
Hierarchical Reinforcement Learning Introducing Genetic Algorithm for
POMDPs Environments
Kohei Suzuki
1
and Shohei Kato
1, 2
1
Dept. of Computer Science and Engineering Nagoya Institute of Technology,
Gokiso-cho, Showa-ku, Nagoya 466-8555, Japan
2
Frontier Research Institute for Information Science, Nagoya Institute of Technology,
Gokiso-cho, Showa-ku, Nagoya 466-8555, Japan
Keywords:
Reinforcement Learning, Genetic Algorithm, Perceptual Aliasing.
Abstract:
Perceptual aliasing is one of the major problems in applying reinforcement learning to the real world. Percep-
tual aliasing occurs in the POMDPs environment, where agents cannot observe states correctly, which makes
reinforcement learning unsuccessful. HQ-learning is cited as a solution to perceptual aliasing. HQ-learning
solves perceptual aliasing by using subgoals and subagent. H owever, subagents learn independently and have
to r el earn each time when subgoals change. In addition, the number of subgoals is fixed, and the number of
episodes in reinforcement learning increases unless the number of subgoals is appropriate. In this paper, we
propose the reinforcement learning method that generates subgoals using genetic algorithm. We also report
the effectiveness of our method by some experiments with partiall y observable mazes.
1 INTRODUCTION
There is a major problem in practical application of
reinfor c ement learning in the robotics field. Many
studies of reinforc ement learning use Markov deci-
sion processes (MDPs), where agents observe sta-
tes correctly. However, it is not always possible for
agents to observe states accurately in real environ-
ments. For example, in case of autonomous mobile
robots, perceptual aliasing (Whitehea d and Ballard,
1991) arises from various factors such as sensor fai-
lure. Perceptual aliasing means that different states
are rec ognized as the same state. Because of this,
agents cannot learn the rou te correctly. This environ-
ment is called the partially observable Markov deci-
sion processes (POMDPs) (Whitehead and Ballard,
1990). A learning metho d under the POMDPs en-
vironm ent is necessary for practical use of reinforce-
ment learn ing in the real world.
There are many types of solutions to per cep-
tual aliasing: the methods u sin g sub goals (Wiering
and Schmidhuber, 1997; Nomura and Kato, 2015)
(Suzuki and Kato, 2017), the methods using profit
sharing (PS) (Miyazaki and Kobayashi, 2003; Arai
and Sycara , 2001; Uemu ra et al., 2005) , the methods
using recurren t neural networks (Mnih et al., 2016;
Sridharan et a l., 2010; Sallab et al., 2017), the met-
hods using bayesian (Ross et al., 2008; Poupart et al.,
2006; Thomson and Young, 2010) a nd the methods
using state transition history (Chrisman, 199 2; Mc-
Callum, 1 993; McCallum, 1995). In this paper, we
focus on the methods usin g subgoals b ecause these
methods are able to adapt to c omplex tasks. HQ-
learning (Wiering and Schmidh uber, 1997) and First
Visit Profit Sharing (FVPS) (Ara i and Sycara, 2001)
are cited as solutions to perceptual aliasing. HQ-
learning solves perceptual aliasing by using subgoals
and subagents. Th e subgoals are determined by HQ-
values, which are values of subg oals. However, sub-
agents learn independently and have to relearn each
time when subgoals change. In addition, the number
of subgoals is fixed, and the number of episodes in-
creases unless the numbe r of subgoals is appropriate.
Therefore, learning efficiency is poor. FVPS is a m et-
hod that improves Profit Sharing (PS), and updates
state-action pairs of each rule only once per one epi-
sode. However, it is difficult for FVPS to set the ini-
tial value of the state-action pair s which is suitable for
the environment, moreover, FVPS accumulates value.
Therefore, there is a high possibility of falling into
local solution s.
In th is paper, we propose the reinforcement le-
arning method that generates subgoals using gen e-
tic algo rithm (GA). We explain perceptual aliasing in
Section 2, propose Subgoal Evolution-based Reinfor-
cement Learning (SERL) in Section 3, and conduct
experiments under POMDPs environm ent in Section
4. We propose Hy brid learning using PS and GA
318
Suzuki, K. and Kato, S.
Hierarchical Reinforcement Learning Introducing Genetic Algorithm for POMDPs Environments.
DOI: 10.5220/0007405403180327
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 318-327
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Figure 1: A POMDP environment.
(HPG) that improves SE RL and report the effective-
ness of our method by some exp eriments with parti-
ally observable mazes in Section 5 and Section 6.
2 PERCEPTUAL ALIASING
In this paper, we consider the grid world as shown in
Figure 1. The ag ent can per ceive only eight neighbor
cells and performs self-localization by those cells.
There are four types of action: “up” “ down” “left”
and “right”. In Figure 1, the agent must go through
the states “A” and “B” to reach the goal state “G”
from the start state “S”. However, the agent is u na-
ble to distinguish between state “A” and “B” because
these states have the sam e eight neighbor cells. This
problem is called perceptual a liasing. This makes the
agent select “up” in state “A” becau se it selects “up”
in state “B” which is close to the goal. Therefore, the
agent falls into a loop in state “A”. In this paper, we
solve this problem.
3 SUBGOAL EVOLUTION-BASED
REINFORCEMENT LEARNIN G
(SERL)
SERL algorithm g e nerates agents that solve percep-
tual aliasing using GA. Each agent has subage nts and
subgoals represen ted in the binary string. Subgoals
divide a POMDPs environment into MDPs environ-
ments. Subagen ts perform reinforcement learning un-
der the MDPs environments. In acco rdance with the
result of the reinforcement learning, genetic operation
is perf ormed, and subgoals are generated. The over-
view of the proposed method is shown in Figure 2.
The procedure of SERL is shown below.
1. Initial population generation
Generate Y ag ents. Each agent has (X + 1) suba-
gents, which have a subgoal and Q-table. Subgo-
als are generated randomly.
2. Reinfo rcement learning
Subagents performs reinforcement learning using
Q-learning(Watkins and Dayan, 1992) in each
agent. Reinforc e ment learning is perfo rmed in or-
der of subagents. The order shifts to the next sub-
agent when the subagent has reach the subgoal.
3. Genetic operation
Subgoals are inherited by crossover and are gene-
rated by mutation.
4. Repeat the procedure 2 and 3 for the number of G
generations.
3.1 Initial Population Generation
Agents th a t have subagents and subgoals are ge -
nerated in initial population generation. Subgoals
are represented in th e binary string as shown in Fi-
gure 3, where “1” and “0” means a wall a nd a
road respe ctively, because the observation range of
the agent is eight neighbo r cells in th is paper. In
SERL, each agent randomly generates sub goals be-
cause the agents do not know what kinds of state exist
in unknown environment.
3.2 Reinforcement Learning
In reinforcement learning, subagents perform rein-
forcement le arning using Q -learning. SERL sets the
maximum number of steps in an episode an d finis-
hes reinforcement learning if the number of steps in
an episode reaches the maximum number. This is b e -
cause there is a possibility that the subagent does not
reach the subgoal which agents generated ran domly.
3.3 Genetic Operation
3.3.1 Fitness Calculation
After reinforcement lea rning, agents perform one epi-
sode using greedy selection in order to remove the
randomness of action selection. Fitness is calcula-
ted using the result of this one episode. The fitness
function is shown below.
F1 =
Re +
Max
step − step
sub × a
(reach the goal)
goal
b
(not reach the goal)
, (1)
where, Re is the goal reward value; Max
step is
the maximum step number, step is the numb e r of
Hierarchical Reinforcement Learning Introducing Genetic Algorithm for POMDPs Environments
319

Figure 2: Overview of the proposed method.
Figure 3: Subgoal expression of state X.
steps taken to ob ta in rewards, sub is the numbe r of
subagents, goal is num ber of tim es th e agent reached
the goal during reinforcement learning, and a and b
are hyperparameter. The b is set to a value that
goal
b
does not exceed the go al reward Re. The goal is used
for fitness calculation when the agent does not reach
the goal in one episode using the gree dy selection.
This is because, the agent is likely to have effective
subgoals if the agent reaches the goal during reinfor-
cement learning.
3.3.2 Crossover
SERL performs the fo llowing two kinds o f crossover.
Crossover 1 performs uniform crossover of subgo-
als as shown in Figure 4(a). Subgoals are inherited
and the state-action pairs are initialized. This is ex-
pected to avoid local solutions.
Crossover 2 performs single-point crossover of
subagents as shown in Figure 4(b). Subgoals and
the state-action pairs a re inherited. Lea rning effi-
ciency incr e ases by inheriting the state-action pairs.
In addition, the crossover points of two parents are
not common points, but are random points in each
agent, which makes the number of subgoals d ynami-
cally changes an d is suitable for the environment.
In general, crossover generates two offspring fr om
two parents. However, SERL just selects one of two
offspring.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
320

(a) Crossover 1
(b) Crossover 2
Figure 4: Crossover.
Figure 5: Maze of Yamamura(Yamamura et al., 1995).
3.3.3 Mutation
There is a possibility that effective subgo als are not
generated in initial population generation. In this
case, mutation is important so as to avoid local solu-
tions. In muta tion, SERL inverts a part of the binary
string r andomly, which expresses the subgoal. In ad-
dition, SERL changes a p art of the binary string to
“don’t care”. “Don’t care” means either “0” or “1”,
that is, agent does not care whether correspon ding cell
is road or wall. This makes subgoals more diverse.
4 COMPARETIV E
EXPERIMENTS UNDER THE
POMDPS
We performed comparative experiments using maze
of Yamamura (Yamamura et al. , 1995) shown in Fi-
gure 5. Three methods are used: SERL, HQ-learning,
and FVPS. As explaine d in Section 2 , the ob servation
range of age nts is 8 neighbor cells, and the actions are
Table 1: Parameters.
Number of generations 10
Number of agents 20
Number of reinforcement learning episodes 30
Elite preservation (%) 20
Crossover 1 (%) 12.5
Crossover 2 (%) 87.5
Mutation rate (%) 5
Figure 6: The result in maze of Yamamura.
of four types “up” , “down”, “left” and “r ight”. Per-
ceptual aliasing occurs in the states, “A”, “B”, “C”,
“D” and “E”. The parameters for SERL is shown in
Table 1. The number of episodes of each method is
6,000. The maximum number of steps in an episode is
150. T he number of in itial subgoals of SERL and the
number of subgoals of HQ-learning are 2. The expe -
riments were performed in 100 runs for each method,
then the average value of results was calculated.
The experimental results a re shown in Figure 6.
The vertical axis of the graph shows the minimum
number of steps to reach the goal, and the horizon-
tal axis shows the number of reinforcement learning
episodes. SERL learned slower than the other two
methods. This is because subgoals were generated
randomly at the initial population generation, which
did not make m a ny subgoals suitable for the maze. In
addition, SE RL did not converge to th e optimal so -
lution. SERL took time to find appropriate subgoals
because a new subgoal, which the initial individuals
do not h ave, is generated only by mutation. There-
fore, SERL shou ld generate effective subgoals at the
initial population generation.
Hierarchical Reinforcement Learning Introducing Genetic Algorithm for POMDPs Environments
321

5 HYBRID LEARNING PROFIT
SHARING AND GENETIC
ALGORITHM (HPG)
We pro pose HPG alg orithm that agents select subgo-
als among subgoal candidates at initial population ge-
neration. HPG judges aliased states as subgoal candi-
dates using PS. The flow of HPG is the same as SERL.
HPG improves initial population generation and rein-
forcement learning in SERL.
5.1 Initial Population Generation
The procedure of initial generation population is
shown below.
1. A n agent per forms reinforcement learning using
PS.
2. Subgoal candidates are determined based o n state-
action pairs in each state.
3. Subgoals of each agent are determined randomly
among the subgoal candidates.
HPG makes su bgoal candidates using PS, which is a
kind of reinforceme nt learning.
PS (Miyazaki et al., 1994)(Grefenstette, 1988) is
an offline learning method which collectively updates
state-action pairs after earning rewards, and actio ns
are often determined by roulette selection. The upda-
ting formula for state-action pairs P(s
t
, a
t
) o f action
a
t
in the state s
t
is shown below.
P(s
t
, a
t
) ← P(s
t
, a
t
) + f (x), (2)
where, f (x) is a reinforcement function and x is the
number of steps to earn rewards. The re inforceme nt
function often uses a geometric decreasing function.
However, HPG changes the way of updating state-
action pair s to judge aliased states.
HPG equally updates the state-action pairs of ru-
les selected in th e same state. Because of that, ea c h
rule is updated only once in one episode, an d the rein-
forcement function does not depend on the x. It is
expressed by the following formula.
f (R, W ) =
R
W
, (3)
where, R is a reward and W is length of the episode.
We propose two methods to genera te initial popula-
tion using this PS: HPG using a ction selection proba-
bility and H PG using entropy o f action selection.
5.1.1 HPG Using Action Selection Probability
(HPG-a)
HPG-a determines sub goal candidates using action
selection probabilities. PS updates the rules equally
in each state. The value of state-action pairs are the
same when there are multiple essential rules to earn
the reward in a certain state. The value of state- a ction
pairs are equal if all actions have to be selected to earn
the reward. Then, the action selection probabilities P r
are the value of th e following formula.
Pr =
1
|Action|
, (4)
There is a possibility that effective subgo als are not
generated in initial population ge neration. In this
case, mutation is important so as to avoid local solu-
tions. In mutation, SERL inverts a part of the binary
string randomly, which expresses the subgoal. In ad-
dition, SERL changes a p art of the binary string to
“don’t care”. “Don’t care” means eith er “0” or “1 ”,
that is, agent does not care whether corr esponding cell
is road or wall. This makes subgoals m ore diverse.
where, Action is set of selectable actions in a state.
The action selec tion probability of the necessary ru-
les for earning rewards never falls below the value of
(4) because the state- action pairs of the necessary ru-
les are definitely upd ated every time when the agent
earns a reward. In othe r words, the agent has to se-
lect different actions because there is a hig h possibi-
lity that perceptual aliasing occurs when the action
selection probabilities of mu ltiple rules are over the
value of (4) in one state. Therefore, the states where
action selection probabilities of multiple rules exceed
the value of (4) are set as subgoal candida te s.
5.1.2 HPG Using Entropy of Action Selection
(HPG-e)
HPG-e determines the subgoal can didates using en-
tropy o f action selection and calculates the entropy
En(s) of action selection in each state s by th e follo-
wing formula.
En(s) = −
∑
a∈Act(s)
P(a)log
2
P(a), (5)
where, Act is set of selectable actions, P(a) is the
action selection p robability of action a. The value
of (5) decreases when the action selection proba bility
of one action increases. In contr ast, the value of (5)
increases when the action selection probability of all
actions are equal. In other words, entropy of action
selection exp resses uncertainty of policy and in c rea-
ses und er POMDPs.
When the agent has to select two action (a
1
, a
2
)
on an aliased state s
∗
, these action selection pro babi-
lities app roach
1
2
and the others approach 0. Then, the
entropy of a c tion selection is the value of following
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
322

formu la.
En(s
∗
) = −
∑
a∈Act(s
∗
)
P(a)log
2
P(a)
= −
∑
a∈{a
1
,a
2
}
P(a)log
2
P(a)
= −(
1
2
log
2
1
2
+
1
2
log
2
1
2
)
= 1 (6)
The entropy of action selection do es not exceed (6)
when only one action selection probability in a state
is large. Whereas, the entropy exceeds (6) when the
agent has to select at least two actions to reach the
goal. It is highly likely to be aliased state when the
state h as the entropy exceeding (6). Therefore the
state is set as a subgoal candidate in HPG-e. Then,
each agen t randomly determines subgoals among the
subgoal cand idates.
5.2 Reinforcement Learning
In SERL, subagents perform reinforcement learn ing
using Q-learning (Watkins and Dayan, 1 992). Howe-
ver, In HPG, subagents perfo rm PS as described in
Section 5.1. Uemura et al. (Uemura et al. , 2005) sho-
wed tha t it is not inferior to random selection if the
agent can select all the n ecessary rules for rewards
with the sam e prob a bility in the state, where the agent
has to select multiple rules to reach the goal. HPG sa-
tisfies this c ondition and is able to solve perceptual
aliasing because HPG gives rewards equally to ru les
in the same state. Therefore, it is possible to reach the
goal even when subgoals do not divide the POMDPs
environment well.
HPG involves h ybrid learning usin g PS a nd GA.
By combining the PS and GA, HPG compensates for
their disadvantages: loca l optima and learning effi-
ciency.
5.3 Peformance of Judgement of
Aliased States
We compared the two methods (HPG-a and HPG-e)
using the maze shown in Figure 7 and consider their
respective performances of judgement of aliased sta-
tes. Experimental setup is the same as in Section 4.
Perceptual aliasing occ urs in red cells in each maze.
The maze in Figure 7(a) is an environment that the
different actions must be selected in each red cell. I n
state “2”, the agent has to select “le ft”. However, In
state “1”, it has to select an action except “left”. The
maze in Figure 7(b) is an environment where the age nt
is able to go the route which the agent avoids percep-
tual aliasing. The number of PS episodes is set to
(a) Maze 1
(b) Maze 2
Figure 7: Mazes.
Table 2: Result of Maze 1.
(a) The number of times red cells is determined
to be subgoal candidates ( the sum of 100 r uns)
❳
❳
❳
❳
❳
❳
❳
❳
❳
❳
Method
Reward
50 100 300
HPG-a 100 100 97
HPG-e 100 100 100
(b) The sum of subgoal candidates (the average of
100 runs)
❳
❳
❳
❳
❳
❳
❳
❳
❳
❳
Method
Reward
50 100 300
HPG-a 1.16 1.06 1.06
HPG-e 6.80 5.42 4.55
1000, and the parameters for PS are unified in both
methods. T he a ll initial values of the state-action pairs
are set to 10 and th e goal reward was set to any of 50 ,
100 and 300.
The results of Maze 1 are shown in Table 2. Ta-
ble 2(a) shows the number of times red cells are jud-
ged to be aliased state in 100 runs. HPG-a and HPG-e
were able to judge red cells as aliased state almost cor-
rectly. However, HPG-a failed to jud ge aliased state
when reward was 300. In state “2”, “left” is selected
and, in state “1”, any action o f thre e action s (“up”
“down” and “right”) is selected to reach the goal. The
selection probability of “left” in red cells increased,
whereas the selection probabilities of the other three
actions were dispersed and did not exceed (4). There-
fore, HPG-a could not judge aliased states correctly.
Table 2(b) shows the average o f the to tal number of
subgoal candidates in 100 runs. In HPG-a, the num-
ber of su bgoal candidates was close to 1 which is an
ideal value. However, the number of subgo al candi-
dates was large in HPG-e. This is because the diffe-
rence in state-action pairs was small while reinforce-
Hierarchical Reinforcement Learning Introducing Genetic Algorithm for POMDPs Environments
323

Table 3: Result of Maze 2.
(a) The number of times red cells is determined
to be subgoal candidates ( the sum of 100 r uns)
❳
❳
❳
❳
❳
❳
❳
❳
❳
❳
Method
Reward
50 100 300
HPG-a 65 72 76
HPG-e 100 100 100
(b) The sum of subgoal candidates (the average of
100 runs)
❳
❳
❳
❳
❳
❳
❳
❳
❳
❳
Method
Reward
50 100 300
HPG-a 1.31 1.19 1.18
HPG-e 8.67 6.77 5.31
ment learning was in progress, which made the en-
tropy of action selection probabilities large. As value
of reward increased, the reinforceme nt learning was
completed early and the number of subgoal candida-
tes was small.
The results of Maze 2 are shown in Table 3. HPG-
a had poor precision for judgement of aliased state
compare d to result of Maze 1. There are two rou-
tes to the goal in Maze 2. The state-action p airs of
”left” became high in the red cell if the agent did not
go to the route wh ich through the state ”1”. In that
case, there were no more rules that exceed (4). As the
reward increased, the difference in state-action pairs
between the two routes became larger and the pr e ci-
sion increased. Whereas, although HPG-e had many
subgoal cand idates, red cells could be acc urately jud-
ged as aliased states. This is because HPG- e judged
the state where action selections were dispersed by
using entropy. In such a state, there is a high possibi-
lity that there are multiple effective rules. Therefore,
HPG could correctly judge aliased states.
HPG-a is able to correctly determine the aliased
states as lon g as PS does not fall into a local solution
at initial population gen eration. Although HPG- e has
a loose determination criterion for a liased state and
increases the number of subgoal candidates, HPG-e
does not miss the aliased states. Therefore, HPG- a is
more suitable for simple mazes and HPG-e is more
suitable for calculating optimal solution.
5.4 Effectiveness of Initial Population
Generation of HPG under the
POMDPs
We report the effectiveness of HPG-a and HPG-e
using the maze used in Section 4. Experimental se-
tup is also the same as in Section 5 .3. The number of
episodes of PS a t initial population generation is 100,
the number of generation s is 10, the number of agents
Figure 8: The result in maze of Yamamura.
Figure 9: The maze of Wiering (Wiering and Schmidhuber,
1997).
is 20, the numbe r of reinforcem ent learning episodes
in each agent is 30, a nd the nu mber of initial subgoals
is 2.
The result is shown in Figur e 8. HPG-a and HPG-
e lear ned faster than FVPS and obtained good results.
FVPS took tim e to learn because initial value of state-
action pairs was sma ll. HQ-learning did not find ap-
propriate subg oals. This is because HQ-learning has
256 selectable subgoals, which is difficult to find ap-
propriate subgoals. Whereas, HPG-a and HPG-e ge-
nerated effective subgoa ls by PS at initial population
generation, and the subgoals made the maze easier.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
324
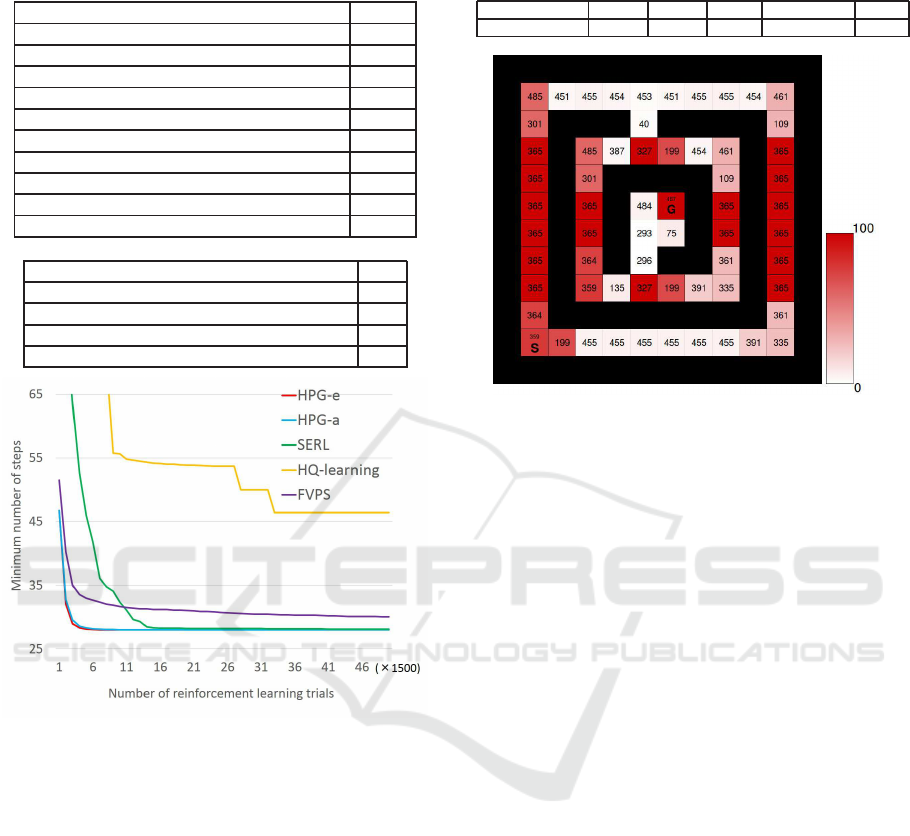
Table 4: Parameters.
(a) HPG-a and HPG-e
Number of PS episodes at initial population 15000
Number of generations 49
Number of agents 50
Number of reinforcement learning episodes 300
Elite preservation (%) 20
Crossover 1 (%) 12.5
Crossover 2 (%) 87.5
Mutation rate (%) 5
R (fitness calculation) 100
a (fitne ss c alculation) 0.2
b (fitness calculation) 3
(b) SERL
Number of generations 50
Number of agents 50
Number of reinforcement learning episodes 300
Elite preservation (%) 30
Mutation rate (%) 5
Figure 10: T he result in a POMDP environment.
6 PERFORMANCE
EXPERIMENTS FOR A
POMDPS ENVIRONMENT
We performed experiments under the POMDPs en-
vironm ent using the maze of Wiering(Wiering and
Schmidhuber, 1997) sh own in Figure 9. The num-
bers in the cells represent observation information.
These number is obtained by converting 9-digit bi-
nary number, which expresses subgoal as shown in
Figure 3, into decimal number. The agent has to solve
the perceptual aliasing to reach the goal in this envi-
ronment. Perceptu al aliasing occurs in the red cells
and the blue cells on the shortest path indicated by
the red arrow. We per formed comparative experi-
ments with five methods: HPG-a , HPG-e, SERL, HQ-
learning and FVPS. The par ameters for each method
are shown in Table 4. The number of trials of each
Table 5: Minimum number of steps to reach t he goal (the
average of 100 runs).
HPG-a HPG-e SERL HQ-learning FVPS
Minimum steps 28.00 28.00 28.10 46.04 30.06
Figure 11: The distribution of subgoal candidates (HPG-a).
method is unified to 750,000 episodes. The sh ortest
step in this maze is 28, the maximum number of steps
in an episode is 150, a nd the number of initial subgo-
als is 3. The experiment was performed in 100 runs
for each method and the average value of results was
calculated.
The experimental results are shown in Figure 10
and Table 5. HPG-a and HPG-e converged to the sho r-
test step number. HPG-e obtained the optim a l solu-
tion in the sixth generation and HPG-a did in the 14th
generation. HPG-e completed learning in less than a
half of the trials of HPG-a. Whe reas, FVPS fell into
a local solutio n and SERL could n ot find approp ri-
ate subgoals and did no t obtain an optimal solu tion.
HQ-learning had to relearn the p olicy each time when
the subgoal changed and failed to obtain the optimal
solution. It was confirmed that the effectiveness of
subgoal gene ration by PS, a nd HPG-e is more suita-
ble than HPG-a in c omplicated environments where
there are multiple routes to the go al.
Figure 11 and Figure 12 show th e distribution of
subgoal candidates during 100 r uns. The deeper the
red, the greater the number of times the state is jud-
ged to be a subgoal candidate. Both metho ds accura-
tely judged red an d blue cells as aliased states in most
of th e runs. However, in HPG-a, “301” and “485”
were judged as subgoa l ca ndidates as not many as in
HPG-e. The agent h as to solve perceptual aliasing
occurring in these states to reach the goal in the shor-
test step. Whereas, HPG-e regarded these states as
subgoal candidates in more than 90% of experim ents.
Because of this, HPG-e got the optimal solution ear-
lier than HPG-a .
Hierarchical Reinforcement Learning Introducing Genetic Algorithm for POMDPs Environments
325

Figure 12: The distribution of subgoal candidates (HPG-e).
7 RELATED WORKS
7.1 HQ-learning
HQ-learning (Wiering and Schmidhuber, 1997) is a
hierarchical exten sion of Q -learning and divides task
into subtasks using subgoals. The agent has some
subagents which have Q-table independently. The
subagents perform Q(λ)-learning (Peng and Williams,
1994; Wiering and Schmidhuber, 1998) in order from
first subagent and shift the next subagent when the
subagent reaches the subgoal. Action are selected ac-
cording to the Max-Bolzman n exp loration (Kaelbling
et al., 1996).
HQ-learning also learns appropriate sub goals.
The subgoals are determined by H Q -values which are
values of subgoals. HQ-value is updated when an
agent accomplish the task. The updating for mula for
HQ-value of subagent
i
is shown below.
R
i
=
t
i+1
−1
∑
t=t
i
γ
t−t
i
R(s
t
, a
t
),
HQ
′
i
( ˆo
i
) ← R
i
+ γ
t
i+1
−t
i
[(1 − λ)max
o
′
∈O
HQ
i+1
(o
′
)
+λHQ
′
i+1
( ˆo
i+1
],
HQ
i
( ˆo
i
) ← (1 − α)HQ
i
( ˆo
i
) + αHQ
′
i
( ˆo
i
), (7)
where, γ (0 ≤ γ ≤ 1) is the discount-rate, R is the re-
ward, HQ
i
(o) is HQ-value of state o, α is learning
rate, and λ (0 ≤ λ ≤ 1) is a constant. Subgoals are
selected using ε-greedy exploratio n (Sutton, 1996).
In HQ-learning, subagents have to relearn each
time when subgoals change. In addition, the number
of subgoals is fixed. Therefore, learning efficiency is
poor. In HPG, State-action pairs are inherited by cros-
sover and the crossover points are random po ints in
each agent. Because of this, HPG obtained solutions
more quickly than HQ-learning as shown in Figure 8
and Figure 1 0.
7.2 First Visit Profit Sharing
FVPS (Arai and Sycara, 2001) is an improved met-
hod of profit sharing. FVPS changes reinforce ment
function and up dates state- action pairs of each rule
equally. The reinforcement function f (x) is shown
below.
f
x
=
α
o
x
(First time to update rule λ)
0 (Otherwise),
(8)
where, α
o
x
must be a constant value in state o
x
.
In FVPS, it is d ifficult to set the initial value of
the state-action pairs, which is suitable for the envi-
ronment, moreover, FVPS accumulates the values of
state-action pairs. Therefore, FVPS often falls into
local solutions. In HPG, state-action p a irs ar e initi-
alized at crossover, which made HPG o btain o ptimal
solution as shown in Figure 10 and Table 5.
8 CONCLUSION
In this paper, we propo sed the reinforcement learnin g
method that generates subg oals using GA under the
POMDPs. SERL takes time to generate appropriate
subgoals. Therefore, we proposed HPG that genera-
tes subgoal candidates using PS. It was confirmed that
HPG-a using action selection probability is suitable
for simple mazes and HPG-e using entropy of action
selection is suitable for comp licated mazes by some
experiments. However, HPG has a problem which
is appropriate subgoals are not found if PS cann ot
achieve the ta sk at initial population generation. To
solve the problem, we consider introducing swarm in-
telligence (Beni and Wang, 1993) to HPG. HPG intro-
duces swarm reinforcement learning (Iima and Kuroe,
2008) and shares state-action pairs, and deals with
complex problems.
In the future, we will improve the performan ce of
judgment of aliased states. We w ill a lso condu c t ex-
periments in the real world using mobile ro bots.
REFERENCES
Arai, S. and Sycara, K. (2001). Credit assignment method
for learning effective stochastic policies in uncertain
domains. In Proceedings of the 3rd Annual Confe-
rence on Genetic and Evolutionary Computation, pa-
ges 815–822. Morgan Kaufmann Publishers Inc.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
326

Beni, G. and Wang, J. (1993). Swarm intelligence in cellular
robotic systems. In Robots and B iological Systems:
Towards a New Bionics?, pages 703–712. Springer.
Chrisman, L. (1992). Reinforcement learning with percep-
tual aliasing: The perceptual distinctions approach. In
AAAI, pages 183–188.
Grefenstette, J. J. (1988). Credit assignment in rule disco-
very systems based on genetic algorithms. Machine
Learning, 3(2-3):225–245.
Iima, H. and Kuroe, Y. (2008). Swarm reinforcement le-
arning algorithms based on sarsa method. In SICE
Annual Conference, 2008, pages 2045–2049. I EEE.
Kaelbling, L. P., Littman, M. L., and Moore, A. W. (1996).
Reinforcement l earning: A survey. Journal of artifi-
cial intelligence research, 4:237–285.
McCallum, R. A. (1993). Overcoming incomplete percep-
tion with utile distinction memory. In Proceedings of
the Tenth International Conference on Machine Lear-
ning, pages 190–196.
McCallum, R. A. (1995). Instance-based utile distinctions
for reinforcement learning with hidden state. In ICML,
pages 387–395.
Miyazaki, K. and Kobayashi, S. (2003). An extention of
profit sharing to partially observable markov decision
processes : Proposition of ps-r* and its evaluation.
Journal of Japanese Society for Artificial Intelligence,
18(5):286–296.
Miyazaki, K., Yamamura, M., and Kobayashi, S. (1994).
A theory of profit sharing i n reinforcement learning.
Journal of Japanese Society for Artificial Intelligence,
9(4):580–587. (in Japanese).
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap, T.,
Harley, T., Silver, D., and Kavukcuoglu, K. (2016).
Asynchronous methods for deep reinforcement lear-
ning. In International conference on machine lear-
ning, pages 1928–1937.
Nomura, T. and Kato, S. (2015). Dynamic subgoal genera-
tion using evolutionary computation for reinforcement
learning under pomdp. International Symposium on
Artificial Life and Robotics, 2015(22):322–327.
Peng, J. and Williams, R. J. (1994). Incremental multi-st ep
q-learning. In Machine Learning Proceedings 1994,
pages 226–232. Elsevier.
Poupart, P., Vlassis, N., Hoey, J., and Regan, K. (2006).
An analytic solution t o discrete bayesian reinforce-
ment learning. In Proceedings of the 23rd internatio-
nal conference on Machine learning, pages 697–704.
ACM.
Ross, S., Chaib-draa, B., and Pineau, J. (2008). Bayesian
reinforcement learning in continuous pomdps. In In-
ternational Conference on Robotics and Automation
(ICRA).
Sallab, A. E., Abdou, M., Perot, E., and Yogamani,
S. (2017). Deep reinforcement learning frame-
work for autonomous driving. Electronic Imaging,
2017(19):70–76.
Sridharan, M., Wyatt, J., and Dearden, R. (2010). Plan-
ning to see: A hierarchical approach to planning vi-
sual actions on a robot using pomdps. Artificial Intel-
ligence, 174(11):704–725.
Sutton, R. S. (1996). Generalization in reinforcement le-
arning: Successful examples using sparse coarse co-
ding. In Advances in neural information processing
systems, pages 1038–1044.
Suzuki, K. and Kato, S. ( 2017). Hybrid learning using profit
sharing and genetic algorithm for partially observable
markov decision processes. In International Confe-
rence on Network-Based Information Systems, pages
463–475. Springer.
Thomson, B. and Young, S. (2010). Bayesian update of dia-
logue state: A pomdp framework for spoken dialogue
systems. Computer Speech & Language, 24(4):562–
588.
Uemura, W., Ueno, A., and Tatsumi, S. (2005). An episode-
based profit sharing method for pomdps. IEICE Tran-
sactions on Fundamentals of Electronics, Communi-
cations and Computer Sciences, 88(6):761–774. (in
Japanese).
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8(3-4):279–292.
Whitehead, S. D. and Ballard, D. H. (1990). Active percep-
tion and reinforcement learning. Neural Computation,
2(4):409–419.
Whitehead, S. D. and Ballard, D. H. (1991). Learning to
perceive and act by trial and error. Machine Learning,
7(1):45–83.
Wiering, M. and Schmidhuber, J. (1997). Hq-learning.
Adaptive Behavior, 6(2):219–246.
Wiering, M. and Schmidhuber, J. (1998). Fast online q (λ).
Machine Learning, 33(1):105–115.
Yamamura, M., Miyazaki, K., and Kobayashi, S. (1995). A
survey on learning for agents. The Japanese Society
for Artificial I ntelligence, 10(5):683–689.
Hierarchical Reinforcement Learning Introducing Genetic Algorithm for POMDPs Environments
327
