
HFDSegNet: Holistic and Generalized Finger Dorsal ROI Segmentation
Network
Gaurav Jaswal
1
, Shreyas Patil
2
, Kamlesh Tiwari
3
and Aditya Nigam
1
1
School of Computing and Electrical Engineering, Indian Institute of Technology Mandi, India
2
Department of Electrical Engineering, Indian Institute of Technology Jodhpur, India
3
Department of Computer Science and Information Systems, Birla Institute of Technology and Science Pilani, India
Keywords:
Faster RCNN, Finger Knuckle Biometrics.
Abstract:
The aforementioned works and other analogous studies in finger knuckle images recognition have claimed
that the precise detection of true features is difficult from poorly segmented images and the main reason for
matching errors. Thus, an accurate segmentation of the region of interest is very crucial to achieve superior
recognition results. In this paper, we have proposed a novel holistic and generalized segmentation Network
(HFDSegNet) that automatically categorizes the given finger dorsal image obtained from multiple sensory
resources into particular class and then extracts three possible ROIs (major knuckle, minor knuckle and nail)
accurately. To best of our knowledge, this is the first attempt, an end-to-end trained object detector inspired
by Deep Learning technique namely faster R-CNN (Region based Convolutional Neural Network) has been
employed to detect and localize the position of finger knuckles and nail, even finger images exhibit blur,
occlusion, low contrast etc. The experimental results are examined on two publicly available databases named
as Poly-U contact-less FKI data-set, and Poly U FKP database. The proposed network is trained only over
500 randomly selected images per database, demonstrate the outstanding performance of proposed ROI’s
segmentation network.
1 INTRODUCTION
Biometry based authentication solutions have been
used in large scale security and privacy applications
like mobile device, surveillance etc (Jain et al., 2004).
As for as features of Palmer region of hand is con-
cerned, palm-print, fingerprint, palm vein and hand
geometry are the ideal biometric traits (Bera et al.,
2014). In earlier studies, fingerprint provided the ba-
sis for personal identification. Apart from its exten-
sive usages, fingerprint requires high quality images
(> 400d pi) for accurate results as well as its features
deteriorate with sharp cuts/ injuries which limit its
role in certain commercial applications (Kumar and
Kwong, 2013). Also, the quality of fingerprint of
laborers or cultivators is not very good to be used
for recognition (Jaswal et al., 2017b). Similarly, in-
stead of having the bigger ROI region, a palm con-
sist of limited systematic line features and may under-
gone impostor attacks because most of the time peo-
ple leave their palm print or fingerprint unintention-
ally. While, geometrical features of palm/ finger are
not very much unique for identification (). The vein
traits in hand are distinctive, difficult to spoof but re-
quires extra imaging devices (Kumar and Prathyusha,
2009). On the contrary, the skin patterns over finger
dorsal surface are unaffected or naturally preserved.
(Jaswal et al., 2016).
1.1 Finger Knuckle Anatomy and
Challenges
The basic epidermis structure appearing on the dor-
sal surface of finger is named as finger knuckle image
(FKI) pattern (Zhang et al., 2010). It mainly consists
of rich convex like lines, corner points, skin folds, and
gray-mutation regions specifically around the finger
joints. The three joints in a finger lie in between one
of three bone groups called as the distal, proximal,
and middle phalanx (Kumar and Xu, 2016). The epi-
dermal cells near knuckle mature very early stage of
development and rarely change during an adult’s life.
Its failure to enroll rate (FTE) is observed to be lower
and can be acquired easily using an inexpensive setup
with lesser user cooperation (Jaswal et al., 2017a).
Moreover, the dorsal knuckle patterns are invariant
786
Jaswal, G., Patil, S., Tiwari, K. and Nigam, A.
HFDSegNet: Holistic and Generalized Finger Dorsal ROI Segmentation Network.
DOI: 10.5220/0007568307860793
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 786-793
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

to emotions/ behavioural aspects and cannot be easily
manipulated (Kumar and Xu, 2016). However, there
exist several challenge in FKI recognition that are to
be solve for superior performance: (1) Track the mid-
dle knuckle line for FKI registration because the posi-
tion of fingers deviate during contact-less acquisition.
(2) Control varying illumination and lighting affects
for outdoor conditions (3) Automatically segment the
major, minor finger knuckle and nail ROI’s consis-
tently (4) Improve the matching accuracy of major,
minor finger knuckle and nail recognition. (5) De-
velop non-uniform databases in which images incor-
porate the real world situations such as non-stretch
palm or bending of fingers.
1.2 Problem Statement
Beside the possibility of simultaneous acquisition
and highly stable patterns of major and minor finger
knuckles, FKI is still not enough mature to be used
solely in personnel security applications like mobile
devices, forensic etc. Grouping of a major, and mi-
nor finger knuckles may take the advantage to im-
prove the performance of single modality based FKI
recognition systems. However, the performance is of-
ten affected by inconsistent ROI segmentation, vary-
ing lighting situations, sensor accuracy etc and it is
important to minimize these factors at initial level.
Specifically, it can be summarize that the performance
of consistent ROI extraction performs a key part in the
performance of a biometric system, since the succes-
sive processing units has to work over the extracted
ROI region. Therefore, the exact ROI segmentation
of major and minor knuckles is very crucial for do-
ing point-wise correspondence of image patches. In
view of above mentioned FKI challenges, this work
has been proposed to automatically segment the ma-
jor and minor (upper) finger knuckles on PolyU FKI
data set using deep learning criteria. Moreover, we
have investigated the possibility of another region of
interest near finger nail as a part of finger dorsal fea-
ture which have not yet attracted the attention. Till
date no other work has been reported that exploits nail
feature over this data-set.
Contribution: We present a two fold problem,
as image classification network (handled via ResNet)
for categorizing the multi sensory input data and as
ROI segmentation for extraction of four (1-PolyU
FKP; 3-PolyU FKI) ROI’s (handled via Modified R-
CNN. Our proposed holistic and generalized Fin-
ger Knuckle Segmentation Network (HFDSegNet)
provide a single fully automated network for finger
knuckle image ROI extraction that can be trained and
perform well for two type of finger knuckle databases.
In this architecture, a trained ResNet50 model (He
et al., 2016) is first used to identify the object class of
the given finger knuckle. The classified finger image
is further given as input to a modified deep learning
network which actually provides three region of inter-
est in that image as shown in Fig. 1. In practice, the
deep learning network has been trained almost simi-
lar to state-of-art faster R-CNN (Girshick et al., 2014)
by explicitly reformulate the layers as learning func-
tions. Also, it can further classify the extracted ROI’s
of particular data-set into respective classes (major or
minor or finger nail), so that it can later be matched
with the appropriate gallery sample. For more rigor-
ous experimentation, we have involved two publicly
available finger knuckle databases i.e., PolyU contact-
less finger knuckle image (FKI) database (56, 6 13)
and PolyU finger knuckle print (FKP) data-set (55,
2009). To the best of our knowledge, this is the first
holistic deep learning architecture utilized to classify
and localize the ROI of any type of finger knuckle
image. One of the major implementations break-
through achieved wad that we have managed to train
the entire network with only 500 images per dataset
whereas generally any deep learning network takes
huge amount of data to train. The performance of ROI
segmentation algorithm is measured in terms of IOU,
accuracy, precision, and recall. The remainder of arti-
cle is organized into following main sections: Section
2 summarizes the state-of-art studies for FKI recogni-
tion. In section 3, the proposed ROI extraction algo-
rithm is presented including image classification and
training/testing strategy. Then, experimental results
and comparative analysis are presented in section 4.
Finally, the important findings and future scope are
drawn in the last section.
2 RELATED WORK
The present state of art studies in the area of finger
knuckle recognition can be mainly grouped into fol-
lowing main implementations: ROI extraction, qual-
ity assessment, ROI enhancement, feature extraction
and finally, the most crucial matching.
2.1 ROI Extraction
In real sense, major finger knuckle is the most stud-
ied biometric identifier among knuckle print studies
whereas minor finger knuckle and nail are still not
much explored. Most of the major knuckle ROI ex-
traction methods are based on local convexity char-
acteristics of the line patterns on the middle knuckle
region. In (Zhang et al., 2010), authors computed
HFDSegNet: Holistic and Generalized Finger Dorsal ROI Segmentation Network
787

Figure 1: Finger Knuckle Image Annotation: (a) PolyU FKI Sample, (b) PolyU FKP Sample.
convexity magnitude to detect the center of the mid-
dle finger joint and for that encoded image pixels
as (1, -1). In (Nigam et al., 2016), authors pro-
posed an idea to locate middle knuckle point by which
finger knuckle ROI can be segmented consistently.
They used magnitude responses of two curvature Ga-
bor filters with fine tune parameters to locate cen-
tral knuckle line. In (Kumar and Xu, 2016), authors
proposed ROI segmentation framework for major and
minor finger knuckles using local image processing
operations on contact-less images.
2.2 Feature Extraction/Classification
In (Zhang et al., 2009), authors proposed competi-
tive code in which orientation information of major
knuckle pattern is extracted through the use of ga-
bor filter. In (Kumar and Ravikanth, 2009), authors
resolved the problems occurring in finger knuckle
recognition due to challenging knuckle images. In
(Kumar and Prathyusha, 2009), authors stated bio-
metric fusion of knuckle shape and vein features to
validate the identity of individuals. In (Kumar, 2012),
first time ever the usages of upper minor finger knuck-
les for personnel identification is presented. In an-
other hand dorsal study (Kumar, 2014), importance of
lower minor finger knuckles and palm dorsal region
for personal authentication is discussed. In (Jaswal
et al., 2017a), authors presented a score level fusion
of multiple texture features obtained from local trans-
formations schemes and performed multi-scale based
matching. In latest work (Chlaoua et al., 2018), au-
thors extracted the middle knuckle features by deep
learning based PCANet model as well as performed
hashing and multi-class classification. In another lat-
est work (Zhai et al., 2018), authors made efforts
to improve recognition performance of hand crafted
features and proposed Convolutional Neural Network
(CNN) architecture with data augmentation and batch
normalization.
3 PROPOSED ROI EXTRACTION
NETWORK
There have been no research work till now that adopts
deep methods for FKI ROI segmentation. We pro-
pose an end-to-end deep network architecture for FKI
ROI segmentation that can efficiently minimize the
poor segmentation results. The main aim of proposed
ROI extraction approach is to consistently segment
the fixed size ROI’s from PIP, DIP, and finger nail
regions. For this, a two stage end-to-end network
(HFDSegNet) has been trained using modified faster
RCNN, which takes any finger as input and results
into different type of ROI regions.
3.1 HFDSegNet: The Network
Architecture
Various deep learning methods have been developed
and achieve significant progress in object classifica-
tion and localization. The goal of any image classifi-
cation challenge is to train a model that can correctly
classify an input image. The proposed HFDSegNet
consists of two main stages: (i) Object classification-
ResNet and (ii) Object localization- Modified R-
CNN. In this work, we have two state-of-art finger
knuckle databases available, namely PolyU FKP and
PolyU contact-less FKI database.
3.1.1 Classification Network: ResNet-50
The proposed HFDSegNet is trained in such a way
that first it categorize the given input image into ei-
ther Class-1 (PolyU FKP) or Class-2 (PolyU contact-
less FKI) database for the purpose of next level pro-
cessing. For this, a well known state-of-art model
ResNet50 has been used because it is very easy
to implement and train. There are other ResNet
(ResNet101, ResNet-152) variants are available but
this particular model more correctly classifies the
given input image into two categories.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
788

3.1.2 ROI Segmentation: Modified R-CNN with
Inception-v3
To keep in mind time complexity of existing ROI net-
works like YOLO, R-CNN etc, we have selected a
network which has the most optimum ratio of the time
consumed, the computations performed and the accu-
racy required in the field of biometrics. Therefore,
a network inspired from Faster R-CNN architecture
has been presented that gives much better accuracy
as well as transferable features than current state-of-
art studies. As shown in Fig 2, proposed modified
R-CNN comprises of three major modules such as:
1. Shared Layers of Inception-V3: In this work,
a set of convolutional layers are selected form a
pre-trained network namely Inception-V3 for ex-
traction of best possible line features. we have
truncated the pre-train Inception-v3 network by
detaching the whole fully connected layers. Thus,
we have only left with 2D convolution layers for
extraction of feature map. Now at first level of
the detection, we take the output feature map of
last convolution layer of Inception with dimension
17× 17× 768. Since, last layers of Inception-v3 is
helpful to provide mixed kind of knuckle features,
so we only take feature map from last 2D convo-
lution layer. Further, we lower the total number
of channels from 768 to 128 (using 1 × 1 convo-
lutions) for memory requirement. Till this level,
we have only concentrated on global knuckle fea-
tures. However for localization of different traits,
context information also play a crucial part. As
context information is important hence we have
included three context layers with 7 × 7, 5 × 5
and 3 × 3 filters. However, small sequential fil-
ters take few hyper-parameters than large filters,
so we consider small filters. The context informa-
tion of three types of filters will further merged
and given as input to classification and regression
head which will give the classification score and
regression output respectively. Up to this level,
first we take the feature map of last layer of Incep-
tion, then we apply Max-pooling over that for get-
ting more global features, finally this output fea-
ture map has been given to context module.
2. Region Proposal Network (RPN): RPN is a net-
work that takes in an input of size 3*3 from the
feature map obtained from the shared layers. It
then considers several anchor boxes of different
scales and aspect ratios, so as to select the best fit
anchor box for every ground truth bounding box.
The anchor boxes are chosen to be scale and shape
invariant. By default, three aspect ratios and three
scales are considered, yielding nine anchor boxes
at each (3 × 3) patch position. Later on, it selects
the coordinates of these anchor boxes by regress-
ing them w.r.t the ground truth bounding box. The
similarity between the anchor and the bounding
boxes are measured using Intersection over Union
(IOU). For each of the bounding box, at-least one
anchor has to be chosen. These anchor boxes are
further pruned to one (in case if they are more)
per bounding box, using non-maximum suppres-
sion(NMS). The RPN network, gives an output of
4K and K values, signifying the coordinates of the
K anchor boxes (4 values per box) and the proba-
bility (one value per box) of box existence respec-
tively.
3. ROI Pooling and Classification (Conv2D-512
Filters, Relu) and Regression (Conv2D-2048
Filters, Relu) Heads: An arbitrary sized matrix
given as input (as previously defined by RPN) to
ROI pooling to reduce the dimension of feature
maps. It maps the RPN region into a fixed size
(14 × 14) vector, and applies max pooling over
such a re-sized grid. It is easy to back propagate
through this layer as it is just a max pooling ap-
plied over to different regions of a feature map.
Finally, the network turns into two heads pre-
dicting the class scores and bounding box coor-
dinates. The multiple regions obtained after ROI
pooling are finally fed to a network consisting of
a few convolutional layers and a few fully con-
nected layers to predict the class scores and the
bounding box coordinates.
3.2 Testing and Training Strategy
The training and testing strategy were performed in
two phases to ascertain the usefulness of proposed
KHSegNet for the ROI segmentation.
3.2.1 Training
1. Ground Truth Generation: The ground truth
with respect to two type of finger knuckle images
has been generated using (Kumar and Ravikanth,
2009; Nigam et al., 2016) respectively. This is
performed because the RPN is trained as a regres-
sor and the probabilities and the coordinates of the
anchor boxes have to be generated so as to pro-
vide a ground truth for calculating the loss. The
RPN, outputs 4K and K values corresponding to
K anchor boxes for each n × n input. For gener-
ating the ground truth for the RPN we have used
IOU as a similarity measure between the anchor
boxes and the bounding boxes provided as ground
truth for probability prediction. The anchor boxes
HFDSegNet: Holistic and Generalized Finger Dorsal ROI Segmentation Network
789
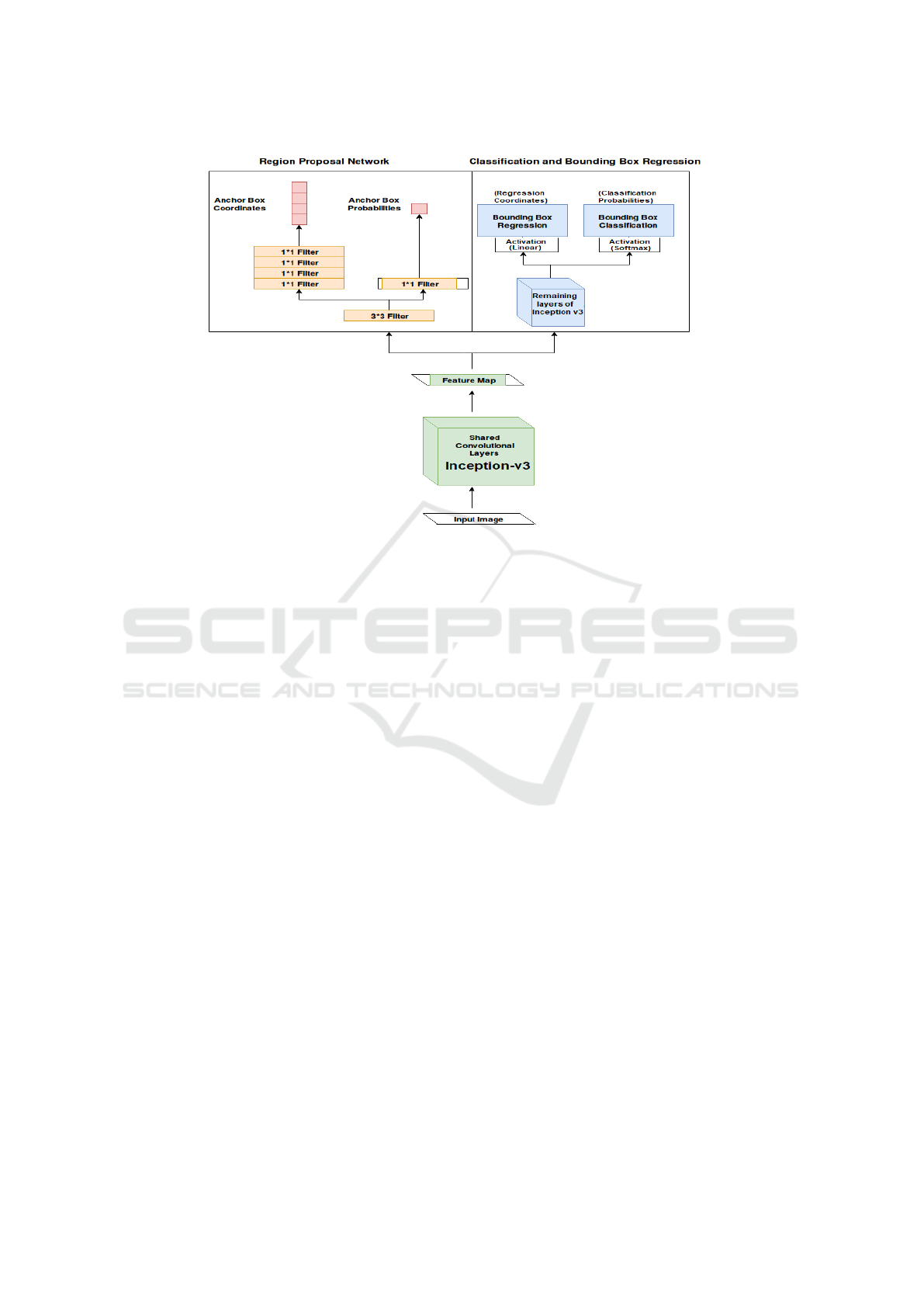
Figure 2: ROI segmentation Architecture: Modified R-CNN.
with the maximum IOU while compared with the
ground truth are given high probabilities, termed
“positive”. It is ensured that each of the bounding
boxes has to have at-least one positive anchor box
corresponding to it.
2. Training RPN Network: Initially, we have
trained the region proposal network along with the
shared layers using the above computed ground
truths for the RPN. We are training modified R-
CNN from scratch rather than considering pre-
trained weights in order to make out the trained
model as problem specific as possible. One has
to notice that RPN along with the shared layers
has to be trained as an end-to-end network so as
to achieve good performance.
3. Training Classification and Regression Heads:
In the next step, we have to train the classifica-
tion and the regression heads using the obtained
region proposals. This also has to be carried out
in end-to-end fashion through ROI pooling layer
and shared convolutional layers.
4. Fine Tuning RPN, Classification and Regres-
sion Heads: Once we have trained the shared lay-
ers for RPN and both heads (as in Steps (2),(3)),
the best possible and discriminative features have
been learned at shared layers attaining the max-
imum accuracy. But the problem is, that RPN
is trained as end-to-end in Step (2), along with
shared layers. Hence, we have fine tuned the RPN
layers keeping the shared layers frozen, in order to
learn the anchor box prediction and their probabil-
ities. Similarly, the classification and regression
heads has to be fine tuned in order to take a differ-
ent feature map as an input, keeping the weights
of shared layers frozen, to get satisfactory results.
5. Losses: In order to train proposed HFDSegNet,
the four type of training losses are considered: (i)
RPN regression loss, (ii) RPN classification loss,
(iii) Final regression loss and (iv) final classifica-
tion loss. For each epoch, RPN network is first
trained and then the final regression and classifi-
cation heads is trained. The loss functions consid-
ered for trait classification and RPN classification
are “categorical cross-entropy” and “binary cross
entropy” respectively. In addition, mean squared
error (MSE) loss function has been used for re-
gression of both region proposal network as well
as bounding boxes.
Size Invariant Network: Our network can take in-
put of any size (size invariant), mainly because of this
tweaked implementation of RPN and the classifica-
tion and regression heads. The region proposal net-
work has been implemented as convolutional layers
and the ground truth is corresponding to the image
size, making our RPN size invariant. In the case of
classification and regression heads, the ROI pooling
layer serves this purpose, as the pooling layers take in
any arbitrary sized region of interest (ROI) and pools
it into a fixed sized output as discussed above. This
fixed sized output has been fed to a network consist-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
790
ing of convolutional and fully connected layers, mak-
ing the classification and regression heads size invari-
ant too. All the network hyper-parameters, have been
selected “empirically” by maximizing the system per-
formance over a validation set.
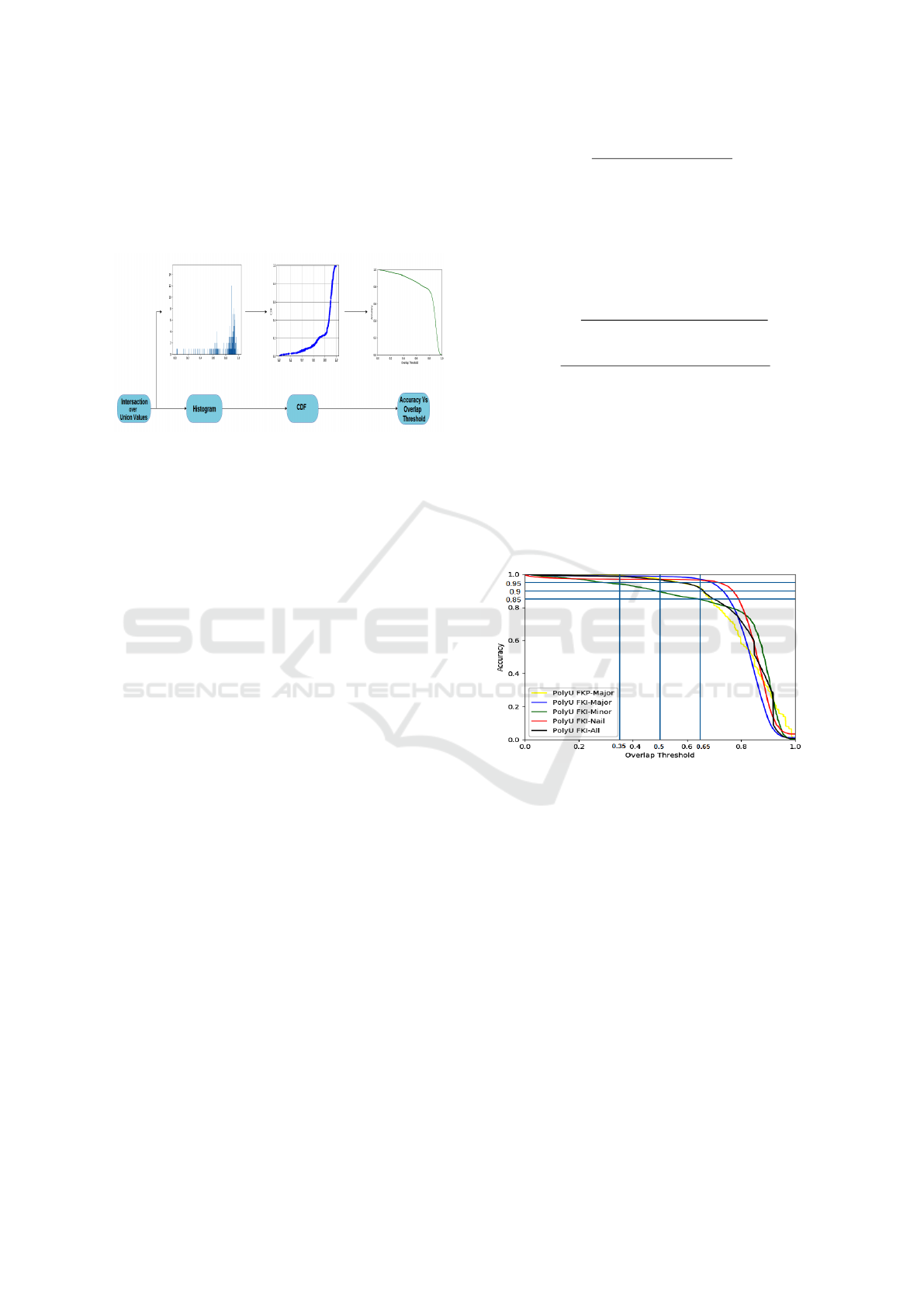
Figure 3: Steps involved for generating Accuracy Vs IOU
Graph
3.2.2 Testing
In case of class-2 database, We have used only 500
images for training while around 2015 images has
been used for testing in order to generate the response
of proposed HFDSegNet. Likewise, the equal number
of 500 images of class-2 database has been selected
for training. The trained network has been tested by
evaluating IOU, that we have used to obtain the accu-
racy of our proposed network. It is the most widely
used evaluating parameter, to check the efficiency of
any algorithm/ network, for object localization. Iter-
ative thresholding has been applied to over each of
the traits individually, as well over all the traits to de-
termine the individual trait as well as overall perfor-
mance analysis.
(a) Accuracy Vs IOU Graph: To visualize sys-
tem performance, we have plotted a graph, show-
ing accuracy at each threshold for each trait as well
as overall, as shown in Fig. 3. The IOU ranges
from 0 to 1. Where 0, indicates that the boxes do
not match at all and 1 indicates that the boxes are
perfectly matched. When the threshold is high the
number of images (in %) having IOU more than the
threshold will be less, where as it is 100% at 0 thresh-
old. Such a graph can be plotted as follows : Com-
pute IOU of predicted and ground truth boxes. The
predicted boxes having the same ground truth along
with their respective distance has been considered to
match the boxes in images containing multiple boxes.
Generate a histogram over IOU values at an step of
0:00001 so as to get a smooth curve. Normalize it, so
as to get a probability distribution function (PDF) and
compute its cumulative distribution function (CDF).
Accuracy at each IOU threshold (i
t
) can be defined
as : Accuracy =
# test images with IOU >=i
t
# test images
and can be
computed using the Eq. (1), as shown in Fig. 4.
Accuracy = 1 − cd f + Value o f histogram (1)
(b) Precision and Recall: In addition to the accu-
racy values, precision and recall has also been calcu-
lated for the proposed network validation as defined
in Eqs. (2), (3).
Precision =
# o f correct boxes predicted
Total No. o f boxes predicted
(2)
Recall =
# o f correct boxes predicted
Total No. o f Ground truth boxes
(3)
Precision and recall are calculated so as to validate
our approach, while calculating accuracy we only
consider the true predicted boxes and not all the pre-
dicted boxes. Similarly the intersection over union
values calculated are with respect to the ground truth
bounding boxes, but it may so happen that all the
ground truth boxes are not considered while calculat-
ing accuracy, therefore we take into account this detail
while computing the recall values.
Figure 4: The Accuracy Vs. Overlap Threshold Graph.
4 EXPERIMENTAL RESULTS
AND DISCUSSION
This section presents a detail of evaluation param-
eters, datasets and the testing protocol by which
we eveluate the performance of proposed HKSegNet
Segmentation network. For datasets, the two pub-
licly available finger knuckle databases: PolyU FKP
dataset (55, 2009) and PolyU Contactless FKI dataset
(56, 6 13) have been used.
[a] Test-1: In the first test, training for each
database is done using 500 images taken randomly.
The combined Accuracy Vs. Overlap Threshold
graph is shown in Fig. 4, where different colours have
been used to plot the curves for different ROI’s. One
can observe that the network produces high accuracy
HFDSegNet: Holistic and Generalized Finger Dorsal ROI Segmentation Network
791

Table 1: The Accuracy, Precision and Recall Values at different Overlap (IOU) thresholds.
Biometric Traits Accuracy Precision Recall
Overlap IOU Threshold Overlap IOU Threshold Overlap IOU Threshold
0.35 0.5 0.65 0.35 0.5 0.65 0.35 0.5 0.65
PolyU FKP 99.56 98.52 93.15 99.04 98.62 96.97 90.27 8.38 88.12
Major FKI 99.18 98.94 97.88 98.05 97.96 97.34 97.75 97.66 96.68
Minor FKI 95.42 89.36 86.09 95.27 90.22 86.21 97.19 89.30 85.64
Nail 97.82 98.10 97.96 97.62 97.33 97.12 98.25 97.58 97.44
All 99.15 97.36 92.46 98.89 97.76 90.87 98.55 95.09 91.05
Figure 5: ROI obtained for various finger knuckle images
using HFDSegNet.
even up to 0.5 overlap IOU threshold for almost all
the images. A slight accuracy drop has been observed
when overlap IOU threshold becomes more than 0.3,
especially for minor knuckle (Green curve). But, one
can see that it drops gradually. It may be the case
as the curvature features are largely missing in that
region. While the performance of finger nail (Red
curve) is surprisingly observed good, as it sustains the
uniformity up to 0.65 IOU. Similarly the accuracy vs
overlap threshold graph for major knuckle shows that
it outperforms its counterparts at every IOU thresh-
old level. The prime reason behind this is that fin-
ger knuckle image contains features that are easily
distinguishable from the others under their respec-
tive region of interests. The PolyU FKI (Blue curve)
maintains constant accuracy (97.88%) up to 0.65 IOU
while it drops somewhat earlier for PolyU FKP im-
ages. Since, line features are evenly distributed in
case for PolYU FKP samples and most of the pre-
vious approaches tried to obtain the centre line or the
center point (Zhang et al., 2010; Nigam et al., 2016).
Network may not be able to capture such a symmetry
in the finger image. However, this type of accuracy is
considered to be very good in object recognition lit-
erature. From Fig 4 one can infer that the proposed
network has been performing very well across all the
samples. Some network predictions are depicted in
Fig 5. We obtain only major finger knuckle ROI using
PolyU FKP data-set while three ROI’s i.e., major, mi-
nor finger knuckles including finger nail are obtained
from PolyU FKI database.
[b] Test-2: To best of our knowledge, this is the
first ever proposed FKI biometrics deep learning seg-
mentation network. Table 1, shows the values ob-
tained for Accuracy, Precision and Recall for the all
experiments performed. Hence, we have not com-
pared our results with any other method. Although,
one can compare it with the existing techniques, such
as (Kumar and Ravikanth, 2009; Zhang et al., 2010;
Nigam et al., 2016), but such comparison may not be
justified due to two reasons : (i) They had been tested
only over single trait (we have performed multi-class
classification) and (ii) None of them had used deep
learning. Still we have observed that the proposed
network performs better that previous individual trait
techniques.
Figure 6: Failed ROI Images in case of Minor Finger
Knuckle.
[c] Pros and Cons of the Proposed Network:
We have tried to train HFDSegNet on nail bed, which
contains useful structural information. A set of few
images over which the proposed HFDSegNet failed
to segment are shown in Fig 6. The algorithm mainly
fails for Minor FKI due to blurriness, presence of ar-
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
792

tifact/ minor cuts and scrapes etc. While, the results
for major knuckle and finger nail are much more con-
sistent. One most important point to mention is that
our network has just been trained over 500 random
images and performs much better than other existing
state-of-the-art ROI extraction algorithm.
5 CONCLUSION AND FUTURE
SCOPE
In this paper, we have proposed a end-to-end network
for extracting ROIs from any finger knuckle image.
To best of our knowledge, this is the first holistic
architecture proposed so far, segmenting three ROIs
namely major finger knuckle, minor finger knuckle
and finger nail in the image. We have explored the
possibility to extract a complete information from
a finger dorsal region so that it can enumerate the
recognition performance of state-of-art FKI recog-
nition systems. This method provides rotation and
translation error free results and capable of localizing
regions in case of challenging finger kuckle images.
The proposed holistic ROI segmentation network has
been trained with around 500 images and produces
very satisfactory and consistent results. Experimen-
tal results on two FKI data-sets show that our method
outperforms state-of-the-art finger knuckle segmenta-
tion approaches in terms of segmentation accuracy.
This work on holistic finger knuckle segmentation,
opens up the vast opportunities in the field of multi-
biometric authentication systems. In future work, we
will try to compute the recognition performance over
these extracted ROI’s.
REFERENCES
(2006-13). Polyu contact-less finger knuckle im-
age database. http://www4.comp.polyu.edu.hk/∼csa
jaykr/fn1.htm.
(2009). Finger-knuckle-print polyu. https://www4.comp.
polyu.edu.hk/∼biometrics/FKP.htm.
Bera, A., Bhattacharjee, D., and Nasipuri, M. (2014). Hand
biometrics in digital forensics. In Computational In-
telligence in Digital Forensics: Forensic Investigation
and Applications, pages 145–163. Springer.
Chlaoua, R., Meraoumia, A., Aiadi, K. E., and Korichi, M.
(2018). Deep learning for finger-knuckle-print iden-
tification system based on pcanet and svm classifier.
Evolving Systems, pages 1–12.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. pages 580–587.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. pages 770–778.
Jain, A. K., Ross, A., and Prabhakar, S. (2004). An in-
troduction to biometric recognition. IEEE Transac-
tions on Circuits and Systems for Video Technology,
14(1):4–20.
Jaswal, G., Kaul, A., and Nath, R. (2016). Knuckle print
biometrics and fusion schemes–overview, challenges,
and solutions. ACM Computing Surveys (CSUR),
49(2):34.
Jaswal, G., Nigam, A., and Nath, R. (2017a). Deepknuckle:
revealing the human identity. Multimedia Tools and
Applications, pages 1–30.
Jaswal, G., Nigam, A., and Nath, R. (2017b). Finger
knuckle image based personal authentication using
deepmatching. pages 1–8.
Kumar, A. (2012). Can we use minor finger knuckle images
to identify humans? In Biometrics: Theory, Applica-
tions and Systems (BTAS), 2012 IEEE Fifth Interna-
tional Conference on, pages 55–60. IEEE.
Kumar, A. (2014). Importance of being unique from fin-
ger dorsal patterns: Exploring minor finger knuckle
patterns in verifying human identities. IEEE
Transactions on Information Forensics and Security,
9(8):1288–1298.
Kumar, A. and Kwong, C. (2013). Towards contactless,
low-cost and accurate 3d fingerprint identification.
pages 3438–3443.
Kumar, A. and Prathyusha, K. V. (2009). Personal au-
thentication using hand vein triangulation and knuckle
shape. IEEE Transactions on Image processing,
18(9):2127–2136.
Kumar, A. and Ravikanth, C. (2009). Personal authentica-
tion using finger knuckle surface. IEEE Transactions
on Information Forensics and Security, 4(1):98–110.
Kumar, A. and Xu, Z. (2016). Personal identification us-
ing minor knuckle patterns from palm dorsal surface.
IEEE Transactions on Information Forensics and Se-
curity, 11(10):2338–2348.
Nigam, A., Tiwari, K., and Gupta, P. (2016). Multiple
texture information fusion for finger-knuckle-print au-
thentication system. Neurocomputing, 188:190–205.
Zhai, Y., Cao, H., Cao, L., Ma, H., Gan, J., Zeng, J., Pi-
uri, V., Scotti, F., Deng, W., Zhi, Y., et al. (2018).
A novel finger-knuckle-print recognition based on
batch-normalized cnn. In Chinese Conference on Bio-
metric Recognition, pages 11–21. Springer.
Zhang, L., Zhang, L., and Zhang, D. (2009). Finger-
knuckle-print: a new biometric identifier. In 16th
IEEE International Conference on Image Processing,
pages 1981–1984. IEEE.
Zhang, L., Zhang, L., Zhang, D., and Zhu, H. (2010). On-
line finger-knuckle-print verification for personal au-
thentication. Pattern recognition, 43(7):2560–2571.
HFDSegNet: Holistic and Generalized Finger Dorsal ROI Segmentation Network
793
