
A Hybrid Multi-agent Architecture for Modeling in MATSim with an
Alternative Scoring Strategy
Youssef Inedjaren
1
, Besma Zeddini
1
, Mohamed Maachaoui
1
and Jean-Pierre Barbot
2
1
Laboratoire Quartz, COMUE Paris Seine, EISTI, France
2
Laboratoire Quartz, COMUE Paris Seine, ENSEA, France
Keywords:
Autonomous Vehicles, Agent, Multi-agent System, Micro-simulation, MATSim, Scoring, OTFVis (On The
Fly Visualizer).
Abstract:
The development of new information and communication technologies is contributing to the emergence of
a new generation of real-time services in various fields of application. In the area of intelligent transport
systems, these new services also include connected vehicles that enable vehicles to collect and disseminate
information, safety alerts and make driving smarter and more environmentally friendly. More and more, they
concern power-assisted or fully autonomous vehicles. In this paper we propose an architecture of agents and
we project it on a multi-agent transport simulator (MATSim). In order to improve the performance of the
DriverAgent in the simulation an alternative approach to score the DriverAgent plans is proposed. The results
show that the proposed scoring function is able to ensure that agents improve their plans at each iteration
performing on the same if not better level than the current scoring function.
1 INTRODUCTION
The simulation of road traffic is booming nowadays.
It is increasingly used in the context of traffic manage-
ment. It is proving to be an effective tool for analyzing
a large number of problems that cannot be solved by
analytical methods. It is important to note that the first
simulation techniques were developed in the early
50’s in the transport sector. But nowadays, simula-
tion is considered a necessary step for people wor-
king on road development projects or flow control.
The inability of road networks to meet the demands
of an exponential number of vehicles is the main rea-
son for problems of congestion, pollution, etc. These
are a big problem for the road transport system. Yet
this remains the most used means of transportation
for citizens. The problems of road transport are due
to the inadequate demand for the number of vehicles
and the saturation capacity of the road, this means
the imbalance between the demand and the offer of
users. To mitigate these problems, the solution would
be to make the road smart, using vehicle-vehicle and
vehicle-infrastructure communication. Given these
facts, many researchers have embarked on work to
find solutions to solve this problems. A system will
be called multi-agent if there is more than one agent
and these agents interact in the same environment. In
general, these agents will be able to cooperate, ne-
gotiate or compete, depending on the purpose of the
system to be attained and the interests of each agent.
There are three types of Multi-agent simulations: The
macro-simulation approach involves modelling gene-
ral aspects of the system such as, density, the average
speed of vehicles on the road, etc. A meso-simulation
is an intermediate level between the micro and the
macro. In the case of road traffic, global traffic can
be considered as a collective behavior of the different
vehicles. Finally, a micro-simulation approach allows
to model each of the vehicles with specific charac-
teristics such as the width of the vehicle, the maxi-
mum speed allowed, etc. From these three levels of
simulation that we have just presented, we retain the
microscopic approach, because it adapts better to the
concept of multi-agent. For the simulation, we use
the traffic simulator MATSim (Multi-agent Transport
Simulation) (Horni et al., 2016) that is a framework
for agent-based micro-simulations, and its main role
is to optimize the travel demand in large scenarios.
The work presented in this paper focuses on propo-
sing a hybrid architecture with different agents with
different roles each, then we try to improve the per-
formance of the DriverAgent using a methodology for
scoring that we injected in MATSim for this purpose.
The paper is organized as follows: Firstly, we pro-
186
Inedjaren, Y., Zeddini, B., Maachaoui, M. and Barbot, J.
A Hybrid Multi-agent Architecture for Modeling in MATSim with an Alternative Scoring Strategy.
DOI: 10.5220/0007385401860193
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 186-193
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

posed a global architecture with three different types
of agents (DriverAgent, RSU (Roadside Unit) Agent,
and TrafficControlAgent), after that we propose a mo-
del of the DriverAgent with custom modules. Se-
condly, we discuss a comparative study between our
approach (Hybrid) and the literature related to agents
coordination using centralized and decentralized ap-
proaches respectively. In the second part of the paper,
we explain the current scoring methodology in MAT-
Sim and the proposed scoring function is presented.
Finally, a comparison between the results of DriverA-
gent’s plans improvements, using the current and the
proposed scoring function is outlined (Results).
2 RELATED WORK
As the document is divided in two important sections,
the first part is about the different types of agents (Fer-
ber and Weiss, 1999), but the main idea is to use these
agents to propose a simple architecture of agents. The
second section is based on the use of the Multi-agent
traffic simulator MATSim (Horni et al., 2016), to im-
plement this architecture and to execute the simula-
tion with our experimental needs. We organize our
discussion around three topics: Global Architecture,
Coordination approach and scoring module in MAT-
Sim.
2.1 Global Architecture
In this section we focus our discussion on the global
architectures that are proposed to facilitate interacti-
ons (vehicle-to-vehicle or vehicle-to-infrastructure),
and here we have the notion of cooperative systems.
Below some works that proposed different architectu-
res of cooperative systems: In (Wenjie et al., 2005a),
the authors proposed a network of wireless sensors of
three types of nodes: vehicles, electromagnetic sen-
sors, and intersection controllers. Road sensors con-
tinuously broadcast information containing their po-
sition: vehicles receiving data from more than three
different sensors will then be able to calculate their
position by triangularization and send the result and
their speed to the controller, who will be able to take
decisions on changing traffic lights on intersection
(V2I vehicle to infrastructure). Based on the previ-
ous work, in (Wenjie et al., 2005b) the authors even
proposed the following prototype: The WITS (Wi-
reless Sensor Network for Intelligent Transportation
Systems) system is used for information gathering
and data transfer. There are 3 types of WITS nodes
installed in this system: the vehicle unit on the indi-
vidual vehicle; the roadside unit along both sides of a
road; and the intersection unit on the intersection. The
vehicle unit measures vehicle parameters and trans-
fers them to roadside units. The road unit collects
vehicle information and transfers it to the intersection
unit. The intersection unit receives and analyses the
information from other units and forwards it to the po-
licy subsystem (calculates an appropriate scheme ba-
sed on the predefined optimization target). In (Wie-
ring, 2000) the authors proposed learning methods
that allow vehicles to move by minimizing the wai-
ting time at intersections by exchanging information
with the traffic lights. Concerning our architecture,
we built it on the basis of cooperative systems, dra-
wing on the researches already presented, by imple-
menting roadside units at intersections with a central
controller to manage the network.
2.2 Coordination Approaches
Several research works have focused on centralized
or decentralized approaches focusing on the coordi-
nation of autonomous vehicles. In this section, we
consider an approach as centralized if at least one sy-
stem decision is globally decided for all vehicles by
a single central controller. For decentralized approa-
ches, vehicles are treated as autonomous agents that
try to maximize their cooperative capacity. In this
context, each agent driver receives information from
other driver agents and RSU agents to optimize speci-
fic performance criteria (efficiency, travel time) while
satisfying the physical constraints of the transport sy-
stem (traffic lights).
2.2.1 Centralized Approach
In terms of security, a centralized architecture is parti-
cularly vulnerable. It offers only one gateway, its cen-
tralized controller, which is the main weakness of the
entire network. It would effectively block this con-
troller to disconnect all users and stop the operation
of the entire network.
Reservation Scheme. In this approach, there is an in-
tersection manager (central controller) that coordina-
tes the reservation based on requests and information
received from the driver agents in the communication
range. The intersection is divided into cells to be as-
signed for a single vehicle at each moment to avoid
collisions. In (Dresner and Stone, 2004) the authors
proposed the use of the reservation scheme to cont-
rol an intersection with vehicles traveling with similar
speed on a single direction on each road. Each vehi-
cle is treated as a driver agent which request the re-
servation of space-time cells to cross the intersection
during a particular segment of time defined between
estimated arrival hour and the intersection. When the
A Hybrid Multi-agent Architecture for Modeling in MATSim with an Alternative Scoring Strategy
187
central reservation system receive the request, it ve-
rify if there is no conflict with the already accepted re-
servations. If the request is rejected, the driver agent
must decelerate and send a new reservation request.
In the case, each driver agent has the choice to decide
its trajectory to fulfill the crossing time interval. To
test the proposed system, the authors taken in consi-
deration the delay incurred by the vehicles due to the
deceleration required until the reservation request is
accepted.
2.2.2 Decentralized Approach
The main challenge faced in the implementation of
decentralized approaches is the possibility of having
deadlocks in the solutions as a consequence of the use
of local information, and also the broadcast series on
the network can have the effect of polluting and there-
fore slowing the data exchange between different en-
tities of the network.
Fuzzy Logic. In (Milan
´
es et al., 2010) The authors
Designed a controller based on fuzzy logic, which
permit to a fully autonomous vehicle to yield to an
entering vehicle in the merging zone, or to cross if
it is possible and do not cause a lateral collision. The
fuzzy controller controls the accelerator and brake pe-
dals of the autonomous vehicle. This work was exten-
ded in (Onieva et al., 2012). The proposed control
scheme consists of a fuzzy control system of three
layers. The first layer, detects whether a turn or a
straight trajectory through the intersection is requi-
red. The second layer, precise a feasible speed va-
lue to cross the intersection safely, in this layer the
fuzzy algorithm is optimized by a genetic algorithm.
The third layer, determines the required accelerator
and brakes commands to follow the speed reference
given by the second layer. Simulation results showed
that the system was able to coordinate the vehicles
without collisions.
2.3 Scoring in MATSim
In our discussion on simulator features, we focus on
the scoring module, that is one of the main elements
of the simulation in MATSim, there are many docu-
ments already published treating this part of MAT-
Sim, such as (Balac et al., 2018) That presented and
tested the performance of an alternative activity sco-
ring function in MATSim which can be used to ob-
serve induced/suppressed demand effects. The results
show that the proposed piece-wise linear function re-
presents the behavior of people on the same if not bet-
ter level than the logarithmic form. Piece-wise linear
functions avoid several limitations of the logarithmic
form. They avoid that even small performance dura-
tion leads to high utility scores. They better represent
the behavior of people in case of shortage or access
time by prioritizing different activities which is con-
trolled by the slope of the function. Another enhance-
ment of MATSims utility function is proposed in (Feil
et al., 2009). This paper proposed a new MATSim uti-
lity function for the performance of activities, based
on an asymmetric S-shaped curve with an inflection
point as presented by (Joh, 2004) the new function can
cope with a flexible number of activities in an activity-
travel schedule as it formulates an optimal activity du-
ration by its functional form. In our proposition, the
utility function is based only on the time spent while
traveling, in order to optimize the maximum possible
the agents itinerary, which implies the improvement
of the performance achieved by the plans generated
by such new utility function.
3 OPERATION OF AN AGENT
There are two types of agents: Reactive agents and
deliberative agents (Russell and Norvig, 2016).
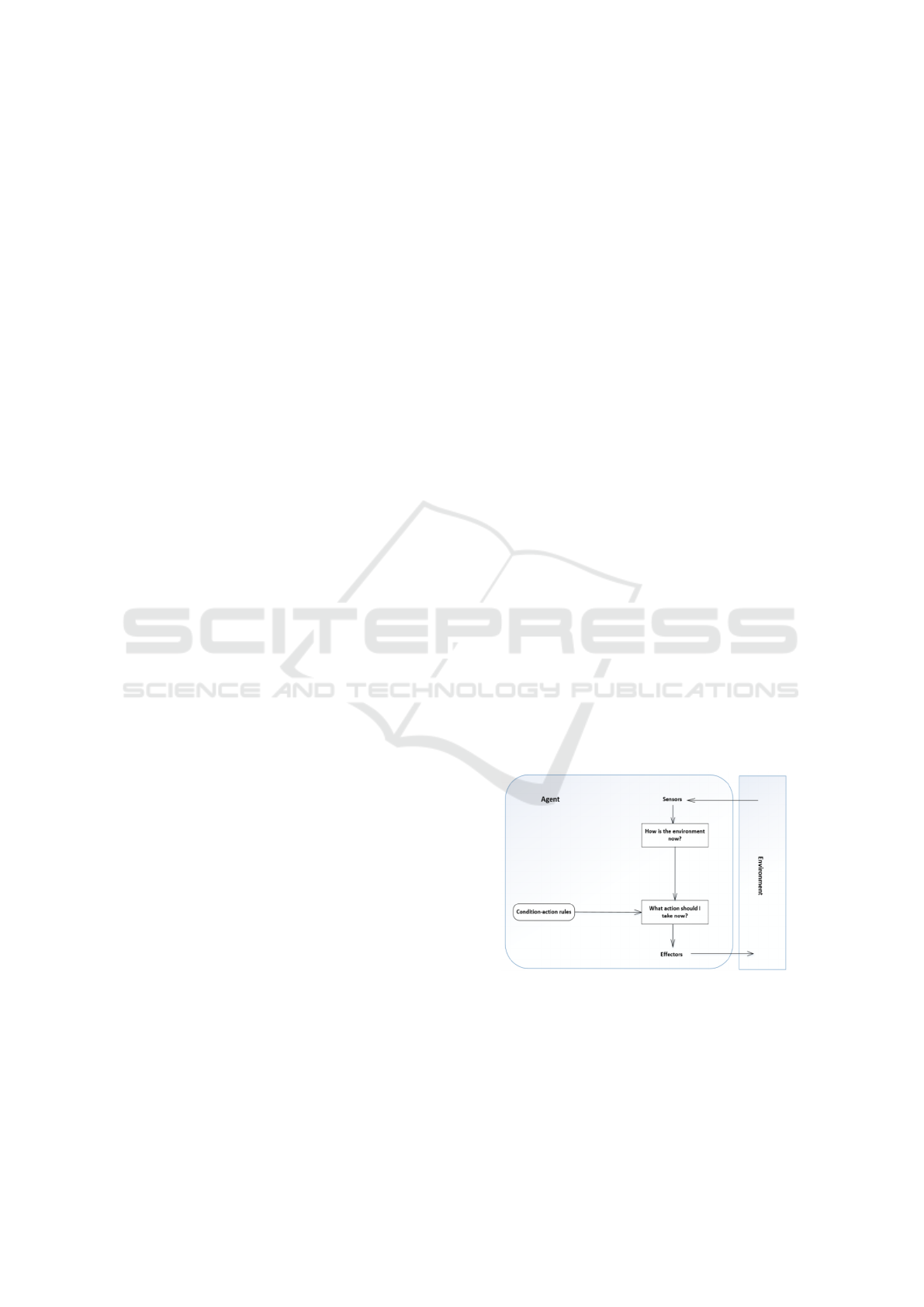
3.1 Reactive Agents
This type of agent perceives the state of the environ-
ment and decides immediately on the corresponding
action such as for example those based on Brookss
Subsumption Architecture (Brooks, 2014). This type
of agents can be divided into two: Simple reflex agent
illustrated in figure 1 and reflex agent with model il-
lustrated in figure 2.
Figure 1: Simple reflex agent.
3.2 Deliberative Agents
In many situations the action to be performed by an
artificial agent has to be computed not only on the ba-
sis of the state of the environment but also on the basis
of its expected effects on it, that is, the agent reasons
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
188
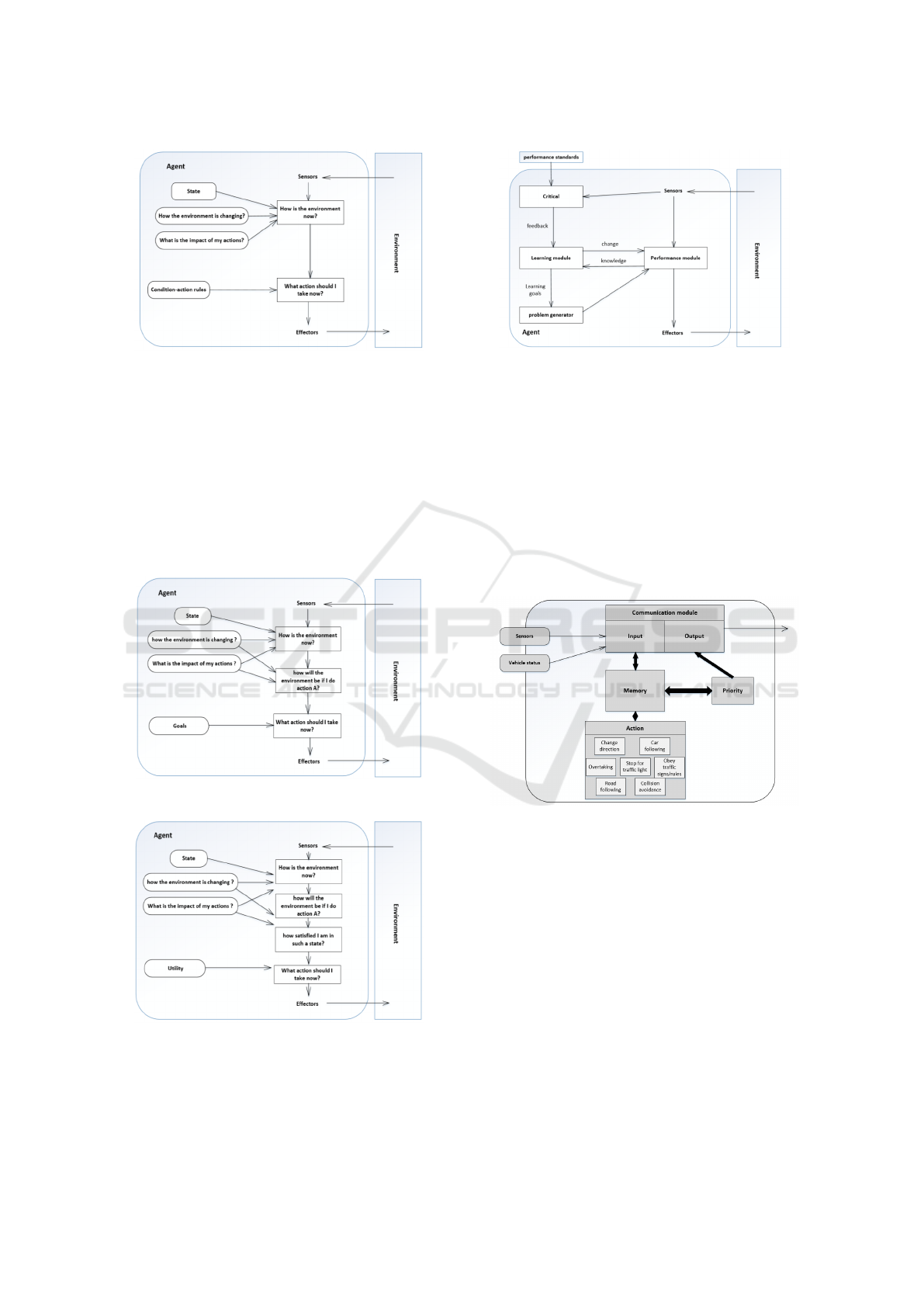
Figure 2: Reflex agent with model.
about its actions. This type of agent needs to have a
model of the dynamics of the environment and of the
effects of its actions on it. Deliberative agents may
appear less efficient than reactive agents because they
have to reason about the action to perform but they are
far more autonomous and flexible than reactive agents
(Balmer, 2007). In literature there are three types of
deliberative agents: Agent with goals illustrated in fi-
gure 3, agent with utilities illustrated in figure 4, and
the learner agent illustrated in figure 5.
Figure 3: Agent with goals.
Figure 4: Agent with utilities.
Figure 5: Learner agent.
4 DRIVERAGENT MODELLING
Our model is based on a deliberative behavior. We
use a deliberative behavior, as a type of behavior that
is linked to a cycle, that is to say, when an agent recei-
ves information from the environment via its sensor,
it does not directly trigger an action, this information
goes through a set of states, before the agent makes
the decision on the consequences of his actions on the
environment. The figure 6 illustrates this approach.
Figure 6: DriverAgent Model.
DriverAgents communicate through messages ex-
changed via the communication module. Each of the
agents has a sensor that not only provides informa-
tion on its state, but also on the state of the environ-
ment. This information is sent to the communication
layer that processes it and then routes the results to
the agent’s memory. The module Priority chooses
the highest priority action based on the prediction of
the position of other vehicles on the environment, and
sends it to the communication module.
A Hybrid Multi-agent Architecture for Modeling in MATSim with an Alternative Scoring Strategy
189
5 PRESENTATION OF THE
ARCHITECTURE OF OUR
MODEL
The basic organizational structure of our system con-
tain three types of agents having each one characteris-
tics that distinguish it from others: driver agent, RSU
agent, traffic control agent (see figure 7).
5.1 Driver Agent
This only dynamic component drives the road net-
work. Each vehicle is equipped with sensor informa-
tion allowing the agent to perceive its environment.
Driver agents collaborate to monitor the road net-
work. Indeed, they produce information contributing
to knowledge in real time traffic conditions or predict
traffic conditions. All events observed by the vehi-
cle during its movement must be transmitted to other
vehicles, which transmit this message to the nearest
RSU agent. In turn, the RSU agent may send a mes-
sage to a stub of vehicles. Generally the exchanged
data are intended to produce alerts and inform drivers
of an event occurring.
5.2 RSU Agent
This static component represents a specific point of
the transport network: at each intersection, we in-
troduce an RSU agent. It produces, in real time, in-
formation about the current state of traffic within the
road segments that it manages. The RSU agent must
handle messages emitted by vehicles in the first place
to inform the traffic control agent of disruptions to
normal traffic situation. Second, he warns drivers on
their way to the place of accident for example. The
RSU agent can exploit the average speeds, the time
inter-vehicles to take information on the status of traf-
fic: fluid, dense or blocked.
5.3 Traffic Control Agent
Communication vehicle-to-vehicle and communica-
tion road side units-to-vehicle used to exchange a cou-
ple of accurate information on traffic conditions. Fol-
lowing these exchanges, the traffic control agent will
have a global vision on the road network of the area
it oversees. The main goal of this supervision is to
maximize road safety and minimize the time spent on
the roads. The traffic control agent collects the in-
formation on road conditions from RSU agents then
synthesizes the data. Once the traffic control agent
has a more complete view of the road network, it bro-
adcasts information to RSU agents.
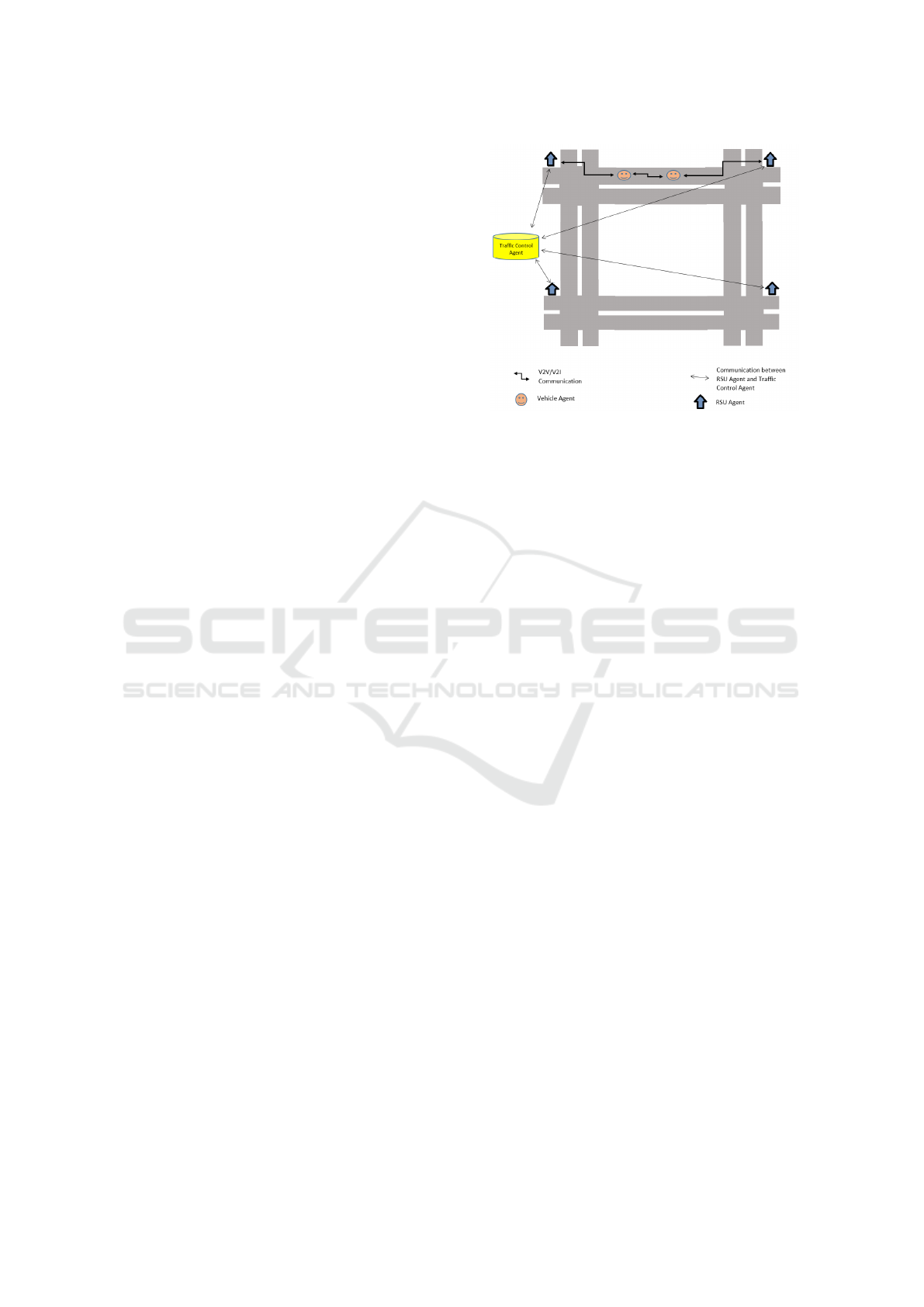
Figure 7: Global Architecture.
6 HYBRID COORDINATION
APPROACH
We have seen that the centralized architecture poses
problems of security, robustness, and limitation of the
bandwidth. The problems come directly from the use
of a central controller. So to remove the central con-
troller it is necessary to distribute the treatment that
must be done at the level of each vehicle, then to
make them communicate. It is on these mechanisms
that decentralized Peer to Peer networks are based.
So there are no more central controllers, it is all the
elements of the network that will play this role (Dri-
ver Agents, RSU Agents). Each vehicle in its roles is
identical to another, which is why these types of pure
Peer to Peer networks are called. Nevertheless, it ex-
plodes communication costs: the number of messages
exchanged between the vehicle agents is of quadratic
complexity, as well as the broadcast series which are
broadcast on the network and which have the effect of
polluting and therefore slowing the exchanges of data
(V2V or V2I). This is why for our simulation well use
our proposition, the hybrid approach, where all agents
containing in the Multi-agent system participate in the
coordination of traffic at intersection.
The hybrid approach (see Figure 8) is a compro-
mise between the centralized and decentralized ap-
proach. The RSU agent is inserted between the driver
agent and the traffic control agent and has the role of
producing, in real time, information about the current
state of traffic within the road segments that it mana-
ges. And must handle messages in the first place to in-
form the traffic control of disruptions to normal traffic
situation. Even if communication vehicle-to-vehicle
communication is used to perceive the environment
to produce information contributing to knowledge in
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
190

real time traffic conditions or predict traffic conditi-
ons, the roadside units-to-vehicle communication is
also used to exchange a couple of accurate informa-
tion on traffic conditions. Following these exchanges,
the traffic control agent will have a global vision on
the road network of the area it oversees. The main
goal of this supervision is to maximize road safety
and minimize the time spent on the roads. The traf-
fic control agent collects the information on the RSU
agents then synthesizes the data. Once the traffic con-
trol agent has a more complete view of the road net-
work, it broadcasts information to RSU agents.
Figure 8: Hybrid Approach.
7 MATSim
MATSim (Multi-Agent Transport Simulation) (Bal-
mer et al., 2009) is a framework for agent-based mi-
crosimulations (traffic simulator). It consists of se-
veral modules that can be used independently. It is
developed by the teams at ETH Zrich(Swiss Fede-
ral Institute of Technology in Zrich) and TU Ber-
lin(Technical University). (Balmer, 2007) Provides a
detailed description of the frame. Because of its micro
agent-based approach, each individual in the system
is modeled as an individual agent, and each of these
agents has custom parameters such as available mo-
des of transportation and scheduled daily activities.
As the simulation framework has a modular structure,
the agent’s parameters can be easily extended with
new parameters. MATSim tries to optimize the tra-
vel demand in large scenarios. The optimization of
the travel demand is done following an evolutionary
algorithm, by going through different modules (exe-
cution, scoring and replanning) iteratively.
In MATSim, each agent has his own plan, which
contains both the activities planned for the agent and
the modes of transportation (legs) linking these activi-
ties. The Modes of transport and activities may con-
tain several attributes, describing the route from one
activity to another, such as departure time, estimated
time of arrival, links connecting activities, etc. thus
the plans are introduced so that they are optimized by
the iterative process described above. To do this, the
system iterates between the generation of the plane
(the mental layer) and the simulation of the traffic
flow (the physical layer). MATSim remembers se-
veral plans per agent and scores each plan based on
its performance measured by a scoring function. The
re-planning mechanism is continued until the plans
reach an approximate balance. A formal definition of
this mechanism can be found in (Nagel and Fl
¨
otter
¨
od,
2012).
8 EXTENDING MATSim
The contribution in the second section of this paper is
to provide MATSim with a new scoring function so
that the execution of the simulation will be controlled
by the parameters that we need to implement. In this
section we describe the modifications that have been
introduced in the simulator.
8.1 Scoring
As a result of the traffic flow simulation, events
(MATSim events) are produced to calculate the ef-
fective utility of each daily plan, taking into account
the effects of interaction between agents. A good
daily plan is specified by a utility function. MATSim
currently uses an effective utility function described
in (Charypar and Nagel, 2005). Without going into
details, the elements of the utility function are:
• A positive contribution for the (usually) positive
utility earned by performing an activity.
• A negative contribution (penalty) for traveling.
• A negative contribution for being late.
The utility function induces the behavior of the
agent, because the agent searches in the solution space
of the utility function for the best possible score,
which implies the best possible daily plan.
In general, the scoring function calculates the
score for one plan of an agent. As long as we work
on autonomous vehicles, our main goal is to ensure
users safety and to save his money, thats why we must
avoid possible congestions, and subsequently the loss
of time and money. Thats why we proposed a cus-
tom scoring function (1) by adding and deleting some
factors to meet our experimental need:
A Hybrid Multi-agent Architecture for Modeling in MATSim with an Alternative Scoring Strategy
191
U
plan
=
n
∑
i=1
(u
travel,i
) (1)
where n is the number of activities an agent has
in his daily plan. In general, traveling decreases the
score (negative utility).
U
travel,i
= α
mode
+ β
T T,mode
.T T + β
cost,mode
.Dist
(2)
+ β
CongT
.CongT (3)
where α
mode
is a constant depends on the mode
used (car, bike, bus...), β
T T,mode
is the marginal utility
of traveling, β
cost,mode
is the marginal utility of cost
for the specific mode, β
CongT
is the marginal utility of
the congestion.
The novelty is that our new scoring function de-
pends only on the utility of traveling (1), so we over-
looked the utility of exercising an activity. Then, we
added a new factor inside the utility of traveling for-
mula (2), a factor that reacts on driver agents who en-
ter a link and find it with a level of congestion bigger
than a fixed threshold (3). The Algorithm 1 illustrates
the congestion engine injected in MATSim.
Begin
Static class CongestionEngine{
private EventsManager eventsManager;
private Map<Id<Vehicle>,
Id<Person>> vehicle2driver=new HashMap<>();
[...]
Public void handleEvent(LinkEnterEvent event){
If (congestion()){
EventsManager.processEvent(new
CongestionEvent(event.getTime(),
vehicle2driver.get(event.getVehicleId())));
} }
Private Boolean congestion(){
If (Road.carsOnTheRoad.size() >=
Road.maxNumberOfCarsOnRoad) {
Return true;
} else {
Return false;
} } }
End
8.2 Case Study
8.2.1 Berlin Example
We executed the simulation using MATSim, and we
applied it on the example of Berlin (Planning and
group of Technische Universitt Berlin, 2018). For
each simulation on MATSim you need at least three
types of files: configuration file, network file and po-
pulation file. So to run the simulation we will loaded
the configuration file directly, the latter which will
contain the path to the network file and the popula-
tion file. Regarding the population file, the number
of agents in this example is 15931. We executed the
simulation twice: The first results were with the cur-
rent scoring function of MATSim, while the second
results were with the new scoring function.
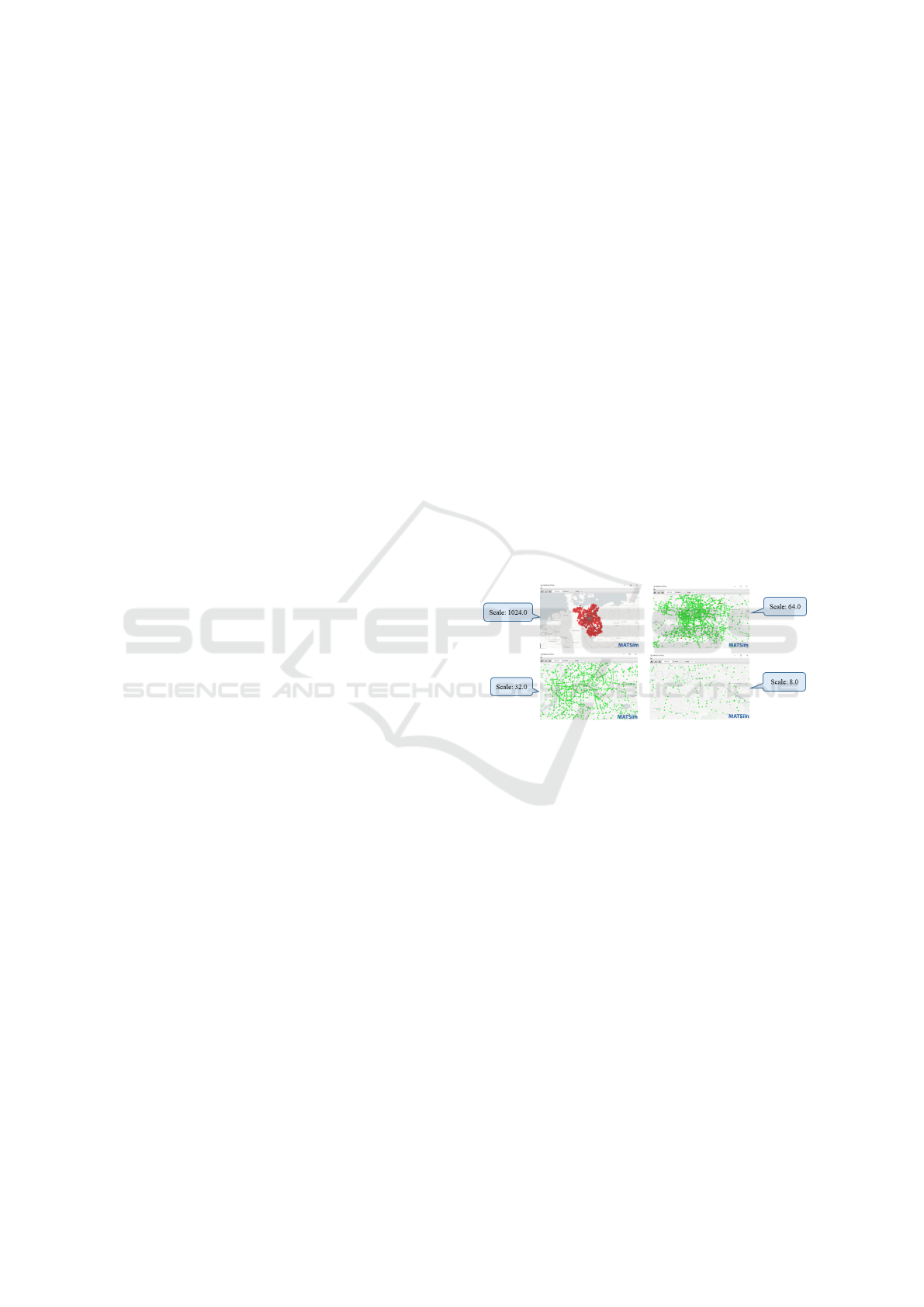
8.2.2 OTFvis Visualizer
The short term for On the Fly Visualizer, OTFVis was
designed to support actual visualization of live simu-
lation runs with MATSim. Therefore, the purpose of
the OTFVis is the debugging of MATSim (input) data.
The OTFVis is written in Java and available as source
code to extend for different MATSim projects special
needs (Horni et al., 2016). We will use the OTFVis to
view the traffic on the Berlin network. The OTFVis
will display OSM-maps(Open Street Maps) as back-
ground, by setting option mapOverlayMode in OTF-
VisConfigGroup class to true, and the coordinate sy-
stem of our scenario (Berlin scenario) in the confi-
guration file (global section). in the figure 9, we il-
lustrated the Berlin network visualization on OTFVis,
before and during the execution of the simulation.
Figure 9: Visualization on OTFVis of the Berlin scenario.
8.2.3 Results
At the end of all iterations we analyzed the output
plans file, we extracted the results and we represented
them on a histogram (see figure 10) with agents on the
abscissa and the number of replannings done for each
agent as ordinates. So, after the analysis we found
out that more replannings are done with the new sco-
ring function, which means that the plans generated
by our utility function are more improved in terms of
the time spent while traveling. Moreover, the more
replannings are done at each execution, the more opti-
mization and a better itinerary is calculated in order to
gain a better score, which impacts positively the per-
formance of a given plan. So, the new scoring metho-
dology that we proposed is more effective, especially
with congestion scenarios.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
192

Figure 10: The effect of the new scoring function on agent’s
plans improvement.
9 CONCLUSION
The main goal of this paper was to propose an ar-
chitecture of agents (Driver agent, RSU agent, Traf-
fic control agent) to model the transportation system,
then project it on a traffic simulator to run the simu-
lation where we can observe and optimize the rou-
tes and the time spent travelling by the DriverAgent.
For that we used a special traffic simulator that cal-
led MATSim. Our addition to the simulator is to
propose an alternative scoring function which can be
used to observe induced congestion effects. The re-
sults show that the proposed function improves agents
plans better than the current scoring function. Future
works will be headed to propose a platform that repre-
sents communications between a wide range of auto-
nomous transport systems, and to deploy a large num-
ber of scenarios highlighting the vulnerabilities of au-
tonomous transport systems, particularly in a context
with a large number of interactions between vehicles
in real traffic situation.
REFERENCES
Balac, M., Janzen, M., and Axhausen, K. W. (2018). Al-
ternative approach to scoring in matsim and how it
affects activity rescheduling. In Proceedings of the
97th Annual Meeting of the Transportation Research
Board (TRB 2018). The National Academies of Scien-
ces, Engineering, and Medicine.
Balmer, M. (2007). Travel demand modeling for multi-
agent transport simulations: Algorithms and systems.
PhD thesis, ETH Zurich.
Balmer, M., Rieser, M., Meister, K., Charypar, D., Le-
febvre, N., and Nagel, K. (2009). Matsim-t: Archi-
tecture and simulation times. In Multi-agent systems
for traffic and transportation engineering, pages 57–
78. IGI Global.
Brooks, R. A. (2014). How to build complete creatures rat-
her than isolated cognitive simulators. In Architectu-
res for intelligence, pages 239–254. Psychology Press.
Charypar, D. and Nagel, K. (2005). Generating complete
all-day activity plans with genetic algorithms. Trans-
portation, 32(4):369–397.
Dresner, K. and Stone, P. (2004). Multiagent traffic mana-
gement: A reservation-based intersection control me-
chanism. In Proceedings of the Third International
Joint Conference on Autonomous Agents and Multia-
gent Systems-Volume 2, pages 530–537. IEEE Com-
puter Society.
Feil, M., Balmer, M., and Axhausen, K. W. (2009). En-
hancement and empirical estimation of matsims uti-
lity function. In 9th STRC Swiss Transport Research
Conference: Proceedings. Swiss Transport Research
Conference.
Ferber, J. and Weiss, G. (1999). Multi-agent systems: an
introduction to distributed artificial intelligence, vo-
lume 1. Addison-Wesley Reading.
Horni, A., Nagel, K., and Axhausen, K., editors (2016).
Multi-Agent Transport Simulation MATSim. Ubiquity
Press, London.
Joh, C.-H. (2004). Measuring and predicting adaptation in
multidimensional activity-travel patterns. PhD thesis,
Technische Universiteit Eindhoven.
Milan
´
es, V., P
´
erez, J., Onieva, E., and Gonz
´
alez, C. (2010).
Controller for urban intersections based on wireless
communications and fuzzy logic. IEEE Transactions
on Intelligent Transportation Systems, 11(1):243–248.
Nagel, K. and Fl
¨
otter
¨
od, G. (2012). Agent-based traffic as-
signment: Going from trips to behavioural travelers.
In Travel Behaviour Research in an Evolving World–
Selected papers from the 12th international confe-
rence on travel behaviour research, pages 261–294.
International Association for Travel Behaviour Rese-
arch.
Onieva, E., Milan
´
es, V., Villagra, J., P
´
erez, J., and Godoy,
J. (2012). Genetic optimization of a vehicle fuzzy de-
cision system for intersections. Expert Systems with
Applications, 39(18):13148–13157.
Planning, T. S. and group of Technische Universitt Ber-
lin, T. T. (2018). The matsim open berlin scenario.
https://github.com/matsim-vsp/matsim-berlin.
Russell, S. J. and Norvig, P. (2016). Artificial intelligence:
a modern approach. Malaysia; Pearson Education Li-
mited,.
Wenjie, C., Lifeng, C., Zhanglong, C., and Shiliang, T.
(2005a). A realtime dynamic traffic control system
based on wireless sensor network. In Parallel Pro-
cessing, 2005. ICPP 2005 Workshops. International
Conference Workshops on, pages 258–264. IEEE.
Wenjie, C., Liqiang, G., Zhilei, C., Zhanglong, C., and Shi-
liang, T. (2005b). An intelligent guiding and control-
ling system for transportation network based on wire-
less sensor network technology. In Computer and In-
formation Technology, 2005. CIT 2005. The Fifth In-
ternational Conference on, pages 810–814. IEEE.
Wiering, M. (2000). Multi-agent reinforcement learning
for traffic light control. In Machine Learning: Pro-
ceedings of the Seventeenth International Conference
(ICML’2000), pages 1151–1158.
A Hybrid Multi-agent Architecture for Modeling in MATSim with an Alternative Scoring Strategy
193
