
End-to-end Learning Approach for Autonomous Driving: A
Convolutional Neural Network Model
Yaqin Wang, Dongfang Liu, Hyewon Jeon, Zhiwei Chu and Eric T. Matson
Department of Computer and Information Technology, Purdue University, U.S.A.
Keywords:
Autonomous Driving, AI, Convolutional Neural Network, End-to-end Approach.
Abstract:
End-to-end approach is one of the frequently used approaches for the autonomous driving system. In this
study, we adopt the end-to-end approach because this approach has been approved to lead to a distinguished
performance with a simpler system. We build a convolutional neural network (CNN) to map raw pixels from
cameras of three different angles and to generate steering commands to drive a car in the Udacity simulator.
Our proposed model has a promising result, which is more accurate and has lower loss rate comparing to
previous models.
1 INTRODUCTION
In 1989, (Pomerleua, 1989) designed a simple struc-
tured neural network with three fully-connected lay-
ers to steer a car on the CMU campus. This was an
initial research to demonstrate that machine learning
theory can be implemented to generate commands to
guide a car. However, until now, no autonomous cars
have been designed which meet the full autonomous
driving (R
¨
odel et al., 2014). As the most important
component in autonomous driving, different models
based on different approaches have been used to gen-
erate appropriate commands to steer the car. Progress
of autonomous driving is due to the optimization of
the model design.
Currently, the mediated perception approach and
end-to-end approach are two frequently used ap-
proaches for autonomous driving system. Mediated
perception approach is widely used in the car industry
which requires a large assistive system (lidar, radar,
sensor, and central computing systems) for detection,
prediction, and decision making (Chen et al., 2015).
On the contrary, the end-to-end approach is a much
lighter system and utilizes a distinct theory to steer
a car (Bojarski et al., 2016)(Xu et al., 2017)(Codev-
illa et al., 2018)(Pfeiffer et al., 2017). This approach
focuses on building an artificial intelligence model
which emulates humans driving. For human, driv-
ing on the road, steering commands are constantly
made based on the instant processing of images (Bo-
jarski et al., 2016)(Xu et al., 2017)(Codevilla et al.,
2018)(Pfeiffer et al., 2017). For an end-to-end learn-
ing approach, the model is normally trained by learn-
ing the humans actions on the road (Bojarski et al.,
2016)(Xu et al., 2017)(Codevilla et al., 2018)(Pfeif-
fer et al., 2017). Here, one end is reading the input
image and another end is to respond accordingly to
road conditions. Using end-to-end learning approach
is easy to maneuver and cost-effective compared to
mediated perception approach.
Prior research has explored the end-to-end learn-
ing approach for autonomous driving. A pioneering
study is from (Muller et al., 2006) who utilized an
end-to-end learning system to design an autonomous
car. (Muller et al., 2006) used a six-layer convo-
lutional neural network for image processing. This
CNN model can process the raw pixels and com-
mand steering angels based on the input image. In
addition, (Chen et al., 2015) employed the Caffe
framework to develop a CNN model to process the
dataset from TORCS (The Open Racing Car Sim-
ulator). The model has a higher computing speed
compared to the model from (Muller et al., 2006)
when making commands for steering actions. An-
other distinguished end-to-end learning model is from
(Su et al., 2017). To improve the generalization of
their model, (Su et al., 2017) employed a large dataset
for training, which included different road conditions.
The outcomes of this research obtained a high ac-
curacy pertaining to steering angels compared to its
previous counterparts. CNN models have also been
widely used in object detection and classification in
autonomous driving (Ren et al., 2015)(Girshick et al.,
2014).
Wang, Y., Liu, D., Jeon, H., Chu, Z. and Matson, E.
End-to-end Learning Approach for Autonomous Driving: A Convolutional Neural Network Model.
DOI: 10.5220/0007575908330839
In Proceedings of the 11th International Conference on Agents and Artificial Intelligence (ICAART 2019), pages 833-839
ISBN: 978-989-758-350-6
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
833

Aside from the seminal studies discussed above,
a widely recognized research is from (Bojarski et al.,
2016). The researchers proposed an innovative CNN
model based on the end-to-end learning approach.
The strength of this research is that the CNN model
has a much simpler structure compared to the previ-
ous studies. It only has nine layers of networks with
five convolutional layers and four fully-connected
layers. Hence, the computing speed for this model
is faster which can process 30 frame per second. In
addition, this model does not require a large dataset
for training. The total training dataset for this model
only included 100 hours of video clips of different
road conditions.
Although the previous research has obtained var-
ious achievements for end-to-end learning approach,
we identified a number of problems in the process of
survey studies of previous research. First, the ma-
jority of the previous end-to-end learning approach is
based on the CNN model for image processing. CNN
is an effective neural framework to process image, but
it is also subject to the problems of overfitting and
vanishing gradient in the training phase (Srivastava
et al., 2014)(Ma et al., 2017)(Klein et al., 2018)(Su
et al., 2017). Second, a desirable outcome of the
end-to-end learning approach is that the autonomous
car can emulate the humans driving and keep on the
road with limited human interventions. However,
most autonomous cars based on the end-to-end learn-
ing approach need a large number of human inter-
ventions in previous research (Pomerleua, 1989)(Xu
et al., 2017)(Muller et al., 2006)(Chen et al., 2015).
The contributions of this study are in three folds.
First, we design a CNN model based on end-to-end
learning approaches which has better generalization
than that of (Bojarski et al., 2016). We will discuss
more details in the proposed model section pertaining
to how we improve the noise robustness of our model.
This goal is evaluated by testing the generalization of
our proposed model. We evaluate the loss rate and ac-
curacy of our model during the training and address
the potential problem of overfitting and vanish gra-
dient. Second, our proposed CNN model based on
end-to-end learning approach can steer a car longer
than the reported time from (Bojarski et al., 2016).
We compare the results and report them in the result
and discussion section.
The rest of this report is organized as follows: In
section 2, the required materials and the proposed
methods will be introduced; In section 3, we will
present the results and discussions about our project;
In section 4, we will conclude the progress of our on-
going project and offer some insights for the future
work.
2 METHODOLOGY
2.1 Simulator
There is a large array of autonomous driving simu-
lators available on GitHub, as seen in Table 1. The
selection criteria for our project are that: 1. The sim-
ulator does not have a high requirement for graphics
device; 2. The simulator can easily collect image data
and generate CSV file which includes labeling infor-
mation for the collected images; 3. The simulator can
be installed and operated on Mac OS X; 4. The simu-
lator has an autonomous driving mode to test the au-
tonomous model.
We finally decide to use Udacitys Self-Driving
simulator, because it fits well with our selection stan-
dards. This simulator platform has high graphics re-
quirements and it can be easily installed on Mac OS. It
has training mode and autonomous mode. In training
mode, the simulator can record images and generate
a CSV file simultaneously when we drive a car in its
environment. In autonomous mode, we can utilize the
designed model to programmatically navigate the car
in the environment.
2.2 Data Collection
The data collection is iterative and has two phases.
In the first phase, we focused on practicing the driv-
ing skills. After the Udacity Self-Driving simulator is
installed, we started to use training mode to practice
the driving skills. We constantly evaluated our per-
formance of driving in the simulator and improve the
driving accuracy pertaining to keeping the car in the
middle of the lane. The first phase lasted about one
month before we started collecting data for training.
In the second phase, we made strict rubrics for the
collection process which determine the usability of
the collected data. The usable data only includes im-
ages that the car is running inside of two-lane marks
and the car does not suffer from drastic steering an-
gle changes. Data which fails to meet the rubrics is
not included in the final dataset for training. Figure 1
demonstrates the real data collection process, which
simultaneously recorded the left, center, and right pic-
ture of a running car in training mode. A CSV file is
also automatically generated while we run the car in
Udacity. A sample CSV file includes information of
labels of center, left, and right pictures as well as a
cars current steering angle, accelerating, reserve, and
speed, as seen in Figure 2. The second phase of data
collection lasted around one month, we run a car for
approximately sixty hours on Udacity and we finally
decided to include 83,424 pictures for model training.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
834

Table 1: Summary of the autonomous driving simulators.
Name Graphic require-
ment
Data collection OS requirements (Mainly sup-
port)
Autonomous driving
mode
Udacity low easy Window, Mac OS, Linux Yes
TORCS medium complex Linux Yes
Euro Truck Simulator 2 high complex Window, Mac OS, Linux Yes
Gazebo medium complex Linux Yes
CARLA high complex Window, Linux Yes
a b
c
Figure 1: Left (a), center (b), and right (c) camera of a running car.
2.3 Method
In this study, we build a convolutional neural network
(CNN) to map raw pixels from cameras of three dif-
ferent angles which generate steering and acceleration
commands to drive a car in the Udacity simulator. The
overall framework for this research is demonstrated
in Figure 3. An end-to-end approach is employed be-
cause this approach has been approved to lead to a dis-
tinguished performance with a simpler system (Bo-
jarski et al., 2016). A distinguished performance can
be achieved because the end-to-end learning system is
trying to emulate humans action, instead of learning
human-selected criteria, such as lane detection or lane
keeping. In addition, a simpler solution is defined
by the fact that an end-to-end system only requires a
small number of datasets for training (Bojarski et al.,
2016). Theoretically, if the training dataset only in-
cludes the actions we want the model to learn, an end-
to-end learning system is able to achieve a productive
outcome with less effort for training. With the road
images associated with steering angles and accelera-
tion as the training inputs, our system automatically
learns internal representations of the imperative pro-
cessing steps pertaining to making proper commands
for driving. We do not need to explicitly train our
model to detect road features, for instance, the outline
of roads or background objects. Our model is able to
make command to change steering angles and accel-
eration when encountering similar road condition.
2.4 The Proposed Model
In this study, we rely on the framework from (Bojarski
et al., 2016) to build our model. The study from (Bo-
jarski et al., 2016) is the widely recognized end-to-
end learning approach which designed a CNN model
for autonomous driving in recent years. However, like
all CNN based model, (Bojarski et al., 2016) is sub-
ject to the problem of overfitting and vanishing gra-
dient (Srivastava et al., 2014)(Ma et al., 2017)(Klein
et al., 2018)(Su et al., 2017). Also, the loss rate and
accuracy for (Bojarski et al., 2016) can be further im-
proved.
To address the issue of overfitting and eventually
improve the loss rate and accuracy, we purposefully
add dropout layers to our model. Dropout is a pow-
erful regularization method for Multi-Layer Percep-
trons (MLPs) trained by Stochastic Gradient Descent
(SGD) (Szegedy et al., 2016)(Clevert et al., 2015)(Gal
and Ghahramani, 2016). During the forward propaga-
tion step of the SGD, the dropout layers consist in set-
ting zero to a random subset of the hidden activation.
Accordingly, the backward propagation in the SGD
is also modified. By this mean, dropout is able to
prevent the co-adaptation of learned hidden features
which is a source of overfitting. Eventually, the net-
work becomes less sensitive to the specific weights of
neurons and has a better capacity of generalization.
Figure 3 demonstrated the overview of the pro-
posed model in the study. For the first five layers,
we use convolutional layers to capture the key fig-
ures of the input data. The part of the structure is
derived from (Bojarski et al., 2016), which has been
approved effective to capture road features. After the
first five layers of iterative processing, the feature im-
ages for input data is well-learned by the system. The
output of convolutional layers is connected to four
fully-connected layers. At this stage, we try to add a
dropout layer between fully-connected layers because
a number of research (Szegedy et al., 2015)(Szegedy
et al., 2016)(Clevert et al., 2015) suggested that
End-to-end Learning Approach for Autonomous Driving: A Convolutional Neural Network Model
835
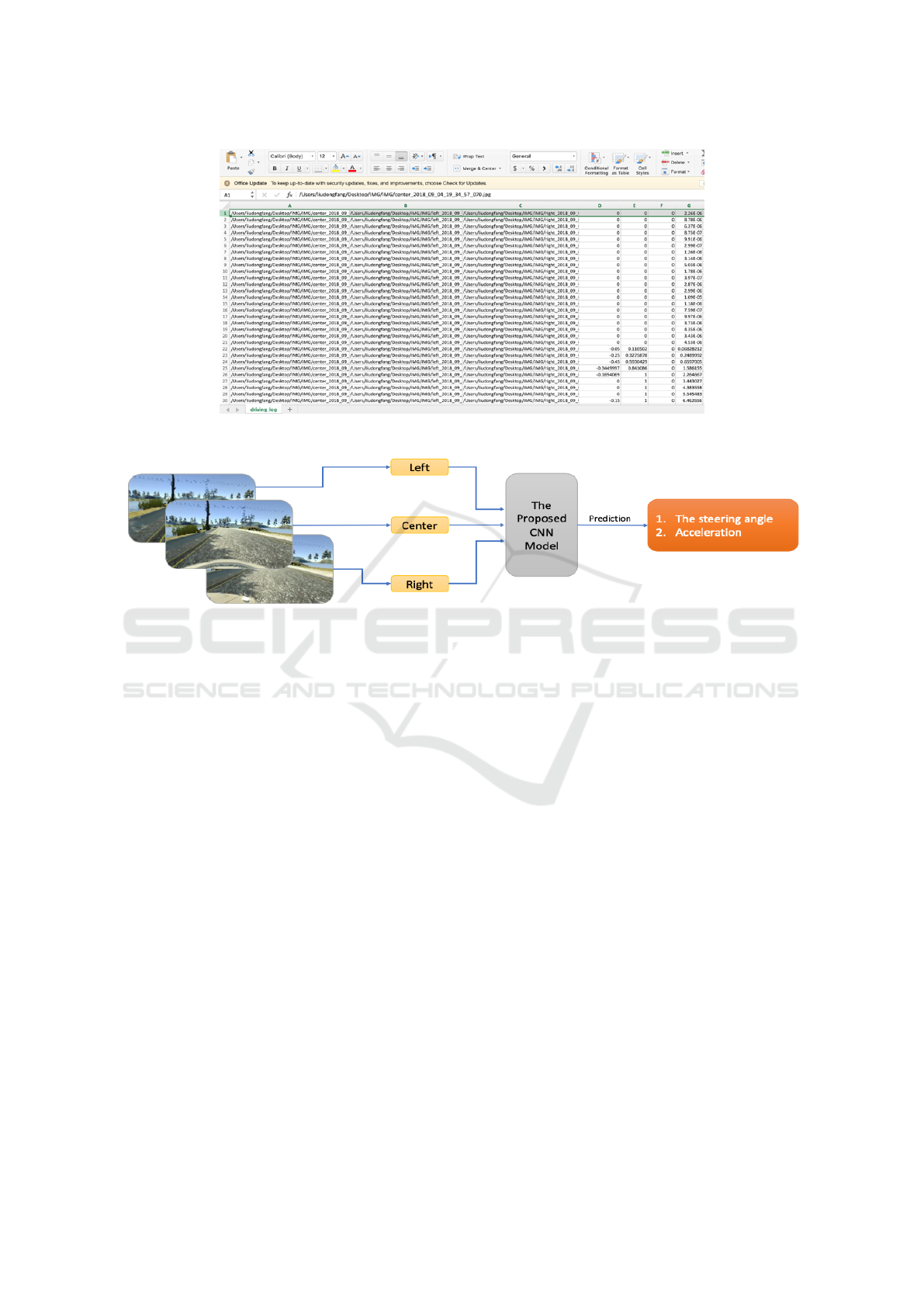
Figure 2: A Sample CSV file.
Figure 3: The Overall Framework.
dropout layer should be used between fully-connected
layers and not in convolutional layers. However, there
is a debate pertaining to where a dropout layer should
be added (Chen et al., 2018)(Clevert et al., 2015)(Gal
and Ghahramani, 2016)(Bluche et al., 2015). One
widely accepted solution is to add dropout layers
in different locations in the neural network and test
its overall performance (Chen et al., 2018)(Clev-
ert et al., 2015)(Gal and Ghahramani, 2016)(Bluche
et al., 2015). Following this rule, we purposefully
add the dropout layer in different locations between
the fully-connected layers and test the performance
for the entire network. In addition, considering the
fact that the dataset is relatively small, data augment
function is also carefully designed in order to create a
new data and prevent overfitting. The augment func-
tion we design include flipping (both vertically and
horizontally), translating (moving along either of the
x, y axis), cropping, and rotating.
In addition, when designing our model, we care-
fully compare four commonly used activation func-
tions such as ELU, LReLU, ReLU, and SReLU, in
order to address the problem of vanishing gradient.
After the comparison across the four activation func-
tions, we finally use ELU as our activation function
for our model for two main reasons. First, when pro-
cessing positive values, all of the four activation func-
tions have good performance for solving the problem
of vanish gradient. However, if the processed values
are negative, RelU will cause bias to the next neural
network layer because the output of RelU is zero. The
bias will be added cross later layers and amplify the
effect of bias weight. Second, although the outputs of
LReLU and PReLU is not zero when processing nega-
tive inputs, the two activation functions cannot main-
tain noise robustness when the input value is small.
On the contrast, ELU has soft saturation character-
istics, so when the input is a small negative value, it
improves the noise robustness and has a desirable per-
formance to address the problem of vanish gradient
(Szegedy et al., 2015)(Szegedy et al., 2016).
3 RESULTS AND DISCUSSIONS
3.1 Training Results
In the experiment, we utilize 32 as our batch size,
20,000 as our maximum training steps, and 15 as our
epochs for each training circle. The trained model
is automatically saved after the training. We dupli-
cate the model named NVIDIA and use the same
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
836
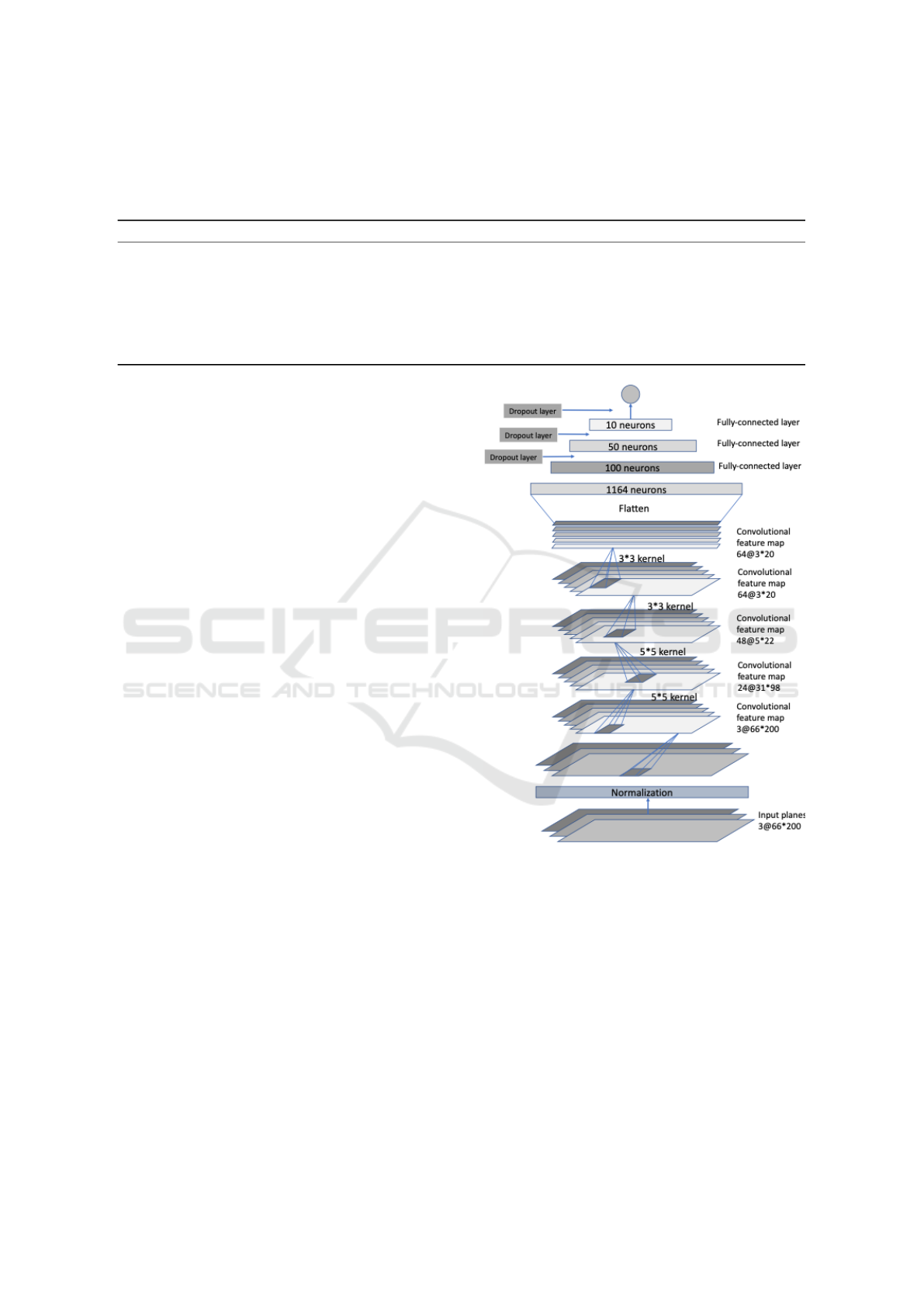
Table 2: The Results of Validation Loss Rate and Accuracy for Different Models. NVIDIA model is the model from (Bojarski
et al., 2016); Model 1 is the proposed model with dropout layer after the first fully-connected layer; Model 2 is the proposed
model with dropout layer after the second fully-connected layer; Model 3 is the proposed model with a dropout layer after the
third fully-connected layer.
Epoch 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
NVIDIA Loss rate 0.025 0.025 0.025 0.024 0.022 0.022 0.023 0.022 0.024 0.024 0.025 0.023 0.023 0.023 0.023
Accuracy 0.776 0.78 0.779 0.779 0.784 0.776 0.778 0.783 0.779 0.784 0.783 0.776 0.782 0.776 0.779
Model 1 Loss rate 0.026 0.026 0.026 0.026 0.027 0.028 0.029 0.028 0.028 0.028 0.029 0.028 0.027 0.027 0.027
Accuracy 0.76 0.76 0.764 0.765 0.765 0.774 0.775 0.76 0.76 0.77 0.75 0.76 0.76 0.76 0.76
Model 2 Loss rate 0.027 0.027 0.028 0.027 0.026 0.025 0.026 0.026 0.027 0.026 0.027 0.026 0.026 0.026 0.026
Accuracy 0.766 0.762 0.75 0.74 0.765 0.775 0.775 0.774 0.773 0.776 0.776 0.774 0.774 0.774 0.774
Model 3 Loss rate 0.025 0.025 0.025 0.024 0.022 0.022 0.022 0.022 0.022 0.021 0.021 0.021 0.021 0.021 0.022
Accuracy 0.772 0.778 0.779 0.776 0.781 0.783 0.773 0.778 0.776 0.777 0.775 0.78 0.778 0.78 0.781
dataset to train our models and the NVIDIA model.
We also add the dropout layer at different location
across fully-connected layers. The results for train-
ing dataset are demonstrated in Figure 6. Based on
the results, we can see that proposed models with
dropout layer have better training outcomes compared
to NVIDIA model. The final loss rate for models
with the dropout layer is smaller than that of (Bojarski
et al., 2016), as seen in Table 2. Also, the final accu-
racy for models with dropout layer is also higher than
that of (Bojarski et al., 2016), as seen in Table 2. The
proposed model 3 has best performance pertaining to
having lowest loss rate and highest accuracy in train-
ing dataset among all presented models. Model 3 is
the proposed model with dropout layer after the third
fully-connected layer.
Next, we further compare the proposed model 3
with the NVIDIA model in terms of the changing of
the loss rate in training and validation process, as seen
in Figure 5. The loss rate for model 3 in both train-
ing and validation continuously decreases. In con-
trast, the validation loss rate for the NVIDIA model
starts to increase at epoch 12 which is an indicator
for overfitting. Based on the results, adding dropout
layer effectively addresses the issue of overfitting and
improves the noise robustness of the original model.
The main contribution of this study is to build a
model that could surpass the performances of previ-
ous studies.
3.2 Generalization and Lane Keeping
Time
We purposefully evaluate the generalization of our
model. The Udacity simulator has two road tracks
with totally different road conditions. One road track
is a lake road and the other is a mountain road. Lake
road is very flat and has no steep curves. On the con-
trary, the mountain road has challenging road condi-
tions with a lot of steep curves. We use the mountain
road dataset to train our model and test the model to
Figure 4: The Comparison of ELU, LReLU, ReLU, and
SReLU.
run a car in the lake road track. Since a car running on
a mountain road needs frequent turns of steering an-
gle, if the trained model simply clones the behaviors
in the dataset, the generalization of the model could
be compromised because running on a flat road does
not need a large degree of steering angle. However,
the result from our experiment demonstrates that our
model has a desirable performance and it runs a car
on lake track.
In addition, we test the lane keeping time for our
model. We test our model 30 times on the lake road.
When running on the lake road track, our model can
End-to-end Learning Approach for Autonomous Driving: A Convolutional Neural Network Model
837
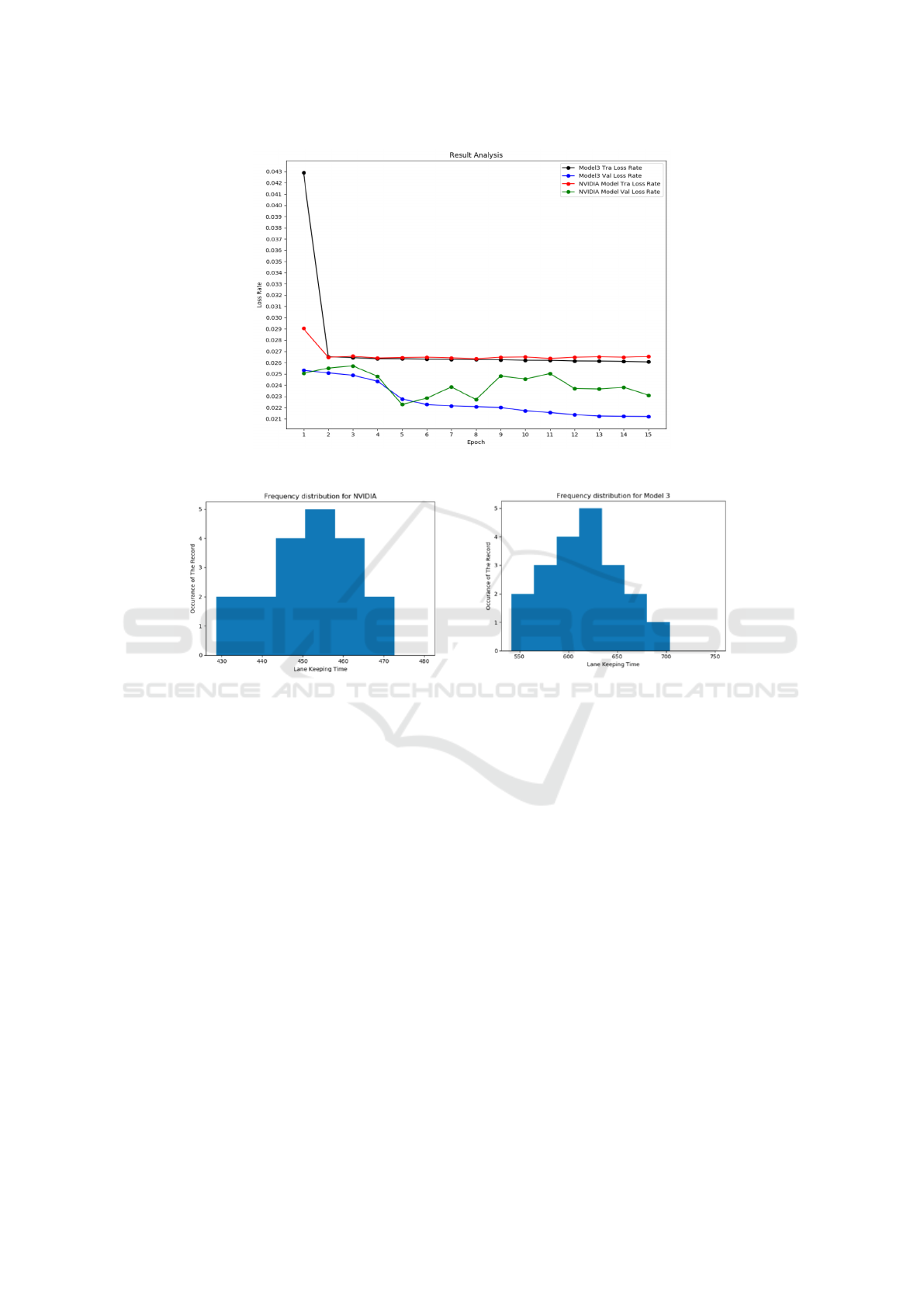
Figure 5: The Overall Framework.
Figure 6: Frequency Distribution of the NVIDIA Model and Model 3.
steer the car on the road and keep the car on the road
for more than 617.3 seconds average, as seen in Table
3. In addition, we use the NVIDIA model to steer a
car on the lake road track. The NVIDIA model can
keep the car in the road without running off the road
for 453.7 seconds average, as seen in Table 3. Since
we test the two model by using the same car and same
road track, we use paired t-test to evaluate the perfor-
mance difference between two models. We first check
the assumption of the paired t-test and ensure that the
collected data is normal distributioned, as seen in Fig-
ure 6. Then we run the paired t-test for the data. The
result is significant (p<0.0001) and Model 3 with the
dropout layer is better than NVIDIA model without
the dropout layer because of longer lane keeping time,
as seen in Table 4.
4 CONCLUSION
In this study, we design a CNN model based on an
end-to-end learning approach and address the prob-
lem of overfitting and vanish gradient. Our proposed
model outperforms the previous study which we rely
on as our model framework. In addition, we evaluate
the generalization of our proposed model. We use a
specific road condition to train our model and test it
on a different road condition. Finally, we record how
much time the car can remain in the lane without hu-
man intervention and the result indicates that the car
can stay on the road longer than the NVIDIA model.
Limitations for the project are a few. First, the ac-
tion for the end-to-end learning approach is defined
as steering angles and change of speed rate in our
study. However, actions for real driving scenario is
more complicated and should include reverse, brake,
and more. In addition, we did not consider obstacles,
such as pedestrians and other cars, in our research.
Future research can add object detection functions in
the model to simulate real road conditions.
ICAART 2019 - 11th International Conference on Agents and Artificial Intelligence
838
Table 3: Lane Keep Time: The report time is in second and
rounded up for keeping two decimals.
Test time Model 3 NVIDIA Model
1 582.3 450.6
2 624.5 472.4
3 541.7 442.3
4 693.1 443.7
5 599.2 458.3
6 612.4 451.4
7 643.8 454.2
8 605.9 451.8
9 564.1 484.9
10 642.4 438.4
11 656.4 460.4
12 604.5 464.1
13 587.1 434.8
14 627.2 469.9
15 623.2 457.5
16 674.4 428.7
17 675.7 449.4
18 611.8 456.3
19 604.2 461.6
20 572.8 443.4
Average 617.3 453.7
Table 4: Paired t-test for Model 3 and NVIDIA Model.
Variable Mean Statistic p-value
Model 3 617.3 16.63 8.84e-11<0.0001
NVIDIA Model 453.7
REFERENCES
Bluche, T., Kermorvant, C., and Louradour, J. (2015).
Where to apply dropout in recurrent neural networks
for handwriting recognition? In Document Analy-
sis and Recognition (ICDAR), 2015 13th International
Conference on, pages 681–685. IEEE.
Bojarski, M., Del Testa, D., Dworakowski, D., Firner, B.,
Flepp, B., Goyal, P., Jackel, L. D., Monfort, M.,
Muller, U., Zhang, J., et al. (2016). End to end learn-
ing for self-driving cars. arXiv, Cornell University:1
604.07316.
Chen, C., Seff, A., Kornhauser, A., and Xiao, J. (2015).
Deepdriving: Learning affordance for direct percep-
tion in autonomous driving. pages 2722 – 2730.
Chen, T., Lu, S., and Fan, J. (2018). S-cnn: Subcategory-
aware convolutional networks for object detection.
IEEE transactions on pattern analysis and machine
intelligence, 40(10):2522–2528.
Clevert, D.-A., Unterthiner, T., and Hochreiter, S. (2015).
Fast and accurate deep network learning by exponen-
tial linear units (elus). arXiv, Cornell University:
1511.07289.
Codevilla, F., Miiller, M., L
´
opez, A., Koltun, V., and Doso-
vitskiy, A. (2018). End-to-end driving via conditional
imitation learning. In 2018 IEEE International Con-
ference on Robotics and Automation (ICRA), pages 1–
9. IEEE.
Gal, Y. and Ghahramani, Z. (2016). A theoretically
grounded application of dropout in recurrent neural
networks. In Advances in neural information process-
ing systems, pages 1019–1027.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detec-
tion and semantic segmentation. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 580–587.
Klein, A., Christiansen, E., Murphy, K., and Hutter, F.
(2018). Towards reproducible neural architecture and
hyperparameter search.
Ma, C., Zhu, Z., Ye, J., Yang, J., Pei, J., Xu, S., Zhou, R.,
Yu, C., Mo, F., Wen, B., et al. (2017). Deeprt: deep
learning for peptide retention time prediction in pro-
teomics. arXiv, Cornell University: 1705.05368.
Muller, U., Ben, J., Cosatto, E., Flepp, B., and Cun, Y. L.
(2006). Off-road obstacle avoidance through end-to-
end learning. In Advances in neural information pro-
cessing systems, pages 739–746.
Pfeiffer, M., Schaeuble, M., Nieto, J., Siegwart, R., and
Cadena, C. (2017). From perception to decision: A
data-driven approach to end-to-end motion planning
for autonomous ground robots. In 2017 ieee interna-
tional conference on robotics and automation (icra),
pages 1527–1533. IEEE.
Pomerleua, D. (1989). Alvinn: an autonomous land vehicle
in a neural network. Advances in neural information
processing systems, pages 305–313.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in neural information
processing systems, pages 91–99.
R
¨
odel, C., Stadler, S., Meschtscherjakov, A., and Tscheligi,
M. (2014). Towards autonomous cars: the effect of
autonomy levels on acceptance and user experience.
Proceedings of the 6th International Conference on
Automotive User Interfaces and Interactive Vehicular
Applications, pages 1–8.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: a simple way
to prevent neural networks from overfitting. The Jour-
nal of Machine Learning Research, 15(1):1929–1958.
Su, W., Chen, L., Wu, M., Zhou, M., Liu, Z., and Cao, W.
(2017). Nesterov accelerated gradient descent-based
convolution neural network with dropout for facial ex-
pression recognition. In Control Conference (ASCC),
2017 11th Asian, pages 1063–1068. IEEE.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wo-
jna, Z. (2016). Rethinking the inception architecture
for computer vision. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2818–2826.
Xu, H., Gao, Y., Yu, F., and Darrell, T. (2017). End-to-
end learning of driving models from large-scale video
datasets. arXiv, Cornell University.
End-to-end Learning Approach for Autonomous Driving: A Convolutional Neural Network Model
839
