROIs detected in (ii) which can lead to erroneous results.
This has been solved in (iii), as shown above.
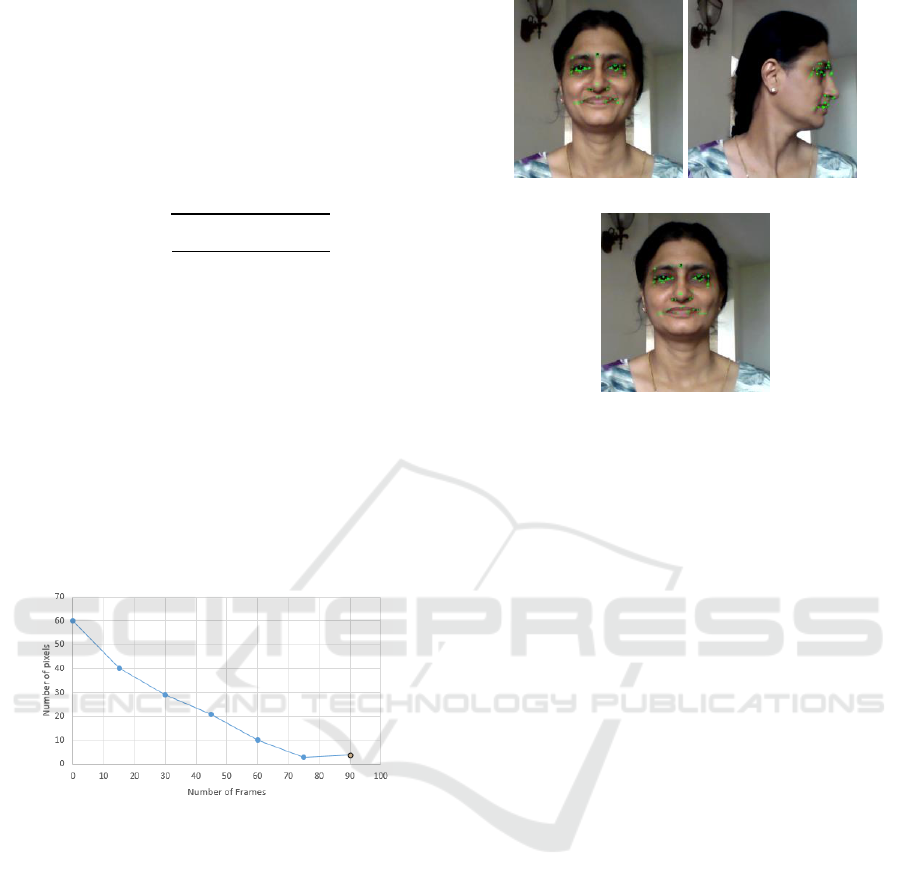
Figure 3: After applying the Face detection and KLT
algorithm on the MAHNOB-HCI database.
3.1 Recovering Lost Feature Tracking
Points
An important feature of our framework is the
recovery of the feature tracking points which are lost
during extreme head movements. In case of large
head movements, it is possible for parts of the
subject’s face to get obscured from the camera. As a
result, this may lead to the loss of a large number of
feature points.
In order to recover the feature points, we monitor
the total number of features at any given instant and
compare it with a threshold value (
). In case the
number of tracking points falls below the threshold
value, the Faster RCNN and the KLT algorithm are
reapplied, exactly 15 frames after the frame where the
failure had occurred. We have taken the threshold
value to be 60% of the total number of feature points.
However, monitoring the total number of feature
points is not a sufficient requirement. Although
Estimation of the Cardiac Pulse from Facial Video in Realistic Conditions
147
reapplying KLT would produce the same number of
feature points as before, it would not be possible to
recover the feature points corresponding to the
obscured portion of the face, since the new feature
points would have different locations. Hence, we
compute the root mean square error (RMSE) of the
new feature point centroid () relative to the old
centroid () using
(1)
where N denotes the number of features points at a
given frame and (t) denotes the RMSE. Faster
RCNN and KLT are applied once every 15 frames
(0.5 seconds) until reaches a minima. Fig. 5
illustrates the choice of RMSE and the corresponding
frame at which the feature points are recovered. Face
detection and tracking are not re-implemented
beyond this frame, as shown in Fig.4. Since Faster
RCNNs take less than 0.25 seconds per image for face
detection, our framework can tackle extreme head
rotations without compromising the overall speed of
the model.
Figure 4: The RMSE represents the deviation of the new
centroid , from the old centroid and is given by
the difference in the number of pixels between and
. The recovery of feature points terminates after the
minima is achieved – in this case, 180 frames (3 seconds)
after tracking failure.
As shown in Figure 5, after recovering lost feature
points, it is possible to consistently track the subject’s
face and obtain the ROI despite considerable head
movement. We found that the plethysmographic
signal corresponding to the green channel is the most
prominent among the three colour channels. Hence,
we have primarily utilized the green channel for HR
measurement and illustration purposes.
Figure 5: Face tracking using the KLT algorithm and
recovery of tracking points in case of tracking failure.
Despite getting obscured from the camera, the features in
left part of the face are recovered by applying Faster RCNN
and the KLT algorithm again, starting 15 frames after the
frame of detection failure. From left to right, the frame
numbers are 21, 150 and 240 (taken from our dataset).
4 RECTIFYING ILLUMINATION
INTERFERENCES
The mean pixel intensity computed from the ROI
in each frame primarily consists of two
signals. The first signal is a result of variations in
blood flow caused by the cardiac pulse; the second
signal is unwanted illumination variations that occur
during the recording (Parra 2007). It is reasonable to
assume that these two interferences are additive:
,
(2)
where S(t) denotes the original green channel
variations caused by the cardiac pulse, and N(t)
denotes the green channel variations caused by
illumination variation as shown in Fig. 6.
Our objective is to eliminate the noise signal N(t)
and obtain the best possible approximation of the
signal S(t). Since the lighting sources are practically
the same for the ROI and the background, we assume
that the associated illumination changes for the ROI
and the background would be the same as well (Basri
and Jacobs 2003). Hence, we have employed the
mean channel intensity of the background
to
remove the noise signal N(t).
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
148

We have assumed N(t) to vary linearly with
:
.
(3)
Figure 6: The top curve shows the normalized mean green
pixel intensity of the ROI before rectifying illumination
interferences. The curve below is a plot of the normalized
mean green channel intensity of the background. The spike
in the intensity is a result of illumination interference.
However, since we only have an approximation of the
noise signal N(t), the illumination rectified signal
will invariably be a close approximation of
S(t), and is given by
,
(4)
where
(5)
is the deviation of the illumination rectified signal
from S(t). In order to compute the best possible
approximation of
, we have utilized the
Recursive Least Squares (RLS) adaptive filter to
calculate the ideal value of K that minimizes the error.
The RLS adaptive filter is an algorithm that
recursively computes the filter coefficients that
minimize a linear cost function related to the input
signal.
Let be the estimated filter weight for each point
time point . After initializing the weights, the RLS
filter updates the filter weights as
(6)
Here, is the autocorrelation matrix given by
,
(7)
where
is the transpose of
and is a
positive constant smaller than 1. The RLS filter will
continue to run its iterations until K(t) converges to a
suitable value that minimizes the error/deviation
.
We have applied the Local Region Based Active
Contour (LRBAC) method to segment the
background region of each frame (Lankton and
Tannenbaum 2008). Since LRBAC is a region-based
approach, it is insensitive to image noise, as opposed
to edge-based methods such as the Distance
Regularized Level Set Evolution (DRLSE) method.
The mean green pixel intensity of the background is
computed for every frame and is used to acquire the
illumination rectified signal
as shown in
eqns. 4 and 5.
Figure 7: The curve on the left is a plot of the normalized
illumination rectified signal while the curve on the right is
the ground truth normalized mean green pixel intensity. The
ground truth plot is obtained from the recording of the same
scene in conditions without any illumination variations.
It can be seen that the illumination rectified signal that
we have obtained is almost identical to the ground
truth signal.
5 RESULTS
The mean RGB values in the ROI are calculated for
each frame of the video. The ROI is then separated
into its three constituent RGB channels and the mean
value of each raw trace is computed. Each raw trace
is then normalized in order to have zero mean and unit
standard deviation. This helps us to achieve results
Estimation of the Cardiac Pulse from Facial Video in Realistic Conditions
149

which are independent of the complexion of the subject
since all three traces will now have the same statistical
metrics.
We used FastICA 2.5 on Matlab 2015a to obtain the
three source signals corresponding to each normalized
traces. We found that the plethysmographic (PG)
signal corresponding to the green trace has the most
prominent peak in the frequency spectrum. Let the PG
signals corresponding to the red, green and blue traces
be
respectively. For
,
(8)
where A is a 3x3 matrix. In order to find each source
signal
, ICA finds an approximation of A
-1
that
minimizes the gaussianity of each source signal.This
ensures that the obtained source signals are statistically
independent (Breuer and Major 1983).
Finally, The power spectra of the PG signals is
obtained in order to determine the most prominent
frequency component. Next, several temporal filters
are applied to exclude frequencies outside the desired
range. Since, the normal heart rate ranges from 40 bpm
to 240 bpm, the desired frequency range was set to [0.6,
4] Hz. Finally, the heart rate of the video is calculated
as
bpm. The prominent peak in the
power spectrum (1.27 Hz) corresponds to 76 bpm.
Figure 8: The power spectra displaying the source signals
corresponding to the red, green and blue components of the
video. The red, green and blue plots correspond to
respectively.
6 PERFORMANCE ANALYSIS
OF THE PROPOSED
FRAMEWORK
6.1 Testing the Framework
We have devised an experiment to evaluate the
robustness and accuracy of our framework in realistic
conditions. We record the facial video of an individual
for approximately 10 minutes while the individual is
watching a horror movie. The settings we have
installed are the same as those used for recording all
previous videos (mentioned in Section 1). We have
also monitored the heart rate by attaching a heart rate
sensor to the user in order to compare our results with
the ground truth results and measure the percentage
error of our framework.
From the figure, it can be observed that the HR of the
subject changes with time depending upon the scene
that the subject is watching. To make it more
interesting, we have chosen scenes which are likely to
elicit a higher HR from the subject. It is clear from the
plot that the HR measured by our framework is in
agreement with the ground truth data, barring slight
differences. The HR computed has a mean error
percentage of
Figure 9: The heart rate of the subject while watching the
horror movie ‘The Conjuring’. Specific scenes from the
movie have been chosen in order to obtain a higher HR and
test the accuracy of our framework.
6.2 Datasets for Error Analysis
In order to ascertain the efficiency of our method, we
implement our framework as well as previously
proposed methods on two different sets of videos we
have collected, since previous papers have not made
their datasets public. The first dataset contains 18
videos having an average duration of 50-70 seconds,
collected from a group of 18 subjects (9 male and 9
female). We have recorded videos with considerably
high motion artifacts (head movements > 60 degrees),
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
150

but very few illumination interferences. For the
second set of videos, we have used the MAHNOB-
HCI database (Soleymani et al. 2012), in which we
tested our framework on a set of 487 colour videos of
27 subjects (12 males and 15 females). The videos
have a resolution of 780 x 580 pixels recorded at 61
FPS. As a result, our implementation of Li2014 and
SAMC has a different result than the original papers,
since both SAMC2016 and Li2014 were tested on all
527 videos of the MAHNOB-HCI dataset.
6.3 Determination of Mean Error and
RMSE
A Polar H10 HR sensor is used to monitor and
provide the ground truth HR. We have chosen four
colour-based methods (Poh2011 (Poh et al. 2011),
Kwon2012 (Kwon et al. 2012), Li2014 (Li et al.
2014) and Zhang2017) and one motion-based
method (Balakrishnan2013 (Balakrishnan et al.
2013)) for comparison. Since every paper had
different statistical measures to evaluate the
performance of their model, we have employed four
widely used metrics to measure the performance of
each framework: the mean absolute error (
), the
root mean-square error (RMSE), percentage of
Absolute error less than 5 bpm and the correlation
coefficient r.
The results have been tabulated below. Table 1
illustrates the results that have been obtained on our
dataset, which consists of challenging facial videos
recorded with considerable motion artifacts, but no
illumination variations.
Table 1: Performance of previously proposed frameworks
on our database (extreme motion interferences without
illumination variations).
Framework
RMSE(%)
% Absolute
Error<5bpm
r
Poh2011
9.1
15.9
56.4
0.39*
Kwon2012
8.8
15.6
46.1
0.15
Bala2013
11.5
18.2
33.2
0.06
Li2014
7.2
11.5
71.3
0.78*
Zhang2017
7.6
11.1
72.1
0.68*
SAMC2016
4.7
9.2
76.2
0.85*
Ours
3.4
6.4
77.9
0.89*
* - Indicates that the correlation is significant at p = 0.01
From Table 1, it can be seen that under ideal
illumination conditions, all of the proposed methods
perform satisfactorily. The higher error rate in
Balakrishnan2013 (here, Bala2013), a motion-based
method, arises due to large head movements in the
video. We have included extreme motion variations
such as head rotations higher than 60 degrees. Since
our framework is able to recover feature tracking
points which are lost during the subject’s head
movement, our model outperforms other recently
proposed models and is robust to head rotations of
more than 60 degrees. As a result, our mean
percentage error and RMSE are lower than Li2014
and SAMC2016.
Table 2: Performance on the MAHNOB-HCI dataset
(consists of motion as well as illumination interferences).
Framework
RMSE(%)
% Absolute
Error<5bpm
r
Poh2011
13.5
21.1
46.2
0.32*
Kwon2012
24.1
25.5
41.2
0.21
Bala2013
16.1
22.9
39.1
0.26
Li2014
7.8
15
68.1
0.72*
Zhang2017
8.7
15.7
63.2
0.65*
SAMC2016
5.1
7.2
73.2
0.75*
Ours
(i)+(iv)
28.7
32.2
33.8
0.41
Ours
(i)+(ii)+(iii)
+(iv)
4.7
6.8
78.3
0.79*
* - Indicates that the correlation is significant at p = 0.01
Table 2 shows the results of implementing the above
models on the MAHNOB-HCI dataset.
Here, (i), (ii), (ii) and (iv) represent Faster
RCNN+feature tracking, recovery of feature tracking
points, illumination rectification and temporal
filtering respectively.
As it can be seen, our method provides the best
results out of all the afore-mentioned algorithms. Our
framework significantly outperforms Poh2011,
Kwon2012 and Balakrishnan2013 since these models
do not account for changes in illumination. Our model
also outperforms Li2014, SAMC2016 and
Zhang2017. This is due to the recovery of feature
tracking points in our model, as a result of which the
HR is accurately measured despite large head
rotations by the subject. Moreover, Zhang2017 does
not account for illumination variations as a result of
which the accuracy is diminished on the MAHNOB-
HCI dataset.
7 CONCLUSIONS
Over the years, there have been several methods to
Estimation of the Cardiac Pulse from Facial Video in Realistic Conditions
151

extract HR from facial video such as motion based
methods, color-based methods as well as approaches
that have employed thermal imaging techniques. To
the best of our knowledge, all of the previously
proposed approaches have employed the Viola-Jones
algorithm for face detection. We have deviated from
this approach and employed Faster RCNNs for face
detection. The Faster RCNN employed in the present
study was able to detect faces without requiring the full
frontal profile of the face, thus making it more robust.
Secondly, depending upon nature of the background,
the Viola-Jones algorithm may detect multiple ROIs,
which may lead to confusion. This is not the case with
our face detection algorithm, since it is independent of
the background in the video.
An important feature of our framework is the ability to
recover feature points which may have been lost during
extreme head rotations. This makes our model robust
to extreme motion artifacts and is able to measure HR
even the subject performs a complete rotation (360
degrees). Next, while some of these papers have
reduced the problem of head movements, all of them
have a degradation in performance in the presence of
illumination interferences. In our framework, we have
accounted for this artifact by using RLS adaptive
filtering methods and the local region-based active
contour method (LRBAC) to segment the background
and remove the noise signal in the video arising from
changes in illumination.
We also performed an experiment where we monitored
a subject while watching specific scenes of a horror
movie for a period of 5-10 minutes, and extract the HR
of the subject. The average HR of approximately every
20s is plotted and compared with the ground truth data.
Upon comparison with the polar H10 HR monitoring
sensor, we found that our framework achieved a mean
error percentage of 1.71%.
Moreover, we also implemented previously proposed
approaches on our database of 18 videos and found that
our framework outperformed the previous four
methods and attained a root mean-square error of
8.28% on the MAHNOB-HCI database.
One principle source of error might be the difference
in sampling rates of the HR sensor and our webcam.
While our webcam had a sampling rate close to 30 Hz,
the H10 polar HR sensor had a higher sampling rate of
256 Hz. Also, in case of extremely low illumination
where the face is not visible, it would be useful to
combine motion and region-based methods to better
solve motion and illumination interferences.
A direction for future research would be to focus on the
integration of motion as well as colour-based methods
to estimate HR. The complementary nature of these
methods would enable a more robust approach to
simultaneously tackle motion and illumination artifacts
in the video.
REFERENCES
Balakrishnan, G., Durand, F., and Guttag, J., 2013.
Detecting pulse from head motions in video. In:
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition. 3430–
3437.
Basri, R. and Jacobs, D.W., 2003. Lambertian reflectance
and linear subspaces. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 25 (2), 218–233.
Breuer, P. and Major, P., 1983. Central limit theorems for
non-linear functionals of Gaussian fields. Journal of
Multivariate Analysis, 13 (3), 425–441.
Cennini, G., Arguel, J., Akşit, K., and van Leest, A., 2010.
Heart rate monitoring via remote
photoplethysmography with motion artifacts reduction.
Optics Express, 18 (5), 4867.
Garbey, M., Sun, N., Merla, A., and Pavlidis, I., 2007.
Contact-free measurement of cardiac pulse based on the
analysis of thermal imagery. IEEE Transactions on
Biomedical Engineering, 54 (8), 1418–1426.
Kwon, S., Kim, H., and Park, K.S., 2012. Validation of
heart rate extraction using video imaging on a built-in
camera system of a smartphone. In: Proceedings of the
Annual International Conference of the IEEE
Engineering in Medicine and Biology Society, EMBS.
2174–2177.
Lam, A. and Kuno, Y., 2015. Robust heart rate
measurement from video using select random patches.
In: Proceedings of the IEEE International Conference
on Computer Vision. 3640–3648.
Lankton, S. and Tannenbaum, A., 2008. Localizing region-
based active contours. IEEE Transactions on Image
Processing, 17 (11), 2029–2039.
Li, X., Chen, J., Zhao, G., and Pietikäinen, M., 2014.
Remote heart rate measurement from face videos under
realistic situations. In: Proceedings of the IEEE
Computer Society Conference on Computer Vision and
Pattern Recognition. 4264–4271.
Mohd, M.N.H., Kashima, M., Sato, K., and Watanabe, M.,
2015. A non-invasive facial visual-infrared stereo
vision based measurement as an alternative for
physiological measurement. In: Lecture Notes in
Computer Science (including subseries Lecture Notes
in Artificial Intelligence and Lecture Notes in
Bioinformatics). 684–697.
Moreno, J., Ramos-Castro, J., Movellan, J., Parrado, E.,
Rodas, G., and Capdevila, L., 2015. Facial video-based
photoplethysmography to detect HRV at rest.
International Journal of Sports Medicine, 36 (6), 474–
480.
Parra, E.J., 2007. Human pigmentation variation: evolution,
genetic basis, and implications for public health.
American journal of physical anthropology.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
152

Poh, M.-Z., McDuff, D.J., and Picard, R.W., 2010. Non-
contact, automated cardiac pulse measurements using
video imaging and blind source separation. Optics
Express, 18 (10), 10762.
Poh, M.Z., McDuff, D.J., and Picard, R.W., 2011.
Advancements in noncontact, multiparameter
physiological measurements using a webcam. IEEE
Transactions on Biomedical Engineering, 58 (1), 7–11.
Ren, S., He, K., Girshick, R., and Sun, J., 2017. Faster R-
CNN: Towards Real-Time Object Detection with. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 39 (6), 1137–1149.
Soleymani, M., Lichtenauer, J., Pun, T., and Pantic, M.,
2012. A multimodal database for affect recognition and
implicit tagging. IEEE Transactions on Affective
Computing, 3 (1), 42–55.
Tulyakov, S., Alameda-Pineda, X., Ricci, E., Yin, L., Cohn,
J.F., and Sebe, N., 2016. Self-Adaptive Matrix
Completion for Heart Rate Estimation from Face
Videos under Realistic Conditions. In: 2016 IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR).
Verkruysse, W., Svaasand, L.O., and Nelson, J.S., 2008.
Remote plethysmographic imaging using ambient light.
Optics Express, 16 (26), 21434.
Yang, S., Luo, P., Loy, C.C., and Tang, X., 2016. WIDER
FACE: A face detection benchmark. In: Proceedings of
the IEEE Computer Society Conference on Computer
Vision and Pattern Recognition. 5525–5533.
Yu, Y.P., Kwan, B.H., Lim, C.L., Wong, S.L., and
Raveendran, P., 2013. Video-based heart rate
measurement using short-time Fourier transform. In:
2013 International Symposium on Intelligent Signal
Processing and Communication Systems. 704–707.
Zhang, C., Wu, X., Zhang, L., He, X., and Lv, Z., 2017.
Simultaneous detection of blink and heart rate using
multi-channel ICA from smart phone videos.
Biomedical Signal Processing and Control, 33, 189–
200.
Estimation of the Cardiac Pulse from Facial Video in Realistic Conditions
153
