
A Sensor for the Optical Detection of Dangerous Road Condition
Armando Piccardi and Lorenzo Colace
NooEL - Nonlinear Optics and OptoElectronics Laboratory, Department of Engineering, University of Study "ROMA TRE",
Via Vito Volterra 62, Rome, Italy
Keywords: Optical Sensor, Light Scattering, Polarization Contrast Ratio.
Abstract: We present the design, realization and characterization of a sensor for the optical detection of hazardous
road condition. The device exploits the radiation from a incoherent source to detect the polarized
components of the light scattering from a rough surface and calculate a signal dependent on the surface
state. We propose two distinct geometries, working with forward and backward scattering components,
assessing the device performance in terms of reliability and compactness. In both cases, the sensor allows to
discriminate potentially dangerous states like the presence of water (either wet surface or covered by a
layer) or ice on an asphalt sample, in opposition to the dry surface representing a safe condition.
1 INTRODUCTION
The automotive sector is currently characterized by a
high demand of sensing devices either for the
vehicle performances evaluation or the assessment
of the drivers safety (Guerrero-Ibáñez, 2018). With
reference to the latter, a number of methods and
devices have been proposed in the last years in order
to detect the presence of atmospheric agents on the
road surface. In particular, ice detection rises great
attention because of it is not limited to the
automotive sector, but it cover a range of possible
application ranging from aircraft security to
monitoring of surfaces under extreme conditions
(Flatscher, 2017; Amiropoulos, 2018; Muñoz, 2016).
Nevertheless, the trade off between reliability
and costs if often a limiting factor for a device
thought to meet the market requirements: contact
sensors for example, have high maintenance costs
though they result quite reliable (Zhi, 2015; Roy,
2000). On the contrary, contact-less devices
(Ikiades, 2007) often suffer of poor selectivity to
different agents.
The most used methods exploit capacitive,
piezoelectric or electrical elements to detect
temperature and humidity and evaluate the presence
of ice (Wollenweber, 2018; Tabatabai, 2017).
Optical methods and sensors encompass fiber-
optics, devices based on infrared image processing
light reflection and diffusion at different wavelength
ranges (Abdel-Moati, 2018; Finkele, 1997; Ogura,
2002). In particular, light scattering polarization
have been recently used to detect the presence of ice
or water on asphalt surfaces (Colace, 2013).
In this work, we present the implementation of a
device employing an optical method based on the
detection of the polarization components of infrared
light scattering on asphalt surfaces. Evaluating the
ratio between two orthogonally polarized
components, we manage to distinguish between
several surface conditions and thus between a safe
and potentially dangerous states.
The manuscript is organized as follows: first, the
optical method, the devices components and the
parameters needed to characterize the system are
presented. Then, we will describe the realization of
different versions of the sensor, changing the
geometric arrangement and number of components.
The last section is dedicated to the results and the
discussion about the system performances.
2 PRINCIPLE OF OPERATION
The proposed sensor works with a light source
incident on a sample (asphalt) surface, where the
diffusion process changes the distribution of
orthogonally (TE and TM) polarized components of
the scattered light. In this way, we can obtain
information about the surface under investigation
depending on the detection of the two polarization
components.
Piccardi, A. and Colace, L.
A Sensor for the Optical Detection of Dangerous Road Condition.
DOI: 10.5220/0007572002830288
In Proceedings of the 7th International Conference on Photonics, Optics and Laser Technology (PHOTOPTICS 2019), pages 283-288
ISBN: 978-989-758-364-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
283
In order to implement this method, we need a light
source, some detectors and the electronics to process
the acquired signals and extract the suitable figures
of merit. As done in (Colace, 2013), a useful
parameter is the Polarization Contrast Ratio (PCR),
defined by the difference between the intensities of
the two polarization components (I
TE
, I
TM
)
normalized by the sum of the two:
TMTE
TMTE
II
II
C
(1)
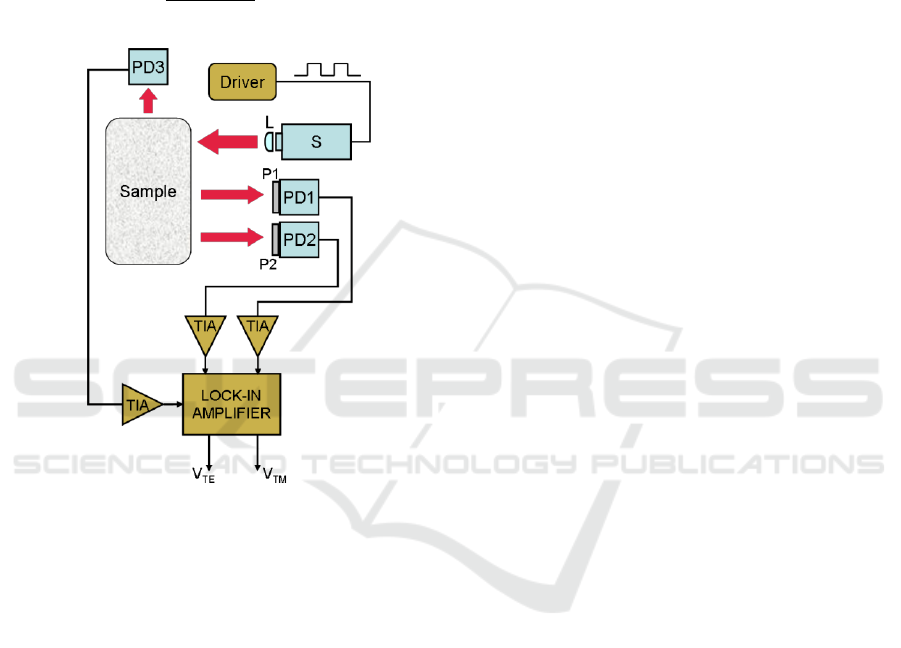
Figure 1: Block diagram of the sensor design. The
modulate source (S) emits radiation collimated by a lens
(L). The scattered light is detected by the three
photodiodes: two (PD1 and PD2) collecting orthogonally
polarized light by employing two polarizers (P1 and P2),
and the third (PD3) detecting the unpolarized light. Trans
impedance amplifiers (TIA) convert the signals to be
processed by the lock-in amplifier. The resulting voltage
values allow the calculation of the PCR.
Moreover, in our work we also considered the
total unpolarized scattering as a parameter to be
measured.
The employed source is a LED operating at
λ=980nm. The chosen wavelength stands in a
spectrum range where polarized scattering is rather
sensitive to material properties; moreover, near
infrared radiation prevents direct disturbance of
human eyes while driving and it is compatible with
reliable and widely available detection components,
in the framework of low cost device realization. A
lens is used to compensate for the source diffraction
and to regulate the spot size on the sample in order
to optimize the detection.
In order to detect the polarized components and
extract the PCR we need two photodetectors, each
one sensitive to one component by employing two
orthogonal polarizers. The detectors are provided
with low pass filters screening any optical
disturbances from ambient light. A third
photodetector is employed to collect the unpolarized
scattering and provide additional formation about
the surface.
The reading electronics converts the current
signals into voltage signals through distinct trans-
impedance amplifiers (TIA) and performs a
homodyne detection through a lock-in amplifier. For
this reason, the source driver is designed in order to
obtain a modulated signal at f=1kHz. The voltage
value carrying the information about the polarization
components of the scattered light are finally ready to
be processed in order to obtain the PCR. We stress
that the latter is calculated as in eq.1, but using the
voltage values corresponding to the intensities of the
polarized components.
The complete set up is sketched in fig. 1.
3 GEOMETRIC
ARRANGEMENTS
Given the working principle of the sensor, the
components and the quantities needed for the surface
detection, we can arrange the set-up in different
ways. The sensor works with scattered light, which
is distributed over a cone depending on the kind of
surface and its roughness as well. For a smooth
sample, we expect the incident radiation to be almost
reflected forward, while for a rough surface, the
light scattering can be supposed isotropic. Thus, the
choice of the position where to detect the scattered
light can affect the system performances. We
investigated two main geometric configurations: the
first has the source and the detectors in a θ-2θ
arrangement, thus detecting the mirror-like polarized
reflections; the second works with backscattering,
thus detecting the radiation diffused backward and it
has the source and the photodiodes arranged in the
same position.
The former geometry allow to operate with
higher signal levels, but it has higher costs linked to
the large area to be dedicated to the sensor. The
latter required higher sensitivity as the backscattered
signals can be considerably lower but is more
convenient in terms of compactness.
PHOTOPTICS 2019 - 7th International Conference on Photonics, Optics and Laser Technology
284
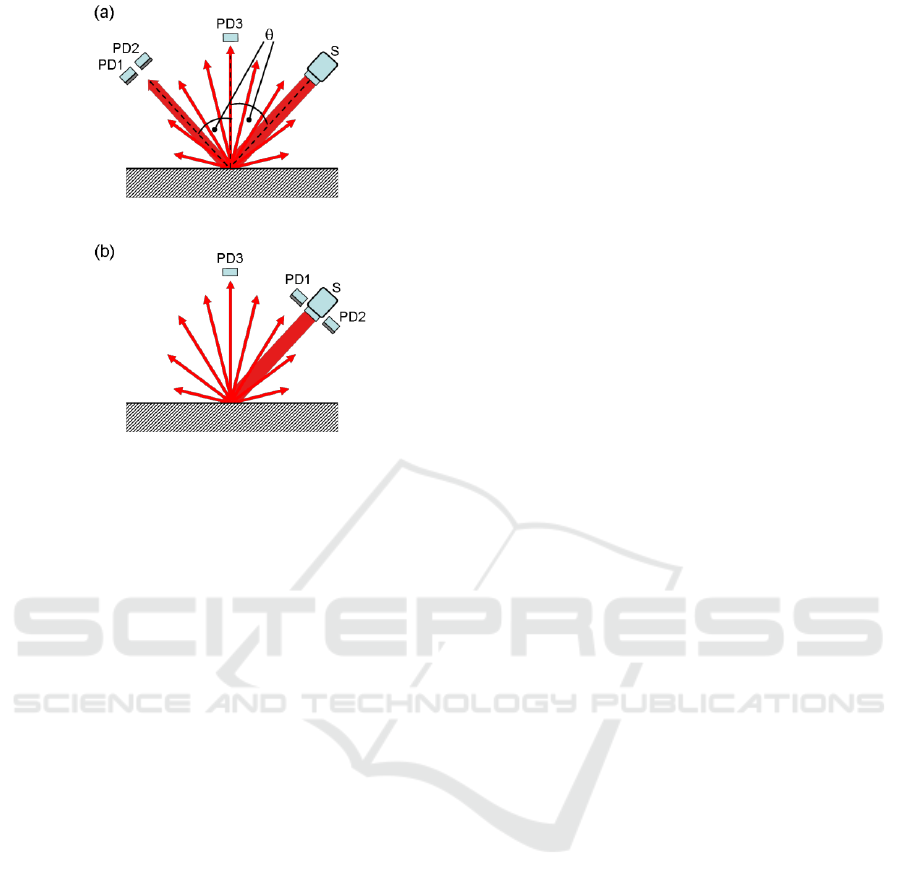
Figure 2: Sketch of the two considered geometries. (a) The
mirror-like configuration exploits the Snell law to detect
the forward scattered light. (b) The backscattering
configuration works with backward diffusion. For both the
configurations, a third photodiode can be added to detect
the unpolarized scattering.
Moreover, the presence of a third photodetector,
collecting the unpolarized scattering to be used as a
further measurement to discriminate between
different surfaces is evaluated. Its position could be
varied as well, but as a reference position we will
consider the direction perpendicular to the surface
normal.
The geometrical arrangements are resumed in
the sketch of fig.2.
4 RESULTS AND DISCUSSION
For both the geometries, the characterization of the
sensor is divided into two parts: a preliminary
measurements is done by varying the incidence
angle of the beam, to check the dependence of the
PCR on the source orientation (Videen, 1992). The
polarization of the source is varied as well, in order
to further improve the system sensitivity to different
conditions, exploiting the polarization dependence
of the Fresnel coefficients. Then, once optimized the
geometry, the detection of the polarization
components and the calculation of the suitable
parameters are performed on asphalt samples.
In all the presented measurements the source has
a power of 18mW and it is at a distance of about
30cm from the surface. We stress that the employed
values can obviously be scaled due to the peculiar
application, but at the moment they try to reproduce
a possible situation when mounting the device on a
moving vehicle or on a road side. Several conditions
have been considered. The safe condition is
indicated by the values provided by dry asphalt,
corresponding to the reference state. Then other
surfaces have been prepared corresponding to
different atmospheric or road conditions, linked to
different level of hazard: wet asphalt, surface
covered by a water layer and the presence of an ice
layer.
4.1 Mirror-like Configuration
For this configuration the source and the detectors
are mounted on a goniometric system ensuring that
incidence and detection angle are equal. Incidence
angle have been varied between 20° and 60° with
respect to the surface normal. Fig. 3 shows the PCR
versus incidence angle for some of the surface
conditions, when the source radiation is unpolarized
or horizontally/vertically polarized.
As it can be seen, both the angle dependence
and the absolute value of PCR are strongly
dependent on polarization. For unpolarized or
horizontally polarized radiation the curves results
superposed, for almost all the angular range. On the
other hand, vertical polarized light allows the
discrimination of different conditions, in particular,
between 50° and 60°. Moreover, for 50° the dry
asphalt (safe) case has the highest value of PCR,
thus it is well distinguishable from the other
conditions. For these reasons, we choose θ=50° to
complete the characterization.
At this angle, we calculate the PCR and plot it
versus the unpolarized scattering. We performed the
measurements a number of times to include the
statistical errors of both measurements, also
considering several samples for each conditions.
Thus, we obtained dispersion graphs on the
parameter space for all the road condition, as
reported in fig.4. In this way, the separation of the
clouds allows finding portions of the parameter
space associated to one state, while clouds
superpositions indicate the possibility of obtaining a
measurement with a certain error percentage.
Fig.4(a) shows a good separation between the
states but for the couple dry-ice, for which we
calculate an error of about 10%. This represents a
problem because the system is interpreting a
potentially dangerous condition as a safe one (or
vice versa). For this reason we checked if it exists
another way to represent the different road
A Sensor for the Optical Detection of Dangerous Road Condition
285

Figure 3: Mirror-like configuration. PCR as a function of
the incidence angle for (a) unpolarized, (b) horizontally
polarized and (c) vertical polarized incident beam.
conditions: we substitute the unpolarized scattering
measurement with the sum of the two polarized
components, so that we plot PCR versus sum.
This choice has the further advantage of
avoiding the presence of the third photodiode,
reducing the complexity and the size of the whole
sensor. Results are shown in fig.4(b).
In the new data representation the different states
are all distinguishable, allowing a good evaluation of
the asphalt conditions. Even if the wet and water
cases results close to each other, in practice they
correspond to similar hazards and thus their wrong
evaluation would have no consequences on the
system performances.
Figure 4: Mirror-like configuration. (a) PCR versus
Unpolarized scattering (V
u
). (b) PCR versus the sum of the
polarization component.
4.2 Backscattering Configuration
The second investigated geometry encompasses
source and detectors on the same side, i.e. it detects
the backscattering from the asphalt surfaces. We
carry out the characterization as for the previous
geometry: first, we identify the optimum sensor
orientation, by measuring the PCR as a function of
the incidence angle for three different polarizations
of the source (unpolarized, horizontal and vertical),
as reported in fig.5.
This geometry allows a better distinction among
the road states than the previous one. Nevertheless,
once again the vertical polarization provides the best
results; in particular, at θ=20° the curves are well
distributed over a quite range of PCR, thus the
complete characterization is performed at this angle.
We plotted the dispersion graphs in both the case
with or without the third photodiodes, i.e.
considering either the unpolarized scattering or the
sum of the orthogonally polarized polarization. In
this case, as visible for the direct comparison
between panels (a) and (b) of fig.6, differences in the
position and distributions of the clouds
corresponding to the road states are negligible: this
means that the two parameters are equivalent and the
PHOTOPTICS 2019 - 7th International Conference on Photonics, Optics and Laser Technology
286
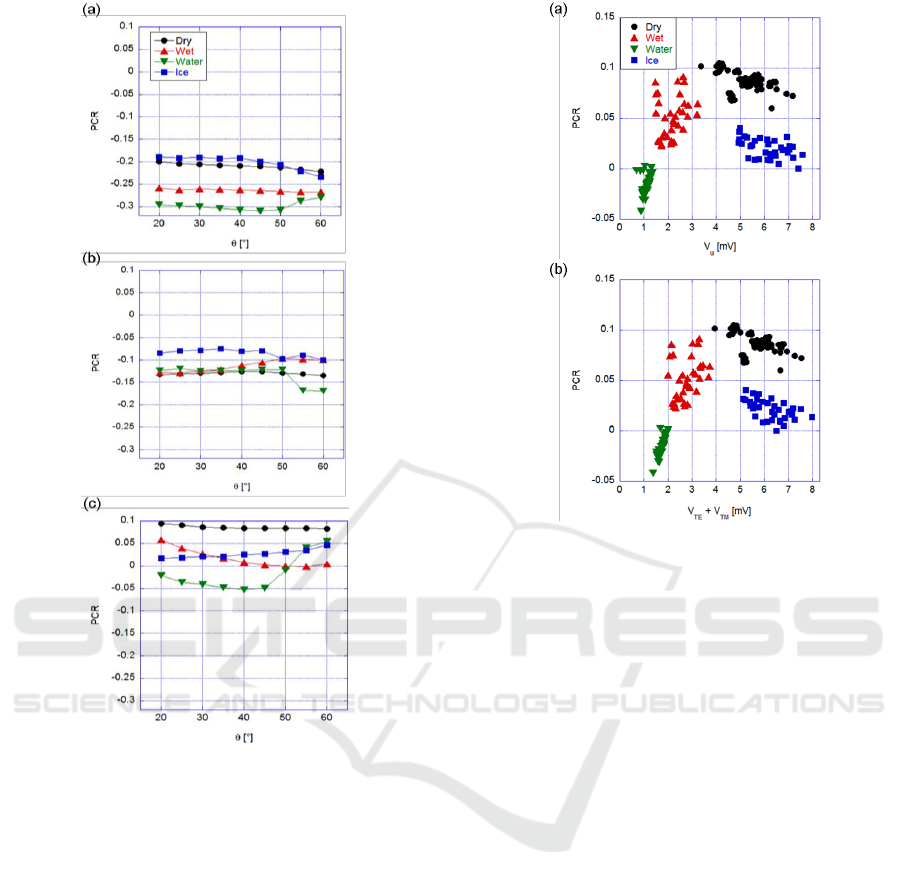
Figure 5: Backscattering radiation. PCR as a function of
the incidence angle for (a) unpolarized, (b) horizontally
polarized and (c) vertical polarized incident beam.
third photodiode is not necessary at all, thus can be
removed with improved sensor compactness and
complexity. Moreover, no superposition of clouds is
present. Thus, it is straightforward to identify the
threshold values and functions for the evaluation of
the surface state, as we do in fig.6(b) where we
proposed an example of space division based on
lines.
With this kind of division the sensor is fully
characterized: when the system is working, the
measurement of PCR and sum of polarized
scattering will generate a point falling into one of the
portions of the parameter space. Thus, a
programmed logic can be implemented to process
the data and give the corresponding indication of the
current road state.
Figure 6: Backscattering configuration. (a) PCR versus
Unpolarized scattering (V
u
). (b) PCR versus the sum of the
polarization component.
5 CONCLUSIONS
We designed, realized and characterized a sensor
able to distinguish among for different conditions -
one safe and three corresponding to different
potentially dangerous situations - of an asphalt
surface, in the framework of road security. The
optical method used for the detection of a surface
state is based on the measurement of the polarization
components of the scattered radiation. The
investigation of different geometries and
configurations allowed to find the optimal set-up in
terms of costs and compactness, and to discriminate
the presence of water or ice on asphalt surfaces with
good reliability. Though in a preliminary version,
the realized device and the detection principle are
promising and deserve further investigation.
Regarding the future developments, the work on the
sensor includes the realization of the logic to process
the raw data and automatically give information
about the surface state and the investigation of other
kind of conditions; on the other hand, statistics about
the raw data are the object of numerical
investigation, in order to improve the detection
reliability, as well as a study on the different textures
of the investigated surfaces.
A Sensor for the Optical Detection of Dangerous Road Condition
287

ACKNOWLEDGEMENTS
This work was supported by ACTPHAST (Access
CenTer for PHotonics InnovAtion Solutions and
Technology Support), grant number P2016-29
(SODARC - Sensor for the Optical detection of
DAngerous Road Conditions).
REFERENCES
Abdel-Moati, H., Morris, J., Zeng, Y., Wesley Corie, M.,
Garas Yanni, V., 2018. Near field ice detection using
infrared based optical imaging technology. Optics &
Laser Technology, 99, 402-410.
Amiropoulos, K., Spasopoulos, D., Ikiades, A., 2018.
Fiber optic sensor for ice detection on aerodynamic
surfaces using plastic optic fiber tapers. Advanced
Photonics (Sensors), OSA Technical Digest, SeM4E.6.
Colace, L., Santoni, F., Assanto, G., 2013. A near-infrared
optoelectronic approach to detection of road
conditions. Optical and Laser Engineering, 51, 633-
636.
Finkele, R., 1997. Optical road-ice detector operating in
the near infrared. Electronic Letters, 33, 1153-1154.
Flatscher, M., Neumayer, M., Bretterklieber, T., 2017.
Maintaining critical infrastructure under cold climate
conditions: a versatile sensing and heating concept.
Sensors and Actuators A: Physical, 267, 538-546.
Guerrero-Ibáñez, J., Zeadally, S., Contreras-Castillo, J.,
2018. Sensor Technologies for Intelligent
Transportation Systems. Sensors, 18, E1212.
Ikiades, A., Howard, G., Armstrong D.J. et al., 2007.
Measurement of optical diffusion properties of ice for
direct detection ice accretion sensors. Sensors and
Actuator A. 140, 24-31.
Muñoz, C., Márquez, F., Tomás, J., 2016. Ice detection
using thermal infrared radiometry on wind turbine
blades. Measurement, 93, 157-163.
Ogura, T., Kageyama, I., Katsuhisa N., et al., 2002. Study
on a road surface sensing system for snow and ice
road. Journal of Society of Automotive Engineers
Review, 23, 333-339.
Roy, S., De Anna, R.G., Mehregani, M., Zakar, E., 2000.
A capacitive ice detection microsensor. Sensor
Materials, 12, 1-14.
Tabatabai, H., Aljuboori, M., 2017. A Novel Concrete-
Based Sensor for Detection of Ice and Water on Roads
and Bridges. Sensors, 17, E2912.
Videen, G., Hsu, J., Bickel, W.S., Wolfe, W.L., 1992.
Polarized light scattered from rough surfaces. Journal
of Optical Society of America, 7, 1111-1118.
Wollenweber, G. C., 2018. US Patent App., 15/275, 013.
Zhi, X., Cho, H.C., Wang, B., Ahn, C.H., Moon, H.S., Go,
J.S., 2015. Development of a Capacitive Ice Sensor to
Measure Ice Growth in Real Time. Sensors, 5, 6688-
6698.
PHOTOPTICS 2019 - 7th International Conference on Photonics, Optics and Laser Technology
288
