
4-valued Logic for Agent Communication with Private/Public
Information Passing
Song Yang, Masaya Taniguchi and Satoshi Tojo
Japan Advanced Institute of Science and Technology, Japan
Keywords:
Agent Communication, Rational Agent, Dynamic Epistemic Logic, Modal Logic, 4-valued Logic.
Abstract:
Thus far, the agent communication has often been modeled in dynamic epistemic logic, where each agent
changes his/ her belief, restricting the accessibility to possible worlds in Kripke semantics. Prior to the mes-
sage passing, in general, the sender should be required to believe the contents of the message. In some
occasions, however, the recipient may not believe what he/ she has heard since he/ she may not have enough
background knowledge to understand it or the information may be encrypted and he/ she may not know how
to decipher it. In this paper, we generalize those messages that require special knowledge as private informa-
tion and formalize that the recipient does not change his/ her belief receiving such private messages. Then,
we distinguish the validity of the information from the belief change of the recipient; that is, even though
the communication itself is held and the information is logically contradictory to his/ her original belief, the
recipient may not change his/ her belief. For this purpose, we employ 4-valued logic where each proposition
is given 2 (usual true and false) times 2 (private or public information or not) truth value.
1 INTRODUCTION
In van Ditmarsch et al. (2008), there have been dis-
tinguished the following difference in agent commu-
nication.
• public announcement: every agent receives the
same information.
• whisper: other agents notice there happens an in-
formation transmission among others but the con-
tents cannot be seen.
• channel: one to one communication: other agents
cannot notice there has been an information trans-
mission.
In addition, in this work we would distinguish the
public/ private message passing, that is, the recipi-
ent cannot read nor understand what is written. The
most probable case is that the information is mean-
ingless for the recipient because he/she does not have
enough background knowledge to understand it, e.g.,
the message might be written in an unknown foreign
language. The second most probable case is that the
message is encrypted and the recipient cannot deci-
pher it; in the latter case a simple tip or a password
may suffice to read it. In either way, we can general-
ize these cases into a category, that is, private infor-
mation. Here, we distinguish the following two cate-
gories.
• the contents of the message is only privately un-
derstood.
• the contents of the message is publicly under-
stood.
In this paper, we distinguish these two, introduc-
ing 4-valued logic; that is, we distinguish if the mes-
sage passing is successful and the recipient surely has
received the message (T/F), and if his/her belief is af-
fected even though the message might contradict to
the belief of the recipient, since the agent could not
decipher the contents. Here, the communication may
fail in three cases shown in Figure 1.
In the following Section 2, we summarize the fun-
damental mechanism of belief change by dynamic
epistemic logic (DEL), that is by the accessibility re-
striction in Kripke semantics. In Section 3, we survey
the history and application of 4-valued logic. In Sec-
tion 4, we revise the belief change by private/ public
information passing, and show the recursion axiom to
the ordinary DEL, that is sound and complete. Finally
in Section 5, we summarize our contribution.
54
Yang, S., Taniguchi, M. and Tojo, S.
4-valued Logic for Agent Communication with Private/Public Information Passing.
DOI: 10.5220/0007400000540061
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 54-61
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
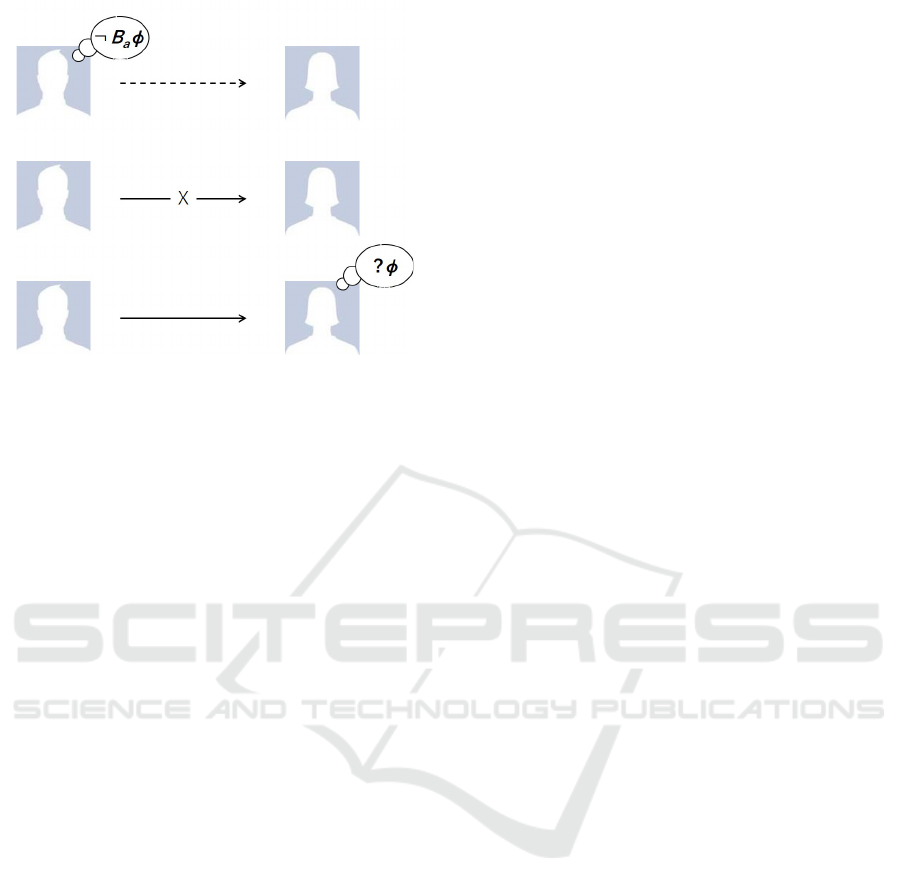
Figure 1: Three different miscommunication; top: the
sender does not believe the contents of the information,
middle: there is no channel between two agents, bottom:
the recipient cannot decipher the contents.
2 SEMI-PRIVATE
ANNOUNCEMENT IN DEL
Hatano et al. (2015) showed a modal epistemic lan-
guage which has formalized agents’ belief and chan-
nels.
2.1 Syntax
Let PROP = { p, q,.. .} be a finite set of propositional
variables and G = {a,b,. . .} a finite set of agents. The
language is generated by the following Backus-Naur
form:
α ::= p | ¬α | α ∨ α | c
ab
ϕ ::= α | B
a
α | [α↓
a
b
]ϕ | ¬ϕ | ϕ ∨ ϕ
where p ∈ PROP,a ∈ G, b ∈ G and α is an objective
(non-modal) formula.
Here, c
ab
means “There is a channel from agent a
to agent b”, B
a
ϕ means “agent a believes ϕ”. [α↓
a
b
]ϕ
will be defined in section 2.3.
2.2 Semantics
A Kripke model M is a tuple:
M = (W,R
G
,C
G
,V )
where W is a non-empty set of worlds, G is a non-
empty set of agents, R
G
= {R
a
| a ∈ G} and R
a
⊂ W ×
W is an accessibility of agent a on W, C
G
= {C
ab
| a ∈
G,b ∈ G} and C
ab
⊆ W is a channel relation, and V :
Prop → P(W ) is a valuation function. Here, C
aa
= W
for all a ∈ G because each agent must have a channel
to itself.
Given any model M, any world w ∈ W and any
formula ϕ, we define the satisfaction relation induc-
tively as follows:
M,w |= p iff w ∈ V (p)
M,w |= c
ab
iff w ∈ C
ab
M,w |= ¬ϕ iff M,w 6|= ϕ
M,w |= ϕ ∨ ψ iff M,w |= ϕ or M, w |= ψ
M,w |= B
a
ϕ iff ∀u ∈ W ((w,u) ∈ R →
M,u |= ϕ)
Here, we say ϕ is valid on M if M,w |= ϕ for any
w ∈ W, and ϕ is valid in a class of Kripke models if ϕ
is valid on any M in the class. Then, it is clear that in
Table 1, all of the axioms are valid and all of the rules
preserve validity on M.
Table 1: Hilbert-style Axiomatization K
c
of Static Logic.
(Taut) ϕ, ϕ is a tautology.
(K
B
) B
a
(ϕ → ψ) → (B
a
ϕ → B
a
ψ) (a ∈ G)
(Selfchn) c
aa
(a ∈ G)
(MP) From ϕ and ϕ → ψ, infer ψ
Nec
B
From ϕ, infer B
a
ϕ (a ∈ G)
2.3 Semi-private Announcement
We often use public announcement to express the
communication between agents. However, in general,
most of the announcements are made between a group
of agents, so that only the agent in the group can get
the message, while others cannot know what they are
talking. This kind of announcement is called semi-
private announcement (Sano and Tojo (2013)).
Here, we use the dynamic operator [ϕ↓
a
b
], which
means “after the agent a sent a message ϕ to the
agent b via a channel”, to express the semi-private
announcement. Then, [ϕ↓
a
b
]ψ stands for ‘after the
agent a sent a message ϕ to the agent b via a chan-
nel, ψ holds”. We provide the semantic of [ϕ↓
a
b
]ψ on
a Kripke model M = (W,R
G
,C
G
,V ) as follows:
M,w |= [ϕ↓
a
b
]ψ iff M
ϕ↓
a
b
,w |= ψ
where M
ϕ↓
a
b
= (W,R
0
G
,C
G
,V ) and R
0
i
∈ R
0
G
is defined
as:
• If i = b, for all x ∈ W ,
R
0
b
(x) :=
(
R
b
(x) ∩ JϕK
M
if M,x |= c
ab
∧ B
a
ϕ
R
b
(x) otherwise.
• Otherwise, R
0
i
:= R
i
.
Here, JϕK
M
is called the truth set of ϕ in M, which
is defined as follows:
JϕK
M
= {w ∈ W | M,w |= ϕ}
4-valued Logic for Agent Communication with Private/Public Information Passing
55

Semantically speaking, [ϕ↓
a
b
] revises agent b’s be-
lief when agent a believes ϕ, and there is a channel
from a to b. Otherwise, agent b’s belief will not be
restricted (Barwise and Seligman (1997)). And it is
easy to see that others than b will not revise their be-
lief while they don’t get the message ϕ. Here, all of
the agents are considered as believable and receivable,
while they can only tell the truth and they receive any
message made by others (Seligman et al. (2011)).
In the syntax including [ϕ↓
a
b
]ψ, ψ is valid on the
class of all finite Kripke models iff ψ is a theorem in
K
c
[ ·↓
a
b
] of Table 2 as follows:
Table 2: Hilbert-style Axiomatization K
c
[ ·↓
a
b
].
In addition to all the axioms and rules of K
c
, we add:
[ϕ↓
a
b
]p ↔ p
[ϕ↓
a
b
]c
cd
↔ c
cd
[ϕ↓
a
b
]¬ψ ↔ ¬[ϕ↓
a
b
]ψ
[ϕ↓
a
b
]ψ ∧ χ ↔ [ϕ↓
a
b
]ψ ∧ [ϕ↓
a
b
]χ
[ϕ↓
a
b
]B
c
ψ ↔ B
c
ψ(c 6= b)
[ϕ↓
a
b
]B
b
ψ ↔ (c
ab
∧ B
a
ϕ → B
b
(ϕ → ψ))∧
(¬(c
ab
∧ B
a
ϕ) → B
b
ψ)
(Nec
[ϕ↓
a
b
]
) From ψ, infer [ϕ↓
a
b
]ψ
The prove is shown in Hatano et al. (2015).
3 4-VALUED MODAL LOGIC
In classical logic, a proposition has only two possi-
ble truth values, which are usually called true and
false. In other words, if a proposition is not true, it
is false, and vice versa. However, sometimes a propo-
sition is not true, while it is not false. For example,
we cannot say that the sentence “There is no alien in
the universe” is true, while we cannot say it is false.
So we can see sometimes two possible values are not
enough.
To resolve this problem, many-valued logic whose
proposition has more than two truth values has been
studied. The sum of possible truth values can be
three, four, any natural number more than three, and
even infinite. Malinowski (2014) added a new possi-
ble truth value Undefined, to mark indeterminacy of
some proposition. Bo
ˇ
cvar(Ciucci and Dubois (2013))
added a truth degree 0.5, whose reading as “mean-
ingless” or “senseless”. Cattaneo and Nistic
`
o (1989)
use a structure hΣ, 0, ≤,
0
,
∼
i to express the third
value. Łukasiewicz provided an infinite-valued logic
that considered the truth value as a real number be-
tween 0 and 1. In Łukasiewicz logic, the number
of truth value shows the probability that the formula
is false (Giles (1976)). In this paper, we consider
4-valued logic with Belnapian truth values(Odintsov
and Wansing (2010)).
In 4-valued logic, the four values are usually
called true, false, neither and both. Belnap considered
the valued as follows:
• the value of p is True(T) means that the computer
is told that p is true.
• the value of p is False(F) means that the computer
is told that p is false.
• the value of p is Neither(N) means that the com-
puter is not told anything about p.
• the value of p is Both(B) means that the computer
is told that p is both true and false(perhaps from
different sources, or so on).
Odintsov and Wansing (2017) shows that 4-valued
logic can also be used in modal logic, whose oper-
ators includes and ♦.(Blackburn et al. (2002))
3.1 Language and Truth-table
To define the language of Belnap-Dunn Modal Logic
BK
, first we consider the language L
where
L
:= {∧,∨, →,⊥,∼,}
where ∼ stands for “strong negation” and other oper-
ators are defined as follows:
¬ϕ := ϕ → ⊥, ϕ ↔ ψ := (ϕ → ψ) ∧ (ψ → ϕ)
♦ϕ :=∼ ∼ ϕ, ϕ ⇔ ψ := (ϕ ↔ ψ) ∧ (∼ ϕ ↔∼ ψ)
Then, we can define the language BK
as the least
L
-logic containing the following three groups of ax-
ioms:
• Axioms of classical propositional logic in the lan-
guage ∨,∧, →,⊥.
• Strong negation axioms:
∼ (p ∧ q) ↔ (∼ p∨ ∼ q)
¬(p → q) ↔ (p∧ ∼ q)
∼ (p ∨ q) ↔ (∼ p∧ ∼ q)
∼∼ p ↔ p, and ∼ ⊥
• Modal axioms:
(p → q) → (p → q) ¬ ∼ p ↔ ¬ ∼ p
The truth-tables are shown in Table 3,4,5.
Table 3: Truth-table of “∼”.
ϕ ∼ ϕ
T F
F T
B B
N N
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
56

Table 4: Truth-table of “∧”.
∧ T F B N
T T F B N
F F F F F
B B F B F
N N F F N
Table 5: Truth-table of “∨”.
∨ T F B N
T T T T T
F T F B N
B T B B T
N T N T N
We can represent the elements of T,F,B, N as
pairs (a,b), where a,b ∈ {0,1}, then T,F, B, N can be
written as follows: (Odintsov and Wansing (2010))
T = (1, 0),F = (0, 1), N = (0, 0),B = (1, 1).
Under the presentation above, we can get the form
of twist-operators following:
(a,b) ∨ (c,d) = (a ∨ c, b ∧ d)
(a,b) ∧ (c,d) = (a ∧ c, b ∨ d)
∼ (a,b) = (b, a),(a,b) → (c, d) = (a → c, a ∧ d)
3.2 Semantics
A BK-model is a tuple M = (W,R,V ) where W is a
non-empty set of worlds, R ⊂ W ×W is an accessibil-
ity relation on W , and V : Prop ×W → T, F, B,N} is
a valuation function. It will be convenient to have an-
other definition closed to the standard Kripke model,
so we assign functions v
+
,v
−
: Prop → 2
W
defined as
follows instead of V : (Odintsov and Wansing (2017))
v
+
(p) = {w|V (p,w) ∈ {T,B}}
v
−
(p) = {w|V (p,w) ∈ {F,B}}
For a BK-model M = (W,R, v
+
,v
−
), we define
|=
+
and |=
−
between the worlds of M and formulas
as follows: (Odintsov and Wansing (2017), Odintsov
and Wansing (2010))
M,w |=
+
p ⇔ w ∈ v
+
(p)
M,w |=
−
p ⇔ w ∈ v
−
(p)
M,w |=
+
ϕ ∧ ψ ⇔ M,w |=
+
ϕ and
M,w |=
+
ψ
M,w |=
−
ϕ ∧ ψ ⇔ M,w |=
−
ϕ or
M,w |=
−
ψ
M,w |=
+
ϕ ∨ ψ ⇔ M,w |=
+
ϕ or
M,w |=
+
ψ
M,w |=
−
ϕ ∨ ψ ⇔ M,w |=
−
ϕ and
M,w |=
−
ψ
M,w |=
+
ϕ → ψ ⇔ M, w |=
+
ϕ ⇒
M,w |=
+
ψ
M,w |=
−
ϕ → ψ ⇔ M, w |=
+
ϕ and
M,w |=
−
ψ
M,w 6|=
+
⊥ always
M,w |=
−
⊥ always
M,w |=
+
∼ ϕ ⇔ M,w |=
−
ϕ
M,w |=
−
∼ ϕ ⇔ M,w |=
+
ϕ
M,w |=
+
ϕ ⇔ ∀u ∈ W ((w,u) ∈ R ⇒
M,u |=
+
ϕ)
M,w |=
−
ϕ ⇔ ∃u ∈ W ((w,u) ∈ R and
M,u |=
−
ϕ)
M,w |=
+
♦ϕ ⇔ ∃u ∈ W ((w,u) ∈ R and
M,u |=
+
ϕ)
M,w |=
−
♦ϕ ⇔ ∀u ∈ W ((w,u) ∈ R ⇒
M,u |=
−
ϕ)
If we use a pair (a,b) to express the value of for-
mula “ϕ” in world w according to the previous sub-
chapter, the basis definition of |=
+
and |=
−
can also
be written as follows:
M,w |=
+
ϕ ⇔ a = 1
M,w |=
−
ϕ ⇔ b = 1
4 4-VALUED LOGIC FOR
MULTI-AGENT
COMMUNICATION
Consider two people Ann and Bill, who are chatting
on the Internet. Ann learned a new dance and she
believes that her dance is very good, so she wants to
tell Bill it. Then she sends a video of her dance to
Bill. However, Bill doesn’t get the message that Ann’s
dance is good. The possible reasons are as follows:
• The Internet is not connected.
• Bill’s computer is too old to watch the video.
so he cannot get the message to revise his belief. Also,
it can be explained in other ways. For another exam-
ple, let agents a and b be two companies. p means
that “a is faced with bankruptcy”. Obviously, if a and
b are opponents, they won’t tell it to each other if they
believe p or the negation of p. Such p can be seen as
a private proposition.
Hatano et al. (2015) can express the disconnection
by channels, but it cannot show the other situation.
Here, we use a pair (a,b) to express the value of a
proposition ϕ. (a ∈ {T,F},b ∈ {0, 1})
• ϕ : (T,1) means “ϕ is true and public.”
• ϕ : (T,0) means “ϕ is true and private.”
• ϕ : (F, 1) means “ϕ is false and public.”
• ϕ : (F, 0) means “ϕ is false and private.”
4-valued Logic for Agent Communication with Private/Public Information Passing
57

If ϕ is public, other agents can get this message, and if
ϕ is private, others cannot revise their beliefs by this
message.
4.1 Syntax
In this paper, we define a new kind of 4-valued logic
different from BK-model.
Let PROP = { p,q,. ..} be a finite set of propo-
sitional variables and G = { a, b,... } a finite set of
agents. The language is generated by the following
Backus-Naur form:
α ::= p | ¬α | α ∧ α | c
ab
ϕ ::= α | B
a
α |
pub
α | [α↓
a
b
]ϕ | ¬ϕ | ϕ ∧ ϕ
where p ∈ PROP,a ∈ G, b ∈ G and α is an objective
(non-modal) formula.
Here, c
ab
means “There is a channel from agent
a to agent b”.
pub
α means “α is public”. And B
a
α
means “agent a believes α.”
The truth-table of ¬ is as follows:
Table 6: Truth-table of ¬.
ϕ ¬ϕ
(T,1) (F,1)
(T,0) (F,0)
(F, 1) (T, 1)
(F, 0) (T, 0)
The truth-table of ¬ is as follows. Here, we let
pub
ϕ be always public.
Table 7: Truth-table of
pub
.
ϕ
pub
ϕ
(T,1) (T,1)
(T,0) (F,1)
(F, 1) (T, 1)
(F, 0) (F,1)
For the 4-valued logic, we define ∧. Let ϕ and ψ
be two proposition. Then the proposition ϕ∧ψ is true
if and only if ϕ is true and ψ is true. And ϕ ∧ ψ is
public if and only if ϕ is public and ψ is public. Table
8 shows the truth-table of ∧.
Table 8: Truth-table of ∧.
∧ (T,1) (T,0) (F,1) (F, 0)
(T,1) (T,1) (T, 0) (F,1) (F, 0)
(T,0) (T,0) (T, 0) (F,0) (F, 0)
(F, 1) (F,1) (F,0) (F, 1) (F,0)
(F, 0) (F,0) (F,0) (F, 0) (F,0)
We define the function ∨ as follows:
ϕ ∨ ψ := ¬(¬ϕ ∧ ¬ψ)
Table 9: Truth-table of ∨.
∨ (T,1) (T,0) (F,1) (F,0)
(T,1) (T,1) (T, 0) (T, 1) (T, 0)
(T,0) (T,0) (T, 0) (T, 0) (T, 0)
(F, 1) (T, 1) (T, 0) (F,1) (F,0)
(F, 0) (T, 0) (T, 0) (F,0) (F,0)
The truth-table of ∨ is shown in Table 9.
Here, we should take notice of the truth-table of ∨.
In this paper, we define that if ϕ ∨ ψ is public if and
only if ϕ is public and ψ is public. In other words, if
ϕ is private, ϕ ∧ψ and ϕ ∨ψ are all private even if ψ is
public. It is because that if we cannot tell ϕ to others,
anything related to ϕ like ϕ ∧ ψ or ϕ ∨ ψ also cannot
be told to others.
Finally, we define the “→” as follows:
ϕ → ψ := ¬ϕ ∨ ψ
The truth-table of → is shown in Table 10.
Table 10: Truth-table of →.
→ (T,1) (T,0) (F,1) (F,0)
(T,1) (T,1) (T, 0) (F,1) (F,0)
(T,0) (T,0) (T, 0) (F,0) (F,0)
(F, 1) (T, 1) (T, 0) (T, 1) (T,0)
(F, 0) (T, 0) (T, 0) (T, 0) (T, 0)
Notice that ϕ → ψ is public only if ϕ is public and
ψ is public, which is similar to the operator ∨.
4.2 Semantics
Here, we use Kripke semantics with our syntax. A
Kripke model M is a tuple:
M = (W,R
G
,C
G
,V )
where W is a non-empty set of worlds, G is a non-
empty set of agents, R
G
= {R
a
| a ∈ G} and R
a
⊂
W × W is an accessibility of agent a on W , C
G
=
{C
ab
| a ∈ G,b ∈ G} and C
ab
⊆ W is a channel rela-
tion, and V : Prop×W → {(T,1),(T,0),(F, 1),(F,0)}
is the valuation function. In many cases it is conve-
nient to replace the four-valued V by two function,
so we assign functions v
t
,v
p
: Prop → 2
W
defined as
follows to express V :
v
t
(p) = {w|V (p,w) ∈ {(T,1),(T,0)}}
v
p
(p) = {w|V (p,w) ∈ {(T,1),(F, 1)}}
Given any model M, any world w ∈ W , any agent
a,b ∈ G, and any formula ϕ, we define the satisfaction
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
58
relation M,w |=
t
ϕ and M,w |=
p
ϕ as follows:
M,w |=
t
p iff w ∈ v
t
(p)
M,w |=
t
ϕ ∧ ψ iff M,w |=
t
ϕ and M, w |=
t
ψ
M,w |=
t
ϕ ∨ ψ iff M,w |=
t
ϕ or M, w |=
t
ψ
M,w |=
t
ϕ → ψ iff M,w 6|=
t
ϕ or M, w |=
t
ψ
M,w |=
t
¬ϕ iff M,w 6|=
t
ϕ
M,w |=
t pub
ϕ iff M,w |=
p
ϕ
M,w |=
t
B
a
ϕ iff ∀u ∈ W ((w,u) ∈ R
a
→
M,u |=
t
ϕ)
M,w |=
t
c
ab
iff w ∈ C
ab
M,w |=
p
p iff w ∈ v
p
(p)
M,w |=
p
ϕ ∧ ψ iff M,w |=
p
ϕ and M, w |=
p
ψ
M,w |=
p
ϕ ∨ ψ iff M,w |=
p
ϕ and M, w |=
p
ψ
M,w |=
p
ϕ → ψ iff M,w |=
p
ϕ and M, w |=
p
ψ
M,w |=
p
¬ϕ iff M,w |=
p
ϕ
M,w |=
p pub
ϕ always
M,w |=
p
B
a
ϕ iff M,w |=
p
ϕ
M,w |=
p
c
ab
always
Here, M, w |=
p
B
a
ϕ iff M,w |=
p
ϕ means that if
ϕ is public, the message that agent a believes ϕ is also
public and vice versa.
Also, let the value of ϕ in world w be (a,b), we
can define |=
t
and |=
p
in the other way as follows:
M,w |=
t
ϕ iff a := T
M,w |=
p
ϕ iff b := 1
Semantically speaking, in a model M, M,w |=
t
ϕ
means ϕ is true in world w, and M,w |=
p
ϕ means ϕ
is public in world w.
4.3 Multi-agent Communication
In this paper, we use the same dynamic operator [ϕ↓
a
b
]
as Hatano et al. (2015), which means “after agent a
sends a message ϕ to agent b via a channel”, and
[ϕ↓
a
b
]ψ means “after agent a sends a message ϕ to
agent b via a channel, ψ holds”. Here, the commu-
nication [ϕ↓
a
b
] will success only if the following hold:
• There is a channel from agent a to agent b.
• Agent a believes the content of the message ϕ.
• The message ϕ is public.
In Hatano et al. (2015), all of the message is
regarded as public message, which can be told to
others. Here, we use 4-valued logic which can
express whether a formula is public or not, so even if
agent a believe ϕ and there is a channel from a to b,
the communication will fail if ϕ is private, which is
different from Hatano et al. (2015).
The semantics of [ϕ↓
a
b
]ψ on a Kripke model M =
(W,R
G
,C
G
,v
+
,v
−
) is given as follows:
M,w |=
t
[ϕ↓
a
b
]ψ iff M
ϕ↓
a
b
,w |=
t
ψ
M,w |=
p
[ϕ↓
a
b
]ψ iff M
ϕ↓
a
b
,w |=
p
ψ
where M
ϕ↓
a
b
= (W,R
0
G
,C
G
,v
t
,v
p
) and R
0
i
∈ R
0
G
is de-
fined as:
• If i = b, for all x ∈ W ,
R
0
b
(x) :=
R
b
(x) ∩ JϕK
M
if M,x |=
t
c
ab
∧ B
a
ϕ
and M, x |=
p
ϕ
R
b
(x) otherwise.
• Otherwise, R
0
i
:= R
i
.
The truth set JϕK
M
is defined by:
JϕK
M
= {w ∈ W | M,w |=
t
ϕ}.
Semantically speaking, after [ϕ↓
a
b
], agent b will re-
vise his/ her belief if there is a channel from agent a to
b, agent a believes the content of the message ϕ, and
ϕ is public. Otherwise, agent b will not revise his/
her belief. Other agents than b will not change beliefs
because they get no message.
Example : Here, we give an example to show the
belief change after a semi-announcement. Consider a
Kripke model M = (W,R
G
,C
G
,v
t
,v
p
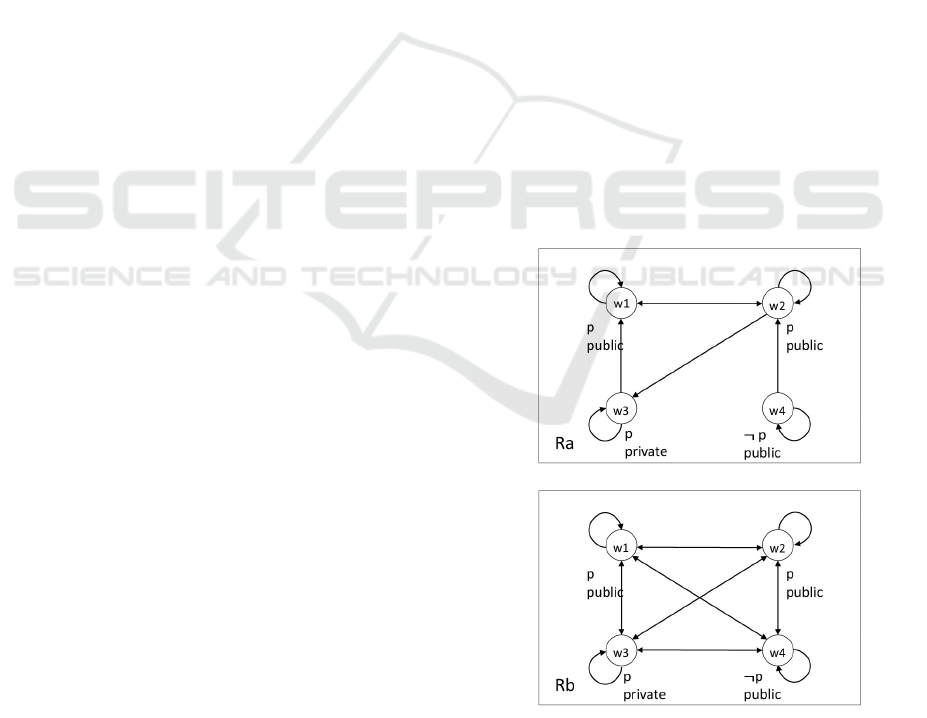
). (see Figure 2)
Figure 2: Accessibility relations of agents a and b.
Let G = {a,b}, W = {w
1
,w
2
,w
3
,w
4
}, R
a
=
{(w
1
,w
1
),(w
1
,w
2
),(w
2
,w
1
),(w
2
,w
2
),(w
2
,w
3
),
(w
3
,w
1
),(w
3
,w
3
),(w
4
,w
2
),(w
4
,w
4
)}, R
b
= W × W ,
4-valued Logic for Agent Communication with Private/Public Information Passing
59

C
ab
= {w
1
,w
3
,w
4
}, C
ba
=
/
0, C
aa
= C
bb
= W , v
t
(p) =
{w
1
,w
2
,w
3
} and v
p
(p) = {w
1
,w
2
,w
4
}.
As the configuration above, p is true in w
1
,w
2
,w
3
and is false in w
4
. p is public in w
1
,w
2
,w
4
and is pri-
vate in w
3
. According to the definition of B
a
ϕ, we
can see that agent a believe p in world w
1
,w
2
and
w
3
, while not believing anything in world w
4
. Agent
b doesn’t believe anything in any world. There are
channels from agent a to b in w
1
,w
2
,w
4
, while no
channel exists in w
3
.
Now, consider the model M
ϕ↓
a
b
which shows the
new accessibility relation after the action agent a
sends the message ϕ to agent b.
• In world w
1
, agent a believes p so a can send the
message, there is a channel from agent a to b so
the message can be sent to b, and as p is public so
b can understand the message p. As the result, b
will revise his/ her belief to believe p.
• In world w
2
, agent a believes p so a can send the
message, and as p is public so b can understand
the message p. However, there isn’t a channel
from agent a to b so the message cannot be sent to
b. So as the result, b won’t revise his/ her belief.
• In world w
3
, agent a believes p so a can send the
message, and there is a channel from agent a to b
so the message can be sent to b. However, as p is
private so b cannot understand the message p. As
the result, b won’t revise his/ her belief.
• In world w
4
, there is a channel from agent a to b so
the message can be sent to b, and as p is public so
b can understand the message p. However, agent
a doesn’t believe p so a cannot send the message.
As the result, b won’t revise his/ her belief.
We can see that after the action [ϕ↓
a
b
] which means
that agent a tells b the message p, agent b becomes
to believe p only in world w
1
. In other worlds,
agent b doesn’t change his/ her belief. So in the
new model M
ϕ↓
a
b
= (W,R
0
G
,C
G
,v
t
,v
p
), R
0
b
:= W ×
W /{(w
1
,w
3
),(w
1
,w
4
)} shown in Figure 3.
Figure 3: Accessibility relation of agent b after the an-
nouncement.
4.4 Hilbert-style Axiomatization
Here, we say ϕ is t-valid on M if M,w |=
t
ϕ for any
w ∈ W , and ϕ is t-valid in a class of Kripke models if ϕ
is valid on any M in the class. If we disregard whether
a formula is public or private, the definition of t-valid
is just the same as the definition of valid in chapter
2. So it is clear that in Table 11, all of the axioms
are t-valid and all of the rules preserve validity on M.
However, the concept p-valid defined in the same way
has no meaning, for there isn’t a tautology about the
concept of public and private.
Table 11: Hilbert-style Axiomatization K
c
of 4-valued
logic.
(Taut) `
t
ϕ, ϕ is a tautology.
(K
B
) `
t
B
a
(ϕ → ψ) → (B
a
ϕ → B
a
ψ)
(Selfchn) `
t
c
aa
(MP) From `
t
ϕ and `
t
ϕ → ψ, infer `
t
ψ
Nec
B
From `
t
ϕ, infer `
t
B
a
ϕ
Here, a ∈ G.
In our 4-valued logic, the following equivalence
relations hold.
Table 12: Hilbert-style Axiomatization K
c
[ ·↓
a
b
] of 4-valued
logic.
In addition to all the axioms and rules of K
c
, we add:
[α↓
a
b
]p ↔ p
[α↓
a
b
]c
cd
↔ c
cd
[α↓
a
b
]¬ϕ ↔ ¬[α↓
a
b
]ϕ
[α↓
a
b
]
pub
ϕ ↔
pub
ϕ
[α↓
a
b
]ϕ ∧ ψ ↔ [α↓
a
b
]ϕ ∧ [α↓
a
b
]ψ
[α↓
a
b
]B
c
ϕ ↔ B
c
ϕ(c 6= b)
[α↓
a
b
]B
b
ϕ ↔ ((c
ab
∧ B
a
α ∧
pub
α) → B
b
(α → ϕ))
∧(¬(c
ab
∧ B
a
α ∧
pub
α) → B
b
ϕ)
(Nec
[α↓
a
b
]
) From `
t
ϕ, infer `
t
[α↓
a
b
]ϕ
Prove: It is clear that equivalence relation of the first
value of the pairwise truth hold except [ϕ↓
a
b
]B
b
ψ, ac-
cording to the prove in Hatano et al. (2015). The sec-
ond value of the pairwise truth shows whether a for-
mula is public or private, so the equivalence relations
also hold with the second value of the pairwise truth.
Therefore, it is easy to see that the value of left and
right are the same except the line [ϕ↓
a
b
]B
b
ψ.
Then, consider [ϕ↓
a
b
]B
b
ψ, which means “after the
announcement ϕ from agent a, agent b believes ψ”.
According to the definition, the communication suc-
cesses for three conditions. First, c
ab
is true, which
means that there is a channel from a to b. Second, B
a
ϕ
is true, which means that agent a believes ϕ. Third,
ϕ is public, which is the same as
pub
ϕ is true. So if
the formula (c
ab
∧ B
a
ϕ ∧
pub
ϕ) is true, the commu-
nication will succeed, and if the formula is false, the
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
60

communication will fail. Therefore, the relation about
[ϕ↓
a
b
]B
b
ψ is also an equivalence relation.
In our 4-valued logic, if we just look at the first
value of the pairwise truth, which shows whether a
formula is true or false, and ignore the operator “
pub
”
in the syntax, furthermore if we change “|=
t
” into
“|=” and disregard the “|=
p
” in the semantic, this
logic will be the same with the logic in Hatano et al.
(2015), which has been proved to be complete and
sound, So if we disregard whether a formula is public
or private, the logic in this paper is also complete and
sound.
5 CONCLUSION
We have shown a 4-valued logic which distinguishes
the ordinary truth value of each proposition as well
as the information is private or public. By private
information transmission, since the recipient cannot
read the contents he/ she does not change his/ her be-
lief. This unsuccessful message passing corresponds
to such practical situations that the information needs
other background knowledge, password, deciphering
protocol, and so on.
We have reconstructed the dynamic epistemic
logic including the 4-valued logic, and have intro-
duced the two kinds of negations, the truth tables
for the logical connectives, their semantics, and its
Hilbert-style axiomatization. Since the recursion ax-
ioms can reduce the formulae with dynamic operators
to those without them, we can ensure the complete-
ness and soundness if we disregard the second value
of the pairwise truth.
In the current stage, our formalization may still
have redundancy; in the case we need a password for
the private information, the password itself would be
formalized in the very similar way to the channel vari-
ables. However, our objective is to formalize the un-
successful communication in general. Thus, we will
further develop the distinction between miscommuni-
cation by lack of necessary information and that by
unsuccessful message transmission in future.
ACKNOWLEDGEMENTS
This work is supported by JSPS kaken 17H02258.
REFERENCES
Barwise, J. and Seligman, J. (1997). Information flow: the
logic of distributed systems, volume 44. Cambridge
University Press.
Blackburn, P., De Rijke, M., and Venema, Y. (2002). Modal
logic: graph. Darst, volume 53. Cambridge Univer-
sity Press.
Cattaneo, G. and Nistic
`
o, G. (1989). Brouwer-zadeh posets
and three-valued łukasiewicz posets. Fuzzy sets and
Systems, 33(2):165–190.
Ciucci, D. and Dubois, D. (2013). A map of dependen-
cies among three-valued logics. Information Sciences,
250:162–177.
Giles, R. (1976). Łukasiewicz logic and fuzzy set the-
ory. International Journal of Man-Machine Studies,
8(3):313–327.
Hatano, R., Sano, K., and Tojo, S. (2015). Linear algebraic
semantics for multi-agent communication. In Pro-
ceedings of the International Conference on Agents
and Artificial Intelligence-Volume 1, pages 174–181.
SCITEPRESS-Science and Technology Publications,
Lda.
Malinowski, G. (2014). Kleene logic and inference. Bul-
letin of the Section of Logic, 43(1/2):43–52.
Odintsov, S. P. and Wansing, H. (2010). Modal logics
with belnapian truth values. Journal of Applied Non-
Classical Logics, 20(3):279–301.
Odintsov, S. P. and Wansing, H. (2017). Disentangling
fde-based paraconsistent modal logics. Studia Logica,
105(6):1221–1254.
Sano, K. and Tojo, S. (2013). Dynamic epistemic logic for
channel-based agent communication. In Indian Con-
ference on Logic and Its Applications, pages 109–120.
Springer.
Seligman, J., Liu, F., and Girard, P. (2011). Logic in the
community. In Indian Conference on Logic and Its
Applications, pages 178–188. Springer.
van Ditmarsch, H., van der Hoek, W., and Kooi, B. (2008).
Dynamic Epistemic Logic. Springer.
4-valued Logic for Agent Communication with Private/Public Information Passing
61
