
SIMSEA: A Multiagent Architecture for Fishing Activity in a Simulated
Environment
Jos´e Cascalho
1,2,3
, Paulo Trigo
1,4
, Maria Jo˜ao Cruz
3
, Armando Mendes
2,3,5
, Eva Giacomello
6,7
,
Adriana Ressurreic¸˜ao
6,7,9
, Tom´as Dentinho
8
and Telmo Morato
6,7
1
BioISI - Biosystems and Integrative Sciences Institute, FCUL -Universidade de Lisboa, Lisboa, Portugal
2
NIDeS - N´ucleo de Desenvolvimento em e-Sa´ude, Universidade dos Ac¸ores, Ponta Delgada, Portugal
3
FCT - Universidade dos Ac¸ores, Ponta Delgada, Portugal
4
ISEL - Instituto Superior de Engenharia de Lisboa, Lisboa, Portugal
5
Algoritmi, Universidade do Minho, Portugal
6
MARE – Marine and Environmental Sciences Centre, Horta, Portugal
7
OKEANOS Centre, Universidade dos Ac¸ores, Horta, Portugal
8
FCAA - Universidade dos Ac¸ores, Angra do Hero´ısmo, Portugal
9
CCMAR Centre of Marine Sciences, Faro, Portugal
Keywords:
Multiagents, Finite-state Machines, Muti-criteria Decision-making.
Abstract:
Understanding fishermen decision-making proccess, plays a key role i n predicting the impacts of the fishing
activity in the marine ecosystems. Simulating fishing activity using multiagent based approaches provides
tools that assist decision-makers in order to pursuit sustainable fishing activity. In this paper we present a
multiagent architecture for the fishing activity where geo-referenced resources and fishing agents with different
profiles are used to model and simulate the complexity of human fishing activity. A first implementation of
the model (via NetLogo), along with gathered results, provides insights into t he capability to build a research
tool for fisheries management.
1 INTRODUCTION
Fishing activity has been under scrutiny mainly be-
cause of the over-fishing and its impact in marine
ecosystems as well as in the economy of fishing com-
munities. Different research tools have been used to
understand the exploitation of the marine ecosystems,
including trophic web and biogeochemical simulation
models, despite the consid erable problems in tuning
and validating complex numerical models with field
data (Pitcher et al., 2007; Morato et al., 2016). M ulti-
agent systems have been increasingly used in the con-
text of what is being defined as a coupled human and
natural systems o r CHANS systems (An, 2012). In
these systems it is usually aggregated a GI S r epresen-
tation, making interaction m ore representative of the
real world and socio -econom ic mo dels, re- focusing
attention in e cosystem analysis from the ecology of
’nature’ to the important influence of people (An,
2012). With regard to the scenario being studied, dif-
ferent levels of complexity mu st be considered and all
of them must be somehow inco rporated in the model
(Pitcher et al., 2010).
In this paper we presen t the SIM SE A , a multi-
agent architecture for simulating fishing activity in
a geo-referenced scenario where simulated human
decision-making agents with different profiles are
used to explore the complexity of human decision-
making. Profiles contribute to increase the diversity of
behaviours of these agents, tuning their decision s by
using a multi-criteria decision-mak ing process. In this
paper we resport on the first implementation of a m o-
del in NetLogo (Tisue and Wilensky, 2004) applied to
the scenario of dem ersal fishing activity in Azores ar-
chipelago (NE Atlantic). Agents have different roles
in the mo del, they are either static or dynamic, re-
presenting different entities such as vessels, ports and
fishing grounds (are a s where fishing activity occurs).
The model uses a multi-criteria decision-making me-
chanism applied on the top of a finite-state mach ine
to model agents’ behaviour which simulate human
decision-making. Moreover, the concept of risk aver-
202
Cascalho, J., Trigo, P., Cruz, M., Mendes, A., Giacomello, E., Ressurreição, A., Dentinho, T. and Morato, T.
SIMSEA: A Multiagent Architecture for Fishing Activity in a Simulated Environment.
DOI: 10.5220/0007393502020209
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 202-209
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

sion is used to create behaviour diversity among these
agents. A set of agents with different profiles descri-
bed as optimistic, pessimistic or middle are used to
tune the behaviour of these agents. To the best of our
knowledge, this is the first study focused on the simu-
lation of fishing activities in the Azores using Agent-
Based Systems.
The paper is organized as follows: In section 2
a background and related work is presented. Then,
in section 3, a description is mad e of the a rchitecture
proposed. In sections 4 and 5, the imp lementation and
the running experiment using NetLogo are d iscussed.
Finally, in section 6, the conclusions are presented.
2 BACKGROUND AND RELATED
WORK
Previous work on multiagent based simulation de-
monstrated the utility of these tools applied to dif-
ferent areas (Abar et al., 2017) . DISPLACE (Bas-
tardie et al., 201 5; Bastardie et al., 2013) is a n agent
based simulation tool applied to the fishin g activity,
calculating the income and evaluating the best ves-
sels’ trajectory under spatial co nstraints. It includes
a geo-referenced dyna mic m odel of the resources (i.e.
fishing stocks) and the vessels have a simple decision-
making process based on a finite-state machine ar-
chitecture. This model is used essentially to evalu-
ate the costs/benefits of agents’ decisions predicting
also what are fishing captures in different scenarios.
Souli´e an d Th´ebaud (2006), also developed a multi-
agent bio-e conomic mode l to analyze the consequen-
ces of regu la tory measures, such as temporary fishing
bans on the allocation of fishing effort between target
species and areas, and the potential e conomic impacts
of th ese measures.
The models produced in the con text of the
CHANS systems are often based on pro duction rule
systems i.e. systems that use rules if-then-else, and
some deliberative capabilities to fulfil goals however
without explicit de liberation or cognitive processes.
One of the reasons pointed out by som e authors is th e
fact that simpler models are better suited if the ob-
jective is to predict the behaviour of an organization
as a whole instead of predicting with accuracy a be-
haviour at the individual or small group level ( Balke
and Gilbert, 2014). Alth ough SIMSEA is intended to
analyse the global behaviour of a set of entities, it also
has the goal to address a small group of agents follo-
wing specific constraints related to th e location and
availability of resources. So, it is expe cted to provide
decision-making methods that increase the capability
of the simulation to address the diversity of behavi-
ours related to the fishing activity.
Usually when human decision-making is part of
the simulated model of an agent, the concept of
being rational (Kennedy, 2012) is addressed. A ra-
tional agent has consistent an d well-defined preferen-
ces across all available decisions options and cho oses
the option that meets its preferences best, taking into
account all relevant information. U sually, th e boun-
ded rationality, a concept of rationality more close
to human decision-making, is adopted. If an agent
has a bounded rationality, h e takes a decision ba-
sed on his limited information and cognitive capabili-
ties in his limited processing time (Groeneveld et al.,
2017). A rational decision-making is often associa-
ted to maximizing expected utility. So, bounded rati-
onal agents are the ones that provide answers to pro-
blems maximizing the utility measured in that spe c ific
contexts and within their own limitations. Maximi-
zation utility is usually addressed as a multi- criteria
decision problem, where enric hed methodologies are
used, implying the selec tion of the best compromise
solution that usually depends on the preferenc e s of
the decision-maker (Tomic et a l., 2011) . In SIM-
SEA, agents modelling human behaviour use a multi-
criteria decision-making mechan ism. Moreover, to
increase the diversity of behaviours, it was decided
to adopt the concept of risk aversion/ risk seeking
as a way to express agents with different behaviours
and characterize their profiles as optimistic v s. pes-
simistic. Several authors have been considering these
same concepts as a way to d escribe how agents’ be-
liefs have consequences in their behaviour. In particu-
lar, in a financial crisis scenario, an optimistic behavi-
our corresponds to an agent that overestimates their
informa tion and capacities (Said et al., 2018). Ot-
her authors use the risk aversion perspective to create
agents with different behaviours (Magessi and Antu-
nes, 2013). In this case, they may have a high pre-
disposition for risk, called a r isk-demander, or a low
predisposition for risk, a risk-fearful.
3 MODELS ARCHITECTURE
SIMSEA is intended to simulate fishing activity. The
architecture is organized in thre e layers where each
one is associated to different entities with specific pur-
poses. The rationale behind the cre ation of the three
layers is the following:
• The bottom layer ref ers to the geo-physical en-
vironm ent with information gather e d from geo-
graphic information systems (GIS). This data is
fixed along the simulation.
SIMSEA: A Multiagent Architecture for Fishing Activity in a Simulated Environment
203
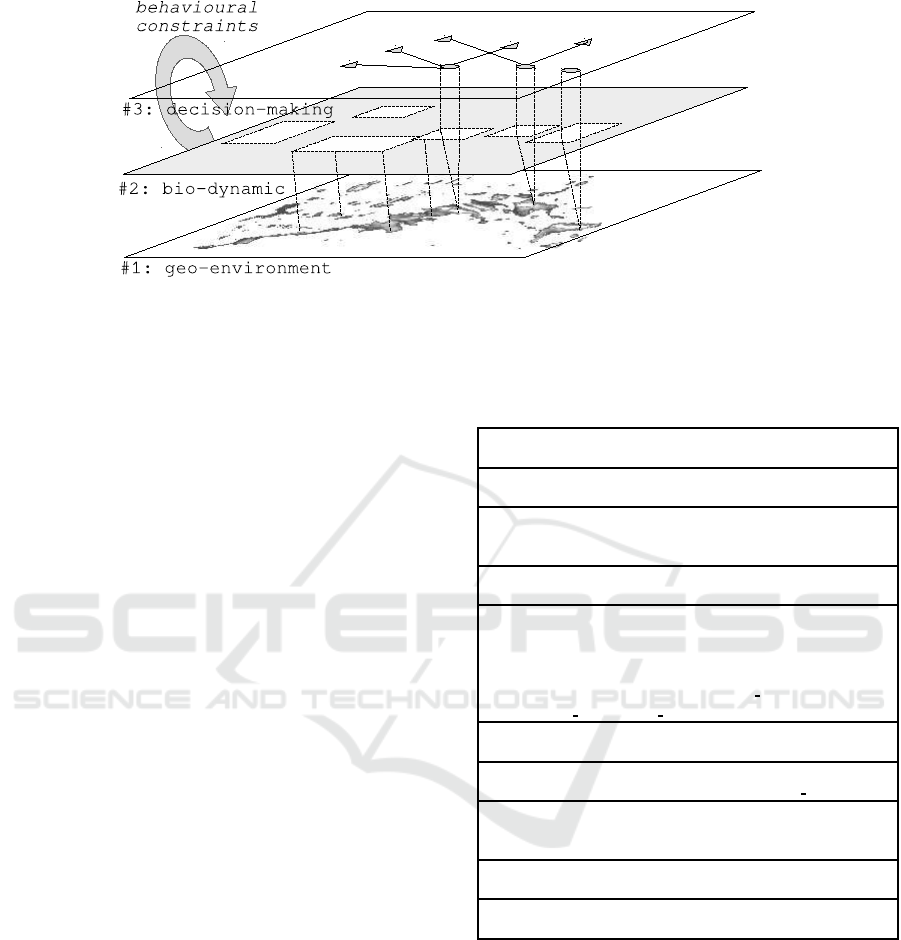
Figure 1: Different layers in SIMSEA architecture: The bottom layer corresponds to physical features (e.g. bathymetry, water
temperature, etc); the mid layer includes the bio-dynamic features (eg. fish biomass index) and identifies fishing areas; the
top layer includes fixed (i.e. fishing grounds and ports) and moving agents (e.g. vessels).
• The mid layer corresponds to fishery resources,
attributing a value of available fish biomass for
each fishing ground. This data can be obtained
from the biology and behaviour of the species
considered in the model or from other type of ex-
perts’ data related to the amount of resources in
the different fishing areas of the scenario.
• The top layer includes the static and moving
agents (e.g. fishing grounds, ports and vessels)
and their (economic and social) interactio n.
Agents in the model have different levels of com -
plexity. For example, vessels movements are the re-
sult of fishermen decision-making and, so, it must
be added decision-making c apabilities to these agen ts
whereas fishing gr ounds are just reac tive agents to-
ward constraints imposed to the model i.e. closin g
a fishing ground to the fishing activity. As depicted
in figur e 1, c onstraints to the agents’ behaviours with
respect to the bio-dynamics (e.g. stock more or less
abundant) and the interaction between agents (e. g. a
port closes w ith adverse weather conditions) are also
part of the model.
3.1 Simulated Environment
The simula te d environment corresponds to the bottom
and mid layers in the model. At the bottom layer it is
defined the geo-referenced physical area for the sce-
nario where data on bathymetry, mean temperature,
etc, may be allocated. The mid layer adds biological
informa tion related to the fisher y resources, e.g. fis-
hing stock for different species and the variation of
recruitment f or the species captured (Bastardie et al.,
2013).
Table 1: High l evel description of agents using Backus-
Naur Form.
Agent ::=
< agentType,agentFeatureSpace,agentDecisionSpace >
agentType ::=
V ESSEL|F ISHGROUND|PORT
agentFeatureSpace ::=
V ESSEL
FeatureSpace
|FISH GROU ND
FeatureSpace
|
PORT
FeatureSpace
agentDecisionSpace ::=
V ESSEL
DecisionSpace
|FISHGROU ND
DecisionSpace
PORT
DecisionSpace
V ESSEL
FeatureSpace
::=
< geoRe f Local , velocity,workingPeriodMax,workingPeriodMin,
restingPeriod,catchRate, f ishingDistanceMax, f ishingDistanceMin
f ishingPr iceMax, f ishingPriceM in, f ishingCostMax, f ishingCostMin,
size,registeredPort, portOrigin, portDestination
vector,
f ishingGround
vector, pro f ile vector >
V ESSEL
DecisionSpace
::=
< DECISION
portDestination
,DECISION
f ishingGround
>
PORT
FeatureSpace
::=
< geoRe f Local , state,constraintDestination, destination
vector >
PORT
DecisionSpace
::=
< DECISION
portState
,DECISION
constraintDestination
,
DECISION
constraintQuota
,DECISION
constraintFishing
>
FISHINGGROU ND
FeatureSpace
::=
< geoRe f Local , state,biomassIndex >
FISHGROU ND
DecisionSpace
::=
< DECISION
FishGroundState
>
3.2 Agency Model
Agents main properties are summarized as follow (ta-
ble 1):
• Agents make decisions supported by a set of fea-
tures, some related to their own properties, others
as a resu lt of environment perception.
• Each agent ca n be of the type VESSEL,
FISHGROUND or PORT:
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
204
(a) VESS EL and PORT types model human beha-
viours.
(b) FISH G ROUND type is used to model the d yn-
amics associated to fishing on a spec ific fishing
ground.
• Feature space contains the set of featur e s for each
agent type in the model.
• Decision space has a set of higher level functions
defined in the decision-making context as multi-
criteria decision-making mec hanism or as con-
straint decisions based on rules applied to some
scenario.
Table 2 describes the details of the features as-
sociated to each agent. Agents are implemented
through finite-state machines (Adam et al., 2017) and
the decision-making functions are called in specific
agents’ states. In the exam ple discussed in section 4,
only the decision-making func tion related to getting
to the fishing ground is implemented. The oth er ty-
pes are the ones that r e sult from rules imposed to the
scenario. These rules model decisions concerning the
management of r e sources by local government autho-
rities
1
.
FISHGROUND and PORT types can be on a o pen
or closed state. The de cision to open or close a port
can be autonomou s (e.g. weather conditio ns) while
the decision to close or o pen a fishin g area may occur
from co nstraints defined in the scenario to be studied.
Destination constraints are imposed by rules (e.g. De-
mersal fishing ac tivity restricted 3 nm from shore).
FISHGROUND type uses an index of relative abun-
dance of fish (biomass index) which determines the
catch f or each vessel in that specific area.
Table 2: Lower level description of agents using Backus-
Naur Form.
velocity ::= nm/h
workingPeriod ::= #hours-at-fishing
restingPeriod ::= #hours-at-port
f ishingMaxDistance ::= max-distance
f ishingMinDistance ::= min-distance
size ::= size A|size B
portDestination vector ::= [] |[portDestination
1
, portDestination
2
,...]
f ishingGround vector ::= [] |[ f ishingGround
1
, f ishingGround
2
,...]
catchRate ::= kg/h
DECISION
portDestination
::=
multi
criteria decision f unction(portDestination vector)
DECISION
f ishingGround
::=
multi
criteria decision f unction()
DECISION
portState
::= multi criteria decision
f
unction()
DECISION
constraintDestination
::=
constraint
decision f unction( f ishingGround vector)
1
In future models, these rules can be modelled as part of
governance agents.
3.3 Decision-making
Two main concerns guided the implementation of
decision-making. First w e needed to use a decision
mechanism with enough complexity to tackle a simu-
lation where agents model human decision-making.
Secondly, we were looking for a way to identify dif-
ferent profiles among agents that took decisions, ex-
pecting that these agents’ behaviours could be biased
to a m ore o r less aversion to risk behaviour. Based
on these two concerns, we decided to follow a multi-
criteria approach with the following components:
• A set o a
1
...a
k
alternatives (options) for ea c h
agent’s decision.
• A set of criteria, c
i
,... c
n
, defined for each alter-
native;
• A set of weights w
i
...w
n
which represents the re-
lative importance each criterion has for the agents;
• A set of f
1
,... f
n
evaluation criteria.
Naturally, each criterion has a possible different
domain from the other criteria and c are should be ta-
ken in eliminating the scaling-effects of the used cri-
teria.
More formally, we define a multi-criteria problem
as:
decision = argmax
a
i
∈A
{ f
1
(c
1
,a
x
),... f
n
(c
n
,a
x
)|a
x
∈ A}
(1)
where A is a finite set of alternative actions, c
i
, i =
1,..., n are n criteria, w
i
, i = 1.... ,n are the associa-
ted weights denoting the relative importance of eac h
criterion and f
1
,. . . , f
n
are the evaluation criteria for
each a
x
. This means that as an output of the decision,
the option based on the evaluation of multiple criteria
applied to each alternative in A must be the best op-
tion th at maximizes the result.
Each f
i
(c
i
,a
x
) is calculated as follows:
• V
c
i
(a
x
) is calculated for each criterion c
i
, i ∈
{1,...,n }
• f
i
(c
i
,a
x
) = sgn (c
i
) ∗V
c
i
(a
x
), sg n(c
i
) ∈ {−1,1}
To make the final decision, an utility function is
calculated for each a
x
, x ∈ {1,...,k} as depicted in
equation 2.
U(a
x
) =< w
1
,w
2
,...,w
n
> ∗
< f (c
1
,a
x
), f (c
2
,a
x
),..., f (c
n
,a
x
) >
T
(2)
The option a
x
with highest utility is, then, selected.
Note that sgn(c
i
) expresses the signal of the criteria,
maximizing or minimizing the contribution of c
i
to
the utility.
As mentioned before, the output of the function
V
c
i
must be a universal compa rable value. One p ossi-
bility is to consider the value of a cost/gain for each
SIMSEA: A Multiagent Architecture for Fishing Activity in a Simulated Environment
205

V
c
i
e.g. the cost in euros/km of a vessel’s tr ip. This
was the solution tha t was tested in the simulation (see
section 4). However th ere are other options like the
ones that use preference functions that sum up the
contribution of the option a
x
that represents the inten-
sity of a prefe rence when co mpared to the o ther opti-
ons (Tom ic et al., 2011 ). In this case the c ontribution
to utility is the result of compariso n with other options
instead of having an universal comparable value. This
option is expected to be tested in future experiments.
Finally, selecting from a set of options a
x
can also
be constrained by rules specifying which set of opti-
ons can be considered . So, for each decision, a co n-
straint shou ld be taken into account following the ru-
les which are applied to the original set of option s a
x
,
returnin g a sub-set of options (equation 3).
New
A = constraints(A), New A ⊂ A (3)
4 IMPLEMENTATION OF
SIMSEA IN NetLogo
NetLogo (Tisue and Wilensky, 2004) is a free soft-
ware platform founded in multiagent programming
languag e and modelling environment for simulating
complex natural and social phenomena. With Net-
Logo the modeller can give instructions to hund-
reds or thousands of independent agents specifying
how they should b ehave and inter act with one anot-
her. NetLogo is being used to build an endless vari-
ety of simulations, allowing to explore the behaviour
of individuals under various conditions and the pat-
terns th at emerge from their interactions. The mo-
ving agents are called turtles and move over a two-
dimensional grid of patches which may also execute
instructions and interact w ith turtles and other pat-
ches. The execution cycle of instructions in NetLogo
is made b y calling all the age nts in the model by a su-
pervisor agent called the observer. NetLogo includes
a tool for running the simulation experiments, dubbed
Behaviour Space, that a llows parameter sweeping i.e.
systematically testing the behaviour of a model across
a range of parameter settings.
Netlogo have been considered as one of the tools
that supports simulation at a medium-scale of scalabi-
lity (Abar et al., 2017). T he fact that the development
effort is easy and that the high level language used
to model the agents facilitates the interaction betwe en
researchers with different b a ckgrou nds, led us to im-
plement a first prototype in NetLogo. T he following
features were used in the model tested:
• The scenario o f the exp e riment is the archipelago
of Azores, NE Atlantic;
• A multi-criteria decision-making mechanism is
used to select a fishing ground for vessels of a spe -
cific size, located at ports in one of the archipelago
islands;
• Two criteria for selecting a fishing ground are ap-
plied: the distance from the port of orig in and the
fish biomass index;
• A profile is defined by weighting the two criteria
differently.
A description of the e nvironment and how the
vessels make decisions is explained in the following
sections.
4.1 Environment
The environment is defined by th e combination of a
geo-referenced physical area, the bathymetry and a
biomass index. Depth was obtained as bathymetric
data composite using multiple sources: GEBCO
08,
grid (MOMARGIS v2, DOPUAz), multi-beam su r-
veys (GMRT grids), point and contour data digitized
from na utical charts in the vicinity of the island s.
In the SIMSEA model geo-r eferenced physical
area of the scenario represents the archipelago of the
Azores and respective fishing areas within the Exclu-
sive Economic Zone (EEZ) . A value of bathymetry
is added to each cell of the grid (corresponding to an
area 0 .14km
2
) used in the scenario.
The biomass index is a measure of relative bio-
mass of fish , a nd the model use it to represent the
biomass of fish in the different fishing areas. I n the
present model it is assumed that the value is static for
each simulation. A range of values from 1 to 9 was
arbitrarily attributed to the index, and randomly asso-
ciated to each fishing area.
Vessels moving in th e environment know both the
bathymetry of each patch and the location of the dif-
ferent fishing grounds. In the simulation, it was consi-
dered the fishing of the mo st valuable com mercial fish
species in the Azores, the blackspot seabream Pagel-
lus bogaraveo (Menezes et al., 2013).
4.2 Agent’s Decisions
The decision-making mechanisms were modelled
only for agents of the VESS EL type when they select
a specific fishing ground.
U(a
f g
) = w
d
∗ f (c
d
,a
f g
) + w
b
∗ f (c
b
,a
f g
)
(4)
Two criteria c
d
and c
b
, are used to calculate the
utility for each fishing ground option (see equation 4).
The first corresponds to th e distance from port origin
to the fishing ground , mea sured as a mean distance
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
206

between the closest patch and the most distant patch
of a specific fishing ground area from the port. It has
a negative contribution to the final result as depicted
in equatio n 5. The second criterion is the index of
biomass of the fishing ground area and has a positive
contribution as de picted in equation 6. The maximum
value corresponds to the patches where it is expected
to capture more fish.
f (c
d
,a
f g
) =
−V
c
d
(a
f g
) = − f uel price ∗ distance(a
f g
)
(5)
f (c
b
,a
f g
) =
+V
c
b
(a
f g
) = + f ish
price/kg ∗ biomass index(a
f g
)
(6)
With the help of the equation 4, three different
profiles are identified, based on the risk aversion con-
cept (Mandrik and Bao, 2005). The first one, optimis-
tic, assumes tha t it will always be rewarding to select
the spot with the hig hest biomass index discarding the
distance from the po rt. In this case, the weight w
b
=
1, meaning that it takes into account only the index
of biomass criterion. The second one, pe ssimistic, se-
lects the closest spot, because it assumes that it will
be never captured e nough fish to compensate the trip
cost. In this case, the weight w
d
= 1. Finally, the
middle p rofile corresponds to the fisherman that weig-
hts equ ally the two criteria evaluating the cost of long
distances versus the gains of fish catches.
5 RUNNING THE EXPERIMENT
To test SIMSEA model, two experiments were run
with different fishing price i.e. the Exp. 1 with lower
price and the Exp. 2 with a higher price. An expe-
riment comprised four simulations, each one with a
random distribution of bioma ss index and with a set
of profiles covering all the possible types of fishermen
behaviour. Moreover, each simulation was run for dif-
ferent sets of optimistic vessels, pessimistic vessels,
middle vessels and for a set of half of vessels optimis-
tic and a half pessimistic (mixed).
The experiment intended to test the capabilities of
the model. The values used for the different parame-
ters are no t yet validated and some of them are only
referenc e values.
5.1 Input Variables
Table 3 describes the input variables tested in the sim-
ulation. Each experiment had four simulations, each
one setting a random distribution of biomass index.
A simulation run for a time limit of 240 ho urs, cor-
respond ing to 10 days and was repeated 25 times for
each profile. The moving agents representing vessels
were divided in two c ategories according to vessel
length, namely size A to simulate vessels with 0-9 m
in length and size B to simulate vessels with size su-
perior to 9 m. The variables fuel price and working
and resting pe riod, had d ifferent values according to
the vessel type.
The two categories of boats were proscribed to
fish within 3 nau tical miles from shore and size A bo-
ats were also prohibited to travel beyond 30 nautical
miles.
The vessels move along a grid of patches and cap-
ture quantities of fish propo rtional to the fish biomass
present in a given area.
Table 3: Input variables tested in the SIMSEA.
Experiment
Exp. 1 Exp. 2
N.
o
simulations
4 4
N. runs
by profile
Optimistic 25 25
Pessimistic 25 25
Mixed 25 25
Middle 25 25
Working P eriod (h)
A (6-12)
B (12-120)
A (6-12)
B (12-120)
Resting Period (h)
A (10)
B (8)
A (10)
B (8)
Fuel price (euros/nm)
A (4)
B (7)
A (4)
B (7)
Fish price (euros/kg)
8 15
Biomass index
Random Random
The profile is related to the choices made by fis-
hermen to select a specific fishing area. The profi-
les optimistic, pessimistic and middle were present in
both experiences. The choice of fishing grounds was
dependent on the eva luation ma de within each profile.
The simulation run for the cases where all vessels
A and B w e re optimistic (w
b
=1), pessimistic (w
d
=1),
middle (w
b
=0.5 an d w
d
=0.5) or mixed (half of the
vessels pessimistic, the other half optimistic). Suc h
behavioural diversity was expected to represent the
different behaviours of fishermen.
Fuel price per n autical mile (nm) was determined
for each vessel type according to the vessels charac-
teristics. Fuel price was calculated by multiplying the
vessel spee d by the vessel consu mption per mile and
this value b y the current f uel price for fisheries in the
region (0.58 Euros). The price of the fish was esta-
blished according to the annual average value in the
auction for blackspot seabream.
SIMSEA: A Multiagent Architecture for Fishing Activity in a Simulated Environment
207
5.2 Experimental Results
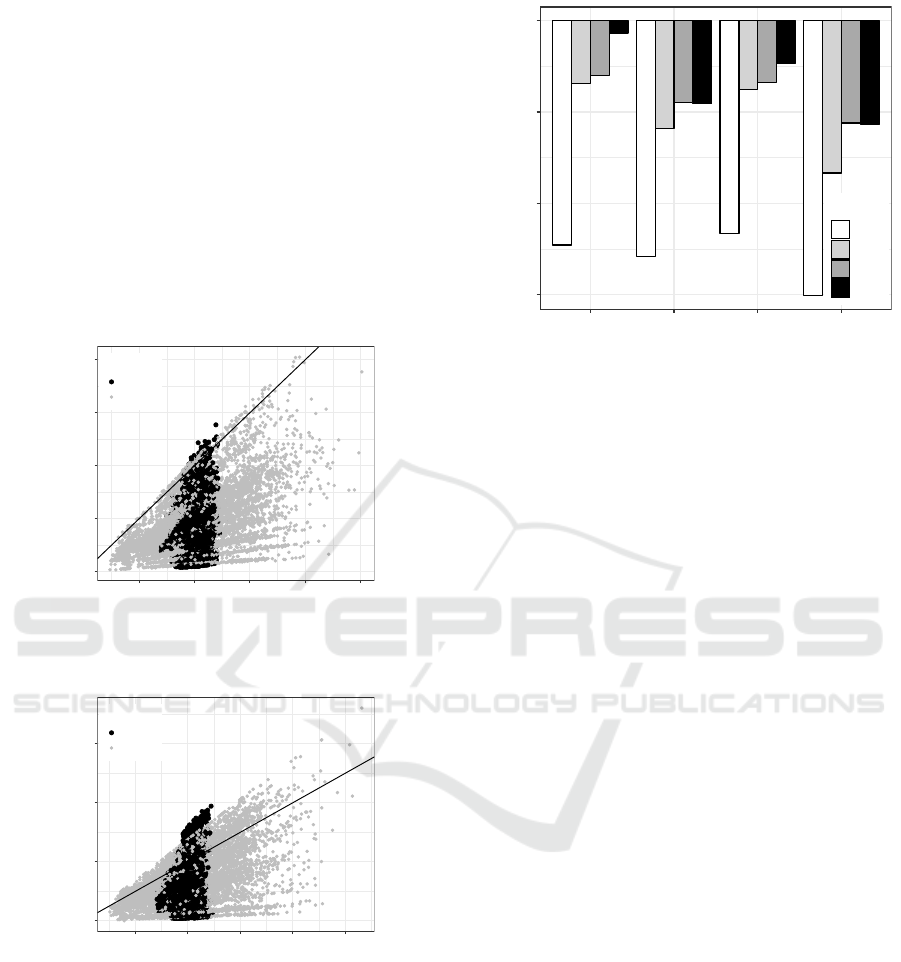
Figure 2 and 3 shows cost vs. gain of fishing resulting
from the simulation, for both Vessel A a nd B types.
In both figures it is possible to observe that Vessel A
has the points restricted to a specific range cost. This
result may be related to the fact that A are prohibi-
ted to travel beyond 30 nautical miles. Nevertheless,
vessels of both types re a ch the break even in the two
experiments, showing that restrictions do not rule out
the possibility of vessels having profit. It is also worth
of notice the higher gain variability from experiment
2, with higher fish p rices when c ompared with expe-
riment 1, as expected.
0
10000
20000
30000
40000
10000 20000 30000 40000 50000
Cost
Gain
vessel_size
A
B
Figure 2: Cost vs gain for Vessel A (black dot) and Vessel
B (grey dots) types. Gains are calculated from the sale of
the captured fish using t he lowest fish sale price.
0
20000
40000
60000
10000 20000 30000 40000 50000
Cost
Gain
vessel_size
A
B
Figure 3: Cost vs gain for Vessel A (black dot) and Vessel
B (grey dots) types. Gains are calculated from the sale of
the captured fish using t he highest fish sale price.
The estimation of mean profit for th e types of
agent profile and fish biomass distribution index led to
major differences in values, as demonstrated in figur e
4. This figure shows the importance of distribution
of biomass for the final results of the experiments. It
also shows tha t the different profiles have significant
differences in revenue outcomes, providing an insight
of the sensitivity of the model towards these two pa-
rameters
−15000
−10000
−5000
0
middle mixed optimistic pessimistic
Profile
Profit mean (value)
biomass
bio1
bio2
bio3
bio4
Figure 4: Mean profit per agents profile on experiment 2.
The four colors distinguish the biomass scenarios.
These experiments confirm the complexity of the
simulation model and the high influence of results for
the contr olled factors as agent’s profile, vessel type
and fish biomass distribution.
6 CONCLUSION
In this paper we pr esent SIMSEA, a multiagent simu-
lation system to support decision management related
to fishing activity. A three layer architecture aggre-
gates the data from GIS and the data from fishing re-
sources to feed the agents, representing the entities in
the simulate d con text.
The NetLogo implementation provid e d insights
on how the mo del reacts to the diversity of data. The
experiment used profiles and a randomized set of ini-
tial parameters to study the output patterns. These
features and data w e re responsible for a diversity of
outputs for each category of vessel’s size and for the
different profiles. As a first approach testing the mo-
del, it is possible to identify that fishing pro fit m ay be
influenced by agent profile and the variability associ-
ated to the distribution of biomass index. As expected
the profiles that target fishing areas with higher bi-
omass index are those that obtain a higher revenue,
even when they ignore the cost associated to the dis-
tance.
Further work must be done to improve the de-
cision model. Improvements can be obtained by
adding a dynamic fishing stock model, by increa-
sing the space of decision in the VESSEL and PORT
agents’ types a nd, at the same time, testing other
multi-criteria decision-m a king mechanisms, such as
the ones based on comparing preferences.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
208

ACKNOWLEDGEMENTS
This work was funded by FEDER (85%) and by the
Azorean Regional Funds (15%), trough the Operati-
onal Program Azores 2020, in the scope of the pro-
ject ACORES-01-0145- FE D ER-000049. We thank
Luis Ro drigues and Hugo Diogo for sharing the
data u sed in this study, and the anonymous re-
viewers for their valuable comments and suggesti-
ons. AR acknowledges Fundac¸˜ao para a Ciˆenc ia
e Tecnologia (FCT), through postdoctoral grant
(SFRH/BPD/102494/2014) and the strategic pro je c t
UID/MAR/0429 2/2013 granted to MARE.
REFERENCES
Abar, S., Theodoropoulos, G. K., Lemarinier, P., and
O’Hare, G. M. (2017). Agent based modelling and si -
mulation tools: A review of the state-of-art software.
Computer Science Review, 24:13 – 33.
Adam, C., Taillandier, P., and Dugdale, J. (2017). Compa-
ring Agent Architectures in Social Simulation: BDI
Agents versus Finite-state Machines. In 50th Hawaii
International Conference on System Sciences , page
7p., Waikoloa, United States.
An, L. (2012). Modeling human decisions in coupled hu-
man and natural systems: Review of agent-based mo-
dels. Ecological Modelling, 229:25 – 36. Modeling
Human Decisions.
Balke, T. and Gilbert, N. (2014). How do agents make de-
cisions? a survey. Journal of Artificial Societies and
Social Simulation, 17(4):13.
Bastardie, F., Nielsen, J. R., Eigaard, O. R., Fock, H. O.,
Jonsson, P., and Bartoli no, V. (2015). Competition for
marine space: modelling the baltic sea fisheries and
effort displacement under spatial restrictions. ICES
Journal of Marine Science, 72(3):824–840.
Bastardie, F., Nielsen, J. R., and Miethe, T. (2013). Dis-
place: A dynamic, individual-based model for spatial
fishing planning and effort displacement - integrating
underlying fish population models. 71:366–386.
Groeneveld, J., M¨uller, B., Buchmann, C., Dressler, G.,
Guo, C., Hase, N., Hoffmann, F., John, F., Klas-
sert, C., Lauf, T., Liebelt, V., Nolzen, H., Pannicke,
N., Schulze, J., Weise, H., and Schwarz, N. (2017).
Theoretical foundations of human decision-making in
agent-based land use models – a review. Environmen-
tal Modelling & Software, 87:39 – 48.
Kennedy, W. G. (2012). Modelling Human Behaviour in
Agent-Based Models, pages 167–179. Springer Net-
herlands, Dordrecht.
Magessi, N. T. and Antunes, L. (2013). Modelling agents’
risk perception. In Omatu, S., Neves, J., Rodriguez,
J. M. C., Paz Santana, J. F., and Gonzalez, S. R.,
editors, Distributed Computing and Artificial Intelli-
gence, pages 275–282, Cham. Springer International
Publishing.
Mandrik, C. and Bao, Y. (2005). Exploring the concept and
measurement of general risk aversion. 32:531–539.
Menezes, G., Diogo, H., and Giacomello, E. (2013). Re-
construction of demersal fisheries history on the con-
dor seamount, azores archipelago (northeast atlantic).
Deep Sea Research Part II: Topical Studies in Ocea-
nography, 98:190–203.
Morato, T., Lemey, E., Menezes, G., Pham, C. K., Brito,
J., Soszynski, A., Pitcher, T. J., and Heymans, J. J.
(2016). Food-web and ecosystem structure of the
open-ocean and deep-sea environments of the azores,
ne atlantic. Frontiers in Marine Science, 3:245.
Pitcher, T. J., Clark, M. R., Morato, T., and Watson, R.
(2007). Seamounts: ecology,fisheries and conserva-
tion., volume 12.
Pitcher, T. J., Clark, M. R., Morato, T., and Watson, R.
(2010). Seamount fisheries: Do they have a f uture?
Oceanography (Special Issue on Mountains in the
Sea), 23(1):134 – 144.
Said, Y. B., Kanzari, D., and Bezzine, M. (2018). A Be-
havioral and Rational Investor Modeling to Explain
Subprime Crisis: Multi Agent Systems Simulation in
Artificial Financial Markets, pages 131–147. Sprin-
ger International Publishing, Cham.
Tisue, S. and Wilensky, U. (2004). Netlogo: A simple envi-
ronment for modeling complexity.
Tomic, V., Marinkovic, Z., and Janosevic, D. (2011). Pro-
methee method implementation with multi-criteria de-
cisions. 9:193–202.
SIMSEA: A Multiagent Architecture for Fishing Activity in a Simulated Environment
209
