
Modeling of Goal-oriented Human Motion Evolution using Hidden
Markov Models
Eman Ahmed
1,2
, Reda A El-Khoribi
1
, Alexandre Muzy
2
, Gilles Bernot
2
and Gamal Darwish
1
1
Faculty of Computers and Information, Cairo University, Giza, Egypt
2
Laboratoire d’ Informatique, Signaux et Systèmes de Sophia-Antipolis (I3S) UNS CNRS, Université Côte d’Azur, France
{eman.ahmed.sayed.ahmed, gilles.bernot}@i3s.unice.fr
Keywords:
Fetus Human, Movement, Goal, Sensory-motor Loop.
Abstract:
Humans have the ability to make many complex movements at the same time with full coordination through
the whole body. This requires control of all body muscles. The body muscles are controlled by the Central
Nervous System (CNS) which consists of the brain and the spinal cord through a group of neurons called the
motor neurons. Each muscle is controlled by lower-level motor neurons called the motor neurons. A motor
neuron controls a group of muscle fibers of the muscle such that when it is activated, this group contracts.
Hence, a muscle movement occurs. Currently, many questions remain unanswered: How this system evolves
to generate the complex movements? How to control the muscles to achieve a certain goal such as reaching
a target position? and how a human becomes able to define goals in the first place? It is believed that the
development of motion begins prenatally with spontaneous fetal movements. In this paper, we are trying to
answer these questions by proposing a theoretical model of human learning of motion starting from being a
fetus. Simulation is provided using computational intelligence and statistical methods.
1 INTRODUCTION
Human motion evolve during different stages starting
from being a fetus till being an infant and then be-
ing an adult (Adolph, 2008). Most of the literature
is focused on modeling the adult sensory-motor sys-
tem such as how the human arm is able to reach a
certain target and grab an object. Modeling of motor
control using forward and inverse models have been
studied extensively in the previous year (D.M.Wolpert
and M.Kawatob, 1998).
However, working on adult models pre-assumes
the adult being able to identify a goal and focus on
how he will be able to achieve it. The question of how
can a human identify a goal in the first place is not
answered yet. To answer this, we believe we should
go back to the fetus stage and model the evolution of
the human motion.
The fetal human possesses an active central ner-
vous system from at least the eighth week of develop-
ment (Flower, 1985). Until then, his nervous system
grows gradually. With his rapidly maturing nervous
system, his nerves are connecting his brain to the rest
of his body traveling from the the brainstem down to
the spine finally extending to his torso and limbs. Us-
ing his developing muscles and reflexes, the fetus is
able to move his limbs. The soft cartilage hardens
into bones starting with arms and legs. The sensory
system develops such that the brain dedicates special
areas for smell, taste, hearing, vision and touch. At
this stage, he may be able to hear mother’s heart beat
and voice, sucking his thumb. He starts feeling move-
ments and his flexing arms and legs are soft and be-
coming stronger. After that, he may make movements
in response to presses on the mother’s belly as ex-
plained in (Viola Marx, 2015). He can feel his own
face and anything within his reach, he will be experi-
menting and refining his sense of touch and grasp by
touching the womb surrounding him and grasping his
cord. Until this stage, eyelids may open as a reflex but
he cannot see yet.
Accordingly, the fetus is able to make all these ac-
tions without his vision, he depends on other senses
only, mainly the senses of touch and hearing.
The question now is how he becomes able to ex-
plore his body and his surrounding? how he is able
to control his hand to touch and grasp? This brings
us back to how a movement occurs through the brain
and the muscular body.
For a movement to occur, this involves a muscle
Ahmed, E., El-Khoribi, R., Muzy, A., Bernot, G. and Darwish, G.
Modeling of Goal-oriented Human Motion Evolution using Hidden Markov Models.
DOI: 10.5220/0007391906050612
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 605-612
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
605

contraction which is achieved by sending a command
signal from the brain to the motor neurons controlling
this muscle fibers to be activated causing contraction
of the muscle. In response, a group of sensory neu-
rons inform the brain with the changes that have oc-
curred. This is done through a sensory-motor loop.
Whether the sensory neurons feedback are sufficient
to learn goals or not is another question that arises.
In this paper, we are trying to answer all the men-
tioned questions: how can a human identify a goal?
how he becomes able to explore his body and his sur-
rounding?. In other words, we are interested in un-
derstanding how a goal-oriented movement is devel-
oped and we believe this starts from the fetus stage by
learning how to define different tasks and control his
muscles to achieve them. With the help of a computa-
tional model, we provide a simulation at a high level
of abstraction of how the movements may evolve dur-
ing the fetus stage. The model is built upon the de-
velopment of one muscle moving upward in a vertical
direction.
In the next section, we provide a simplified bio-
logical explanation of how muscles work for achiev-
ing a movement. Section 3 gives a brief explanation
on Hidden Markov Models. In section 4, a theoretical
framework is demonstrated. The implementation of
the framework is illustrated in section 5 using cluster-
ing and a hidden markov model. Simulation results
are presented in section 6. The paper is concluded in
section 7.
2 THE SENSORY-MOTOR
SYSTEM
Muscles exist in pairs called antagonist muscles. One
muscle performing an action is called the agonist and
the other muscle performs the opposite action and is
referred to as antagonist. Each antagonist muscle has
a set of sensory neurons called proprioceptors that
signal sensory information to the brain. The brain
uses the sensory information to gain his awareness of
the positions of the different limbs among the body
(Heuer and Keele, 1996).
The brain can control any muscle contraction by
activating the corresponding motor neurons. The pair
of antagonist muscles are connected through tendons
attaching them to the bones. One antagonist muscle
contraction causes the extension of the other antago-
nist muscle in the pair.
To make a movement, the contraction of one mus-
cle is required. A command signal is sent to activate
the motor neurons controlling the muscle fibers of this
muscle causing their contraction. Reference (Perru-
choud et al., 2014) provides an abstract architecture
for the sensory-motor loop with biological illustra-
tion.
There exist another class of receptors providing
information about mechanical forces arising from the
body itself, the musculoskeletal system in particular.
These are called proprioceptors, roughly meaning “re-
ceptors for self.” The purpose of proprioceptors is pri-
marily to give detailed and continuous information
about the position of the limbs and other body parts
in space. Among the proprioceptors is the Golgi Ten-
don Organ that signals the tension of the tendon and
muscle spindle which provides the brain with muscle
length information (Purves D and et al., 2001).
Muscle contraction causes an increase in tension
at the tendon and decrease in the muscle length. Con-
sequently, it causes increase in the length of its antag-
onist muscle. The tension at the tendon is signaled
by a proprioceptor referred to as Golgi Tendon Organ
and it is activated as soon as there is tension. Tension
is relaxed due to reflexes unless contraction occurs.
The muscle spindle activates when the muscle
is stretched indicating the rate of change of muscle
length and signals the new length after the stretch is
finished (Byrne and Dafny, 1997). Unfortunately, the
proprioceptions are usually noisy and the brain is usu-
ally unable to perceive the precise proprioceptive val-
ues. However, the brain learns through the imperfect
perceptions (Bays PM, 2007)(Prinz and Bridgeman,
1995).
3 HIDDEN MARKOV MODEL
(HMM)
One of our main hypotheses is that humans learn
from the most frequent actions at all stages. HMM
is suitable for our problem in the sense that our brain
learns through sequences of actions generated over
time. Since the sensory neurons produce feedbacks
to the brain in response to commands, the senses are
observed. On the other hand, the commands are hid-
den as there are no sensory neurons that can describe
the issued commands. Repetition of an action makes
it a habit. Following the same concept, we hypoth-
esize that the brain learns motion generation through
the most frequently used commands.
An HMM model λ = (Q, A, O, B, π), is character-
ized by the following components:
• Q = q
1
, q
2
, ..., q
T
a hidden sequence of T states,
each one is drawn from a set of states Z =
{z
1
, z
2
, ..., z
N
}.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
606

• A =
a
11
a
12
·· · a
1n
.
.
.
.
.
.
.
.
.
.
.
.
a
n1
a
n2
·· · a
nn
a transition proba-
bility matrix A, each a
i j
representing the probabil-
ity of moving from state i to state j, s.t.
∑
n
j=1
a
i j
=
1∀i.
• O = o
1
, o
2
, ..., o
T
a sequence of T observations,
each one is drawn from a set of observations X =
{x
1
, x
2
, ..., x
L
}.
• B = b
i
(o
t
) a sequence of observation likelihoods,
called emission probabilities, each representing
the probability of an observation o
t
being gener-
ated from a state i.
• π is the initial probabilities of all the states.
Generally, HMM is used to solve one of the following
problems:
1. Problem 1 (Likelihood): Given an HMM λ =
(π, A, B) and an observation sequence O, deter-
mine the likelihood P(O|λ).
2. Problem 2 (Decoding): Given an observation se-
quence O and an HMM λ = (π, A, B), discover the
best hidden state sequence Q. We will use the
Viterbi algorithm for solving this problem.
3. Problem 3 (Learning): Given an observation se-
quence O and the set of states in the HMM Q,
learn the HMM parameters A and B. We will
use Baum-Walsh Expectation Maximization algo-
rithm for this problem.
More details about HMM can be found in (L, 1989).
4 THEORETICAL FRAMEWORK
4.1 Abstractions
Two abstractions have been used:
1. The pair of antagonist muscle is abstracted to be
one muscle.
2. When a tension is generated by one muscle, the
muscle spindle of the antagonist will be activated
due to its stretching. In our abstract model, an
increase in tension of one muscle will cause the
increase in length of the antagonist muscle by the
same amount. We will abstract both propriocep-
tors and treat them as being proprioceptors of one
muscle due to the dependency relation between
the length and the tension.
According to the above abstractions, our goal of
reaching a target is reduced to getting a certain muscle
length which is a function of muscle tension. Hence,
our problem becomes a fetus who learns how to reach
different tension levels of one muscle. We are go-
ing to use the term tension and proprioception inter-
changeably in the rest of the paper.
4.2 The Proposed Framework
The framework consists of three main blocks:
1. The Sensory-Motor Map Memory
It is a memory recording all the commands that
are issued and the corresponding sensory feed-
backs referred to as proprioceptors.
2. The Cognitive Map
In literature, the cognitive map is defined as a
person’s spatial memory that store knowledge of
the world and its events and processes (Breed and
Moore, 2012)(Fortin, 2008). We see that moving
from one position to another can be seen as a task
in a broader sense. Hence, we will use it to repre-
sent the cognition ability of the fetus of his body
in the first place. From our point of view, the cog-
nitive map comprises three main units:
(a) Tasks Perception
It is processing the input data from the sensory-
motor map and getting perceptions. Tasks are
then defined out of these perceptions.
(b) Tasks Learning
Each perceived task is to be learned in this unit
using an HMM model. EM algorithm is re-
sponsible for getting the parameters that repre-
sent this task. The task parameters are saved in
the cognitive memory.
(c) Tasks Assessment
After learning a task, the fetus is able to per-
form it whenever he likes. Initially, the task
may not be learned well so the fetus will try
to enhance his ability of doing it. The measure
of performance will be measured in this unit.
3. The Internal Model
When a fetus intends to accomplish a task, he
will need to issue the corresponding command se-
quence. He will exploit the learned task param-
eters and apply HMM decoding problem using
the Viterbi algorithm to estimate the command se-
quence. The internal model is responsible for ap-
plying the decoding (inverse model).
Figure 1 depicts the proposed system framework.
Our hypothesis is that the fetus passes through
three phases to learn:
1. Phase I: Build the training set of commands and
perceptions. We assume that the fetus makes
Modeling of Goal-oriented Human Motion Evolution using Hidden Markov Models
607
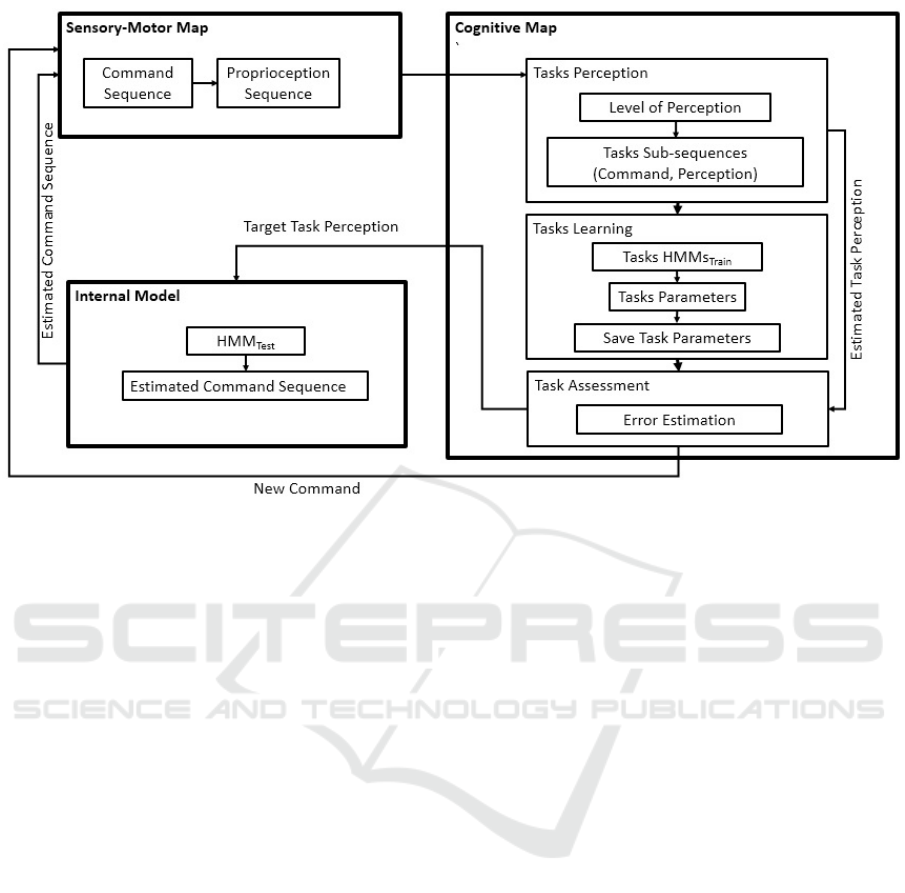
Figure 1: The proposed system framework. The sensory-motor map is responsible for building the training set of commands
and perceptions, the cognitive map trains his cognition abilities using the recorded training set and the internal model helps
the cognitive map to learn how to retrieve the commands to make intended movements.
movements that gets all the possible tensions in
this phase.
• Generate random motor command that results
in muscle contractions.
• Proprioception (tendon tension) is produced.
• Recording in sensory-motor map memory the
association “this command sequence = these
proprioceptions”.
2. Phase II: Train his cognition abilities using the
recorded training set.
• Learn the relationship between the recorded
commands and the recorded proprioceptions
according to the level of perception of the fe-
tus.
• Get parameters that represent this relationship.
• Record the parameters in memory.
3. Phase III: Try retrieving the commands to make
intended movements.
• Given a target perception, guess the estimated
target command according to the parameters
and issue it.
• Get the corresponding estimated perception.
• Compare the target perception to the estimated
perception.
• A new command is issued. It will increase the
training sequence and will result in better esti-
mation and may help in exploring greater pro-
prioception values.
It is important to notice that one perception value
can be achieved by different command sequences.
Our model is based on two hypotheses: the first hy-
pothesis is that the fetus will usually apply the com-
mand sequence that is most probable and the second
hypothesis is that despite the noise, the original rela-
tionship between the commands and the accurate per-
ceptions will be approximated.
We are going to use HMM for modeling the re-
lationship between the command sequence and per-
ceptions for one muscle such that phase II represents
learning the relation between O and Q and get the
mapping parameters as in HMM problem 3. Then,
after the brain develops by learning and obtaining
its mapping parameters, it starts gaining the ability
of decoding (HMM problem 2) by choosing a target
observation sequence and discover which commands
should be issued to obtain it.
The details of implementation is presented in the
next section.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
608

5 IMPLEMENTATION
5.1 The Command Sequence
Motor neurons fire when they receive a command so
that the corresponding muscle fibers contract. Hence,
there will be a spike coming out from the firing neuron
when there is a command. Accordingly, the command
sequence represents the hidden state sequence Q such
that any command q
t
at time t represents whether
there is a spike (1) or not (0). In other words, a com-
mand state sequence is represented by a binary se-
quence such that 1 implies contraction and 0 implies
no contraction.
Initially, the time between consecutive command
signals is large and it decreases gradually as the fetus
gets older as he gains more energy and becomes able
to get stronger contraction.
The command state sequence Q is generated from
a Bernoulli distribution given by:
q
t
= p
t
(1 − p)
1−t
(1)
such that q
t
= 1 refers to issuing a command with
probability p and q
t
= 0 implies the absence of com-
mand with probability (1 − p).
5.2 The Proprioception
It dictates the sensory values are achieved using a
given command sequence. As explained above, the
proprioception represents the tension in our problem.
When a command is given to a muscle, a force is
generated causing increase in its fibers tension. Mus-
cles differ in terms of the number of fibers and size
such that increasing them means the ability to get
more force. Each muscle is represented by a Gaus-
sian function with large variance for large muscles
and small variance for small muscles.
Muscle = exp
−
(x − mean)
2
σ
2
!
(2)
such that x represents the fiber sizes.
The proprioception is given by a convolution func-
tion between the muscle and the command sequence:
tension = MuscleΘQ (3)
such that Θ denotes the convolution operator and
Q is the state sequence.
Figure 2: Proprioception Values for each Sequence.
5.3 The Perceptions
Initially, the fetus is not able to distinguish precise
proprioceptive (tension) values. Accordingly, cluster-
ing of similar proprioception values is performed us-
ing K-Means clustering. The clustering is applied to
the proptioceptive values with small number of levels
at first, then, the number of levels increases gradually
as the fetus gains more abilities for distinguishing dif-
ferent tension levels. The perceptions are the cluster
centers.
The perceptions represent the sequence of obser-
vations O such that o
i
∈ X and X = T where T is a
vector of the clustered tendon tensions.
By recording all this information, the fetus brain
builds his training dataset. After that, it starts to learn
the relation between O and Q and gets the mapping
parameters as in problem 3.
The fetus brain then learns different tasks where
each task represents moving to a new proprioceptive
value from the current proprioceptive value.
5.4 The Task
It is a notion that describes what a muscle can do in
terms of changing its tension from one perceived val-
ues to another. All tasks are defined from the percep-
tions of the training set. The perceptions are divided
into a combination of each two pairs of perceptive val-
ues in increasing order and all subsequences of mov-
ing between these pairs are collected to be the training
set of this task.
A Hidden Markov Model is built for each task and
is trained using these sequences using Baum Walsh
Expectation Maximization algorithm to get the tran-
sition and emission matrices from the collected se-
quences.
After the brain develops by learning the tasks and
obtaining its mapping parameters, its starts gaining
the ability of decoding (problem 2) by choosing a
target observation sequence and discover which com-
mands should be issued to obtain it.
Given a target perception sequence, the most prob-
able command state sequence is obtained using the
Viterbi algorithm.
Modeling of Goal-oriented Human Motion Evolution using Hidden Markov Models
609
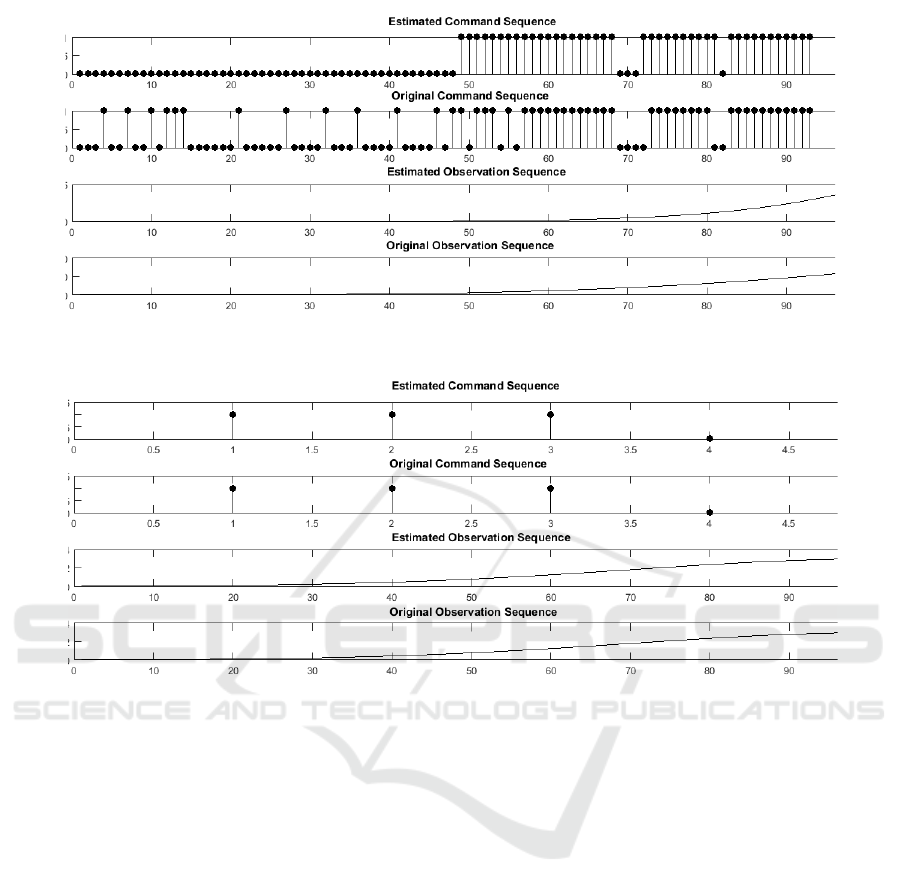
(a) Two Clusters
(b) Four Clusters
Figure 3: The estimated sequences versus the original sequences of a HMM of 100 observation sequence for different number
of clusters.
6 SIMULATION
Results show that the fetus is able to approximate the
correct proprioceptive values over time by retrieving
the required command sequence and by improving his
perceptions to be able to identify more proprioceptive
values.
Our simulation is based upon three stages, each
stage is of duration 50 time units. Within each stage,
we simulate the sequences that can be generated by
the fetus according to his energy and the level of per-
ception that should be increasing with time. We hy-
pothesize that the energy is initially low and increase
with time from the fact that the fetus can not do strong
activities such as kicking in his early stage.
We apply our simulation on one muscle due to the
fact that the abilities of the fetus changes over time,
we built our simulation on a sequence that is grow-
ing with time. First, the simulation has a command
sequence of 50 observations generated by Equation 1
with probability of firing equals 0.2 which is a small
probability that mimic the low energy the fetus has at
his early age. Despite that the resulted proprioceptive
values are very low and the cognition will not be able
to recognize any task to be learned, these are recorded
in memory.
Next, another 50 observations are added with
probability of firing equals to 0.8 where there is an
increase in energy that makes the fetus more capa-
ble of doing stronger actions and hence, issues more
commands. The corresponding proprioceptive values
were calculated as in Equation 3.
Initially, the fetus can either sense a tension or not.
This is simulated by clustering the proprioception into
two large levels of perception as illustrated in Figure
3a. In this case, the fetus recognizes only one task
moving between zero and a perceived tension value.
We are only interested in learning moving from one
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
610
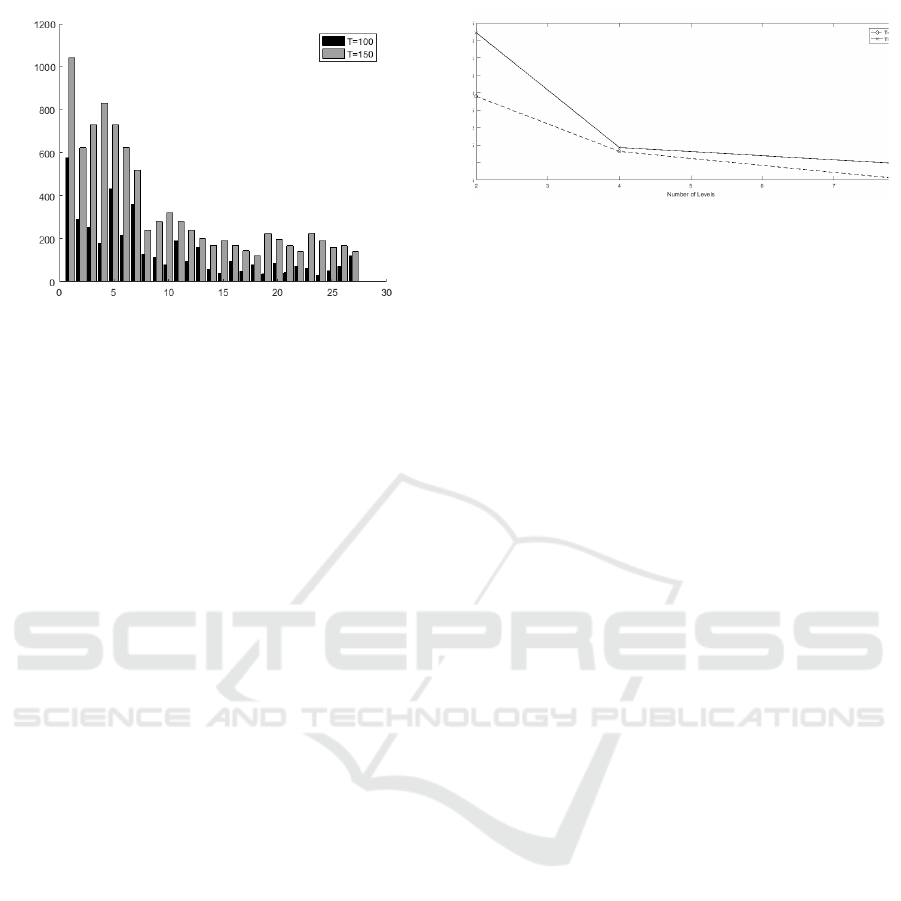
Figure 4: Number of sequences per task for 100 observa-
tions and 150 observations.
tension to another higher tension which involves issu-
ing one or more commands. This is because moving
from one tension to another lower tension is a triv-
ial task as no command will be issued and it can be
learned easily.
Second, fetus capability becomes stronger and he
is able to issue more commands and reach greater ten-
sion values. Figure 2 shows the range of tension val-
ues that exist in sequences of duration 100 and 150,
respectively.
Also, the fetus capabilities evolve by being able
to distinguish different tension values. We simulated
this by repeating the experiment with smaller step to
get 4-clusters as depicted in Figure 3b. Hence, there
are six tasks the fetus should learn.
The experiment is also repeated for 8-clusters.
The fetus will continue to experiment the tasks
and more 50 observations with probability 0.9 are
added which enhances the learning of the previous
tasks.
Increasing the sequence length means increasing
the proprioceptive values that are obtained. Accord-
ingly, the perceptions will approximate more propri-
oceptive values. This make it necessary for the fetus
to increase his level of perception to cover all the new
values.
Figure 4 depicts the number of sequences avail-
able for each task during 100 observations and 150
observations.
Results show that the fetus is able to approximate
the correct proprioceptive values over time by retriev-
ing the required command sequence and by improv-
ing his perceptions to be able to identify more propri-
oceptive values as shown in Figure 5.
Figure 5: Mean Squared Error of all tasks for each quan-
tization level for both sequences of T=100 and T=150 for
unnoisy proprioceptions.
7 CONCLUSION
We have tackled the problem of understanding how
human movements evolve since the age of the fetus.
We proposed the first model that describes how a fe-
tus learns to control one muscle to get an intended
perception by giving it the essential command. The
model passes through random stage where all com-
mands issued are random and demonstrates how this
converges to learning the appropriate relationship be-
tween commands and perceptions. We have proposed
our model of applying k-means clustering to simu-
late perception development over time and we have
shed light on the idea of how the human builds his
own abilities of identifying goals which represented
here reaching one perceived tension value from an-
other. The simulation was done using Hidden Markov
Model since its basics matches with our hypothesis
that we learn from the most frequent actions which
are represented as sequences. The model presented
in this paper is a simple abstract model to illustrate
the whole process. Further improvements are being
done on this model to include more details. This work
would benefit biologists to gain better understanding
of the fetus stage and how the human movements de-
velop, further, it may help them discover some early
impairments in case of monitoring the fetus actions
and responses over time. Moreover, it can be used
in the robotics and humanoids field to explore more
varieties.
ACKNOWLEDGEMENTS
The authors thank the NeuroMod insti-
tute (http://univ-cotedazur.fr/en/idex/projet-
structurant/cauca) in Nice-Sophia Antipolis that
funded this research.
Modeling of Goal-oriented Human Motion Evolution using Hidden Markov Models
611

REFERENCES
Adolph, K. (2008). Motor and Physical Development: Lo-
comotion. Encyclopedia of Infant and Early Child-
hood Development.
Bays PM, W. D. (2007). Computational principles of sen-
sorimotor control that minimize uncertainty and vari-
ability. The Journal of Physiology., 578(Pt 2):387–
396.
Breed, M. D. and Moore, J. (2012). Chapter 8 - move-
ment: Search, navigation, migration, and dispersal. In
Breed, M. D. and Moore, J., editors, Animal Behavior,
pages 219 – 252. Academic Press, San Diego.
Byrne, J. H. and Dafny, N. e. (1997). Neuroscience On-
line: An Electronic Textbook for the Neurosciences
http://nba.uth.tmc.edu/neuroscience/, chapter Chapter
1: Motor Units and Muscle Receptors, page Sec-
tion 3. Department of Neurobiology and Anatomy,
The University of Texas Medical School at Houston
(UTHealth).
D.M.Wolpert and M.Kawatob (1998). Multiple paired for-
ward and inverse models for motor control. El Sevier,
Neural Networks, 11:1317–1329.
Flower, M. J. (1985). Neuromaturation of the human fetus.
The Journal of Medicine and Philosophy, 10(3):237–
251.
Fortin, N. (2008). Navigation and episodic-like memory
in mammals. In Byrne, J. H., editor, Learning and
Memory: A Comprehensive Reference, pages 385 –
417. Academic Press, Oxford.
Heuer, H. and Keele, S. W. (1996). Handbook of Perception
and Action Volume 2: Motor skills, volume 2. ACA-
DEMIC PRESS.
L, R., editor (1989). A Tutorial on Hidden Markov Mod-
els and Selected Applications in Speech Recognition
Proceedings of the IEEE, volume 77 of 2.
Perruchoud, D., Murray, M. M., Lefebvre, J., and Ionta, S.
(2014). Focal dystonia and the sensory-motor inte-
grative loop for enacting (smile). Frontiers in Human
Neuroscience, 8:458.
Prinz, W. and Bridgeman, B. (1995). Handbook of Per-
ception and Action Volume 1: Perception, volume 1.
ACADEMIC PRESS.
Purves D, Augustine GJ, F. D. and et al., e., editors
(2001). Mechanoreceptors Specialized for Proprio-
ception. Neuroscience, Sunderland (MA): Sinauer
Associates, 2 edition.
Viola Marx, E. N. (2015). Fetal behavioural responses to
maternal voice and touch.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
612
