
Towards Hierarchical Probabilistic CTL Model Checking:
Theoretical Foundations
Norihiro Kamide and Yuki Yano
Teikyo University, Faculty of Science and Engineering, Department of Information and Electronic Engineering, Toyosatodai
1-1, Utsunomiya-shi, Tochigi 320-8551, Japan
Keywords:
Computation Tree Logic, Probabilistic Computation Tree Logic, Hierarchical Computation Tree Logic,
Embedding Theorem, Relative Decidability.
Abstract:
This study proposes a hierarchical probabilistic computation tree logic, HpCTL, which is an extension of the
standard probabilistic computation tree logic pCTL, as a theoretical basis for hierarchical probabilistic CTL
model checking. Hierarchical probabilistic model checking is a new paradigm that can appropriately verify
hierarchical randomized (or stochastic) systems. Furthermore, a probability-measure-independent translation
from HpCTL into pCTL is defined, and a theorem for embedding HpCTL into pCTL is proved using this
translation. Finally, the relative decidability of HpCTL with respect to pCTL is proved using this embedding
theorem. These embedding and relative decidability results allow us to reuse the standard pCTL-based prob-
abilistic model checking algorithms to verify hierarchical randomized systems that can be described using
HpCTL.
1 INTRODUCTION
1.1 Aims
In this study, we develop a new temporal logic for
hierarchical probabilistic model checking, which is
a new model checking paradigm that can appropri-
ately verify hierarchical randomized (or stochastic)
systems. Model checking is a formal method for
automatically verifying concurrent systems (Clarke
and Emerson, 1981; Cavada et al., 2015; Holzmann,
2006; Clarke et al., 2018), and has been extended
to probabilistic model checking (Aziz et al., 1995;
Bianco and de Alfaro, 1995; Kwiatkowska et al.,
2011; Baier et al., 2018) and hierarchical model
checking (Kamide and Kaneiwa, 2009; Kaneiwa and
Kamide, 2011; Kamide, 2015; Kamide and Yano,
2017). Thus, the objective of this study is to in-
tegrate these extended model checking paradigms.
Computation tree logic (CTL) (Clarke and Emerson,
1981) has been typically used as a theoretical basis for
model checking. In fact, the model checker known as
NuSMV (Cavada et al., 2015) was developed based
on CTL. However, CTL is unsuitable for verifying hi-
erarchical randomized systems because it lacks the
constructors to represent “hierarchical randomized”
systems naturally. Thus, CTL has been extended
to probabilistic computation tree logics (Aziz et al.,
1995; Bianco and de Alfaro, 1995) and hierarchical
(or sequential) computation tree logics (Kamide and
Kaneiwa, 2009; Kaneiwa and Kamide, 2011; Kamide
and Yano, 2017; Kamide, 2018). The main aim of
this study is to integrate these extended logics for ob-
taining a theoretical basis for hierarchical probabilis-
tic model checking.
1.2 Probabilistic Computation Tree
Logic
Several probabilistic computation tree logics and their
variants have been studied to handle randomized
(or stochastic) systems (Aziz et al., 1995; Bianco
and de Alfaro, 1995; Kamide and Koizumi, 2015;
Kamide and Koizumi, 2016). A probabilistic com-
putation tree logic, pCTL, was studied by Aziz et
al. (Aziz et al., 1995) and Bianco and de Alfaro
(Bianco and de Alfaro, 1995). This pCTL was ob-
tained from CTL by adding some probabilistic or
probability operators, such as P
≥x
. The formulas of
the form P
≥x
α are intended to read “the probabil-
ity of α holding in the future evolution of the sys-
tem is at least x.” In (Bianco and de Alfaro, 1995),
the logic pCTL was studied to verify the reliabil-
ity properties and performance of the systems mod-
762
Kamide, N. and Yano, Y.
Towards Hierarchical Probabilistic CTL Model Checking: Theoretical Foundations.
DOI: 10.5220/0007456507620769
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 762-769
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

eled by discrete Markov chains, and the complexi-
ties of model-checking algorithms with regard to the
logic were also clarified. In (Aziz et al., 1995), ef-
ficient model checking algorithms for various exten-
sions of the previous settings of pCTL were pro-
posed to verify probabilistic non-deterministic con-
current systems, wherein probabilistic behavior coex-
ists with non-determinism. The difference between
the pCTL-settings of Aziz et al. (Aziz et al., 1995)
and those of Bianco and de Alfaro (Bianco and de Al-
faro, 1995) is the settings of the probability measures
within the probabilistic Kripke structures of pCTL. In
(Kamide and Koizumi, 2015; Kamide and Koizumi,
2016), the inconsistency-tolerant (or paraconsistent)
probabilistic computation tree logic, PpCTL, which
was obtained from pCTL by adding a paraconsis-
tent negation connective ∼, was developed on the ba-
sis of a probability-measure-independent translation
of PpCTL into pCTL. The theorem for embedding
PpCTL into pCTL was shown using this translation,
and entailed the relative decidability of PpCTL with
respect to pCTL. This result indicates that we can
reuse the existing pCTL-based model checking algo-
rithms of Aziz et al. (Aziz et al., 1995) and Bianco
and de Alfaro (Bianco and de Alfaro, 1995) to the
PpCTL-based model checking algorithms. Hence, the
aim of this study is to progress in this direction for hi-
erarchical probabilistic model checking.
1.3 Hierarchical Computation Tree
Logic
Several hierarchical (or sequential) computation tree
logics and their variants have been studied to han-
dle hierarchical systems (Kamide and Kaneiwa, 2009;
Kaneiwa and Kamide, 2011; Kamide, 2015; Kamide
and Yano, 2017; Kamide, 2018). A modal operator
called a sequence modal operator, which is denoted
as [b] where b is a sequence, is used in these hier-
archical computation tree logics. The formulas of the
form [b
1
; b
2
;···; b
n
]α intuitively mean that “α is true
based on a sequence b
1
; b
2
;···; b
n
of ordered pieces
of information.” For more information on [b], see Re-
mark 2.6 in Section 2. In (Kamide, 2015), an exten-
sion of CTL, which was called the sequence-indexed
paraconsistent computation-tree logic, SPCTL, was
introduced by adding [b] and ∼ to CTL. This logic
was used to verify clinical reasoning systems. In
(Kamide and Kaneiwa, 2009; Kaneiwa and Kamide,
2011), an extension of the full computation tree
logic (CTL
∗
), which was called CTLS
∗
, was devel-
oped by adding [b] to CTL
∗
. This logic was used
to represent conceptual hierarchies and ontologies.
In (Kaneiwa and Kamide, 2010), an extension of
the linear-time temporal logic (LTL) (Pnueli, 1977),
which was called the sequence-indexed linear-time
temporal logic, SLTL, was introduced by adding [b]
to LTL. In addition, a proof system for SLTL was de-
veloped to verify certain specifications of secure au-
thentication systems. In (Kamide and Yano, 2017;
Kamide, 2018), an extension of CTL, which was
called the sequential computation tree logic, sCTL,
was introduced by adding [b] to CTL. The logic sCTL
has a simple single satisfaction relation, which is
compatible with that of CTL. Thus, the aim of this
study is to move in this direction for hierarchical
probabilistic computation tree logic. In fact, the logic
proposed in this study is regarded as an extension of
sCTL.
1.4 Results
In this study, a simple new extended computation tree
logic called hierarchical probabilistic computation
tree logic, HpCTL, which can appropriately represent
hierarchical information and probabilistic phenom-
ena, is developed by extending pCTL and sCTL. Fur-
thermore, a probability-measure-independent transla-
tion from HpCTL into pCTL is defined, and a theorem
for embedding HpCTL into pCTL is proved using this
translation. In addition, the relative decidability the-
orem of HpCTL with respect to pCTL is proved us-
ing this embedding theorem. This relative decidabil-
ity theorem indicates that the decidability of pCTL
implies the decidability of HpCTL. Moreover, these
embedding and relative decidability results allow the
efficient reuse of the standard pCTL-based probabilis-
tic model checking algorithms to verify hierarchical
randomized systems that can be modeled and spec-
ified using HpCTL. The previously proposed logics
CTLS
∗
(Kamide and Kaneiwa, 2009; Kaneiwa and
Kamide, 2011), SLTL (Kaneiwa and Kamide, 2010),
and SPCTL (Kamide, 2015) had complex multiple
sequence-indexed satisfaction relations |=
ˆ
d
, where
ˆ
d
represents sequences. On the other hand, the pro-
posed logic HpCTL has a simple single satisfaction
relation |=
?
, which is highly compatible with the stan-
dard single satisfaction relation of CTL. By using this
simple satisfaction relation, the theorem for embed-
ding HpCTL into pCTL can be simply proved, and the
sequence modal operator [b] can be formalized and
handled uniformly.
The remainder of this paper is organized as fol-
lows. In Section 2, we define pCTL and intro-
duce HpCTL based on the single satisfaction relation
|=
?
. In Section 3, we define a probability-measure-
independent translation function from HpCTL into
pCTL, which is considered a simplification of the
Towards Hierarchical Probabilistic CTL Model Checking: Theoretical Foundations
763

translation functions used in (Kamide and Kaneiwa,
2009; Kaneiwa and Kamide, 2010; Kaneiwa and
Kamide, 2011; Kamide, 2015). The theorem for em-
bedding HpCTL into pCTL is proved using the pro-
posed translation function, and the relative decidabil-
ity theorem for HpCTL is obtained using this em-
bedding theorem. In Section 4, we address some il-
lustrative examples for hierarchical probabilistic CTL
model checking based on HpCTL. In Section 5, we
present our concluding remarks.
2 LOGICS
Formulas of probabilistic computation tree logic
(pCTL) are constructed from countably many propo-
sitional variables, → (implication) ∧ (conjunction),
∨ (disjunction), ¬ (classical negation), X (next), G
(globally), F (eventually), U (until), R (release), A
(all computation paths), E (some computation path),
P
≤x
(less than or equal probability), P
≥x
(greater than
or equal probability), P
<x
(less than probability), and
P
>x
(greater than probability). The symbols X, G, F,
U, and R are called temporal operators, the symbols
A and E are called path quantifiers, and the symbols
P
≤x
, P
≥x
, P
<x
, and P
>x
are called probabilistic op-
erators or probability operators. A formula P
≤x
α is
intended to read “the probability of α is at least x.”
We use the symbol Φ to denote a non-empty set of
propositional variables. We use an expression A ≡ B
to denote the syntactical identity between A and B.
Definition 2.1. Formulas α of pCTL are defined by
the following grammar, assuming p ∈ Φ and x ∈ [0,1]:
α ::= p | α→α | α ∧ α | α ∨ α | ¬α
| AXα | EXα | AGα | EGα | AFα | EFα
| A(αUα) | E(αUα) | A(αRα) | E(αRα)
| P
≤x
α | P
≥x
α | P
<x
α | P
>x
α.
In this definition, pairs of symbols like AG and
EU are indivisible, and the symbols X,G,F,U and R
cannot occur without being preceded by an A or an E.
Similarly, every A or E must have one of X, G, F, U
and R to accompany it.
Definition 2.2 (pCTL). A structure (S, S
0
,R,µ
s
,L) is
a probabilistic model iff
1. S is the set of states,
2. S
0
is a set of initial states and S
0
⊆ S,
3. R is a binary relation on S which satisfies the con-
dition:
∀s ∈ S ∃s
0
∈ S [(s, s
0
) ∈ R],
4. µ
s
is a certain probability measure (or probability
distribution) concerning s ∈ S: a set of paths be-
ginning at s is mapped into a real number in [0,1],
5. L is a mapping from S to the power set of Φ.
A path in a model is an infinite sequence of states,
π = s
0
,s
1
,s
2
,... such that
∀i ≥ 0 [(s
i
,s
i+1
) ∈ R].
A probabilistic satisfaction relation (M,s) |= α for
any formula α, where M is a probabilistic model
(S, S
0
,R, µ
s
,L) and s represents a state in S, is defined
inductively by:
1. for any p ∈ Φ, (M, s) |= p iff p ∈ L(s),
2. (M, s) |= α ∧ β iff (M, s) |= α and (M, s) |= β,
3. (M, s) |= α ∨ β iff (M, s) |= α or (M, s) |= β,
4. (M, s) |= α→β iff (M, s) |= α implies (M, s) |= β,
5. (M, s) |= ¬α iff (M, s) 6|= α,
6. (M, s) |= AXα iff ∀s
1
∈ S [(s,s
1
) ∈ R implies (M,s
1
) |=
α],
7. (M, s) |= EXα iff ∃s
1
∈ S [(s,s
1
) ∈ R and (M, s
1
) |= α],
8. (M, s) |= AGα iff for all paths π ≡ s
0
,s
1
,s
2
,..., where
s ≡ s
0
, and all states s
i
along π, we have (M, s
i
) |= α,
9. (M, s) |= EGα iff there is a path π ≡ s
0
,s
1
,s
2
,..., where
s ≡ s
0
, and for all states s
i
along π, we have (M,s
i
) |= α,
10. (M, s) |= AFα iff for all paths π ≡ s
0
,s
1
,s
2
,..., where
s ≡ s
0
, there is a state s
i
along π such that (M,s
i
) |= α,
11. (M, s) |= EFα iff there is a path π ≡ s
0
,s
1
,s
2
,..., where
s ≡ s
0
, and for some state s
i
along π, we have (M, s
i
) |=
α,
12. (M, s) |= A(αUβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
j
along π such that
(M, s
j
) |= β and ∀0 ≤ k < j (M, s
k
) |= α,
13. (M, s) |= E(αUβ) iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for some state s
j
along π, we have
(M, s
j
) |= β and ∀0 ≤ k < j (M, s
k
) |= α,
14. (M, s) |= A(αRβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
j
along π, we have
(M, s
j
) |= β or ∃0 ≤ k < j (M, s
k
) |= α,
15. (M, s) |= E(αRβ) iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for all states s
j
along π, we have
(M, s
j
) |= β or ∃0 ≤ k < j (M, s
k
) |= α,
16. for any x ∈ [0,1], M,s |= P
≤x
α iff µ
s
({w ∈ Ω
s
| M, s |=
α}) ≤ x,
17. for any x ∈ [0,1], M,s |= P
≥x
α iff µ
s
({w ∈ Ω
s
| M, s |=
α}) ≥ x,
18. for any x ∈ [0,1], M,s |= P
<x
α iff µ
s
({w ∈ Ω
s
| M, s |=
α}) < x,
19. for any x ∈ [0,1], M,s |= P
>x
α iff µ
s
({w ∈ Ω
s
| M, s |=
α}) > x.
A formula α is valid in pCTL iff (M, s) |= α holds
for any probabilistic model M := (S,S
0
,R, µ
s
,L), any
s ∈ S, and any probabilistic satisfaction relation |= on
M.
Remark 2.3.
1. The definition of µ
s
is not precisely and explicitly
given in this paper. The reasons are as follows. (1)
the proposed translation from HpCTL into pCTL
is independent of the setting of µ
s
. (2) There are
many possibilities for defining µ
s
.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
764

2. In (Bianco and de Alfaro, 1995), two probability
measures µ
+
s
and µ
−
s
, called minimal probability
and maximal probability, respectively, are intro-
duced for pCTL. The measures µ
+
s
and µ
−
s
are
defined on a Borel σ-algebra B
s
(⊆ 2
Ω
s
) as fol-
lows: for any ∆ ∈ B
s
, µ
+
s
(∆) = sup µ
s,η
(∆) and
µ
−
s
(∆) = in f µ
s,η
(∆) where µ
s,η
with a strategy η
concerning nondeterminism is a unique probabil-
ity measure on B
s
.
3. In (Aziz et al., 1995), a probability measure µ
s
concerning some discrete Markov processes and
discrete generalized Markov processes is intro-
duced for pCTL. µ
s
is defined as a mapping from
C
s
into [0, 1] where C
s
is a Borel sigma field,
which is the class of subsets of the set of all in-
finite state sequences starting at s.
The language of hierarchical probabilistic com-
putation tree logic (HpCTL) is obtained from that
of pCTL by adding [b] (hierarchical operator or se-
quence modal operator) where b is a sequence. Se-
quences are constructed from atomic sequences,
/
0
(empty sequence) and ; (composition). The set of se-
quences (including the empty sequence
/
0) is denoted
as SE. Lower-case letters b, c, ... are used to denote
sequences. An expression [
/
0]α means α, and expres-
sions [
/
0 ; b]α and [b ;
/
0]α mean [b]α. The symbol
Φ is used to denote a non-empty set of propositional
variables, the symbol Φ
[d]
(d ∈ SE) is used to denote
the set {[d]p | p ∈ Φ}, and the symbol Φ
d
(d ∈ SE) is
used to denote the set {p
d
| p ∈ Φ} of propositional
variables where p
/
0
means p. Note that Φ
[
/
0]
= Φ
/
0
= Φ.
Definition 2.4. Formulas α and sequences b of
HpCTL are defined by the following grammar, as-
suming p and e represent propositional variables and
atomic sequences, respectively:
α ::= p | α→α | α ∧ α | α ∨ α | ¬α
| AXα | EXα | AGα | EGα | AFα | EFα
| A(αUα) | E(αUα) | A(αRα) | E(αRα)
| P
≤x
α | P
≥x
α | P
<x
α | P
>x
α.
b ::= e |
/
0 | b ; b.
We use an expression [d] to represent
[d
0
][d
1
]· · · [d
i
] with i ∈ ω, d
i
∈ SE and d
0
≡
/
0.
We remark that [d] can be the empty sequence, and
that [d] is not uniquely determined. For example,
if d ≡ d
1
; d
2
; d
3
where d
1
, d
2
and d
3
are atomic
sequences, then [d] means [d
1
][d
2
][d
3
], [d
1
; d
2
][d
3
],
[d
1
][d
2
; d
3
] or [d
1
; d
2
; d
3
]. We also note that [d] can
be [d] (i.e., [d] includes [d]).
Definition 2.5 (HpCTL). A structure (S, S
0
,R, µ
s
,L
?
)
is a hierarchical probabilistic model iff
1. S is the set of states,
2. S
0
is a set of initial states and S
0
⊆ S,
3. R is a binary relation on S which satisfies the con-
dition:
∀s ∈ S ∃s
0
∈ S [(s, s
0
) ∈ R],
4. µ
s
is a certain probability measure concerning s ∈
S: a set of paths beginning at s is mapped into a
real number in [0,1],
5. L
?
is a mapping from S to the power set of
[
d∈SE
Φ
[d]
.
A path in a hierarchical probabilistic model is an
infinite sequence of states, π = s
0
,s
1
,s
2
,... such that
∀i ≥ 0 [(s
i
,s
i+1
) ∈ R].
A hierarchical probabilistic satisfaction relation
(M, s) |=
?
α for any formula α, where M is a hierar-
chical probabilistic model (S, S
0
,R, µ
s
,L
?
) and s rep-
resents a state in S, is defined inductively by:
1. for any p ∈ Φ, (M, s) |=
?
[d]p iff [d]p ∈ L
?
(s),
2. (M, s) |=
?
[d][b]α iff (M,s) |=
?
[d ; b]α,
3. (M, s) |=
?
[d](α ∧ β) iff (M,s) |=
?
[d]α and (M, s) |=
?
[d]β,
4. (M, s) |=
?
[d](α ∨ β) iff (M,s) |=
?
[d]α or (M,s) |=
?
[d]β,
5. (M, s) |=
?
[d](α→β) iff (M, s) |=
?
[d]α implies
(M, s) |=
?
[d]β,
6. (M, s) |=
?
[d]¬α iff (M,s) 6|=
?
[d]α,
7. (M, s) |=
?
[d]AXα iff ∀s
1
∈ S [(s, s
1
) ∈ R implies
(M, s
1
) |=
?
[d]α],
8. (M, s) |=
?
[d]EXα iff ∃s
1
∈ S [(s,s
1
) ∈ R and
(M, s
1
) |=
?
[d]α],
9. (M, s) |=
?
[d]AGα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
i
along π, we have
(M, s
i
) |=
?
[d]α,
10. (M, s) |=
?
[d]EGα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for all states s
i
along π, we have
(M, s
i
) |=
?
[d]α,
11. (M, s) |=
?
[d]AFα iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
i
along π such that
(M, s
i
) |=
?
[d]α,
12. (M, s) |=
?
[d]EFα iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for some state s
i
along π, we have
(M, s
i
) |=
?
[d]α,
13. (M, s) |=
?
[d]A(αUβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, there is a state s
j
along π such that
(M, s
j
) |=
?
[d]β and ∀0 ≤ k < j (M, s
k
) |=
?
[d]α,
14. (M, s) |=
?
[d]E(αUβ) iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for some state s
j
along π, we have
(M, s
j
) |=
?
[d]β and ∀0 ≤ k < j (M, s
k
) |=
?
[d]α,
15. (M, s) |=
?
[d]A(αRβ) iff for all paths π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and all states s
j
along π, we have
(M, s
j
) |=
?
[d]β or ∃0 ≤ k < j (M, s
k
) |=
?
[d]α,
Towards Hierarchical Probabilistic CTL Model Checking: Theoretical Foundations
765

16. (M, s) |=
?
[d]E(αRβ) iff there is a path π ≡ s
0
,s
1
,s
2
,...,
where s ≡ s
0
, and for all states s
j
along π, we have
(M, s
j
) |=
?
[d]β or ∃0 ≤ k < j (M, s
k
) |=
?
[d]α,
17. for any x ∈ [0,1], M, s |=
?
[d]P
≤x
α iff µ
s
({w ∈
Ω
s
| M, s |=
?
[d]α}) ≤ x,
18. for any x ∈ [0,1], M, s |=
?
[d]P
≥x
α iff µ
s
({w ∈
Ω
s
| M, s |=
?
[d]α}) ≥ x,
19. for any x ∈ [0,1], M, s |=
?
[d]P
<x
α iff µ
s
({w ∈
Ω
s
| M, s |=
?
[d]α}) < x,
20. for any x ∈ [0,1], M, s |=
?
[d]P
>x
α iff µ
s
({w ∈
Ω
s
| M, s |=
?
[d]α}) > x.
A formula α is valid in HpCTL iff (M, s) |=
?
α
holds for any hierarchical probabilistic model M :=
(S, S
0
,R, µ
s
,L
?
), any s ∈ S, and any hierarchical prob-
abilistic satisfaction relation |=
?
on M.
Remark 2.6.
1. The following clauses hold for any formula α, and
any sequences b,c and d,
(a) (M, s) |=
?
[b][c]α iff (M, s) |=
?
[b ; c]α,
(b) (M, s) |=
?
[d]α iff (M,s) |=
?
[d]α.
2. The following formulas are valid in HpCTL: For
any formulas α and β, and any sequences b,c and
d,
(a) [b](α ] β) ↔ ([b]α) ] ([b]β)
where ] ∈ {∧,∨,→},
(b) [b]]α ↔ ][b]α
where ] ∈ {¬,AX,EX,AG,EG, AF, EF},
(c) [b](A(αUβ)) ↔ A(([b]α)U([b]β)),
(d) [b](E(αUβ)) ↔ E(([b]α)U([b]β)),
(e) [b](A(αRβ)) ↔ A(([b]α)R([b]β)),
(f) [b](E(αRβ)) ↔ E(([b]α)R([b]β)),
(g) [b][c]α ↔ [b ; c]α,
(h) [d]α ↔ [d]α.
3. The operator [b] is useful for representing infor-
mative and highly complex hierarchical systems
with the concepts of hierarchical information, hi-
erarchical trees, orders, and ontologies. This
is plausible because a sequence structure gives
a monoid hM,;,
/
0i with the following informa-
tional interpretation (Wansing, 1993): (1) M is
a set of pieces of ordered information (i.e., a set
of sequences), (2) ; is a binary operator (on M)
that combines two pieces of information (i.e., it
is a concatenation operator on sequences), and
(3)
/
0 is an empty piece of information (i.e., an
empty sequence). Then, the formulas of the form
[b
1
; b
2
;·· · ; b
n
]α intuitively mean that “α is true
based on a sequence b
1
; b
2
;·· · ; b
n
of ordered
pieces of information.” Furthermore, the formu-
las of the form [
/
0]α, which coincide with α, in-
tuitively mean that “α is true without any infor-
mation (i.e., it is an eternal truth in the sense of
classical logic).”
3 EMBEDDING AND RELATIVE
DECIDABILITY
Definition 3.1. The language L
h
(the set of formulas)
of HpCTL is defined using Φ , →, ∧, ∨, ¬, X, G, F, U,
R, A, E, P
≤x
,P
≥x
,P
<x
,P
>x
, and [b]. The language
L of pCTL is obtained from L
h
by adding Φ
d
and
deleting [b].
A mapping f from L
h
to L is defined inductively
by:
1. for any p ∈ Φ, f ([d]p) := p
d
∈ Φ
d
, especially
f (p) := p,
2. f ([d][b]α) := f ([d ; b]α), especially f ([d]α) :=
f ([d]α),
3. f ([d](α ] β)) := f ([d]α) ] f ([d]β) where ] ∈
{→,∧, ∨},
4. f ([d]]α) := ] f ([d]α) where ] ∈ {¬, AX, EX, AG,
EG,AF, EF, P
≤x
,P
≥x
,P
<x
,P
>x
},
5. f ([d]A(αUβ)) := A( f ([d]α)U f ([d]β)),
6. f ([d]E(αUβ)) := E( f ([d]α)U f ([d]β)),
7. f ([d]A(αRβ)) := A( f ([d]α)R f ([d]β)),
8. f ([d]E(αRβ)) := E( f ([d]α)R f ([d]β)).
Proposition 3.2. Let f be the mapping defined in Def-
inition 3.1. The following conditions hold for any se-
quences b,c, d and k:
1. f ([d][b][c]α) = f ([d][b ; c]α),
2. f ([d][k]α) = f ([d][k]α).
Lemma 3.3. Let f be the mapping defined in Defi-
nition 3.1. For any hierarchical probabilistic model
M := (S, S
0
,R, µ
s
,L
?
) of HpCTL and any hierarchical
probabilistic satisfaction relation |=
?
on M, we can
construct a probabilistic model N := (S, S
0
,R, µ
s
,L)
of pCTL and a probabilistic satisfaction relation |=
on N such that for any formula α in L
h
, any d ∈ SE,
and any state s in S,
(M, s) |=
?
[d]α iff (N,s) |= f ([d]α).
Proof. Suppose that M is a hierarchical proba-
bilistic model (S, S
0
,R, µ
s
,L
?
) such that
L
?
is a mapping from S to the power set of
[
d∈SE
Φ
[d]
.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
766

We then define a probabilistic model N :=
(S, S
0
,R, µ
s
,L) such that
1. L is a mapping from S to the power set of
[
d∈SE
Φ
d
,
2. for any s ∈ S and any p ∈ Φ,
[d]p ∈ L
?
(s) iff p
d
∈ L(s).
Then, this lemma is proved by induction on the
complexity of α.
• Base step:
Case α ≡ p where p ∈ Φ: We obtain: (M,s) |=
?
[d]p iff (M, s) |=
?
[d]p iff [d]p ∈ L
?
(s) iff p
d
∈
L(s) iff (N, s) |= p
d
iff (N, s) |= f ([d]p) (by the
definition of f ) iff (N, s) |= f ([d]p) (by the defini-
tion of f ).
• Induction step: We show some cases.
1. Case α ≡ [b]β: (M, s) |=
?
[d][b]β iff (M, s) |=
?
[d ; b]β iff (N, s) |= f ([d ; b]β) (by induction hy-
pothesis) iff (N, s) |= f ([d ; b]β) (by the definition
of f ) iff (N, s) |= f ([d][b]β) (by the definition of
f ).
2. Case α ≡ β→γ: We obtain: (M, s) |=
?
[d](β→γ)
iff (M, s) |=
?
[d]β implies (M,s) |=
?
[d]γ iff
(N,s) |= f ([d]β) implies (N, s) |= f ([d]γ) (by in-
duction hypothesis) iff (N, s) |= f ([d]β)→ f ([d]γ)
iff (N, s) |= f ([d](β→γ)) (by the definition of f ).
3. Case α ≡ ¬β: We obtain: (M, s) |=
?
[d]¬β iff
(M, s) 6|=
?
[d]β iff (N, s) 6|= f ([d]β) (by induc-
tion hypothesis) iff (N,s) |= ¬ f ([d]β) iff (N, s) |=
f ([d]¬β) (by the definition of f ).
4. Case α ≡ AXβ: We obtain: (M,s) |=
?
[d]AXβ iff
∀s
1
∈ S [(s,s
1
) ∈ R implies (M,s
1
) |=
?
[d]β] iff
∀s
1
∈ S [(s, s
1
) ∈ R implies (N, s
1
) |= f ([d]β)] (by
induction hypothesis) iff (N, s) |= AX f ([d]β) iff
(N,s) |= f ([d]AXβ) (by the definition of f ).
5. Case α ≡ AGβ: We obtain:
(M, s) |=
?
[d]AGβ
iff for all paths π ≡ s
0
,s
1
,s
2
,..., where s ≡ s
0
, and
all states s
i
along π, we have (M, s
i
) |=
?
[d]β
iff for all paths π ≡ s
0
,s
1
,s
2
,..., where s ≡ s
0
, and
all states s
i
along π, we have (N, s
i
) |= f ([d]β)
(by induction hypothesis)
iff (N, s) |= AG f ([d]β)
iff (N, s) |= f ([d]AGβ) (by the definition of f ).
6. Case α ≡ A(βUγ): We obtain:
(M, s) |=
?
[d]A(βUγ)
iff for all paths π ≡ s
0
,s
1
,s
2
,..., where s ≡ s
0
, there
is a state s
j
along π such that (M, s
j
) |=
?
[d]γ
and ∀0 ≤ k < j (M,s
k
) |=
?
[d]β
iff for all paths π ≡ s
0
,s
1
,s
2
,..., where s ≡ s
0
, there
is a state s
j
along π such that (N, s
j
) |= f ([d]γ)
and ∀0 ≤ k < j (N,s
k
) |= f ([d]β) (by induction
hypothesis)
iff (N, s) |= A( f ([d]β)U f ([d]γ))
iff (N, s) |= f ([d]A(βUγ)) (by the definition of f ).
7. Case α ≡ P
≤x
β: We obtain: (M, s) |=
?
[d]P
≤x
β iff
µ
s
({w ∈ Ω
s
| (M,w) |=
?
[d]β}) ≤ x iff µ
s
({w ∈
Ω
s
| (N,w) |= f ([d]β)}) ≤ x (by induction hy-
pothesis) iff (N, s) |= P
≤x
f ([d]β) iff (N, s) |=
f ([d]P
≤x
β) (by the definition of f ).
Lemma 3.4. Let f be the mapping defined in Def-
inition 3.1. For any probabilistic model N :=
(S, S
0
,R, µ
s
,L) of pCTL and any probabilistic satis-
faction relation |= on N, we can construct a hier-
archical probabilistic model M := (S, S
0
,R, µ
s
,L
?
) of
HpCTL and a hierarchical probabilistic satisfaction
relation |=
?
on M such that for any formula α in L
h
,
any d ∈ SE, and any state s in S,
(N,s) |= f ([d]α) iff (M,s) |=
?
[d]α.
Proof. Similar to the proof of Lemma 3.3.
Theorem 3.5 (Embedding). Let f be the mapping de-
fined in Definition 3.1. For any formula α,
α is valid in HpCTL iff f (α) is valid in pCTL.
Proof. By Lemmas 3.3 and 3.4.
Theorem 3.6 (Relative decidability). If the model-
checking, validity, and satisfiability problems for
pCTL with a probability measure are decidable, then
the model-checking, validity, and satisfiability prob-
lems for HpCTL with the same probability measure
as that of pCTL are also decidable.
Proof. Suppose that the probability measure µ
s
in the hierarchical probabilistic model (S, S
0
,R, µ
s
,
L
?
) of HpCTL is the same as the probabilistic model
(S, S
0
,R, µ
s
, L) of pCTL. Suppose also that pCTL
with µ
s
is decidable. Then, by the mapping f defined
in Definition 3.1, a formula α of HpCTL can be
transformed into the corresponding formula f (α) of
pCTL. By Lemmas 3.3 and 3.4 and Theorem 3.5, the
model checking, validity and satisfiability problems
for HpCTL can be transformed into those of pCTL.
Since the model checking, validity and satisfiability
problems for pCTL with µ
s
are decidable by the
assumption, the problems for HpCTL with µ
s
are also
decidable.
Towards Hierarchical Probabilistic CTL Model Checking: Theoretical Foundations
767

Remark 3.7.
1. The model checking problem for pCTL with the
probability measures µ
+
s
and µ
−
s
introduced by
Bianco and de Alfaro was shown to be decidable
in (Bianco and de Alfaro, 1995).
2. The model checking problem for pCTL with the
probability measure µ
s
introduced by Aziz et al.
was shown to be decidable in (Aziz et al., 1995).
3. An extension of HpCTL with the above-mentioned
probability measures by Bianco and de Alfaro or
by Aziz et al. is also decidable by Theorem 3.6.
4. The complexities of the decision procedures for
the model checking, validity, and satisfiability
problems of HpCTL are the same as those of
pCTL, since the translation function f defined in
Definition 3.1 is a polynomial time reduction.
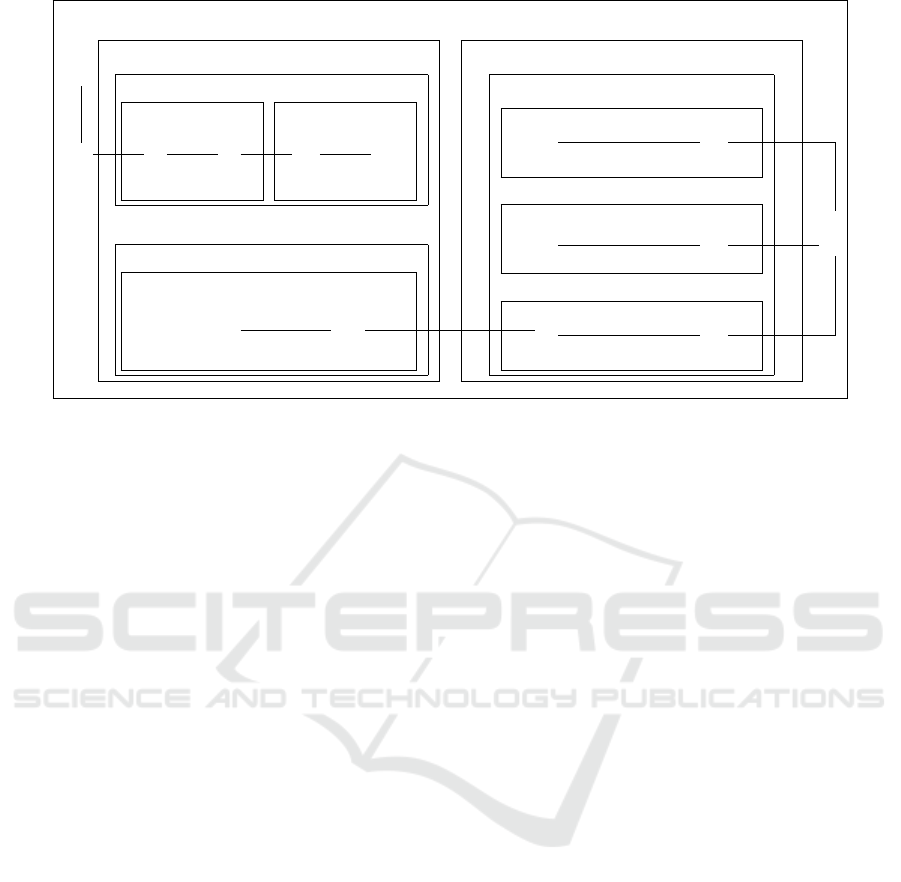
4 ILLUSTRATIVE EXAMPLES
We present an illustrative example for hierarchical
probabilistic CTL model checking. Here, we consider
the scenario presented in Figure 1, which shows a
hierarchical probabilistic structure of students’ learn-
ing processes in a university setting. In this figure,
a student who is learning the natural sciences (e.g.,
physics) and engineering (e.g., electronics) will grad-
uate from the university. In this model, the entrance
examination pass rate is 60 % and the average exami-
nation pass rate varies among the courses.
In this example, we can declare the hierarchy of
the academic subjects: science, mathematics, anal-
ysis, vector analysis, electromagnetics, engineering,
electronics, power electronics, and semiconductor en-
gineering as the sequence modal operator:
1. [Science ; Mathematics ; Analysis ; Vector analysis],
2. [Science ; Physics ; Electromagnetics],
3. [Engineering ; Electronics ; Telecoms engineering],
4. [Engineering ; Electronics ; Power electronics],
5. [Engineering ; Electronics ; Semiconductor engineering].
The first expression shows that the concept
Vector analysis is a subconcept of Analysis, the con-
cept of Analysis is a subconcept of Mathematics, and
Mathematics is a subconcept of Science.
We can use some probabilistic operators to repre-
sent certain probabilistic phenomena concerning the
learning process. As previously mentioned, the for-
mula of the form P
≥x
α is intended to read “the prob-
ability of α holding in the future evolution of the sys-
tem is at least x.” Thus, we can describe and verify
the following statement using HpCTL:
“If a student is learning in the second stage
of the subject of “Telecoms engineering” and
he or she understands the subject sufficiently,
then there is approximately an 80 % chance
that he or she will graduate some time in the
near future.”
This statement is true, and is expressed formally as:
[Engineering ; Electronics ; Telecoms engineering]
(AG(stage2 ∧ learning ∧ understand →
EF(P
≤0.85
graduate ∧ P
≥0.75
graduate)).
Moreover, if we can use the paraconsistent nega-
tion connective ∼, we can also express the nega-
tion of ambiguous concepts. If we cannot deter-
mine whether someone understands the underlying
subject, then the ambiguous concept understand can
be represented by asserting the following inconsistent
formula: understand ∧ ∼understand. However, the
classical negation connective ¬ is appropriate for de-
scribing the negation of the non-ambiguous concept
learning.
5 CONCLUDING REMARKS
In this study, the new logic HpCTL and its transla-
tion into the standard logic pCTL were developed to
obtain a theoretical foundation for hierarchical prob-
abilistic CTL model checking. We demonstrated that
the existing probabilistic model checking algorithms
for pCTL can be reused for hierarchical probabilis-
tic model checking as described using HpCTL. More-
over, we noted that the complexity of the model-
checking algorithms for HpCTL is the same as that of
pCTL. In addition, some illustrative examples for hi-
erarchical probabilistic CTL model checking was pre-
sented in this study.
Prospective courses of study may involve extend-
ing the proposed logic by adding a paraconsistent
negation connective. An extended hierarchical com-
putation tree logic with a paraconsistent negation con-
nective was studied in (Kamide, 2015). By combin-
ing our present work with that in (Kamide, 2015), we
hope to establish the theoretical foundations of hi-
erarchical inconsistency-tolerant probabilistic model
checking based on such an extended logic.
ACKNOWLEDGEMENTS
This research was supported by the Kayamori
Foundation of Informational Science Advancement,
JSPS KAKENHI Grant Numbers JP18K11171,
JP16KK0007 and JSPS Core-to-Core Program (A.
Advanced Research Networks).
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
768
[Science] [Engineering]
[Mathematics]
[Physics]
[Electronics]
[Analysis] [Vector analysis]
[Electromagnetics]
[Semiconductor engineering]
[Power electronics]
[Telecoms engineering]
enter
60%
stage1
learning
stage2 stage1
learning
stage2
95%
stage1
∼understand
understand
¬learning
stage2
understand
learning
90%
stage1
∼understand
stage2
understand
85%
stage1
∼understand
stage2
understand
stage1
∼understand
stage2
understand
85%
graduate
x x x x x
x x
x x
x x
x x
x
?
- - - -
-
- -
?
*
- -
-
- -
6
Figure 1: A hierarchical learning process model for academic subjects.
REFERENCES
Aziz, A., Singhal, V., and Balarin, F. (1995). It usually
works: The temporal logic of stochastic systems. In
Proceedings of the 7th Int. Conf. on Computer Aided
Verification (CAV 1995), Lecture Notes in Computer
Science 939, pages 155–165.
Baier, C., de Alfaro, L., Forejt, V., and Kwiatkowska, M.
(2018). Model Checking Probabilistic Systems, In:
Handbook of Model Checking, pp. 963-999. Springer.
Bianco, A. and de Alfaro, L. (1995). Model checking of
probabilistic and nondeterministic systems. In Pro-
ceedings of the 15th Conf. on Foundations of Soft-
ware Technology and Theoretical Computer Science
(FSTTCS 1995), Lecture Notes in Computer Science
1026, pages 499–513.
Cavada, R., Cimatti, A., Jochim, C., Keighren, G., Olivetti,
E., Pistore, M., Roveri, M., and Tchaltsev, A. (2015).
NuSMV 2.6 user manual, 144 pages. Online available.
Clarke, E. and Emerson, E. (1981). Design and synthesis of
synchronization skeletons using branching time tem-
poral logic. In Lecture Notes in Computer Science,
volume 131, pages 52–71.
Clarke, E., Henzinger, T., Veith, H., and Bloem, R. (2018).
Handbook of Model Checking. Springer.
Holzmann, G. (2006). The SPIN model checker: Primer
and reference manual. Addison-Wesley.
Kamide, N. (2015). Inconsistency-tolerant temporal rea-
soning with hierarchical information. Information Sci-
ences, 320:140–155.
Kamide, N. (2018). Logical foundations of hierarchical
model checking. Data Technologies and Applications,
52 (4):539–563.
Kamide, N. and Kaneiwa, K. (2009). Extended full
computation-tree logic with sequence modal operator:
Representing hierarchical tree structures. Proceedings
of the 22nd Australasian Joint Conference on Artifi-
cial Intelligence (AI’09), Lecture Notes in Artificial
Intelligence, 5866:485–494.
Kamide, N. and Koizumi, D. (2015). Combining paracon-
sistency and probability in ctl. Proceedings of the 7th
International Conference on Agents and Artificial In-
telligence (ICAART 2015), 2:285–293.
Kamide, N. and Koizumi, D. (2016). Method for combin-
ing paraconsistency and probability in temporal rea-
soning. Journal of Advanced Computational Intelli-
gence and Intelligent Informatics, 20:813–827.
Kamide, N. and Yano, R. (2017). Logics and translations
for hierarchical model checking. Proceedings of the
21st International Conference on Knowledge-Based
and Intelligent Information and Engineering Systems
(KES2017), Procedia Computer Science, 112:31–40.
Kaneiwa, K. and Kamide, N. (2010). Sequence-indexed
linear-time temporal logic: Proof system and applica-
tion. Applied Artificial Intelligence, 24 (10):896–913.
Kaneiwa, K. and Kamide, N. (2011). Conceptual modeling
in full computation-tree logic with sequence modal
operator. International Journal of Intelligent Systems,
26 (7):636–651.
Kwiatkowska, M., Norman, G., and Parker, D. (2011).
Prism 4.0: Verification of probabilistic real-time sys-
tems. Proceedings of the 23rd International Confer-
ence on Computer Aided Verification (CAV 11), Lec-
ture Notes in Computer Science, 6806:585–591.
Pnueli, A. (1977). The temporal logic of programs. In Pro-
ceedings of the 18th IEEE Symposium on Foundations
of Computer Science, pages 46–57.
Wansing, H. (1993). The logic of information structures.
In Lecture Notes in Computer Science, volume 681,
pages 1–163.
Towards Hierarchical Probabilistic CTL Model Checking: Theoretical Foundations
769
