
Flight Radius Algorithms
Assia Kamal Idrissi
1,2
, Arnaud Malapert
2
and R
´
emi Jolin
1
1
Milanamos, 1047 route des Dolines, Sophia Antipolis, France
2
Universit
´
e C
ˆ
ote d’Azur, CNRS, I3S, France
Keywords:
Flight Radius Problem, Time-independent Model, Graph Database, Shortest Path Algorithms.
Abstract:
In this article, we present the flight radius problem (FRP) on the condensed flight network (CFN). Then, giv-
ing a specific flight that is defined by an origin and destination (OD) pair, the problem consists in finding
routes that connect the OD pair and satisfy a regret constraint on time, distance or cost. The found routes help
airline manager to find business opportunities. This problem arises in the real world, for instance in some air
transportation companies. The FRP is formulated as finding a maximal subgraph of nodes belonging to routes
satisfying a regret constraint. Such routes can be found using shortest paths algorithms (SPA). The CFN is
generated using a time-independent approach and stored in the graph database Neo4j. Implementing SPA in
Neo4j is challenging since the graph database stores the weights of the graph in a separate data structure. In
this paper, we propose four methods to solve the FRP: these methods combine parallel and sequential process-
ing with more optimization to overcome time and memory costs. The experimental evaluation demonstrates
that the best algorithm is the extended Dijkstra algorithm which meets the real-time constraints of the targeted
industrial application.
1 INTRODUCTION
The growth of air passenger needs has forced air-
lines to improve their quality of service. The air-
lines should offer flights that match with preferences
of passengers. For this reason, most airlines are in-
terested in the quality of service models called QSI.
This is a market share model used by airlines to esti-
mate their part of the market. The model determines
the probability a traveler selects a specific itinerary
connecting an airport pair based on a list of criteria
(Jacobs et al., 2012). Then, let us suppose an air-
line network, where nodes are the airports and arcs
represent flights. Each arc is associated with a time,
distance, and cost. The question is to decide if it is
interesting to add a flight between a pair of airports
(OD) in that network. More precisely, adding a new
arc would allow passengers to make itineraries which
are a little bit longer but cheaper than going directly
to their destination? For this, the flight radius prob-
lem (FRP) consists in finding routes that pass by a
potential arc and satisfy a regret constraint. This con-
straint aims to model passengers preferences. Practi-
cally, there are many criteria to be considered but the
three considered in this study are time, distance, and
cost. The FRP is derived from PlanetOptim appli-
cation developed by the company Milanamos which
is a startup specialized in air transportation. This ap-
plication is a decision tool for airline managers to an-
alyze and simulate a new market using QSI models.
Then, given a specific flight that is defined by an OD
pair, the process in the application starts by finding
relevant airports with respect to the specific flight and
then estimates market share for each route connecting
the origin to the destination. Following this, the air-
line manager makes a decision about adding the new
flight.
Motivating Example. Let us consider this example
for which a new route will be created between NCE
and BKK airports (see Figure 1). This new route
allows passengers coming forward NCE to reach other
airports via BKK. Taking the new flight can be a little
bit longer but cheaper, than going directly to the final
destination. The choice depends on the passengers
since they have different preferences. Actually, the
application returns some uninteresting airports. For
instance, going from CDG to DXB via BKK is not a
realistic itinerary for a passenger. The itinerary is too
long and expensive than going directly. Then, the
idea of the FRP is to filter the routes that do not match
over preferences. For this reason, these preferences
should be integrated into this problem.
370
Kamal Idrissi, A., Malapert, A. and Jolin, R.
Flight Radius Algorithms.
DOI: 10.5220/0007388503700377
In Proceedings of the 8th International Conference on Operations Research and Enterprise Systems (ICORES 2019), pages 370-377
ISBN: 978-989-758-352-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: Screen-shot of PlanetOptim application. CDG:
Paris, DXB:Dubai, NCE:Nice, BKK:Bangkok, dashed air-
ports represent uninteresting airports.
The FRP is formulated as finding a maximal sub-
graph such that for each node there exists a path that
satisfies the regret constraint. The regret is defined
for each criterion. Such paths can be retrieved using
shortest paths algorithms. We simply begin by work-
ing on the CFN, which is stored in a graph database
Neo4j. This database uses a graph structure and its
graphical interface visualizes easily the airline net-
work. However, Neo4j stores each node’s and arc’s
properties separately: accessing those properties is
relatively slow. Then, implementing the SPA in a
graph database like Neo4j is challenging.
In this paper, we propose four methods to solve the
FRP on the CFN. The first two are algorithms that de-
compose the FRP in shortest path problems and solve
them in parallel using as shortest path algorithm: Di-
jkstra and Bellman. The third one extends the Dijkstra
algorithm. However, the last one uses a Bellman al-
gorithm that computes at once all shortest paths from
both origin and destination for all criteria. We use par-
allel processing and sequential with more optimiza-
tion to overcome time and memory costs.
The paper is organized as follows. Section 2 in-
troduces some definitions of graph theory and some
shortest path algorithms. In Section 3, we describe
the CFN modelling and the graph database structure.
Section 4 gives the formulation of the FRP and its
properties. Section 5 describes the four algorithms.
Section 6 is dedicated to experiments.
2 PRELIMINARIES
This section gives definitions of graph theory (Ahuja
et al., 1993). Then, it states some shortest path algo-
rithms.
2.1 Graph Theory
A graph G is a couple G = (V, E) consisting of a finite
set V of nodes and a set E ⊆ V × V of arcs which
are ordered pairs (u, v) if the graph is directed. Each
arc (u, v) ∈ E has an associated non-negative weight
w(u,v). We define |V | = n, the order of the graph as
the number of nodes meanwhile |E| = m its size.
A graph G
0
= (V
0
,E
0
) is a subgraph of G if
V
0
⊆ V and E
0
⊆ E. A path is a sequence of nodes
{v
1
,v
2
,...,v
k
} such that for each 1 ≤ i < k,(v
i
,v
i+1
) ∈
E holds. If additionally v
1
= v
k
, then the path is a
cycle. The length of a path P is the sum of its arc
weights along the path and is denoted by:
l(P) :=
k−1
∑
i=1
w(v
i
,v
i+1
).
We define l
?
(s,t) for a given pair of nodes s and t, the
length of the shortest path starting at s and ending at t.
A graph G is connected if there exists a path joining
any two nodes. A transportation network should be a
connected graph.
2.2 Shortest Path Algorithms
There are two categories of shortest path algorithms:
setting algorithms and correcting algorithms. The two
types of algorithms are based on the labeling method
and differ in the strategy of selecting labeled nodes to
be scanned (Cherkassky et al., 1996).
Labeling Method. The labeled method is defined
as follows. For each node u, the method maintains
a distance label d(u), which is an upper bound on
the shortest path length to the node u, parents p(u),
and status S(u). We have three status: unreached,
labeled, and scanned. Initially for each node u,
d(u) = in f , p(u) = nil, and S(u) = unreached. For
a start node, the method sets d(s) = 0 and S(s) =
labeled. Then, the method starts by scanning labeled
nodes until such node does not exist here. The SCAN
operation of a labeled node consists in checking for
all outgoing arcs (u, v) ∈ E, if d(u) + w(u,v) < d(v)
(see Function 1). Then, if it is, d(v) is updated, S(v)
become labeled, and S(u) is scanned. If there are no
negative cycles, the arcs (p(u),u) form a tree rooted
at s. When the algorithm stops, the tree rooted at s is
the shortest path tree.
Function 1: SCAN(u).
foreach (u, v) ∈ E do
if d(u) + w(u, v) < d(v) then
d(v) ← d(u) + w(u,v);
S(v) ← labeled;
p(v) ← u;
end
end
S(u) ← scanned;
Flight Radius Algorithms
371
Setting Algorithms. The Dijkstra algorithm (Di-
jkstra, 1959) is the most known setting algorithm that
works with positive weight arcs. In this algorithm,
the principle is to select a node with the minimum
weight at each iteration. It scans each node at most
once. That leads to a complexity of O(n
2
) as time
bound in the worst case (Ahuja et al., 1993) where n
is the number of nodes. Two sets are maintained: a
permanently set that represents selected nodes and a
temporary set that designates nodes not yet selected.
The algorithm performs the node selections operation
n times. Each operation requires that it scans each
temporarily labeled node which leads to O(n
2
). Be-
sides, the algorithm performs the distance updates op-
eration for all outgoing arcs of a node v. Overall,
the algorithm requires O (m) since each operation re-
quires, a constant time, O(1). In the end, Dijkstra’s
algorithm solves the shortest path problem in O(n
2
).
There are many versions of Dijkstra’s
algorithm with the aim of improving this time
bound by trying different data structures and several
implementations of the algorithm. In some applica-
tions of the shortest path problem, we want uniquely
to determine the shortest path between two nodes.
Bidirectional Dijkstra’s algorithm solves
the problem of finding the shortest path between two
nodes faster since it eliminates some unnecessary
computations by reducing the number of visited
vertices in practice. Besides, the A* search is an
acceleration of Dijkstra’s algorithm in the sense
that it preferably settles nodes that are closer to the
destination when finding the shortest path between
two nodes.
Correcting Algorithms. The Bellman algorithm
achieves the best currently known bound of time with
negative weight arcs O(nm). The algorithm main-
tains the set of labeled nodes in a FIFO queue and al-
lows detecting a negative cycle in a weighted directed
graph. In Bellman, the next node to be scanned is
removed from the head of the queue; a node that be-
comes labeled is added to the tail of the queue. The
algorithm performs at most n−1 passes through arcs.
Since each pass requires O (1) computations for each
arc, this implies O(nm) time bound for the algorithm.
Bellman is qualified as a robust algorithm since there
is no priority queue. Some heuristics have been in-
troduced to improve the practical performance of the
algorithm. For instance, (Cherkassky et al., 1996) in-
troduce a parent checking heuristic that scans a
node only if its parent is not in a decrease.
3 CONDENSED FLIGHT
NETWORK
3.1 Modelling
The condensed flight network (CFN) is generated
from the flight timetable using the time-independent
model. Nodes represent airports meanwhile the pres-
ence of an arc indicates that there exists at least one
elementary connection between two airports. Time,
distance, and cost labels are associated with each arc
of the CFN. In our study, we omit time scheduling
and keep only the transfer time represented by an arc
in the graph. This technique is often used to model the
information about the transfer since it is important in
computing shortest paths (Delling et al., 2009).
The model consists in creating two nodes for each
airport node: one to model flight departures and an
other to represent flight arrivals. Then, we introduce
three different types of arcs. board at is inserted
from an airport to departure node, alight at is in-
serted from an arrival node to the airport, and finally a
connect to to model the transfer time between an ar-
rival node and departure node of the same airport with
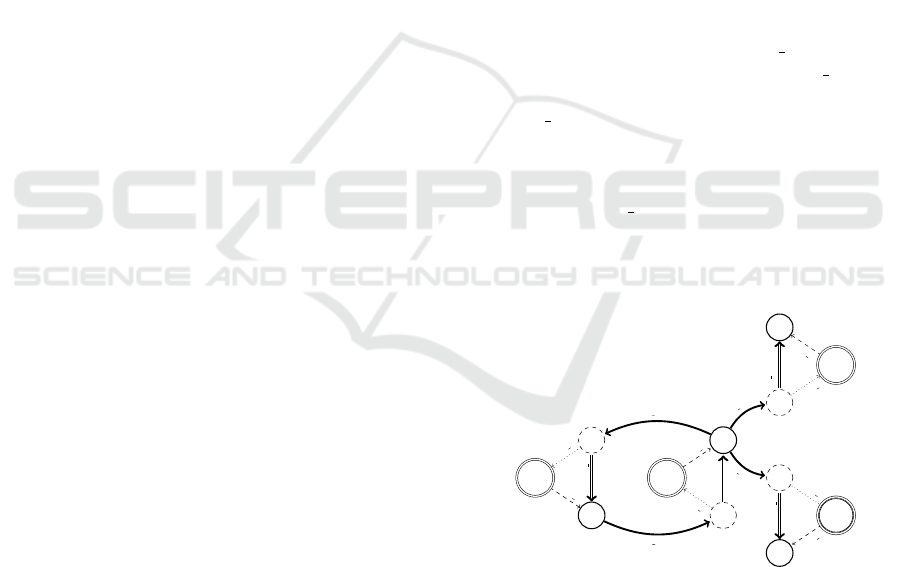
a transfer time. In Figure 2, the graph contains four
airports: NCE, BKK, PEK, ICN and four flight arcs
referenced by year month. Nodes in thin style repre-
sent departures, dashed nodes for arrival nodes. Dou-
ble arcs are transferring time. Besides, dotted arcs for
arrivals and dashed arcs for departures.
NCE
d
1
o
1
BKK
o
2
d
2
P EK
o
3
d
3
ICN
o
4
d
4
year month
year month
connect to
alight at
board at
board at
alight at
alight at
board at
year month
connect to
year month
board at
alight at
connect to
Figure 2: The CFN of the motivating example.
3.2 Graph Database
The CFN is stored in Neo4j graph database (Neo
Technology, 2017). Neo4j is used for many appli-
cations, typically recommendation systems and com-
plex networks like transportation network. Neo4j
graph database follows the property graph model to
store and manage its data. In Neo4j, data are repre-
sented in nodes, relationships, and properties or at-
ICORES 2019 - 8th International Conference on Operations Research and Enterprise Systems
372

tributes. Both nodes and relationships contain proper-
ties (Robinson et al., 2015). A relationship connects
a pair of nodes: start & end, it has a direction and a
type. Neo4j proposed APOC (Awesome Procedures
on Cypher) as stored procedures that regroup a list of
procedures (Neo Technology, 2017). In addition, the
graph database offers the possibility to implement al-
gorithms as user defined procedures. It simplifies the
querying process.
Shortest Path Algorithms in a Graph Database.
The Neo4j graph database is proved suited for the
shortest path calculation for transport purposes (Miler
et al., 2014). The authors compare the performance of
Dijkstra implemented on Neo4j and PostgreSQL.
Results show that Neo4j outperforms the relational
database. It comes from the structure of the graph
database, the nodes and relationships are stored in
a very compact, quick-to-access format. Once a
node or relationship is retrieved, getting the adja-
cent relationships or nodes is very fast. However,
it stores each node’s (and relationship’s) properties
separately, meaning that looking through properties
is relatively slow. Then, accessing to properties file
are costly which leads to extra IO. This is the im-
portant difference between the graph theory and the
graph database.
Existing Database. The CFN, stored in the graph
database, is generated from a real-world database
which is a NoSQL database. This database uses a
MongoDB that stores data in a disconnected way and
does not use a graph structure. In MongoDB, data are
collected and queried monthly. Then it makes sense
to create a relationship per period which is a month
of the year. The relationship represents flight infor-
mation (see Figure 2). We dispose of historical data
about the last fifteen years. The CFN is generated for
two years and has 13,732 nodes and 1,148,303 rela-
tionships.
4 PROBLEM FORMULATION
This section gives the formulation of the flight radius
problem and also some of its properties.
4.1 Formulation
The flight radius problem consists in retrieving only
relevant routes regarding a specific flight, and satisfy-
ing the regret constraint. The considered flight is de-
fined by and OD pair and represented by an arc (o, d)
in the CFN where o, d ∈ V . Then, traveling from
o
1
∈ V to d
1
∈ V by passing through the arc (o,d)
is interesting if and only if the path {o
1
,..,o,d,..,d
1
}
between o
1
and d
1
satisfies the regret constraint. The
satisfaction of the constraint depends on the shortest
path between o
1
and d
1
. Let R be a Boolean regret
constraint defined on paths of the graph G. Therefore,
the problem consists in finding a maximal subgraph,
in terms of nodes, such that each node supports a path
that satisfies the regret constraint R. It means that
there exists a path connecting nodes of this subgraph
passing through the arc (o,d) and satisfying one of
the criteria. Such paths are called valid paths. The
problem is formulated as follows:
Input: a graph G = (V, E), an arc (o, d), and a re-
gret constraint R
Output: a maximal subgraph G
0
= (V
0
,E
0
) of G
that each node belongs to a path passing through
the arc (o,d) and satisfying the regret constraint.
The regret constraint R is defined as follows: let
w(i, j) be the weight of the arc (i, j), l
?
(i, j) the length
of the shortest path from i to j, and l(i, j) the length
of a path passing through the arc (o, d). Then, let con-
sider the following regret constraint which is defined
for each criterion:
R
od
(i, j) = l(i, j) ≤ l
?
(i, j) + K (1)
Where K ≥ 0. Each node in the maximal subgraph
G
0
must support at least a valid path satisfying at least
one criterion. The definition of the regret constraint
can appear similar to the notion of upper tolerance
(Shier and Witzgall, 1980). However, it is not the case
since our regret function depends on the given regret
parameter K.
4.2 Properties
The following property is similar to the one saying
that a subpath of the shortest path is also a shortest
path (Ahuja et al., 1993).
Property. The subpath of a valid path is also a valid
path.
l(i, j) ≥ l
?
(i,o) + w(o,d) + l
?
(d, j) (2)
The shortest path satisfies the triangle inequality prop-
erty: following the shortest path from i to o, passing
by the arc (o,d), and then following the shortest path
from d to j, is always a valid path if one exists.
Flight Radius Algorithms
373

Proof.
l
?
(i,o)+w(o,d) + l
?
(d, j) ≤ l
?
(i, j) + K
l
?
(i,o)+w(o,d) + l
?
(d, j) ≤
l
?
(i,o)+l
?
(o, j) + K
w(o,d) + l
?
(d, j) ≤ l
?
(o, j) + K
−→
R
od
( j) = l(o, j) ≤ l
?
(o, j) + K (3)
Where
−→
R refers to outgoing direction. Following
to the inequality 4.2, the subpath from o to j of a valid
path is also valid. In addition, the subpath from i to
d is valid. The proof of the property for incoming
direction
←−
R is symmetric.
Finally, the search can be restricted to the valid
shortest paths starting from o or ending at d. Note
that when K = 0, the set of valid paths represents all
the shortest paths passing by the arc (o,d).
Lemma 1. Any shortest path passing through the arc
(o,d) is also a valid path. Therefore, all its nodes are
supported.
5 ALGORITHMS
In this section, we propose four algorithms. First two
algorithms decompose the FRP in shortest path prob-
lems and solved them in parallel using either the Di-
jkstra or the Bellman algorithm. The third algorithm
extends the Dijkstra algorithm to avoid useless com-
putations. The fourth algorithm extends the Bellman
algorithm to compute all shortest paths for all crite-
ria at once. This last algorithm increases memory re-
quirement since processors access the same memory.
Thus, we propose to combine between sequential and
parallel processing to optimize the runtime and mem-
ory consumption. These algorithms perform parallel
computations when it is possible.
input : a CFN G = (V, E), an arc (o,d), the
criteria C
output: the set of supported nodes S
For sake of simplicity, the algorithm returns the
set of supported nodes and worries about storing the
parents of the supported nodes. In practice, the algo-
rithm also returns the union of the supported trees for
each direction and for each criterion. Based on the
regret functions, let’s define:
R(i,dir) =
(
−→
R
od
(i), if (dir = out)
←−
R
od
(i), if (dir = in)
5.1 Shortest Path Decomposition
The shortest path decomposition solves the FRP
problem by using two shortest path problems, one
from the origin o and the other from the destination
d, for each direction and for each criterion in parallel.
Then supported nodes are computed by checking the
regret constraint.
Algorithm 1: SP Decomposition.
foreach dir ∈ {in, out} in parallel
foreach c ∈ C in parallel
ShortestPaths(o,c,dir);
ShortestPaths(d, c, dir);
foreach i ∈ V do
if R(i,dir) then
S ← S ∪ {i} ;
end
end
end
end
return S
The shortest path subroutine is either Dijkstra or
Bellman algorithm. The computation of the short-
est paths from the origin and from the destination
is sequential for simplifying the search of supported
nodes.
5.2 Flight Radius Algorithms
Here, we design variants of Dijkstra and Bellman al-
gorithm tailored for solving the flight radius problem.
5.2.1 Dijkstra FR Algorithm
We present an algorithm that computes the shortest
path from o, and then computes lazily the shortest
path from d by skipping unsupported nodes (see al-
gorithm 2). Here, the criteria are processed sequen-
tially. At each iteration, the algorithm scans the node
with the minimum weight and then relaxes its neigh-
bors. So, we check if the node satisfies the regret
function otherwise we skip the node. Therefore, we
skip non supported nodes that cannot be extended into
valid paths. The algorithm ends if the queue becomes
empty or all shortest paths to the supported nodes are
found. Function SCAN(i,c,dir) calls the function
presented in 2.2 for each criterion and direction.
ICORES 2019 - 8th International Conference on Operations Research and Enterprise Systems
374

Algorithm 2: Dijkstra FR Algorithm.
foreach dir ∈ {in, out} in parallel
foreach c ∈ C do
Dijkstra(o,c,dir);
enqueue(Q,d);
while Q 6=
/
0 and isNotClosed() do
i ← argmin
j∈Q
(d[ j]);
dequeue(Q,i);
if R(i,dir) then
S ← S ∪ {i} ;
SCAN (i,c,dir);
end
end
end
end
return S
5.2.2 Bellman FR Algorithm
We propose a variant of Bellman algorithm (algorithm
3) that computes at once all shortest paths from the
origin and from destination for all criteria. Then,
more nodes are added to the queue. Here, the SCAN
function updates all paths from the origin and from
the destination for all criteria.
Algorithm 3: Bellman FR Algorithm.
foreach dir ∈ {in, out} in parallel
enqueue (Q,o);
enqueue (Q,d);
while (Q 6=
/
0) do
i ← dequeue(Q);
SCAN (i,C, dir);
end
foreach i ∈ V do
if R(i,dir) then
S ← S ∪ {i} ;
end
end
end
return S
6 EXPERIMENTS
In this section, we evaluate the algorithms to solve
the FRP on real-world datasets. The SP decomposi-
tion algorithms used massive parallelism. However,
the FRP algorithms used more optimization than par-
allelism. In other words, we are especially interested
in comparing the runtime of the algorithms which im-
pacts the user experience of PlanetOptim. Besides,
the number of scanned nodes by the algorithm. This
metric is very important since it determines the ac-
cessed property values (criteria) of a relation. Those
properties are accessed incurs extra IO the first time.
The reason is that properties reside in a separate store
file from the relationships (after that, however, they
are cached) (Robinson et al., 2015). Our experimen-
tal protocol aims to answer the following questions:
Which algorithm is the fastest and, will, therefore pro-
vide the best user experience? Is it worthwhile to de-
sign algorithms for flight radius problem compared to
the decomposition into shortest path problems? Does
reduction of the number of scanned nodes lead to a
reduction of the runtime? How does the performance
evolve with the number of criteria? First, we present
how the benchmarks instances have been generated.
Second, runtime of the algorithms are compared, and
then, the relation between the runtime and the num-
ber of scanned nodes is studied. Last, we analyze the
ratio of the flight radius algorithms over shortest path
decompositions depending on the number of criteria.
All the experiments were led on a computer running
on Ubuntu 16.04.5 with 32 GB of RAM and one In-
tel Core i7-3930K 3.20GHz processor (6 cores). The
implementation is based on Neo4j and APOC version
3.2.0. All algorithms are implemented in Java 8.
6.1 Instances Generation
The CFN contains historical data for the years 2016
and 2017 (24 year-months). Each year-month corre-
sponds to a different graph. The condensed flight net-
work contains 13,732 nodes and 1,148,303 arcs. A
benchmark instance must specify the year-month, the
OD-pair (o,d), the number of criteria, and their re-
grets.
The number of criteria is one (time), two (time, dis-
tance), or three (time, distance, cost). For each crite-
rion, two values are considered for its regret K: 0 and
the median (over all relations and year-months). The
value 0 means that only shortest paths passing through
the arc (o, d) are valid, whereas many other paths are
valid with the median. For instance, the median dura-
tion of a flight is approximately two hours. So a path
between i and j passing through the arc (o, d) is valid
if it does not exceed the duration of the shortest path
between i and j by four hours (the median duration
plus the minimum connection time).
For each year-month, each number of criteria, and
each combination of criteria values, a few pairs of
origin and destination (o, d) are drawn randomly. At
the end, more than ten thousand instances have been
tested.
Flight Radius Algorithms
375

Table 1: Distribution of runtimes in milliseconds.
SP Decomposition FR Algorithm
Dijkstra Bellman Dijkstra Bellman
avg 266 500 231 604
std 60 198 90 282
max 418 1328 644 1612
6.2 Algorithms Comparison
Table 1 gives the average, standard deviation, and
maximum runtime in milliseconds of the shortest path
decompositions and of the flight radius algorithms us-
ing Bellman or Dijkstra. The Dijkstra variants are ap-
proximately two times faster and have a lower stan-
dard deviation than their Bellman counterparts. The
algorithm based on Dijkstra is slightly faster than the
decomposition whereas it is not the case for Bellman.
Figure 3 analyzes the relation between the run-
time and the number of scanned nodes for each al-
gorithm. Each point represents one instance and its
x-coordinate is the runtime in milliseconds, whereas
its y-coordinate is the number of scanned nodes. The
color of a point indicates which algorithm solved the
instance. The flight radius algorithm based on Bell-
man scans fewer nodes than the shortest path decom-
position based on Bellman (red points are below the
blue ones), but without reducing the runtimes (blue
points are on the left of the red ones).
It means that the additional time spent to read all
properties is not compensated by the decrease in the
number of scanned nodes. For Dijkstra, the number
of scanned nodes for the decomposition only depends
on the number of criteria whereas it is not the case
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
1e+05
2e+05
400 800 1200 1600
Runtime
ScanCount
Algorithm
●
FR Bellman FR Dijkstra SP Bellman SP Dijkstra
Figure 3: Analysis of the runtimes and scan counts.
Table 2: Improvements of the FR algorithms over the SP
decompositions.
Dijkstra Bellman
#Criteria Runtime #Scans Runtime #Scans
1 0.69 0.57 1.04 0.81
2 0.79 0.41 1.15 0.57
3 1.09 0.43 1.37 0.49
for the flight radius algorithm. In this case, a lower
number of scanned nodes implies a reduction of the
runtime because the number of red properties is also
reduced (green points are on the left and below purple
points). As expected, Dijkstra based algorithms scan
fewer nodes than those based on Bellman.
Last, Table 2 gives the geometric mean of the im-
provements provided by FR algorithms over the SP
decompositions in terms of runtimes and number of
scanned nodes. The improvement is the ratio of the
runtime of FR algorithm over the SP decomposition
for Bellman or Dijkstra. The improvement is lower
than 1 if the FR algorithm is better than the SP de-
composition and greater than 1 otherwise. Both FR
algorithms based on Dijkstra or Bellman reduce the
number of scanned nodes and the reduction increases
with the number of criteria. The runtimes are not re-
duced for Bellman, but are also reduced for Dijkstra
when the number of criteria is one or two. When there
are three criteria, the reduction of scanned nodes does
not compensate for the additional parallelization of
the decomposition.
To conclude, FR algorithm based on Dijkstra is
the most efficient, and satisfies the real-time con-
straint of PlanetOptim. Besides, the runtimes of
the algorithms increase with the number of criteria in
spite of the parallelization. When there are three cri-
teria, the reduction of the number of scanned nodes
does not help to reduce the runtimes of FR algorithm
based on Dijkstra, a perspective is to parallelize along
the criteria.
7 CONCLUSION
This work presents some algorithms for solving the
FRP on the CFN. The problem was formulated as
finding a maximal subgraph, in terms of nodes, such
that each node supports a path satisfying a regret con-
straint. This constraint is used to model passengers
preferences: time, cost, or distance. We propose four
algorithms based on SPA to solve the FRP. These al-
gorithms combine sequential and parallel processing
to overcome time and memory costs. We are working
on an industrial context: the CFN is generated from
ICORES 2019 - 8th International Conference on Operations Research and Enterprise Systems
376

a Milanamos database and stored in a graph database.
Implementing SPA in graph databases is challenging
since accessing to properties files, where criteria in-
formation are stored, is costly. This is the important
difference between graph theory and graph database.
Then, two metrics are used to evaluate algorithm’s
performances: runtime and number of scanned nodes.
The last one metric evaluates the number of properties
file access. Experiments show that the FR algorithm
based on Dijkstra is the most efficient, and satisfies
the real-time constraint of PlanetOptim. The next
step of the study is to include QSI models to speed up
computations. Latter, our solution will be integrated
in the industrial application PlanetOptim.
ACKNOWLEDGMENTS
We would like to thank Carine F
´
ed
`
ele for her insight-
ful comments on the paper, as these comments led us
to an improvement of the work.
REFERENCES
Ahuja, R. K., Magnanti, T. L., and Orlin, J. B. (1993).
Network flows: theory, algorithms, and applications.
Prentice hall.
Cherkassky, B. V., Goldberg, A. V., and Radzik, T. (1996).
Shortest paths algorithms: Theory and experimental
evaluation. Mathematical programming, 73(2):129–
174.
Delling, D., Pajor, T., Wagner, D., and Zaroliagis, C. (2009).
Efficient Route Planning in Flight Networks. ATMOS,
12.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numer. Math., 1(1):269–271.
Jacobs, T. L., Garrow, L. A., Lohatepanont, M., Koppel-
man, F. S., Coldren, G. M., and Purnomo, H. (2012).
Airline planning and schedule development. In Quan-
titative Problem Solving Methods in the Airline Indus-
try, pages 35–99. Springer.
Miler, M., Medak, D., and Odoba
ˇ
si
´
c, D. (2014). The short-
est path algorithm performance comparison in graph
and relational database on a transportation network.
Promet-Traffic&Transportation, 26(1):75–82.
Neo Technology (2017). Neo4j. https://www.neo4j.
com.
Robinson, I., Webber, J., and Eifrem, E. (2015). Graph
databases: new opportunities for connected data. ”
O’Reilly Media, Inc.”.
Shier, D. R. and Witzgall, C. (1980). Arc tolerances in
shortest path and network flow problems. Networks,
10(4):277–291.
Flight Radius Algorithms
377
