
Stochastic Phase Estimation and Unwrapping
Mara Pistellato, Filippo Bergamasco, Andrea Albarelli, Luca Cosmo, Andrea Gasparetto
and Andrea Torsello
DAIS, Ca’Foscari University of Venice, Via Torino 155, Venice, Italy
Keywords:
Phase Shift, Structured Light, 3D Reconstruction.
Abstract:
Phase-shift is one of the most effective techniques in 3D structured-light scanning for its accuracy and noise
resilience. However, the periodic nature of the signal causes a spatial ambiguity when the fringe periods are
shorter than the projector resolution. To solve this, many techniques exploit multiple combined signals to
unwrap the phases and thus recovering a unique consistent code. In this paper, we study the phase estima-
tion and unwrapping problem in a stochastic context. Assuming the acquired fringe signal to be affected by
additive white Gaussian noise, we start by modelling each estimated phase as a zero-mean Wrapped Normal
distribution with variance
¯
σ
2
. Then, our contributions are twofolds. First, we show how to recover the best
projector code given multiple phase observations by means of a ML estimation over the combined fringe dis-
tributions. Second, we exploit the Cram
´
er-Rao bounds to relate the phase variance
¯
σ
2
to the variance of the
observed signal, that can be easily estimated online during the fringe acquisition. An extensive set of experi-
ments demonstrate that our approach outperforms other methods in terms of code recovery accuracy and ratio
of faulty unwrappings.
1 INTRODUCTION
The recent evolution of increasingly affordable and
powerful 3D sensors and the consolidation of fast re-
construction algorithms enabled the widespread adop-
tion of 3D data in both consumer (Han et al., 2013)
and industrial (Luhmann, 2010) off-the-shelf devices.
As a consequence of the resulting increase of general
interest in the subject, 3D data capturing and process-
ing has become a trending topic in recent Computer
Vision research. The richness of information coming
from 3D data have been exploited in several fields of
application, from industrial inspection systems (Luh-
mann, 2010), robot and machine vision (Prez et al.,
2016), pipe inspection (Bergamasco et al., 2012),
medical (Cheah et al., 2003; Tikuisis et al., 2001; Pel-
lot et al., 1994) and entertainment applications (Han
et al., 2013; Winterhalter et al., 2015).
While consumer applications place more empha-
sis on speed and performance, in an industrial setup
accuracy is of greater importance. To this end, a lot of
effort has been put in reconstruction techniques trad-
ing design simplicity and speed for higher precision
in 3D recovery and robustness to surface character-
istics of captured objects. A wide range of different
techniques have been proposed over the last decades.
Different approaches can be usually categorized
on the basis of the exploited physical principle and
on the design of the adopted sensor. For instance, a
time-of-flight setup combines a pulsating light emit-
ter with a sensor which measures the round-trip time
of the signal. Then, given the distance between the
sensor and the artifact, a depth map can be com-
puted and used for reconstruction (Lange and Seitz,
2001). Despite this technology have been proven re-
liable in some specific application, it suffers from
two major drawbacks. First, the sensor does not
usually provide a high resolution response. More-
over, it is particularly sensitive to signal interfer-
ences and surface response (i.e. artifact material).
For these reasons, when resolution is of greater im-
portance, triangulation-based approaches, especially
when paired with high-end hardware, proper sen-
sor calibration and advanced signal processing tech-
niques, are better suited. Among the approaches,
passive 3D sensing ones employ different cameras
which are used to capture artifact’s images at differ-
ent angles in order to triangulate the single material
points whose projection on the different images has
been matched on the basis of purely photometric in-
formation. Differently, active 3D sensing technology
exploits the projection of some structured pattern of
known spatio-temporal structure onto the object, and
recovers depth information by means of triangulation
200
Pistellato, M., Bergamasco, F., Albarelli, A., Cosmo, L., Gasparetto, A. and Torsello, A.
Stochastic Phase Estimation and Unwrapping.
DOI: 10.5220/0007389402000209
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 200-209
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

0 10 20 30 40 50 60
t
0
0.5
1
1.5
2
Intensity
Model
Acquired Signal
Figure 1: Left: Vertical sinusoidal pattern with a period length of 17 px. The pattern is shifted from right to left so that each
pixel observe one complete period after m samples. Center: The recovered phase for each pixel. Since the period is shorter
than the with of the projected image, we observe a phase ambiguity among the fringes. Right: Real-world example of the
acquired signal compared to the projected ideal signal for a pixel with phase 0. Note how the samples are slightly noisy
especially in the lower portion of the sine period.
between the rays emitted by the pattern projector and
the corresponding image points, matched by means
of signal decoding. Digital projector-based structured
light is an example of such approaches. The main idea
behind this technique is to decode from the image the
corresponding projector coordinates (in pixels) to es-
tablish a map between the observed scene and the pro-
jector itself (camera-projector setup) or between dif-
ferent acquisitions of the scene (multi camera setup).
In this paper we will not deal with the triangulation or
matching problems, rather we will focus on the accu-
rate recovery and decoding of the projected signal.
In literature, several different coding strategies
have been proposed, each with a specific goal in
mind. For instance, some approaches (der Jeught
and Dirckx, 2016) allow to use a reduced number of
patterns in order to increase the speed of the recon-
struction and to enable real time operations. Other
methods attain high speed by exploiting the inter-
action between the projected signal and the natu-
ral texture appearing in the scene (Vo et al., 2016).
In (Fanello et al., 2016), the authors propose to in-
fer the depth from the signal itself using a learning
technique, dropping the actual triangulation step. De-
spite the abundance of recent specialized techniques,
the most popular one is the long standing phase shift
method (Srinivasan et al., 1984). This is particularly
true in the industrial setting, since this approach al-
lows high accuracy, resilience to noise and surface
texture and great flexibility. The basic idea underly-
ing phase-shift is indeed quite simple. The projected
patterns are sine wave intensity frames which are pe-
riodic along one direction of the digital projector frus-
tum. Several patterns, with different shift in the sig-
nal phase, are projected and retrieved over time, then
the initial phase (i.e. the phase at frame 0) is recon-
structed for each image pixel by means of convolu-
tion. Unfortunately, due to the periodic nature of the
pattern in space, many pixels will be characterized
by the same initial phase, thus a disambiguation step
must be employed. This step takes the name of phase
unwrapping.
The method introduced in this paper deals with
both the phase recovery and unwrapping problems at
once by casting them in a stochastic context. We as-
sume that the acquired fringe signal is affected by ad-
ditive white Gaussian noise so that we can model each
estimated phase as a zero-mean Wrapped Normal dis-
tribution with variance
¯
σ
2
. We recover the most likely
projector code, given multiple phase observations, by
means of a ML estimation over the combined fringe
distributions. Additionally, we exploit the Cram
´
er-
Rao bounds to relate the phase variance
¯
σ
2
to the vari-
ance of the observed signal, that can be easily esti-
mated online during the fringe acquisition. The valid-
ity of the assumptions and the effectiveness of our ap-
proach are then tested thoroughly with both real and
synthetic experiments.
2 PHASE SHIFT
Phase-shift technique consists in generating a sinu-
soidal pattern spanning either the horizontal or verti-
cal extent of the projector image plane (Fig. 1, Left).
During the acquisition, the pattern is spatially shifted
so that each projector pixel encompasses an entire pe-
riod after m subsequent shifts. Together with m, the
period length λ (measured in pixels) of the sine pat-
tern is chosen a-priori. It affects both the phase differ-
ence of two neighbouring pixels along with the spa-
tial ambiguity of all pixels in the image. Indeed, two
adjacent pixels will exhibit a phase-difference of
2π
λ
.
Consequently, points which are λ pixels away will be
characterized by the same phase value.
The choice of λ is driven by two opposing needs.
On one hand, a longer period will reduce the phase
ambiguity along the image, with the extreme case of
λ larger than the projector size causing no ambiguity
at all. On the other hand, it is well known that the
phase localization of the signal is proportional to the
frequency, so we need to keep it small to increase the
Stochastic Phase Estimation and Unwrapping
201

accuracy. Usually, λ is kept in the order of dozens
of pixels (Fig. 1, Center) and an unwrapping step is
used to distinguish different fringes. The disambigua-
tion technique is based on the idea of projecting mul-
tiple different sinusoidal signals (at different periods
λ
1
...λ
n
) that can be combined to get a unique code
for each projector’s pixel.
The problem of the aforementioned multi-phase
shift approach is that the signal acquired by the cam-
era is perturbed by different noise sources, causing an
imperfect phase estimation. Possible sources are, for
example: (I) The thermic white noise of the camera,
especially at high gains or very short exposure times;
(II) The non-linear interactions between neighbour-
ing pixels due to intrinsic properties of each mate-
rial (micro-facets and reflections causing a wrong sig-
nal response); (III) An imperfect mechanical and/or
electronic functioning of the projecting device (par-
ticularly true for laser projectors), (IV) External noise
sources like indoor ambient lighting subject to the os-
cillatory nature of the power outlet. Whatever the rea-
son, a noisy phase estimation affects not only the ac-
curacy of the reconstructed surface, but may cause a
completely wrong phase unwrapping. Indeed, meth-
ods not particularly tolerant to phase errors produce a
lot of erroneous codes for challenging materials, like
brushed metals or glossy plastic.
2.1 Signal Model
Before describing our method, we start by formaliz-
ing the mathematical details of the projected signal
and the corresponding noise model.
For any projector pixel P at coordinates (ξ,v), we
project over time the following sinusoidal signal, dis-
cretized as a sequence of m subsequent samples:
Z(t) = sin
2π
t
m
+ φ
P
, t = [0 ...m). (1)
Assuming a vertical pattern, the ideal pixel phase φ
P
depends both on the period λ and its horizontal po-
sition on the image plane, according to the following
simple relation:
φ
P
= 2π
ξ
λ
−
ξ
λ
. (2)
The value of φ
P
cannot be measured directly, but
it can be estimated from observed samples. Such val-
ues are subject to different noise sources affecting
the acquisition process. As commonly performed in
signal theory applications (Rife and Boorstyn, 1974;
Macleod, 1998), we derive our observation model as-
suming to acquire a set of noisy samples:
z(t) = sin
2π
t
m
+ φ
P
+ w[t] (3)
where w[t] is a zero-mean white Gaussian noise of
variance σ
2
. Albeit not completely motivated by
physical considerations, the assumption we made on
the statistical nature of the noise represents a good
trade-off between the simplicity of the model and the
observed behaviour. Such convenience is supported
by our experimental evidence (see Sec. 4 for details).
Given the acquired signal z, the Maximum Likeli-
hood estimator of the phase is defined as:
ˆ
φ
P
= argmax
φ
P
p(φ
P
;z) (4)
where, considering our assumption on the statistical
nature of the noise, we have:
p(φ
P
;z) =
1
σ(2π)
m/2
e
−
1
2σ
2
∑
m−1
t=0
z(t)−sin(2π
t
m
+φ
P
)
2
.
(5)
Switching to the natural logarithm of the likeli-
hood and arranging the terms, we obtain the common
non-linear least-squares minimization:
ˆ
φ
P
(z) = argmin
φ
P
m−1
∑
t=0
z(t) −sin
2π
t
m
+ φ
P
2
.
(6)
Since the least squares best fit based of a lower
order Fourier series is exactly equivalent to the trun-
cated DFT, the phase of the acquired single-tone sig-
nal can be easily recovered as:
ˆ
φ
P
(z) = atan
2
(x,y) + π (7)
with
x =
m−1
∑
i=0
cos
2π
m
i
z(i); y =
m−1
∑
i=0
sin
2π
m
i
z(i)
and where atan
2
: R
2
→ [−π,π] evaluates the cor-
rect arctangent angle of x/y selecting the appropriate
quadrant based on the arguments signs.
2.2 Stochastic Code Estimation
After the estimation of the phase of projected signal,
our final goal is to recover the pixel horizontal (or
vertical) coordinate ξ, usually referred as “projector
code”. To simplify the notation, let ϕ(P) =
φ(P)
2π
be
the fractional part inside each projected fringe. In the
typical case when λ is less than the projector’s width
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
202

ξ
max
, we observe multiple fringes along the image.
Such stripes can be sequentially enumerated follow-
ing the ordering induced by the projector’s pixel grid.
The fringe number associated to each coordinate ξ can
be simply computed as:
η(ξ) =
ξ
λ
∈ N (8)
so that each projector coordinate can be expressed in
terms of the normalized phase and fringe number as:
ξ = (η(ξ) + ϕ(ξ))λ. (9)
Values of ϕ(ξ) are recovered as in (7), while λ is
the constant value of the chosen period length. Thus,
η(ξ) is the only element that allows us to disam-
biguate among points with the same observed phase.
Similarly to other multi-phase approaches, we use
n sinusoidal patterns with different co-prime period
lengths λ
1
.. .λ
n
to disambiguate the fringes. In this
setting, for each pixel P we estimate a sequence of n
normalized phases ˆϕ = (
ˆ
ϕ
1
.. .
ˆ
ϕ
n
) using the ML es-
timator shown in (6). Therefore, each
ˆ
ϕ
i
is a sam-
ple from a random variable which we consider dis-
tributed as a Wrapped Normal of support [0,1], un-
known mean ϕ
i
and variance
¯
σ
i
2
:
ˆ
ϕ
i
∼ N
w
(ϕ
i
,
¯
σ
i
2
). (10)
Note that, with a slight abuse of notation, with
¯
σ
i
,i = 1 . .. n we denote the standard deviation of the
random variable associated to the estimated phase of
period λ
i
(eq. 10), while with σ we express the stan-
dard deviation of w[t], which is not related to the pe-
riod length but only to the signal-to-noise ratio of the
physical device. Albeit being different, the two stan-
dard deviations are related as described in Section 3.
Since
¯
σ
i
is in general very small, we can approxi-
mate the Wrapped Normal efficiently with a standard
Gaussian distribution (Kurz et al., 2014).
Therefore we can express the Probability Density
Function relative to the observed phase in the i
th
pat-
tern as:
p
ϕ
i
(
ˆ
ϕ
i
;ϕ
i
,
¯
σ
i
) =
1
√
2π
¯
σ
i
e
−
d
c
(
ˆ
ϕ
i
,ϕ
i
)
2
2
¯
σ
i
2
(11)
where d
c
is the signed circular distance (defined in the
range [−0.5,0.5]) of two normalized phases:
d
c
(ϕ
1
,ϕ
2
) = sign(ϕ
1
−ϕ
2
)min{|ϕ
1
−ϕ
2
|,1−|ϕ
1
−ϕ
2
|}
The PDF in (11) expresses the probability of ob-
serving a certain phase
ˆ
ϕ
i
given the true (unknown)
projected phase ϕ
i
and the standard deviation on the
phase observation
¯
σ
i
.
Since the projected phase ϕ
i
is uniquely identified
by the projector code ξ through equation (2), we can
rewrite (11) in the following way:
p
ξ
i
(
ˆ
ϕ
i
;ξ,
¯
σ
i
) =
1
√
2π
¯
σ
i
e
−
d
c
ˆ
ϕ
i
,
ξ
λ
i
−
ξ
λ
i
2
2
¯
σ
i
2
(12)
This time, p
ξ
i
models the probability of observing a
certain phase
ˆ
ϕ
i
at a specific projector location ξ.
When looking at all the n observed phases to-
gether, we can consider the components of vector ˆϕ
as independent samples drawn from distribution (10)
with means ϕ = (ϕ
1
.. .ϕ
n
) and fixed standard devia-
tions ¯σ = (
¯
σ
1
.. .
¯
σ
n
). Similarly to what we did before
with the signal, we consider ξ as a parameter and de-
fine the likelihood function describing the plausibility
of observing a projector code ξ given the estimated ˆϕ
and a pre-defined ¯σ as
L (ξ; ˆϕ, ¯σ) =
n
∏
i=1
p
ξ
i
(ξ;
ˆ
ϕ
i
,
¯
σ
i
)
=
n
∏
i=1
1
¯
σ
i
√
2π
e
−
d
c
ˆ
ϕ
i
,
ξ
λ
i
−
ξ
λ
i
2
2
¯
σ
i
2
(13)
Given phase values estimated from the acquired
signal, we can compute the code that most likely gen-
erated such phases by maximizing the Likelihood
ˆ
ξ = argmax
ξ∈[0,ξ
max
)
L (ξ; ˆϕ, ¯σ) (14)
2.3 Our Proposed Method
Following the theoretical discussion made so far, we
now summarize our proposed stochastic code recov-
ery approach. Before starting the acquisition, one
must choose how many periods to project and their
period length in pixels.
To avoid ambiguity along the projector’s codes
space, all period lengths must be co-prime and their
LCM smaller than the projector width (or height, if
we project horizontal patterns). Moreover, one must
specify the expected standard deviations of estimated
phases, i.e. the vector ¯σ.
It is worth spending a couple of words here, be-
cause ¯σ is in fact the only required parameter of our
algorithm. First, we formulated the solution assuming
a possibly different
¯
σ
i
for each projected period. This
accounts the fact that, for the microscopic character-
istics of the surface, different sine frequencies may
exhibit different signal noises. Moreover, longer peri-
ods are less localizable in space, so it is a good prac-
tice to use more samples m for long periods than for
Stochastic Phase Estimation and Unwrapping
203

the short ones. Second, this approach allows us to not
exclude a-priori any value of the estimated ˆϕ. Indeed,
the vector ¯σ is essentially a weight acting on all the
acquired patterns. One may choose to keep extremely
short or long periods, or to use very few samples, and
modify the values of the relative
¯
σ
i
accordingly.
This is an important aspect when we compare this
method with other unwrapping techniques. Indeed,
approaches like (Lilienblum and Michaelis, 2007) fail
when facing noisy observations. We prefer to accept
such values and compute the best possible code rather
than having no code at all. Our goal, in fact, is to
exploit measured phases in the best possible way.
Once ¯σ is chosen and the n sinusoidal patterns
(one for each period) are acquired, for each pixel
of the camera we estimate the phases
ˆ
ϕ
1
.. .
ˆ
ϕ
n
using
equation (7).
At this point, for each camera pixel, we search
for an initial integer estimate of the projector code
by taking the value of
˙
ξ ∈ {0,1,...ξ
max
} for which
L (
˙
ξ; ˆϕ, ¯σ) is maximum. Due to the different spatial
resolution between camera and projector, it is unlikely
that each camera pixel observe exactly one projector
pixel. Indeed, one of the strengths of phase-shifting is
that one can precisely recover the projector coordinate
with sub-pixel precision.
In other words, the code
ˆ
ξ that maximizes the
Likelihood can assume any real value between 0 and
ξ
max
.
Unfortunately, due to the signed circular distance,
we cannot give a direct analytical solution for the
global maximum
ˆ
ξ. However, if we restrict the search
in a small neighborhood of
˙
ξ so that the circular dis-
tance never wraps, and take the logarithm of the Like-
lihood, L(ξ; ˆϕ, ¯σ) becomes a parabola for which we
can compute the maximum by sampling three distinct
points on it.
Therefore, once we identified the integer part of
the projector code
˙
ξ, we recover the sub-pixel maxi-
mum
ˆ
ξ with the following formula:
ˆ
ξ =
L (
˙
ξ + 1; ˆϕ, ¯σ) −L (
˙
ξ −1; ˆϕ, ¯σ)
4L (
˙
ξ; ˆϕ, ¯σ) −2
L (
˙
ξ + 1; ˆϕ, ¯σ) + L (
˙
ξ −1; ˆϕ, ¯σ)
(15)
3 ¯σ LOWER-BOUNDS
Now that we described the general algorithm, we still
need to clarify how to provide reasonable values for
the vector ¯σ.
One simple way is to empirically measure the
phase error on a set of repeated experiments and com-
pute its standard deviation.
There are two drawbacks in this approach. First,
this sort of ”calibration” must be performed every
time a new object is acquired or any other condition
changes the expected signal-to-noise ratio of acquired
sinusoids. Second, the operation cannot be performed
along with the acquisition because the exact phase of
each acquired signal is not known, as it depends on
the scene geometry.
To overcome that, the only way is to project the
same known phase for all the projector pixels (essen-
tially setting λ = 1) to collect statistics on its distri-
bution. Unfortunately, this special pattern is useless
for 3D reconstruction so it will just consume projector
time to calibrate the parameter needed for our method.
Instead of directly calibrate ¯σ, we can empirically
measure the variance of the signal noise w[t] and re-
late it to the variance of the phase estimator.
Since φ
P
is an unknown deterministic parameter
of some probability function via the unbiased estima-
tor
ˆ
φ
P
, the variance of the estimator is subject to the
Cram
´
er-Rao bound:
var(
ˆ
φ
P
) ≥
1
J(φ
P
)
(16)
where J(φ
P
) is the Fisher information defined as:
J(φ
P
) = E
∂ln p(z; φ
P
)
∂φ
P
2
= −E
∂
2
ln p(z; φ
P
)
∂
2
φ
P
(17)
By substituting (5) in (17) we obtain:
ln p(z;φ
P
) = ln
1
σ(2π)
m/2
−
1
2σ
2
m−1
∑
t=0
z(t) −sin
2π
t
m
+ φ
P
2
(18)
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
204

∂
2
ln p(z;φ
P
)
∂
2
φ
P
= −2K
m−1
∑
t=0
cos
2
2π
t
m
+ φ
P
−
m−1
∑
t=0
sin
2
2π
t
m
+ φ
P
+
m−1
∑
t=0
sin
2π
t
m
+ φ
P
z(t)
E
∂
2
ln p(z;φ
P
)
∂
2
φ
P
= −2K
1
m−1
∑
t=0
cos
2
2π
t
m
+ φ
P
−
m−1
∑
t=0
sin
2
2π
t
m
+ φ
P
+
m−1
∑
t=0
sin
2π
t
m
+ φ
P
E[z(t)]
(19)
where K = −
1
2σ
2
. Since
E[z(t)] = sin
2π
t
m
+ φ
P
+ E[w[t]] (20)
and E[w[t]] = 0 by definition, we obtain:
E
∂
2
ln p(z; φ
P
)
∂
2
φ
P
= −2K
m−1
∑
t=0
cos
2
2π
t
m
+ φ
P
var(
ˆ
φ
P
) ≥
σ
2
∑
m−1
t=0
cos
2
2π
t
m
+ φ
P
(21)
Equation (21) states that the variance of our phase
estimator must be greater than a value proportional
to the variance of the Gaussian white noise σ
2
and
inversely proportional to the number of samples m.
Indeed, since cos
2
(x) ≤ 1, we have:
m−1
∑
t=0
cos
2
(2π
t
m
+ φ
P
) ≤ m. (22)
This makes sense, as we expect to reduce the es-
timation error either by acquiring more samples or by
increasing the signal-to-noise ratio. With this new for-
mulation, the value of σ can be empirically estimated
online with the acquisition of the sinusoids, just by
computing the observation errors with respect to our
ideal projected pattern.
Even if we did not solved the problem completely,
we experimentally observed that the empirically esti-
mated phase standard deviation is actually very close
to the theoretical lower-bound (21). Hence, by just us-
ing a value of ¯σ equal to the lower bound, we almost
always obtain satisfactory results.
4 EXPERIMENTAL EVALUATION
We designed a set of synthetic and real-world exper-
iments to verify the correctness of the assumptions
we made in the previous sections and to compare our
method with other multi phase-shift approaches.
The real-world experiments were performed with
a structured-light scanner developed in our lab. The
device is composed by a single MatrixVision Blue-
Fox3 5Mpix camera and an LG projector with a res-
olution of 1920 ×1080 px. Camera and projector rel-
ative pose was calibrated using the fiducial markers
descried in (Bergamasco et al., 2011). We manu-
ally corrected the projector gamma to obtain a cam-
era signal response as linear as possible. Once cal-
ibrated, the defined gamma settings remained un-
changed throughout the experiments.
4.1 Phase and Signal Standard
Deviation
We performed a first set of experiments to assess the
validity of our statistical noise model on a real scene.
We considered three different kinds of planar sur-
faces, namely: matte white plastic, a brushed alu-
minum metal sheet and a dark coloured cardboard.
The goal is to compare the acquired signal standard
deviation σ with the standard deviation of the phase
estimator
¯
σ
i
. To do that, we generated a pattern com-
posed by a variable number of samples m with a pe-
riod equal to one. This way, each pixel P in a scene
observed exactly the same true phase φ
P
= 0, allow-
ing us to empirically estimate the standard deviation
of the phase error among pixels. Similarly, by know-
ing the phase, we computed the error of acquired sig-
nal with respect to the projected ideal sinusoid. In
this way we can test if our zero-mean white Gaussian
noise assumption is supported by experimental evi-
dence.
In Figure 2 we show the results of this experiment
for the three different materials. On the top row we
plotted the histogram of the error of raw acquired sig-
nal for a sinusoidal pattern composed by m = 60 sam-
ples.
In all cases, the signal was analyzed by collecting
the errors in a ROI of size 400 ×300 pixels selected
to cover the central region of the projected area. We
can see that the empirical distributions follow quite
well our supposed Gaussian model with a mean close
to zero. Especially for the cardboard material, we re-
port a little positive bias that we guess is caused by
blooming effect. In fact, blooming clearly bias the
acquired intensity by always overshooting the actual
value. Nevertheless, we think that the proposed as-
Stochastic Phase Estimation and Unwrapping
205

-0.3 -0.2 -0.1 0 0.1 0.2
Error
0
2
4
6
8
10
12
x 10
5
White Matte Plastic
-0.3 -0.2 -0.1 0 0.1 0.2
Error
0
2
4
6
8
10
12
x 10
5
Metal
-0.3 -0.2 -0.1 0 0.1 0.2
Error
0
2
4
6
8
10
x 10
5
Dark Cardboard
10 20 30 40 50 60
Samples
2
4
6
8
10
12
14
16
std (rad)
x 10
-3
Measured Phase std
CR Lower Bound
10 20 30 40 50 60
Samples
2
4
6
8
10
12
14
16
std (rad)
x 10
-3
Measured Phase std
CR Lower Bound
10 20 30 40 50 60
Samples
2
4
6
8
10
12
14
16
std (rad)
x 10
-3
Measured Phase std
CR Lower Bound
Figure 2: Relation between the acquired signal distribution and standard deviation σ (top row) with the theoretical lower-
bound and the empirical phase standard deviation ¯σ (bottom row) for the three different chosen materials.
sumptions are fair enough to approximate the real be-
haviour of the phenomenon. For each material, we
computed the empirical standard deviation σ (from
the m = 60 samples case) to compute the lower-bound
according to (21).
In the second row of Figure 2 we plotted both
the lower-bound and the empirically measured phase
standard deviation varying the number of samples m
for the three different materials. As expected, the em-
pirical standard deviation of the estimated phase is
proportional with the standard deviation of the sig-
nal. In fact, the white matte plastic exhibits a lower
error due to its nearly Lambertian nature. Metal sheet
is more noisy due to small reflections and dark card-
board is the worst since the low albedo is heavily de-
creasing the signal-to-noise ratio. In all the cases the
estimated phase standard deviation is slightly above
the theoretical lower bound computed from the sig-
nal. This validates our claim that the given bound can
be effectively used to give a good estimation of the
unknown ¯σ.
4.2 Code Estimation Comparisons
We performed a set of synthetically generated tests to
compare the code recovery accuracy of our method
with respect to a famous multi-phase shift approach
proposed by Lilienblum and Michaelis (Lilienblum
and Michaelis, 2007) and a single phase-shift ap-
proach using Graycoding to disambiguate the fringes
and just one periodic pattern to obtain the code.
In all tests we generated 3 patterns with λ
1
= 17,
λ
2
= 23 and λ
3
= 27 pixels and simulated a 1920 ×
1080 pixels projector. Then we additively perturbed
the synthetic phases of each pixel with a zero-mean
Gaussian with different standard deviations. For each
experiment we recovered the projector codes with the
different methods and compute the RMS with respect
to the ground truth.
In the first row of Fig.3 we plotted the compar-
ison as RMS and percentage of outlier codes. For
both methods, we considered a pixel as outlier if the
distance wrt. the ground-truth was greater than half
the minimum period length. From this test we can
observe how our method consistently provides lower
code RMS, less variability in the estimation and a
lower number of outliers.
In the case of single phase-shift disambiguated
with Graycoding (Fig.3, second Row), we observe
how the recovered codes are less accurate than the
multi-phase approach as we consider only a single
pattern (and hence the output coding error is almost
linearly related to the amount of phase perturbation
introduced). The outlier ratio is consistently lower
than the multi phase-shift approaches as we assumed
that the Graycoding technique never fails to disam-
biguate the correct fringe. Nevertheless, the good in-
lier ratio does not justify its adoption for the higher
overall RMS exhibited.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
206

Figure 3: Comparison of our approach with respect to (Lilienblum and Michaelis, 2007) (top row) and single phase-shift
disambiguated with Graycoding (bottom row). First and second column show respectively the coding RMS and the code
outlier percentage varying the input phase error σ.
4.3 Projector Delay Recovery
One of the key strengths of our method is the re-
silience against noisy phase estimations. To demon-
strate that, we tested the approach with the challeng-
ing task of recovery the correct code even if the pro-
jector and camera are not synchronized.
This can be useful in practice because ensuring a
proper synchronization of the camera frames with the
projected patterns usually requires a custom electron-
ics that increases the cost and complexity of the scan-
ner.
For simplicity, we assumed that the exposure time
of the camera is far lower than the display time of each
projected pattern. This way, all the acquired samples
z(t) are affected by a fixed unknown integer shift but
the camera never acquires in-between two projector
frames.
We generated a synthetic 3-periods signal com-
posed by m = 60 samples (as in previous experiments)
perturbed with a variable zero-mean noise with vari-
ance σ
2
. Then, we shifted all the patterns by a random
shift 0 ≤ k ≤ m. Afterwards, we run our method for
each possible circular shift k of the signal collecting,
for each pixel, the value of the maximum likelihood
obtained. Pixel wise, we compared all the maximum
likelihood values to select the shift corresponding to
the higher one. The result is that each pixel votes for
the shift producing the higher maximum likelihood of
the codes.
Since the data was synthetically generated, we
marked as inliers all the pixels that actually voted
for the correct shift and plotted the inlier percentage
against the noise in Fig.5.
The experiment shows an inlier percentage greater
than 50% (sufficient to correctly recover the unknown
shift) for input signal noise std. up to 0.45, which is
more than 5 times the noise levels we measured for
all the three different materials in Fig.2. Therefore,
we are confident that in the vast majority of real world
cases the synchronization may be avoided with no se-
vere consequence on the unwrapping result.
4.4 Qualitative Evaluation
Finally, we qualitatively evaluated the 3D triangu-
lated meshes obtained both with our proposed method
and the number-theoretical approach (Lilienblum and
Michaelis, 2007).
In Fig.4 we show the range-maps obtained while
reconstructing a metallic kitchen sink (top row) and
a matte chalk bas-relief (bottom). As pre-processing,
before triangulation we just filtered all the codes with
a value outside the range 0. .. ξ
max
.
Especially in the more challenging metallic ob-
ject, our method provides a denser and less noisy re-
construction. In the optimal scenario of the Lamber-
tian white artefact, our method outperforms (Lilien-
blum and Michaelis, 2007) in high curvature regions
where self-reflections usually lead to higher coding
errors.
Stochastic Phase Estimation and Unwrapping
207
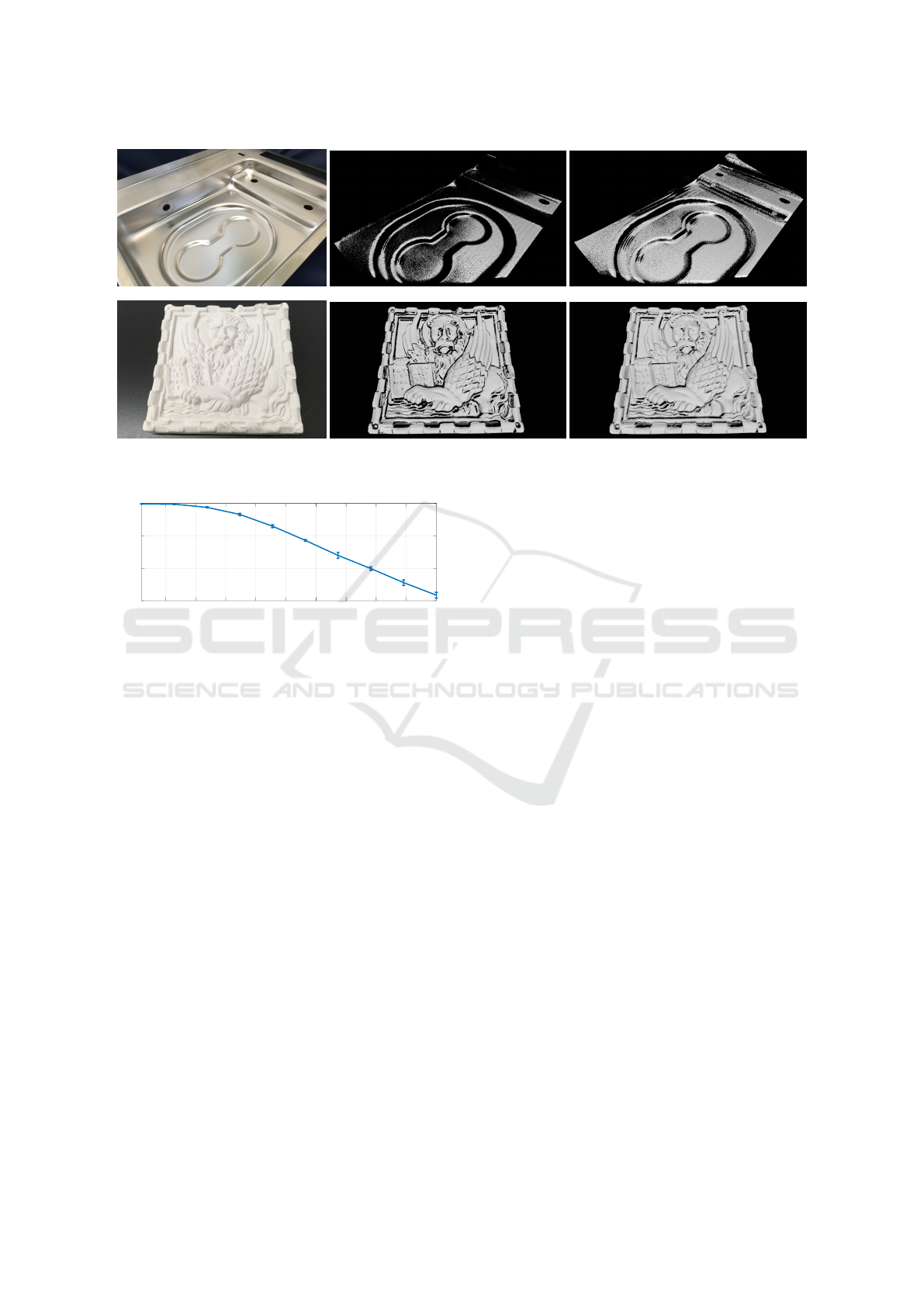
Figure 4: Examples of reconstructions for two different objects. The second column shows the triangulated mesh using
(Lilienblum and Michaelis, 2007); while the third column shows the mesh obtained applying our method.
0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
Signal std
0.4
0.6
0.8
1
% Inliers
Figure 5: Projector delay recovery: percentage of correctly
estimated shifts (inliers) against the acquired noise standard
deviation.
5 CONCLUSIONS
In this paper we proposed a novel phase-shift tech-
nique to simultaneously disambiguate among differ-
ent phase periods and estimate the final projector
code. Our method is based on statistical inference on
the observed phases which we assume being affected
by zero-mean Gaussian white noise. Under this as-
sumption, we derived a Maximum Likelihood estima-
tor for the final projector code taking into account all
the observations in an optimal way.
Additionally, we exploit the Cram
´
er-Rao bound to
derive a lower-bound for the phase estimator variance
according to the variance of acquired signal. This
way, the estimation of the vector ¯σ (the only param-
eter required by our method) can be efficiently com-
puted on-line with the acquisition of the sinusoidal
patterns.
We tested our method both synthetically and with
a real camera-projector structured light setup. From
the the experiments, we observed how the empirically
estimated phase variance is close to the theoretical
lower-bound, suggesting that we can effectively use
that value for the subsequent code recovery. Compar-
isons show how our method can outperform Graycod-
ing and number theoretical multi-phase shift methods
not only in terms of accuracy but also considering the
number of correctly estimated codes. This leads to
coded images that are in general denser, even for chal-
lenging materials.
REFERENCES
Bergamasco, F., Albarelli, A., and Torsello, A. (2011).
Image-space marker detection and recognition using
projective invariants. pages 381–388.
Bergamasco, F., Cosmo, L., Albarelli, A., and Torsello, A.
(2012). A robust multi-camera 3d ellipse fitting for
contactless measurements. pages 168–175.
Cheah, C.-M., Chua, C.-K., Tan, K.-H., and Teo, C.-K.
(2003). Integration of laser surface digitizing with
cad/cam techniques for developing facial prostheses.
part 1: Design and fabrication of prosthesis replicas.
International Journal of prosthodontics, 16(4).
der Jeught, S. V. and Dirckx, J. J. (2016). Real-time struc-
tured light profilometry: a review. Optics and Lasers
in Engineering, 87(Supplement C):18 – 31.
Fanello, S. R., Rhemann, C., Tankovich, V., Kowdle, A.,
Escolano, S. O., Kim, D., and Izadi, S. (2016). Hy-
perdepth: Learning depth from structured light with-
out matching. pages 5441–5450.
Han, J., Shao, L., Xu, D., and Shotton, J. (2013). Enhanced
computer vision with microsoft kinect sensor: A re-
view. IEEE Transactions on Cybernetics, 43(5):1318–
1334.
Kurz, G., Gilitschenski, I., and Hanebeck, U. D. (2014). Ef-
ficient evaluation of the probability density function of
a wrapped normal distribution. In 2014 Sensor Data
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
208

Fusion: Trends, Solutions, Applications (SDF), pages
1–5.
Lange, R. and Seitz, P. (2001). Solid-state time-of-flight
range camera. IEEE Journal of quantum electronics,
37(3):390–397.
Lilienblum, E. and Michaelis, B. (2007). Optical 3d surface
reconstruction by a multi-period phase shift method.
JCP, 2(2):73–83.
Luhmann, T. (2010). Close range photogrammetry for in-
dustrial applications. ISPRS Journal of Photogram-
metry and Remote Sensing, 65(6):558–569.
Macleod, M. D. (1998). Fast nearly ml estimation of the
parameters of real or complex single tones or resolved
multiple tones. IEEE Transactions on Signal Process-
ing, 46(1):141–148.
Pellot, C., Herment, A., Sigelle, M., Horain, P., Ma
ˆ
ıtre, H.,
and Peronneau, P. (1994). A 3d reconstruction of vas-
cular structures from two x-ray angiograms using an
adapted simulated annealing algorithm. IEEE trans-
actions on medical imaging, 13(1):48–60.
Prez, L., Rodrguez, I., Rodrguez, N., Usamentiaga, R., and
Garca, D. (2016). Robot guidance using machine vi-
sion techniques in industrial environments: A compar-
ative review. Sensors (Switzerland), 16(3).
Rife, D. and Boorstyn, R. (1974). Single tone parame-
ter estimation from discrete-time observations. IEEE
Transactions on Information Theory, 20(5):591–598.
Srinivasan, V., Liu, H. C., and Halioua, M. (1984). Au-
tomated phase-measuring profilometry of 3-d diffuse
objects. Appl. Opt., 23(18):3105–3108.
Tikuisis, P., Meunier, P., and Jubenville, C. (2001). Human
body surface area: measurement and prediction using
three dimensional body scans. European journal of
applied physiology, 85(3):264–271.
Vo, M., Narasimhan, S. G., and Sheikh, Y. (2016). Tex-
ture illumination separation for single-shot structured
light reconstruction. IEEE Trans. Pattern Anal. Mach.
Intell., 38(2):390–404.
Winterhalter, W., Fleckenstein, F., Steder, B., Spinello, L.,
and Burgard, W. (2015). Accurate indoor localization
for rgb-d smartphones and tablets given 2d floor plans.
volume 2015-December, pages 3138–3143.
Stochastic Phase Estimation and Unwrapping
209
