
Dynamic Index Tracking via Stochastic Programming
Patrizia Beraldi
1
, Antonio Violi
1,2
, Maria Elena Bruni
1
and Gianluca Carrozzino
1
1
Department of Mechanical, Energy and Management Engineering, University of Calabria, Rende (CS), Italy
2
Decision Lab, Mediterranean University of Reggio Calabria (RC), Italy
Keywords:
Index Tracking, Stochastic Programming, Out-of-Sample Analysis.
Abstract:
Index tracking (IT) is an investment strategy aimed at replicating the performance of a given financial index,
taken as benchmark, over a given time horizon. This paper deals with the IT problem by proposing a stochastic
programming model where the tracking error is measured by the Conditional Value at Risk (CVaR) measure.
The multistage formulation overcomes the myopic view of the static models considering a longer time horizon
and provides a more flexible paradigm where the initial strategy can be revised to account for changed market
conditions. The proposed formulation presents a bi-objective function, where the two conflicting criteria
wealth maximization and risk minimization, are jointly accounted for by properly choosing the weight to
attribute to the two terms. The model is encapsulated within a rolling horizon scheme and solved iteratively
exploiting each time the more update information in the generation of the scenario tree. The preliminary
computational experiments carried out by considering as benchmark the Italian index FSTE-MIB seem to be
promising and show that, on an out-of-sample analysis, the tracking portfolios follow the benchmark very
closely, overcoming it on the long run.
1 INTRODUCTION
Index tracking (IT) is an investment strategy aimed
at replicating the performance of a given financial in-
dex taken as benchmark over a given time horizon.
When the portfolio composition mirrors exactly the
index one, i.e. all of the assets that make up the in-
dex are purchased in the same proportion as in the
index, the investment strategy is called “full replica-
tion”. Even though such a strategy would ensure a
perfect match of the index behaviour, the main disad-
vantage is related to the presence of high transaction
costs associated with the purchase and sale of securi-
ties. Indeed, the weights for each asset composing the
index are typically based on market capitalization and
as soon as the prices of the assets change, the weights
are modified as well. “Partial replication” can be seen
as an alternative approach for index tracking where
only a subset of assets composing the index is prop-
erly selected with the aim of minimizing the tracking
error.
The IT problem has been attracting a growing in-
terest in the scientific community as witnessed by
the large number of contributions that is sill increas-
ing in the last years. Interested readers are referred,
for example, to (Sant”Anna et al., 2017) for a re-
cent overview on the relevant literature. Most of the
proposed formulations are static models relying on a
backward perspective. The tracking portfolio is built
so to minimize a tracking error that measures the dif-
ference between the historical performance of the de-
fined portfolio and the index. The basic idea is that
higher tracking accuracy in the past is a “guarantee”
for the future. Based on the specific tracking error
function used, different formulations have been pro-
posed. For example, the variance of the difference be-
tween the benchmark and the tracking portfolios has
been considered in (Corielli and Marcellino, 2006).
The mean absolute deviation (MAD) has been used as
dispersion measure in (Kim et al., 2005) and (Konno
and Yamazaki, 1991), to name a few. The downside
mean deviation, that focuses on the negative side of
the tracking error, appears in (Angelelli et al., 2008),
(Ogryczak and Ruszczy’nski, 1999). Quantile mea-
sures have been used for example in (Ogryczak and
Ruszcz’nski, 2012).
Unlike a backward view, a forward perspective in
static models has been seldom adopted. This new
view changes the nature of the problem, that can not
be considered deterministic any more. Indeed, the
future performance of the index and its components
are not known when the tracking portfolio should
Beraldi, P., Violi, A., Bruni, M. and Carrozzino, G.
Dynamic Index Tracking via Stochastic Programming.
DOI: 10.5220/0007573404430450
In Proceedings of the 8th International Conference on Operations Research and Enterprise Systems (ICORES 2019), pages 443-450
ISBN: 978-989-758-352-0
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
443

be defined. Following the classical stochastic pro-
gramming framework (Birge and Louveaux, 2013;
Ruszczy
ˇ
nski and Shapiro, 2003), uncertain parame-
ters can be dealt as random variables defined on a
given probability space and under the assumption of
discrete distribution, they can be represented in terms
of scenarios, each occurring with a given probability
value. A scenario based approach for the IT problem
was proposed by (Consiglio and Zenios, 2001) where
the tracking error is represented in terms of the MAD.
More recently, (Beraldi and Bruni, 2018) addressed
the IT problem by the chance constrained paradigm
(both in the basic and integrated form). Both the back-
ward and the forward perspectives described so far are
defined in a static setting. Once selected, the portfolio
is not rebalanced during the considered time horizon
in the hope that the future behaviour will be close to
the desired one. In a dynamic setting, the portfolio
composition can be revised from time to time accord-
ing to new market information, if the tracking accu-
racy starts to deteriorate. Dynamic index tracking has
been mainly addressed in a deterministic setting. For
example, in (Gaivoronski et al., 2005) the authors pro-
posed several dynamic formulations differing for the
adopted tracking measures. Very recently, Strub and
Baumann addressed in (Strub and Baumann, 2018)
the problem of the optimal construction and rebalanc-
ing of index tracking portfolios. They proposed and
compared different deterministic formulations for re-
balancing that are iteratively solved within a rolling
horizon scheme. A multi-objective evolutionary al-
gorithm has been proposed in (Chiam et al., 2013)
and applied for both the single-period and the multi-
period index tracking problem.
When the dynamic and the stochastic elements are
jointly addressed, the problem becomes even more
challenging. However, only a few number of contri-
butions deal with this more involved case. A two-
stage stochastic programming formulation has been
proposed in (Stoyan and Kwon, 2010). The model
aims at minimizing the MAD risk measure and in-
cludes some real features. The multi-stage paradigm
has been adopted in (Barro and Canestrelli, 2009),
where the authors focus on tracking error measures
and consider as objective function the weighted sum
of a first term accounting for the deviation from the
benchmark and a second penalty term accounting for
the portfolio turnover. Local volatility and tail risk are
both controlled in the stochastic formulation proposed
in (Barro et al., 2018).
In this paper, we propose a multistage-stochastic
programming model where tracking accuracy is con-
trolled by the Conditional Value at Risk (Rockafellar
and Uryasev, 2000). While the Value at Risk (VaR)
measures the maximum potential loss that can be ex-
perienced with a given confidence level, the CVaR al-
lows to control the tail risk, determining the expected
value of the losses exceeding the VaR. The relevance
of the CVaR is mainly related to the theoretical prop-
erties it satisfies. It is a “coherent” risk measure and
is consistent with the second degree stochastic dom-
inance. From a practical viewpoint, the CVaR is a
downside risk measure in the sense that it does not
penalize the deviations above a given target, typically
perceived as profit. Moreover, the CVaR is appealing
from a computational viewpoint since it admits, in the
case of discrete distributions, a linear programming
reformulation. When the CVaR is embedded within
a multistage model, the problem becomes more diffi-
cult to deal with since the time-consistency property
should be properly accounted for. Roughly speaking,
this property asserts that, at every state, optimality of
our decisions should not depend on scenarios that we
already know cannot happen in the future (de Mello
and Pagnoncelli, 2016). Starting from the stage-wise
risk measures properly defined, we build an aggre-
gated measure. It represents the first criteria to op-
timize together with the expected wealth. The con-
flicting nature of the two criteria is accounted by con-
sidering a bi-objective function where their relative
importance is weighted by the choice of a parameter
λ between [0, 1].
The rest of the paper is organized as follows. Sec-
tion 2 introduces the multistage stochastic program-
ming formulation. It is embedded into a rolling hori-
zon scheme, as detailed in Section 3. Section 4 reports
on the computational experiments carried out to eval-
uate the performance of the proposed strategy also on
the basis of an out of sample analysis. Conclusions an
future research directions are discussed in Section 5.
2 MODEL FORMULATION
We consider the problem of a fund manager who
wants to determine a portfolio that tracks a benchmark
(market index) over a given time horizon composed
of t ∈ T = {1, . . . , T } discrete time periods. Once ini-
tially composed, the portfolio can be rebalanced (by
buying and/or selling some assets) in response to new
market information.
We denote by {τ
t
}
t∈T
and {ξ
t
}
t∈T
, the random
evolution of the market index and the price of the dif-
ferent composing assets. Thus, for every t, ξ
t
is a
random vector of size |J|, where J denotes the set of
assets. Under the assumption of discrete random vari-
ables, the information structure can be described by
a scenario tree where, at each stage t ∈ T , there is a
ICORES 2019 - 8th International Conference on Operations Research and Enterprise Systems
444

discrete number of nodes N
t
, referring to a specific
realization of the uncertain parameters. There are T
levels (stages) in the tree, corresponding to specific
time periods. The nodes at final stage N
T
are called
leaves. The set N
0
is composed of a unique node,
i.e. the root. Each node at stage t, except the root,
is connected to a unique node at stage t − 1, which
is called ancestor a(n) and to a set of nodes at stage
t + 1, called successors, denoted by c(n). Leaf nodes
have no successors and identify the scenarios, each
one represented by a path from the root to a leaf, de-
noted P (n). Let π
a(n),n
denote the probability of tran-
sition to node n from its ancestor a(n). The sum of the
probabilities associated to the arcs leaving each node
sum up to 1. Starting from these values, the proba-
bility associated with each node n denoted by p
n
can
be easily determined as the product of the transition
probabilities. The following notation is used. For
each asset j and node n, let x
jn
, b
jn
and s
jn
denote
the amount of asset j hold, bought and sold at node
n, respectively. Moreover, the possibility of investing
in a riskless asset (liquidity component) that guaran-
tees a given interest, at a rate r
f
is also considered by
means of variable v
n
. Portfolio should be composed
and managed in such a way to satisfy the following
set of constraints:
x
j0
= ¯x
j
+ b
j0
− s
j0
∀ j ∈ J (1)
x
jn
= x
ja(n)
+ b
jn
− s
jn
∀ j ∈ J ∀n ∈ N − {0}
(2)
(1 − t
c
)
∑
j∈J
ξ
j0
s
j0
+C = (1 +t
c
)
∑
j∈J
ξ
j0
b
j0
+ v
0
(3)
(1 −t
c
)
∑
j∈J
ξ
jn
s
jn
+ (1 + r
f
)v
a(n)
=
(1 +t
c
)
∑
j∈J
ξ
jn
b
jn
+ v
n
∀n ∈ N − {0} (4)
Constraints (1)-(2) are classical balance constraints.
In the case of the root node, ¯x
j
denotes the initial hold-
ing in asset j, if any. Constraints (3)-(4) are monetary
balance constraints. Here t
c
denotes the transaction
costs that are assumed to be proportional to the mon-
etary value that is traded. At the initial time, a capital
denoted by C is assumed to be invested. The port-
folio is initially composed and eventually revised in
the subsequent periods with the aim of taking into ac-
count both the expected tracking portfolio value and
the risk, measured in terms CVaR. For a given confi-
dence level α (eventually depending on the stage t),
the CVaR is defined as the expected loss exceeding
the VaR:
IE[L|L ≥ VaR]
In our approach, the loss associated with each node
n of the scenario tree is computed with the respect to
the benchmark, i.e. L
n
= max(0, K
n
−W
n
), where W
n
represents the value of the tracking portfolio at node n
computed as W
n
=
∑
j∈J
ξ
in
x
in
+v
n
and K
n
is the value
of the initial capital C compounded by considering the
interest rates generated by the market index. Thus,
K
n
=
∏
m∈P (n)−{0}
(1 + τ
m
) ∗C, where τ
m
denotes the
rate of return of the market index at nodes m belong-
ing to the path connecting the root with node n. While
in the two stage model, the definition of the CVaR is
straightforward, in the multiperiod setting it deserves
some additional explanation. To simplify the expo-
sition, we include additional supporting variables de-
noted by CVaR
n
and CVaRt. For each stage t, the
CVaRt is computed and then the staged values are
properly aggregated. At the second stage, i.e. t = 2,
the CVaRt
2
can be easily computed by adopting the
classical formula for discrete distributions:
CVaRt
2
= η +
1
(1 − α)
∑
n∈N
2
p
n
max(0, L
n
− η) (5)
where η denotes the VaR and the max(0, L
n
− η) ac-
counts for the losses exceeding the VaR. This latter
term can be linearized by adding for each node n a
supporting non negative variable δ
n
≥ L
n
−η. At later
stages, the CVaRt is determined by considering the
expected risk measures associated with the nodes of
that level, but taking into their “past history”. For ex-
ample for t = 3,
CVaRt
3
=
∑
n∈N
2
p
n
∗CVaR
n
(6)
where for each n, CVaR
n
is computed by considering
the successors of n and it is defined as
CVaR
n
= η
n
+
1
(1 − α)
∑
m∈N
3
|m∈c(n)
π
nm
max(0, L
m
−η
n
).
(7)
The different stage-wise measures are then aggre-
gated attributing a weight at the different stages (as-
sumed equal in our approach). Although the ultimate
objective is the minimization of the risk component
aimed at controlling the tracking accuracy, the deci-
sion maker is typically also concerned about the max-
imization of the expected wealth accumulated at the
different time periods that may generate an excess of
return over the benchmark. With the aim of taking
both the elements into account, the proposed formu-
lation considers a bi-objective function:
minz = λ (
1
(T − 1)
T
∑
t=2
CVaR
t
) −
(1 − λ)(
1
(T − 1)
T
∑
t=2
∑
n∈N
t
p
n
W
n
). (8)
Dynamic Index Tracking via Stochastic Programming
445

Here the parameter λ can be interpreted as a risk aver-
sion level as it determines how much weight is given
to minimize risk as opposed to maximize the wealth.
The extreme case of λ = 0 corresponds to the risk neu-
tral case, whereas the higher the λ the greater the im-
portance attributed to risk. The formulation is com-
pleted with the additional supporting variables L
n
and
δ
n
used to account for the max operator. Finally, the
model includes a diversification constraint that limits
the monetary amount invested in every asset:
ξ
jn
x
jn
≤ θW
n
∀ j ∈ J, ∀n ∈ N (9)
where θ is a user defined parameter. The overall
model belongs to the class of multistage stochastic
programming linear problems where the non antici-
pativity constraints are implicitly included (node for-
mulation). Depending on the number of time stages
and scenarios the computational effort can become
extremely high calling for the use of solution ap-
proaches exploiting the specific problem structure.
For the computational experiments presented here-
after the solution time is still affordable by using off-
of-the-shelves software. The design of specialized
methods is the subject of ongoing research.
3 EXPERIMENTAL DESIGN
The proposed formulation is embedded into a rolling
horizon scheme and is solved periodically over the in-
vestment horizon using each time more updated infor-
mation. Even though the use of the rolling approach is
not new in the portfolio optimization context (see, for
example, (Beraldi et al., 2011)), most contributions
for the IT problem consider one period models as in
(Strub and Baumann, 2018). The multistage formula-
tion overcomes the myopic view of these static mod-
els considering a longer time horizon and provides a
more flexible paradigm where the initial strategy can
be revised to account for changed market conditions.
In the proposed experimental design, we consider
a long time horizon starting from a fixed period in the
past denoted by T
0
and ending at period T
F
. The plan-
ning horizon is divided into two sets: the first set from
T
0
to T
S
is used as “historical source” to determine all
the data required for scenario generation, the second,
lasting at T
F
is used as investment horizon where the
tracking accuracy is evaluated. The following Figure
1 shows the scheme.
The proposed formulation is solved iteratively
starting from period T
S
. Once defined the optimal in-
vestment strategy, the decisions referring to the cur-
rent time (first stage decisions associated with the root
node of the scenario tree) are implemented. As time
Figure 1: Rolling Horizon process.
progresses, at each subsequent periods the tracking
portfolio can be rebalanced. The multistage model
is solved again using an updated scenario tree rede-
fined using an update set of historical data that also
includes the new information that has been revealed.
The flowchart 2 reported below illustrates the rolling
approach.
Once time index is increased, the parameters
should be updated as follows:
• ¯x
j
= x
j0
, ∀ j ∈ J
• C = v
0
(1 + r
f
).
4 COMPUTATIONAL RESULTS
This section is devoted to the presentation and dis-
cussion of the computational experiments carried out
with the aim of assessing the performance of the pro-
posed stochastic programming formulation. The im-
plemented code integrates MATLAB R2015b
1
for the
scenario generation and parameters update phases and
GAMS 24.7.4
2
as algebraic modeling system, with
CPLEX 12.6.1
3
as solver for the linear programming
1
www.mathworks.com
2
www.gams.com
3
https://www.ibm.com/analytics/cplex-optimizer
ICORES 2019 - 8th International Conference on Operations Research and Enterprise Systems
446
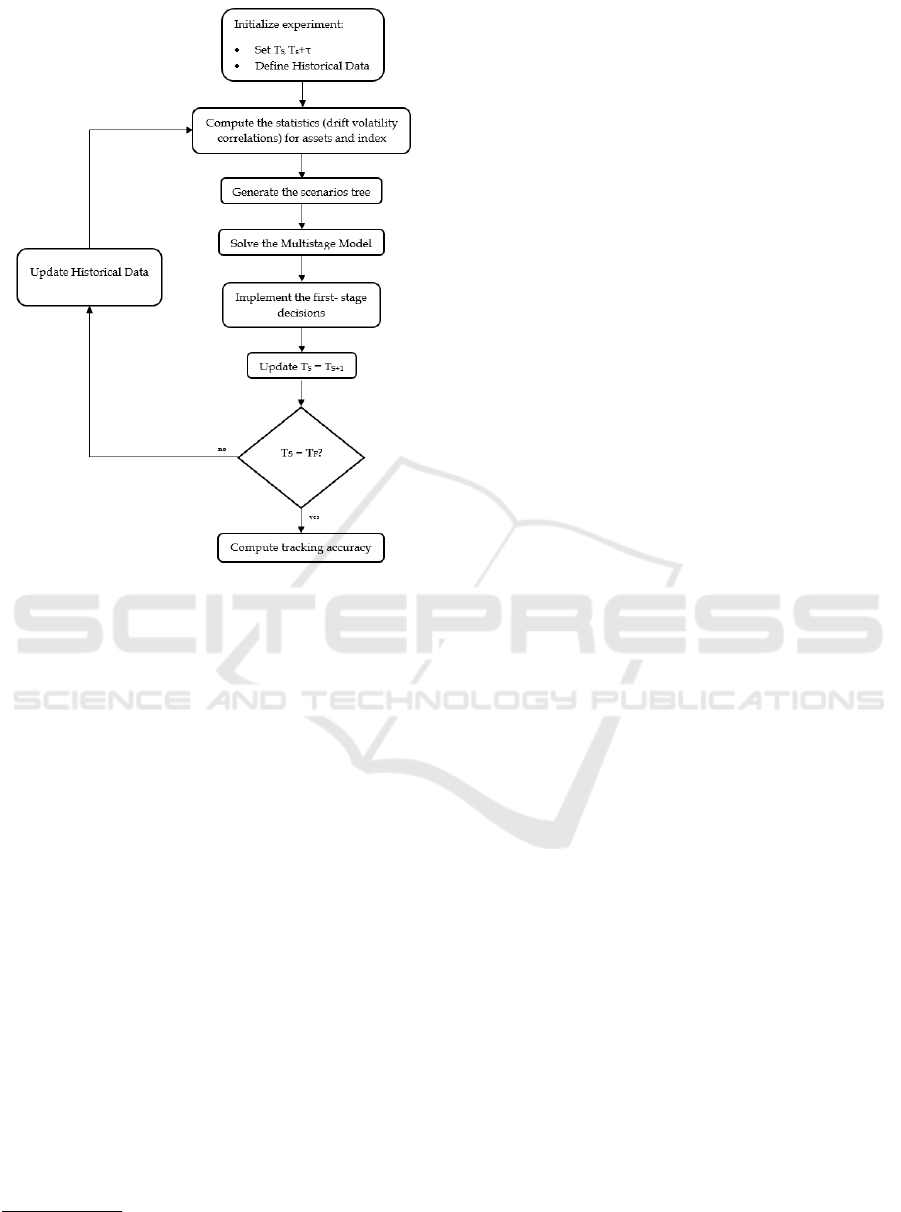
Figure 2: Flowchart of the rolling approach.
models. All the test cases have been solved on a PC
Intel Core I7 (2.5 GHz) with 8 GB of RAM DDR3.
As benchmark we have considered the FTSE-
MIB
4
, that is the primary market Index for the Ital-
ian equity markets, capturing approximately 80% of
the domestic market capitalization. FTSE- MIB mea-
sures the performance of 40 Italian equities and seeks
to replicate the broad sector weights of the Italian
stock market.
Moreover, for all the test cases we have considered
a planning horizon of one month with weekly time
stages, an initial cash of e10,000,000, the possibil-
ity to invest in a risk-free asset with an annual return
of 2% and an upper bound to the amount invested in
each asset equal to 5% of the entire portfolio wealth.
As regards the confidence level for the CVaR calcula-
tion we have considered a value of 90%.
Historical data of weekly prices have been col-
lected for the benchmark and the underlying assets
starting from April 2015 to April 2017. Such val-
ues have been used to compute the drift, volatility and
correlation coefficients used to generate the scenario
tree by a Monte Carlo simulation technique assuming
a correlated Brownian motion (Beraldi et al., 2010),
(Beraldi and Bruni, 2013). Each time a scenario tree
4
https://www.borsaitaliana.it/borsa/indici/indici-in-
continua/dettaglio.html?indexCode=FTSEMIB
is generated within the rolling horizon scheme, more
updated information are used, discarding the oldest
data and adding the new revealed values. The results
reported hereafter refer to a scenario tree with four
stages and 200 scenarios. The designed tree consid-
ers a branching factor decreasing with the time stages.
Several tests have been carried out with the aim of
assessing the performance of the proposed approach
and of gaining managerial insights useful to support
the decision maker in the financial planning process.
The first set of experiments have been carried out to
evaluate the impact of the risk aversion on the perfor-
mance of the tracking portfolios. The model has been
tested for different values of the parameter λ between
[0, 1]. The results in terms of expected wealth and risk
are shown in Figure 3 that depicts the efficient fron-
tier, i.e. the set of “non-dominated” portfolios.
As expected, a conservative attitude, represented
by a high value of λ, provides less profitable solu-
tions carrying, on the other side, lower risk. A more
aggressive behaviour (low values of λ) leads to the
definition of portfolios with higher expected wealth
that can be exposed to higher losses. By varying λ,
the decision maker can determine different portfolios
to choose from also according to his/her risk attitude
and contingent market conditions.
Another set of experiments has been devoted to
validate the effectiveness of the proposed approach
in a real-life setting by means of an “out-of-sample”
analysis. We have considered a time horizon of 10
weeks and evaluated the provided solutions on the
data really observed from pril to June 2017. First of
all, we have analyzed the behaviour of solutions ob-
tained with the proposed model (SP) for three differ-
ent values of λ (0, 0.5 and 1) and compared these port-
folios with the benchmark under the independence as-
sumption. The following Figure 4 reports the cumu-
lative returns evaluated over the out of sample hori-
zon. The results clearly show that, irrespective of the
choice of the λ values, the generated portfolios track
very closely the benchmark, overcoming it in the long
run. The best performance seems to be achieved for
a λ value equal to 1, thus when a higher risk aversion
is taken into account. In this case, for all but two pe-
riods, higher cumulative returns are guaranteed when
the investment strategy is applied on real data.
Other experiments have been carried out to evalu-
ate to what extent the rolling approach impacts on the
performance of the investment strategy when tested
on an out of sample analysis. To this aim, we
have compared the results obtained with and without
rolling. In this last case, the initial portfolio obtained
by solving the multistage model and associated with
the root node of the scenario tree is kept for all the
Dynamic Index Tracking via Stochastic Programming
447
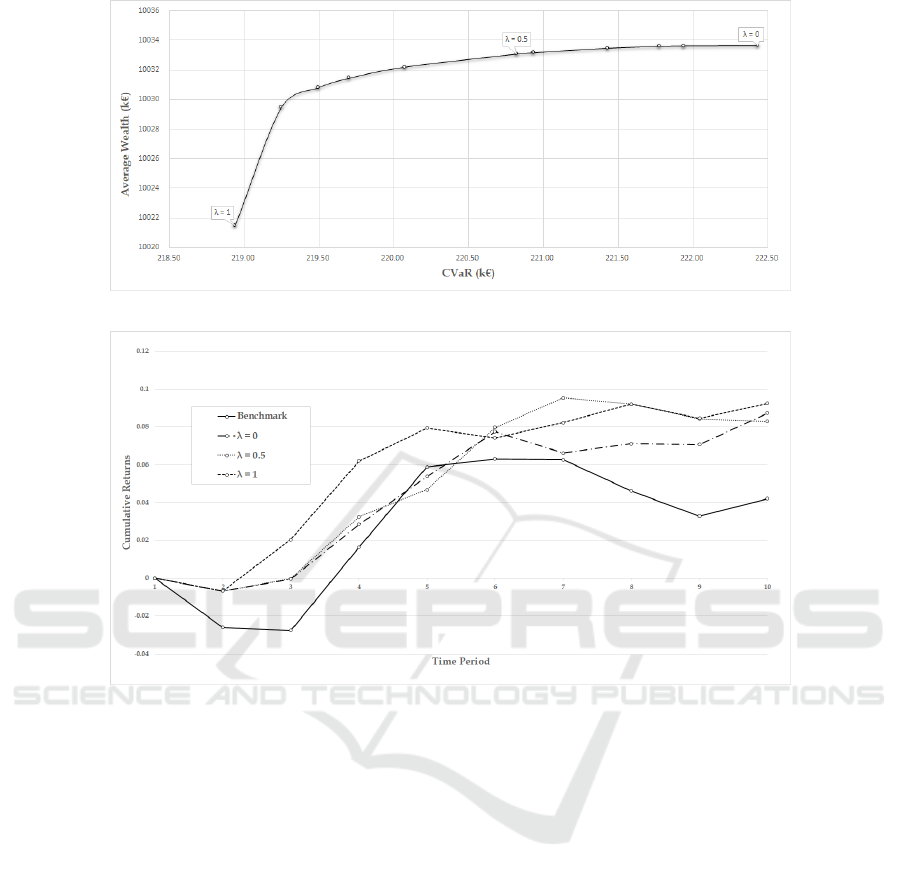
Figure 3: Efficient frontier.
Figure 4: Cumulative returns for the SP portfolios and the benchmark as function of λ.
investment horizon and is not revised any more. The
following Figure 5 reports the cumulative returns ob-
tained for a medium risk-aversion level (λ= 0.5). The
results clearly show the superiority of the rolling ap-
proach that is related to a major flexibility to revise the
portfolio in response to changes in the market condi-
tion. Looking at the Figure, it emerges that, the strate-
gies behave very similarly in the first two periods, but
as soon the benchmark modifies its trend, a revision
of the portfolio is required to maintain a high tracking
accuracy.
The better performance of the rolling approach
comes at the price of an increased computational ef-
fort required by the iterated solution of the multistage
problem that is already difficult to solve. A good com-
promise could be to avoid to execute the revision of
the portfolio at regular intervals, but trigger it on the
basis of pre-defined criteria, such large changes of the
market conditions. The definition of event-triggered
rebalancing would represent a more flexible alterna-
tive to focus on.
5 CONCLUSIONS
The paper deals with the index tracking problem and
proposes a multistage stochastic programming formu-
lation where the tracking accuracy is controlled by the
Conditional Value at Risk measure. With the respect
to the static models, the proposed approach, looking
at a longer horizon and explicitly accounting for un-
certainty, guarantees the definition of more flexible
investment strategies that could be revised to account
for changed market conditions. A bi-objective func-
tion, merging the two conflicting criteria of wealth
maximization and risk minimization, is designed with
the aim of providing the decision maker with different
investment solutions to evaluate by considering differ-
ent levels of risk aversion. The model is encapsulated
within a rolling horizon scheme and solved iteratively
exploiting each time the more update information in
the generation of the scenario tree. The computa-
tional experiments have been carried out by consid-
ering as benchmark the Italian index FSTE-MIB. An
ICORES 2019 - 8th International Conference on Operations Research and Enterprise Systems
448
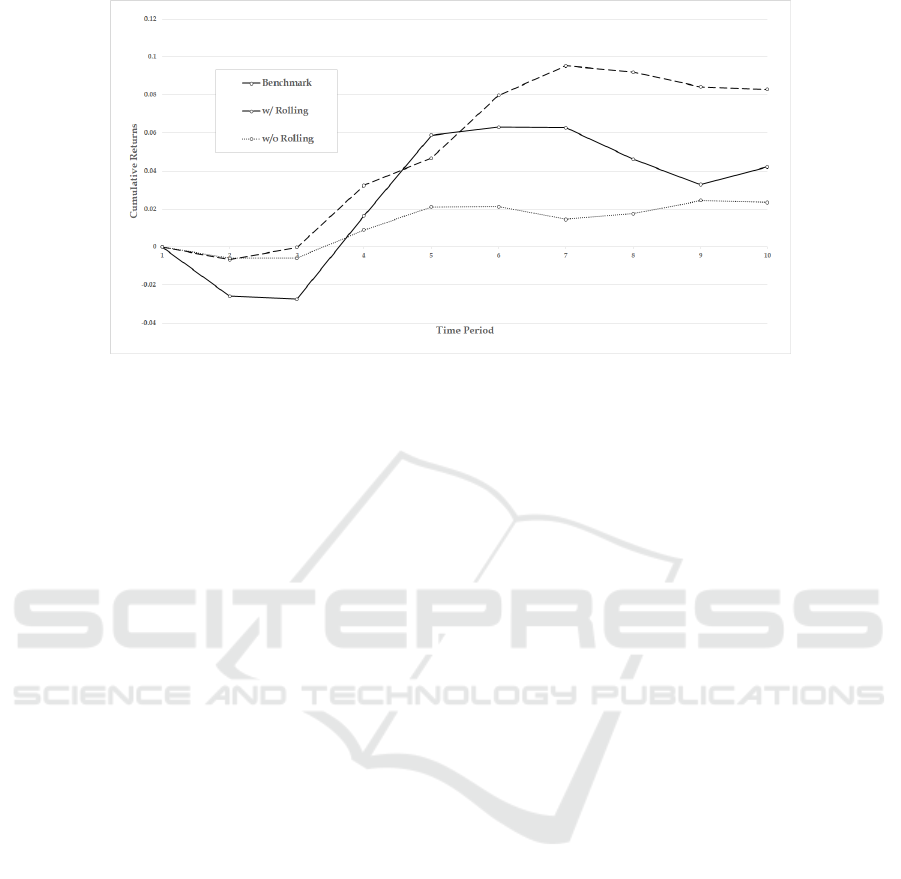
Figure 5: Cumulative returns with and without the rolling approach for λ = 0.5).
out-of-sample analysis has been performed to evalu-
ate the behaviour of the proposed approach when ap-
plied on a real setting. The preliminary results show
that the tracking portfolios are able to replicate (and
even beat) the benchmark on the long run and em-
phasize the importance of adopting a rolling horizon
approach to guarantee high accuracy levels.
REFERENCES
Angelelli, E., Mansini, R., and Speranza, M. G. (2008). A
comparison of mad and cvar models with real features.
Journal of Banking & Finance, 32(7):1188–1197.
Barro, D. and Canestrelli, E. (2009). Tracking error: A
multistage portfolio model. Annals of Operations Re-
search, 165(1):47–66.
Barro, D., Canestrelli, E., and Consigli, G. (2018). Volatil-
ity versus downside risk: performance protection in
dynamic portfolio strategies. Computational Manage-
ment Science, in press:1–47.
Beraldi, P. and Bruni, M. (2013). A clustering approach for
scenario tree reduction: An application to a stochastic
programming portfolio optimization problem. TOP,
22(3):1–16.
Beraldi, P. and Bruni, M. (2018). Enchanced indiexation via
chance constraints. Technical Report - FERM Labo-
ratory.
Beraldi, P., Simone, F. D., and Violi, A. (2010). Generat-
ing scenario trees: A parallel integrated simulation-
optimization approac. Journal of Computational and
Applied Mathematics, 233(9):2322–2331.
Beraldi, P., Violi, A., and Simone, F. D. (2011). A decision
support system for strategic asset allocation. Decision
Support Systems, 51(3):549–561.
Birge, J. and Louveaux, F. (2013). Introduction to Stochas-
tic Programming. Springer, New York.
Chiam, S., Kan, K., and Mamun, A. A. (2013). Dynamic
index tracking via multi-objective evolutionary algo-
rithm. Applied Soft Computing, 13(7):3392 – 3408.
Consiglio, A. and Zenios, S. A. (2001). Integrated simu-
lation and optimization models for tracking interna-
tional fixed income indices. Mathematical Program-
ming, 89(2):311–339.
Corielli, F. and Marcellino, M. (2006). Factor based
index tracking. Journal of Banking and Finance,
30(8):2215–2233.
de Mello, T. H. and Pagnoncelli, B. K. (2016). Risk aver-
sion in multistage stochastic programming: A model-
ing and algorithmic perspective. European Journal of
Operational Research, 249(1):188 – 199.
Gaivoronski, A. A., Krylov, S., and Wijst, N. V. D. (2005).
Optimal portfolio selection and dynamic benchmark
tracking. European Journal of Operational Research,
163(1):115–131.
Kim, A., Kim, Y. C., and Shin, K. Y. (2005). An algo-
rithm for portfolio optimization problem. Informatica,
16(1):93–106.
Konno, H. and Yamazaki, H. (1991). Mean-absolute de-
viation portfolio optimization model and its applica-
tions to tokyo stock market. Management science,
37(5):519–531.
Ogryczak, W. and Ruszczy’nski, A. (1999). From stochas-
tic dominance to mean-risk models: Semideviations
as risk measures. European Journal of Operational
Research, 116(1):35–50.
Ogryczak, W. and Ruszczy’nski, A. (2012). Dual stochastic
dominance and quantile risk measuress. International
Transactions in Operational Research, 9(5):661–680.
Rockafellar, R. and Uryasev, S. (2000). Optimization of
conditional value-at-risk. Journal of Risk, 2:21–41.
Ruszczy
ˇ
nski, A. and Shapiro, A. (2003). Stochastic Pro-
gramming, Handbook in Operations Research and
Management Science. Elsevier Science, Amsterdam.
Sant”Anna, L. R., Filomena, T. P., Guedes, P. C., and
Borenstein, D. (2017). Index tracking with controlled
number of assets using a hybrid heuristic combining
Dynamic Index Tracking via Stochastic Programming
449

genetic algorithm and non-linear programming. An-
nals of Operations Research, 258(2):849–867.
Stoyan, S. J. and Kwon, R. H. (2010). A two-stage stochas-
tic mixed-integer programming approach to the in-
dex tracking problem. Optimization and Engineering,
11(2):247–275.
Strub, O. and Baumann, P. (2018). Optimal construction
and rebalancing of index-tracking portfolios. Euro-
pean Journal of Operational Research, 264(1):370 –
387.
ICORES 2019 - 8th International Conference on Operations Research and Enterprise Systems
450
