
Firearm Detection using Convolutional Neural Networks
Rodrigo Fumihiro de Azevedo Kanehisa and Areolino de Almeida Neto
Federal University of Maranhao (UFMA), São Luís, Brazil
Keywords:
Firearm Detection, Computer Vision, Darknet YOLO.
Abstract:
This papers studies the application of the YOLO algorithm to create a firearm detection system, demonstrating
its effectiveness in this task. We also constructed a dataset based on the website Internet Movie Firearm
Database (IMFDB) for this study. Individuals carrying firearms in public places are a strong indicator of
dangerous situations. Studies show that a rapid response from law enforcement agents is the main factor in
reducing the number of victims. However, a large number of cameras to be monitored leads to an overload of
CCTV operators, generating fatigue and stress, consequently, loss of efficiency in surveillance. Convolutional
neural networks have been shown to be efficient in the detection and identification of objects in images, having
sometimes produced more accurate and consistent results than human candidates.
1 INTRODUCTION
An Individual carrying firearms in public settings is a
strong indicator of possible dangerous situations. Re-
cently there has been an increase in the number of in-
cidents in which individuals or small groups make use
of firearms in order to injure or kill as many people as
possible. Among the most notable of these events,
called mass shootings, are the Columbine massacre
(USA, 37 victims), the attack on Uotya Island (Nor-
way, 179 victims), the Realengo massacre (Brazil, 13
victims) and that one against the Charlie Hebdo news-
paper (France, 23 victims).
Surveillance systems such as closed-circuit televi-
sion (CCTV) and drones are becoming increasingly
common. Research shows that the installation of
CCTV systems helps to combat mass shooting inci-
dents (Kayastha, 2016). Scotland Yard used CCTV
images as evidence in 90% of homicide cases in 2009
(Barrett, 2013). In England, it is estimated that there
are around 5 million security cameras nationwide
(Barrett, 2013). Despite helping to combat crime, the
large number of cameras leads to a huge overhead for
its operators.
Automatic surveillance systems have begun to
emerge in recent years, mainly for the use in intelli-
gent transportation systems (ITS). These include traf-
fic surveillance (Bramberger et al., 2003) and vehicle
recognition (Baran et al., 2015). Another application
of cameras in surveillance can be on security, then a
system capable of automatically detecting firearms in
images would enable a faster and more efficient re-
sponse from law enforcement agents. One of the
most promising techniques for the creation of auto-
matic surveillance systems is machine learning and
computer vision.
This paper is divided into five sections. In addition
to this introductory section, it is presented the theoret-
ical basis necessary for understanding this work in the
following section. In the third section, the methodol-
ogy and the tools used are discussed. In the fourth
one, the results obtained during this study are pre-
sented. And finally, in the fifth section, conclusions
of this research are discussed.
2 RELATED WORK
(Verma and Dhillon, 2017) propose the use of con-
volutional neural networks (CNN) for detection of
firearms. The training was made with the use of
transfer learning. The tests were performed with
a dataset built from the Internet Movie Firearm
Database (IMFDb). The work could detect and clas-
sify three types of guns, pistols, revolvers and shot-
guns.
In (Bertozzi, 2017), a method was proposed for
detection of firearms and potentially dangerous situ-
ations using CNN, in addition to proposing the use
of proprietary hardware to capture the images. This
work was aimed to detect and react to the presence of
firearms or other weapons when used in a threatening
way.
Kanehisa, R. and Neto, A.
Firearm Detection using Convolutional Neural Networks.
DOI: 10.5220/0007397707070714
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 707-714
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
707

In (Ardizzone et al., 2014), bottom-up saliency
map and top-down saliency map techniques were
used to create probabilistic models for the position
of firearms in position-based images of the face of a
person carrying it, also with the use of an extracted
dataset from the site IMFDb.
In (Grega et al., 2016), a method was proposed for
automatic detection of dangerous situations in CCTV
systems, through the use of image processing and ma-
chine learning. Sliding window techniques, fuzzy
classifiers and canny detectors were used for detec-
tion of knives and firearms in a video. In addition
to the detection system, the authors constructed and
made available their dataset.
3 BACKGROUND
3.1 Darknet - YOLO
Darknet YOLO is a state-of-the-art object-detection
system based on convolutional neural networks (Red-
mon and Farhadi, 2016). It was initially developed
using Darknet, an open-source neural network frame-
work written in C and CUDA (Redmon, 2016). Tra-
ditional classifiers use sliding window techniques or
selective search to find candidate regions and iden-
tify the desired object. In this way, regions with high
probabilities are considered detections (Redmon and
Farhadi, 2016).
Unlike other methods, YOLO does not re-
purposes a classifier for detection. This algorithm
looks at the image only once. To perform the de-
tection, the image is subdivided into multiple sub-
regions. For each sub-region, five bounding boxes are
considered and the probabilities of each of them con-
tain an object are calculated. By looking only once to
the image, YOLO executes a much faster detection,
being a hundred times faster than Fast R-CNN (Red-
mon and Farhadi, 2016). Figure 1 demonstrates the
detection process.
Despite its efficiency, YOLO has some limita-
tions. YOLO imposes strong spatial constraints by
using bounding box predictions since each sub-region
provides a limited number of bounding boxes, each of
which can only have one class. This spatial limitation
limits the number of near objects this model can de-
tect. It also has difficulties with small objects appear-
ing in groups, such as flocks of birds (Redmon et al.,
2016).
Figure 1: Operation of Darknet YOLO.
4 METHODS
4.1 Dataset
IMFDb is an on-line database of firearms images used
or displayed on films, television shows, video games
and animes. There are included actor related articles
and some famous characters, such as James Bond,
listing specific weapons associated with his works
(Bourjaily, 2009).
The site also includes an image hosting sec-
tion similar to Wikimedia Commons, which contains
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
708

Figure 2: Example of an IMFDb article.
firearm photos, manufacturer logos, screenshots and
related art (Bourjaily, 2009). From this session, the
dataset used for positive cases was extracted. About
20,000 images were extracted, of which approxi-
mately 4600 were used since the dataset annotation
process was manual.
4.2 Scrapy
To construct the dataset, a web crawler was devel-
oped using the Scrapy library, which is an open source
Python library used for scraping sites, extraction of
structured data from web pages and web crawling.
It can be used for a large number of applications
such as data mining, archiving or information pro-
cessing. It is currently maintained by Scrapinghub
Ltd., a web-scraping development and services com-
pany (Korobov, 2015).
The architecture of the scrapy system is based on
the construction of spiders, which are entities respon-
sible for navigation within the provided URLs. In ad-
dition to browsing and accessing links, a spider also
processes the information it finds filtering and down-
loading it. A spider was constructed for this paper
that searches for images and downloads them inside
the IMFDb, looking for pages of specific models of
firearms.
The criterion used for the search was the popu-
larity of firearms models. The web-crawler looked
for guns such as AK-47 or M-16 assault rifles (UN.
SECRETARY-GENERAL et al., 1997), Colt M1911,
Glock and Sig pistols, shotguns such as Remington
M870, Mossberg 500 (Brauer, 2013). Often, works
containing these models also contained other models
not specified during searches. In this way, the dataset
contains images with a wide variety of models.
4.3 Google Images Download
For the creation of the dataset of negative images, the
Python script Google Images Download was used.
This tool is a command line program to search for
keywords or key phrases in Google Images and op-
tionally download them (Vasa, 2018).
Figure 3: Examples of negative images.
The images sought were allusions to firearms,
both in shape and texture, such as hair dryers and
handheld power drills. Items incorrectly classified
during preliminary tests were also searched such as
umbrellas or metal handrails. The dataset of negative
cases acquired contained 1939 images. In this way,
a negative dataset was obtained to designate objects
that should not be classified as firearms.
4.4 Dataset Annotation
After the acquisition of the dataset, it was prepared
using the tool BBox-Label-Tool (Shi Qiu, 2016) to
Firearm Detection using Convolutional Neural Networks
709

mark the ROI (Regions of Interest) in the images.
This process was performed only for the set of pos-
itive images since in the set of negative images there
is no ROI.
Only images containing small arms, by the United
Nations definition in the SALW protocol (Small Arms
and Light Weapons), were considered. This cate-
gory includes handguns (pistols and revolvers) and
long guns (submachine guns, carbines, rifles, shot-
guns and light machine guns) (UN. SECRETARY-
GENERAL et al., 1997) (Small Arms Survey et al.,
2007). Grenade launchers, rocket launchers, vehicle-
mounted weapons and explosives were ignored.
Figure 4: Dataset annotation tool.
For each image, a text file with the same name was
generated. This file contained the number of labels in
the image and the coordinates of the bounding boxes
on each of these. In some cases, there are no labels for
an image because they did not meet a minimum qual-
ity criterion, having a poor resolution or bad lighting.
These text files were saved with zero labels and were
then the images eliminated from the positive dataset.
From the 20 thousand images obtained, only 4646
were marked. The process of marking ROI on the
images was executed manually. Each image was ana-
lyzed individually and the regions containing firearms
were marked. For this reason, although 20 thousand
images were downloaded, only 4646 were used.
4.5 Network Training
The dataset was randomly divided into two groups,
training and testing. About 90% (5916 images) of
the images were used for training and 10% (669 im-
ages) for testing. The learning rate used was 0.0001,
the momentum of 0.9 and the decay of 0.0005. The
batch size was 64 images and the input layer size was
416 × 416. Finally, anchors were generated for the
training process based on the positive dataset, using
the k-means clustering algorithm.
The network architecture used in this paper was
based on the architecture used by (Redmon and
Farhadi, 2016) in the PASCAL VOC challenge (Ev-
eringham et al., 2015). This architecture was chosen
because it proved to be efficient for the classification
and detection of objects during the mentioned chal-
lenge.
During the training process, each epoch took an
average of 5.5 seconds. Up to the first 1000 epochs,
a checkpoint of the network was saved for every 100
epochs, after the first 1000 epochs, this interval was
increased to 1000 epochs. The graph in Figure 5
shows the network loss function during training.
Figure 5: Loss function of the training process after 13 thou-
sand iterations.
5 TESTS AND EVALUATIONS
In this session, the results of this work are presented.
These tests were performed to analyze the perfor-
mance of the methodology. The system was evalu-
ated in two main criteria: classification and detection.
The classification problem consists in classify images
by the presence of firearms. In the detection problem,
the system tries to identify the location of guns, in ad-
dition to their presence in the image. The dataset used
for testing contains around 10% of the images, there
were a total of 669 images, 446 were positive and 223
were negative, containing a total of 554 marked ob-
jects.
5.1 Metrics
The classification problem was evaluated in a tradi-
tional way. For each test image, the system aimed to
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
710

identify the presence or absence of a firearm. Sensi-
tivity, specificity, accuracy and ROC curve (Receiver
Operating Characteristic) were used to evaluate the
classification (Fawcett, 2006).
For the detection problem, the PASCAL VOC
challenge metrics were used (Everingham et al.,
2008). These metrics were chosen to generate an ob-
jective comparison criterion of the technique used in
this work with future techniques.
The intersection over union (IOU), also known as
the Jaccard index, is the computation of the bounding
box bounding box intersection of ground truth. This
metric is widely used in object detection challenges
such as PASCAL VOC (Everingham et al., 2010) and
for evaluation of algorithms like HOG + SVM and
CNN’s (Rosebrock, 2016).
In the PASCAL VOC challenge, an IOU value
of 50% is used, with any detection with confidence
above this value being considered a match, i.e., a pos-
itive classification (Everingham et al., 2015). Values
with IOU less than 50% are considered errors, even if
they contain the object to be detected. The detected
bounding box must have the same label of the ground
truth and the region must be detected only once to be
considered a true positive (Everingham et al., 2010).
5.2 Results
In this session, the results obtained in each of the ex-
periments are presented. These tests were performed
to analyze the performance of the methodology used.
The dataset used for testing consist of a total of 669
images, 446 were positive and 223 were negative,
containing a total of 554 marked objects.
Initially, tests were performed with the training
done using only images with positive cases. This net-
work was trained for six thousand epochs. These tests
were done to evaluate the detection efficiency of the
tool and to check which objects were detected incor-
rectly. After that, the dataset of negative cases was
constructed, based on the results obtained in the pre-
liminary tests and subsequent training was performed.
This training was done for 13 thousand epochs.
The application proved to be efficient in detect-
ing small arms of all types and models. Demonstrat-
ing the ability to locate objects even when a partial
occlusion occurs. In addition to being able to de-
tect all types of small arms, the system was able to
detect weapons such as anti-aircraft artillery and ve-
hicle mounted guns, as well as rocket launchers and
grenade launchers.
The application is also able to distinguish ’L’
shaped objects, such as drills and hair dryers, com-
monly compared to firearms. This is true even when
they are welded so as to refer to the carrying of
weapons.
The results obtained during the image classifica-
tion tests were promising. From 669 test images, 644
were correctly classified: 427 were true positive and
217 were a true negative. From those incorrectly clas-
sified, there were six false positives and 19 false nega-
tives, these results can be seen in the table 1. The val-
ues obtained were 95.73% of sensitivity, 97.30% of
specificity and 96.26% of accuracy. The ROC curve
drawn from these results can be seen in Figure 6.
Table 1: Confusion Matrix.
Predicted /Real P N
P’ 427 6
N’ 19 217
Figure 6: ROC curve.
Figure 7: Precision and Recall.
The Mean Average Precision (MAP) value was
70.72%, comparable to state-of-the-art applications
for detecting objects for a single class, this result
can be seen in Figure 7. It can be emphasized
that in some cases, the error occurred due to dif-
ferences of IOU between the bounding box and the
ground truth, but as can be seen in the images be-
low, the system is capable of performing useful de-
tections even in this situation. Other cases considered
Firearm Detection using Convolutional Neural Networks
711
errors by this methodology were cases of detection
of previously unmarked weapons in the dataset oc-
curred, such as rocket launchers and vehicle mounted
weapons. These results, although correct, reduce the
MAP within the metric used.
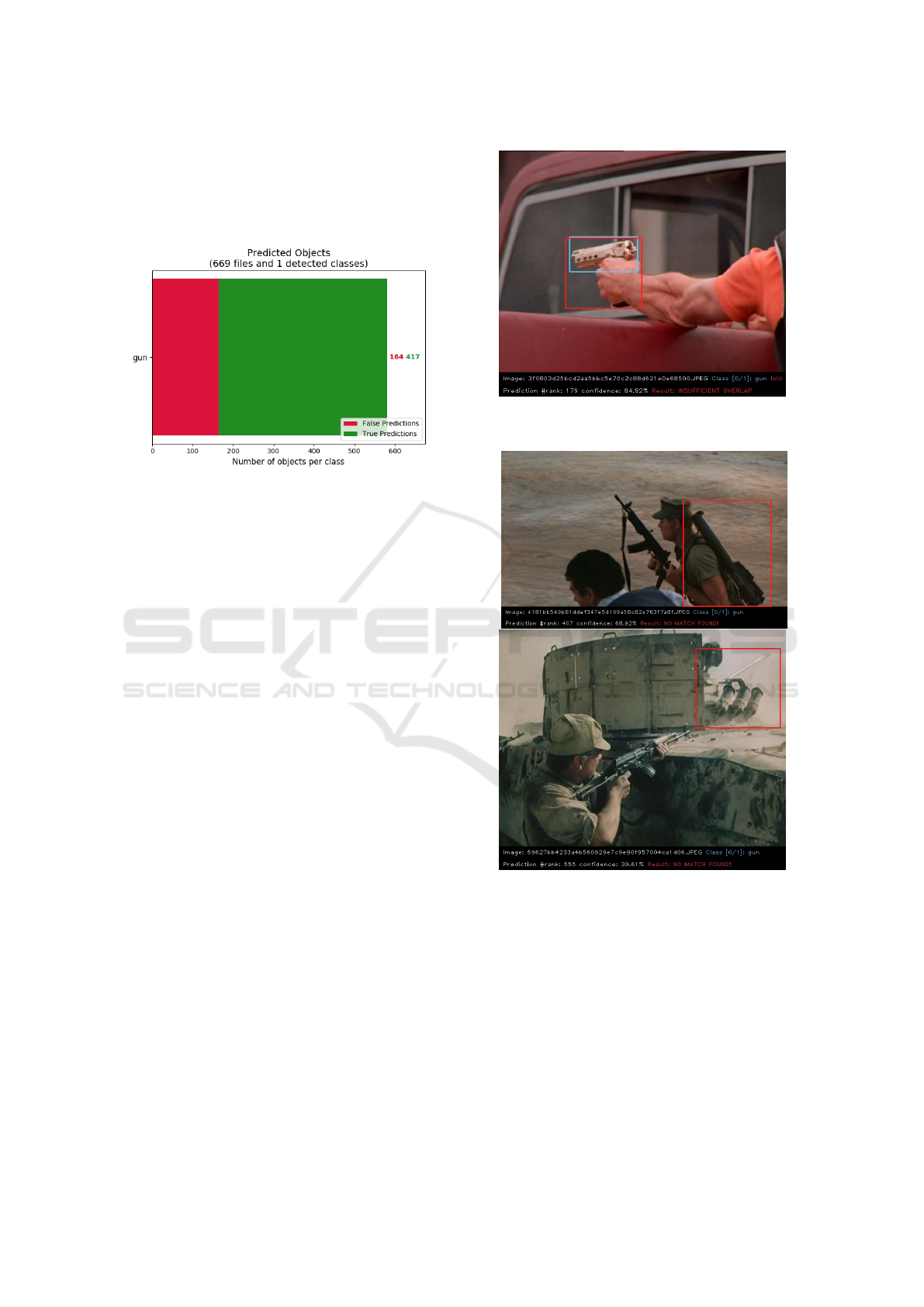
Figure 8: Object detection result chart.
In the images below, some of these cases are
demonstrated. The regions predicted by the system
are indicated by the red box and the region of ground
truth the blue box. In the Figure 9 there is an exam-
ple of a valid detection, however, with IOU less than
50%.
The Figure 10 demonstrates cases of objects not
marked, by not being classified as small arms, which
were detected by the system. These images consider
only individual detections, so only one detected re-
gions are highlighted in each image even when there
are other visible firearms such as Figure 10.
5.3 Firearm Detection Demonstrations
The following images demonstrate the results
achieved with this system. The Figure 11 contains
a wall with multiple replicas of firearms. From the 17
objects present, 9 were correctly detected. Failures
occur due to limitations of this technique with clus-
ters of objects in close proximity.
In Figure 12, there are two hair dryers alluding to
firearms and a weapon under partial occlusion. This
test demonstrates the system’s capacity to differenti-
ate guns from objects with a similar shape. In addi-
tion to showing the technique’s robustness to partial
occlusion.
In Figure 13, an almost totally occluded revolver
is detected. Only part from the barrel, grip and trigger
guard are visible. This image shows the system’s abil-
ity to identify objects almost completely occluded.
The following images demonstrate cases of er-
ror. In Figure 14, it can be seen that both guns were
detected correctly, however, part of the motorcycle’s
Figure 9: Demonstration of a valid detection, but with a low
MAP value.
Figure 10: Demonstrations of detection of correct and valid
but unmarked objects.
handlebar and suspension were incorrectly classified
as a firearm. This is a common error case when there
are metal or L-shaped objects close to hands.
Detection failures occurred in situations where
there are metallic or frosted objects, usually close
proximity or overlapping with hands, especially if
these objects are elongated. The faults also oc-
curred with ’L’ shaped, metallic, polished or dark
objects, usually in contrast with a light background.
Among the objects generating false positives are
metal handrails when near or covered by hands, poles
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
712

Figure 11: Demonstration of positive results in an environ-
ment with multiple objects.
Figure 12: Demonstration of positive results in an environ-
ment with partial occlusion and with alluding objects.
Figure 13: Demonstration of positive results in a environ-
ment with partial occlusion.
and metal structures containing protrusions.
The Figure 15 shows the rifle correctly detected,
however, the side railing was also highlighted. Again
detection occurred with an elongated metal object.
Although some cases of error have occurred, these
are minimal and do not make the system unfeasible,
given the sensitivity, specificity and accuracy reached
respectively 95.73%, 97.30%, 96.26%, evidencing
the system’s ability to identify firearm-containing im-
ages with great efficiency, as well a MAP rate of 70%,
shows the system’s efficiency in locating objects.
Figure 14: Demonstration of an error case.
Figure 15: Demonstration of an error case.
6 CONCLUSIONS
This work demonstrated the feasibility of using
CNN’s to create a generic firearm detector. The
method used proved to be robust and able to cor-
rectly detect weapons that were not presented during
the training (different models and in many environ-
ments). The dataset constructed for this work proved
sufficient variation to allow the system to be able to
understand the concept of a firearm.
The results obtained, 95.73% of sensitivity,
97.30% of specificity, 96.26% of accuracy and 70%
of MAP, demonstrate the technique’s efficiency. The
technique used stands out for its speed of detection,
capable of being executed in real time. Another con-
tribution is the first application of this technique for
detecting firearms.
Despite the system’s limitations, when studying
the cases of errors, one can realize that these are the
result of a relatively homogeneous dataset in terms of
image quality and acquisition method. This situation
can be overcome by the inclusion of lower quality im-
ages or acquired with equipment for use in a real ap-
plication.
Firearm Detection using Convolutional Neural Networks
713

Based on achieved results with this technique, it
is possible to implement this system, for video input
streams generated by security cameras, allowing use
in real-time environments. There are also plans to use
the detector in its current state for automated anno-
tation of the remaining dataset, as well as including
images from other sources such as security cameras
and other capture methods such as infrared cameras,
night vision and x-ray. The dataset can be found at
the link in the footnote
1
.
ACKNOWLEDGEMENT
The authors acknowledge FAPEMA, CAPES and
CNPq for financial support in the development of this
work. Special thanks to UFMA and MecaNET for
technical support.
REFERENCES
Ardizzone, E., Gallea, R., La Cascia, M., and Mazzola, G.
(2014). Combining top-down and bottom-up visual
saliency for firearms localization. In Signal Process-
ing and Multimedia Applications (SIGMAP), 2014 In-
ternational Conference on, pages 25–32. IEEE.
Baran, R., Glowacz, A., and Matiolanski, A. (2015). The ef-
ficient real-and non-real-time make and model recog-
nition of cars. Multimedia Tools and Applications,
74(12):4269–4288.
Barrett, D. (2013). One surveillance camera for every 11
people in britain, says cctv survey. The Telegraph, 10.
Bertozzi, N. (2017). Advisors: Susan Jarvis. PhD thesis,
Worcester Polytechnic Institute.
Bourjaily, P. (2009). Bourjaily: The internet movie firearms
database | field & stream. Retrieved in June, 04, 2018
from https://www.fieldandstream.com/blogs/gun-
nut/2009/04/bourjaily-internet-movie-firearms-
database.
Bramberger, M., Pflugfelder, R. P., Maier, A., Rinner, B.,
Strobl, B., and Schwabach, H. (2003). A smart cam-
era for traffic surveillance. In Proceedings of the first
workshop on Intelligent Solutions in Embedded Sys-
tems, pages 153–164.
Brauer, J. (2013). The us firearms industry.
Everingham, M., Eslami, S. M. A., Van Gool, L., Williams,
C. K. I., Winn, J., and Zisserman, A. (2015). The pas-
cal visual object classes challenge: A retrospective.
International Journal of Computer Vision, 111(1):98–
136.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2008). The pascal visual object
classes challenge 2007 (voc 2007) results (2007).
1
https://github.com/Rkanehisa/Firearm_Detection
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
Fawcett, T. (2006). An introduction to roc analysis. Pattern
recognition letters, 27(8):861–874.
Grega, M., Matiola
´
nski, A., Guzik, P., and Leszczuk, M.
(2016). Automated detection of firearms and knives
in a cctv image. Sensors, 16(1):47.
Kayastha, R. (2016). Preventing mass shooting through co-
operation of mental health services, campus security,
and institutional technology.
Korobov, M. (2015). Scrapy, a fast high-level web crawling
& scraping framework for python. . Retrieved in June,
26 ,2017 from https://github.com/scrapy/scrapy.
Redmon, J. (2013–2016). Darknet: Open source neural net-
works in c. http://pjreddie.com/darknet/.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 779–
788.
Redmon, J. and Farhadi, A. (2016). Yolo9000: Better,
faster, stronger. arXiv preprint arXiv:1612.08242.
Rosebrock, A. (2016). Intersection over union (iou) for ob-
ject detection - pyimagesearch. Retrieved in May, 09,
2018 from https://bit.ly/2QWgBoa.
Shi Qiu, P. (2016). Bbox-label-tool. Retrieved in June, 26,
2017 from https://github.com/puzzledqs/BBox-Label-
Tool.
Small Arms Survey, G., of International Studies (Geneva,
G. I., and Switzerland) (2007). Small arms survey
2007: guns and the city. Cambridge University Press.
UN. SECRETARY-GENERAL, UN. Group of Experts on
the Problem of Ammunition and Explosives, Chair-
person, of Experts on the Problem of Ammunition,
U. G., and Explosives (1997). General and complete
disarmament: Small arms. Retrieved in May, 14, 2018
from https://bit.ly/2DEkhrU.
Vasa, H. (2018). Google images down-
load. Retrieved in April, 21, 2018 from
https://github.com/hardikvasa/google-images-
download.
Verma, G. K. and Dhillon, A. (2017). A handheld gun de-
tection using faster r-cnn deep learning. In Proceed-
ings of the 7th International Conference on Computer
and Communication Technology, pages 84–88. ACM.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
714
