
Adaptive Exploration of a UAVs Swarm for Distributed Targets
Detection and Tracking
Mario G. C. A. Cimino
1
, Massimiliano Lega
2
, Manilo Monaco
1
and Gigliola Vaglini
1
1
Department of Information Engineering, University of Pisa, 56122 Pisa, Italy
2
Department of Engineering University of Naples “Parthenope”, 80143 Naples, Italy
Keywords: UAV, Swarm Intelligence, Stigmergy, Flocking, Differential Evolution, Target Detection, Target Tracking.
Abstract: This paper focuses on the problem of coordinating multiple UAVs for distributed targets detection and
tracking, in different technological and environmental settings. The proposed approach is founded on the
concept of swarm behavior in multi-agent systems, i.e., a self-formed and self-coordinated team of UAVs
which adapts itself to mission-specific environmental layouts. The swarm formation and coordination are
inspired by biological mechanisms of flocking and stigmergy, respectively. These mechanisms, suitably
combined, make it possible to strike the right balance between global search (exploration) and local search
(exploitation) in the environment. The swarm adaptation is based on an evolutionary algorithm with the
objective of maximizing the number of tracked targets during a mission or minimizing the time for target
discovery. A simulation testbed has been developed and publicly released, on the basis of commercially
available UAVs technology and real-world scenarios. Experimental results show that the proposed approach
extends and sensibly outperforms a similar approach in the literature.
1 INTRODUCTION
In this paper we consider the problem of discovering
and tracking static or dynamic targets in unstructured
environments, with no prior knowledge about their
location and about the obstacles layout (Senanayake
et al. 2016). Examples of scenarios in this context are:
(i) illegal dumps, in peri-urban and rural areas without
waste/sanitation facilities (Persechino et al. 2010);
(ii) anti-personnel landmines, left after a conflict in
areas such as natural parks, agricultural and grazing
lands (Rodriguez et al. 2014); (iii) early wildfire,
intentionally or naturally lighted in large open areas,
e.g., ecological habitats (Howden 2013); (iv) early
toxic or dangerous gas dispersion, in industrial/urban
areas characterized by large plants layouts (Qingchun
et al. 2011). The quality of the process can be
improved either by minimizing the time needed for
discovering the given targets, or by maximizing the
number of discovered targets in the given time.
In such type of missions, a promising approach is
to employ small Unmanned Aerial Vehicles (UAVs)
(Whitehead et al., 2014). The current UAVs
equipment and the available flight control logic offer
good solutions to the problem in a variety of fields.
However, the current solutions for coordinating the
exploration of UAVs swarms are not sufficiently
mature: limited flexibility, complex management and
application-dependent design are the main issues to
solve (Senanayake et al. 2016).
Essentially, in environmental monitoring and
surveillance one of the main requirements is to deal
with circumstances where the target and the space of
exploration are poorly specified. For this purpose, the
UAVs coordination strategy should be autonomous,
robust, resilient, and adaptive. Centralized logic
solutions are not effective for this purpose, due to the
high level of complexity, design and management
effort (McCune et al., 2013). In contrast,
decentralized logic approaches can provide a UAVs
swarm with a certain degree of autonomy (Meng et
al., 2014).
More specifically, a basic swarm of UAVs is
characterized by a large number of homogeneous
individuals, called agents, with local communication,
sensing and actuation capabilities (Maza et al., 2015).
A multi-agent system presents a number of
advantages: (i) it allows parallel/collective scan,
according to the principles of self-organization; (ii) it
is scalable, since by increasing the number of agents
in the swarm its effectiveness is poorly compromised;
(iii) it is flexible, because the agent logic is simple and
Cimino, M., Lega, M., Monaco, M. and Vaglini, G.
Adaptive Exploration of a UAVs Swarm for Distributed Targets Detection and Tracking.
DOI: 10.5220/0007581708370844
In Proceedings of the 8th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2019), pages 837-844
ISBN: 978-989-758-351-3
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
837
can be easily adapted to the scenario; (iv) it is robust,
and then the task accomplishment is not affected by
the fault of some agents (Aznar et al., 2014).
In general, a target search mission managed by a
multi-agent system is characterized by (i) the number
of targets and agents; (ii) the mobility of targets; (iii)
the complexity of the environment; (iv) the prior
knowledge about the target; (v) the type of swarm
coordination. We propose an environment model to
realistically represent the key characteristics of a
mission, and to test the effectiveness of a given
coordination logic. With regard to the swarm
coordination logic, the approach proposed in this
paper is based on three major aspects: (a) spatial self-
formation in order to better explore the environment,
i.e., the UAV movement is made according to a set of
mutual spatial constraints of arrangement; (b)
collaboration in order to exploit the knowledge
already acquired, i.e., each UAV both contributes and
is subject to some potential field influencing the
steering; (c) adaptation in order to optimize the
global behavior, i.e., the UAVs swarm adapts its
behavioral parameters, considering also (a) and (b), to
the specific type of mission.
In particular, the coordination logic is inspired by
behavioral patterns of biological systems. The
integration of biological patterns in a computational
coordination logic has to consider the enhancements
of the current UAVs information technology, such as
instant communication, simultaneous localization
and mapping, long-range sensing, etc. The final
purpose is to verify on realistic settings whether the
designed logic and the considered technological
enhancements allow a reduction of complexity and a
more effective optimization, keeping the essential
benefits of the original biological models.
For this purpose, we (i) propose a swarm
coordination algorithm that is adaptive to
heterogeneous scenarios with either static or dynamic
targets, (ii) develop and publicly release a simulation
testbed on which the commercially available UAVs
technology and real-world scenarios can be
considered.
The paper is structured as follows. The swarm
coordination logic and the operating environment is
presented in Section 2. In Section 3, the real-world
scenarios and the related UAV technologies are
detailed. Experimental results are presented and
discussed in Section 4. Finally, Section 5 summarizes
conclusions and future work.
2 ENVIRONMENT FOR SWARM
COORDINATION LOGIC
In the design of the testbed, an important distinction
is between flight simulator and exploration simulator.
A flight simulator focuses on control logic: it
recreates the equations that govern UAV fly, how it
reacts to external factors such as air density,
turbulence, wind shear, cloud, precipitation, etc. In
contrast, an exploration simulator focuses on
coordination logic, assuming that external factors are
already managed. It represents the exploration at a
different scale, which depends on the spatial and
temporal resolution needed to detect the target, and
recreates at that scale obstacles and target
distribution. Consequently, in the environment the
basic UAV movements and collision avoidance are
simulated for the specific purpose of exploration.
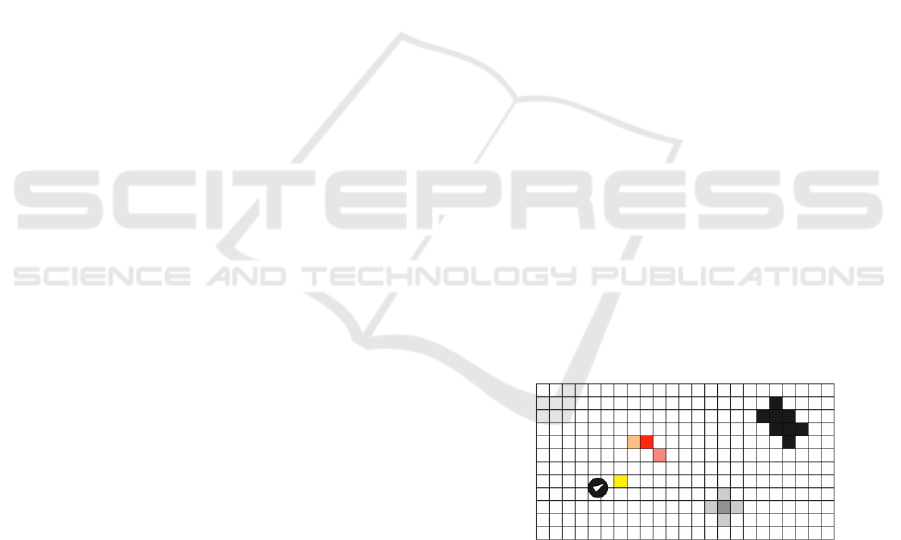
Figure 1 shows a simplified representation of the
environment with the available elements. For a better
granularity and without loss of generality, the search
problem is formulated by discretizing the
environment into a lattice of cells. In the
environment, a single UAV, or drone, is represented
by a disc with an inner arrowhead. An obstacle or a
target usually covers many cells. In figure, each
obstacle-cell is black, whereas each targeted cell is
colored. A targeted cell can either be discovered, i.e.,
yellow cell, or undiscovered, i.e. red cell. The color
intensity of a targeted cell represents the
quantity/presence of target, when applicable (e.g.,
fire, gas, etc.). Finally, a pheromone mark is
represented as a cluster of grey cells. The grey level
represents the pheromone intensity.
Figure 1: Environment and its elements: (from left to right)
drone, target, pheromone, and obstacle.
The temporal unit (tick) of the simulation
environment is set to a given number of seconds,
depending on the type of mission. On every tick, the
environment changes its current state to the next state,
according to the following rules. An obstacle-cell is
static. A targeted-cell can either be static (e.g.
landmine or dump) or dynamic (e.g., fire or gas). The
target dynamics is supplied as a sequence of frames
whose transition is ruled by a preset time frequency.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
838
This both avoid the effort of coding the equations
underlying the dynamics of targets and allows to use
real available frames to recreate a new scenario. The
grey level of a pheromone cell is dynamic, and it is
updated following an evaporation rule. A pheromone
mark is released by a drone when a target is found
(release rule). The drone position and direction is
dynamic and set according to exploration and
coordination rules. For a given type of mission, all
rules can be parametrically adapted by an
evolutionary algorithm which improves the overall
quality of the search process.
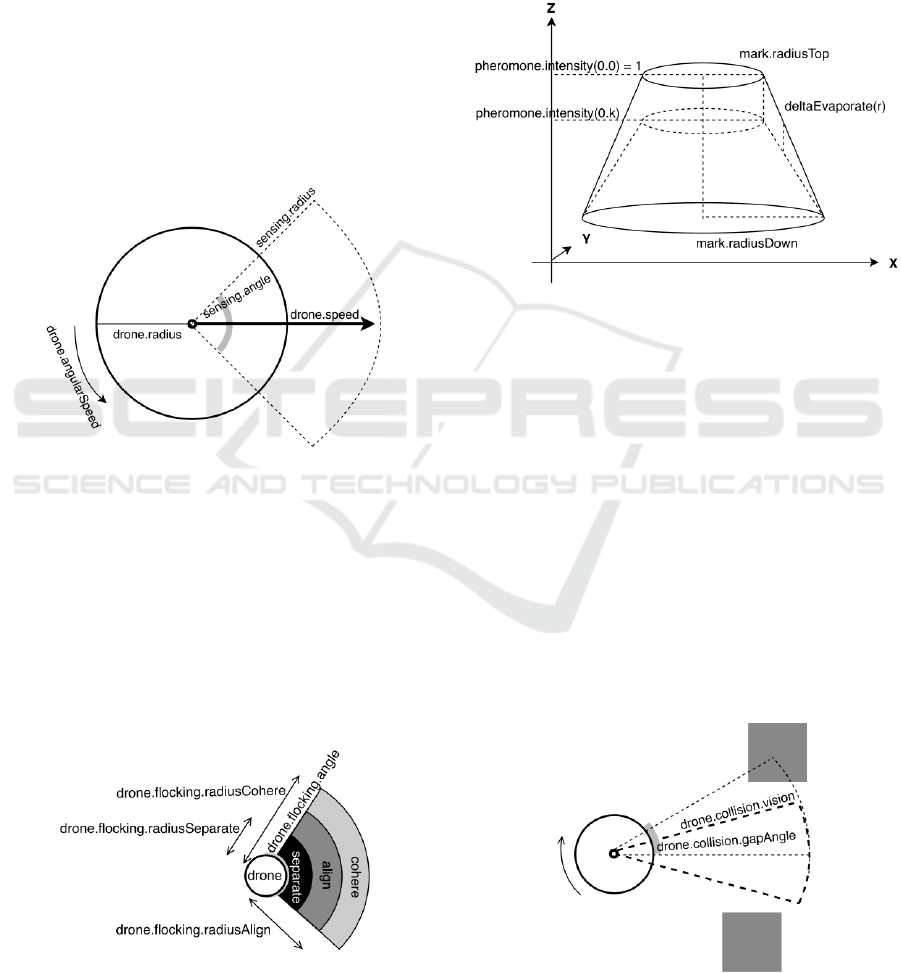
Specifically, Figure 2 shows a drone model with
the related parameters. The simulator takes into
account the drone cruise speed, acceleration, angular
speed, battery duration, drone size, sensing angle and
sensing radius.
Figure 2: Drone model with parameters.
Figure 3 shows the formation rules, based on
Reynolds’ flocking (1987): rules of alignment,
separation, and cohesion. Alignment aligns the
drones heading to the average heading of nearby
agents (flock mates). Separation keeps a large
formation by maintaining a minimum distance among
flock mates. Cohesion directs each agent towards the
center of the flock mates. A global angle of vision and
different ranges of radius characterize the three areas
of influence.
Figure 3: Formation rules (flocking).
Figure 4 shows a 3D shape of a single pheromone
mark, where (x,y) is the environment and z is the
pheromone intensity. A mark is modelled as a
truncated cone determined by the parameters
radiusTop, radiusDown, initial pheromone intensity.
When overlapping, pheromone marks can aggregate
in pheromone tracks. The track evaporates over the
time: every tick, its intensity is linearly reduced by a
given amount (deltaEvaporate).
Figure 4: Pheromone mark (stigmergy).
In the literature, the indirect communication
mechanism based on pheromone is called stigmergy
(Cimino et al. 2015a): an agent’s action produces a
mark which, in turn, incites another action, which
produces another mark, and so on. In the proposed
stigmergy, when a drone detects a new targeted cell,
the drone releases a pheromone mark on the location
of the sensed target. Pheromone acts as an attractive
potential on neighboring drones. While unknown
targets are sensed, additional pheromone marks are
released by flock members, thus enabling an
incremental positive feedback up to completion of all
targets in the proximity of the initial target. After a
certain time, the pheromone intensity cannot be
reinforced, and in practice disappears.
Figure 5 shows the collision avoidance model.
Figure 5: Collision avoidance.
Adaptive Exploration of a UAVs Swarm for Distributed Targets Detection and Tracking
839

The drone obstacle vision is set via two
parameters, i.e., collision.vision and collision.angle,
creating a circular sector area, whose vertex is
centered on the drone. When an obstacle or another
drone is detected in the collision area, the drone
changes its heading and speed to avoid the obstacle.
The area that will be occupied by the drone in the next
tick can be easily calculated via its velocity and its
possible headings. Thus, the multiple drones can be
accordingly organized in the current instant so as to
avoid overlapping with drones and obstacles at the
next temporal tick.
Overall, the swarm logic at each tick can be
summarized by the following pseudocode:
function SwarmSearch(environment)
tick = 0; targetsFound = 0;
do
evaporate(pheromone);
foreach drone d in swarm
if targets in d.sensing then
markTargetsFound(targets);
releasePheromone(targets.position);
targetsFound = targetsFound + 1;
endif
if obstacles in d.vision then
turnAway(d.heading, obstacles);
elseif pheromone in d.sensing then
turnTowards(d.heading,pheromone);
elseif flockmates in d.flock then
turnForFlocking(d.heading, d.flock);
else
turnForRandomWalk(d.heading, wiggle);
endif
moveForward(drone);
endfor
tick = tick + 1;
while (targetsFound < targetsThreshold)
or (tick = maxSearchTime);
return {tick, targetsFound};
function QualityMeasure(environment)
if targets.dynamic then
totTargets = 0;
foreach frame in environment
targets = SwarmSearch(environment);
totTargets += targets/targetsFrame;
endfor
return totTargets/numFrame;
else
tick = SwarmSearch(environment);
return tick;
endif
To adapt the swarm behavior to the environment,
the quality of the process is measured and optimized
by using the Differential Evolution (DE) algorithm
(Cimino et al. 2015b). Specifically, let K be the
number of adaptive parameters of the mission. In DE
a solution is represented by a real K-dimensional
vector. The overall quality of the process is optmized
either by minimizing the time needed for discovering
the given targets (static targets), or by maximizing the
average number of discovered targets in the overall
search time (dynamic targets). The adaptation process
is an intrinsic part of the swarm: in some sense only
after the optimization the initial set of UAVs becomes
a swarm, i.e., an effective organism specialized for
the type of mission.
3 SCENARIOS AND RELATED
TECHNOLOGICAL SETTINGS
In this section, the scenarios used and the various
quality measurements are illustrated. Table 1
summarizes the main features of each scenario. The
first three scenarios are static: Illegal Dump is based
on the abusive trash map in Paternò, Italy (Trashout
2018); Rural Mine and Urban Mine are based on
publicly available data of landmines in areas near
Sarajevo, in Bosnia-Herzegoniva (See-demining,
2018). The remaining scenarios are dynamic: Fire
Tracking comes by a propagation model developed
by the Northwestern University (Wilensky, 2018);
H
2
S Leak is based on a sour gas accident occurred in
December 2003, in Chongqing City, northeastern
Sichuan Gas Field, China (Ma Q.C. et al. 2011); LPG
Leak, is based on an accident occurred in June 2009
in Viareggio, Italy, and involving an LPG railcar
rupture in a congested urban area (Pontiggia et. al.
2011).
Table 1: Characteristics of each scenario.
Scenario
Area size
(m × m)
Targets
Animation
No of
frames
Illegal Dump
400 × 400
0 min.
1
Rural Mine
400 × 400
0 min.
1
Urban Mine
400 × 400
0 min.
1
Fire Tracking
1400 × 1400
20 min.
5
H
2
S Leak
4816 × 4400
48 min.
4
LPG Leak
500 × 300
4 min.
4
To show the environmental complexity, Figure 6
and Figure 7 show the satellite map used for Illegal
Dump, and the corresponding initial vector image
represented in the simulation environment,
respectively. Here, obstacles (buildings and trees) are
represented in black, whereas targets are represented
as red points. Drones, represented as purple triangles,
are placed at the corners and are oriented towards the
center of the area. Figure 8 shows another scenario,
Urban Mine, during the search process. Here, the
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
840

targets found are represented in yellow. A large
pheromone cloud is clearly visible in the center of the
area, where a higher concentration of targets has
attracted a relevant number of drones.
Figure 6: Illegal Dump, satellite image (Google Maps ©).
Figure 7: Illegal Dump, vector image.
The environmental characteristics have been
considered for the technical specifications of the
commercially available UAV. Table 2 and Table 3
show, respectively, the technical specifications of the
drone “Dji Matrice 200” (www.dji.com/matrice-200-
series), and the sensing equipment for each scenario.
Such technology has been selected on the basis of
gained knowledge and skill over a number of projects
using UAV technology for environmental monitoring
and surveillance.
Figure 8: Urban Mine, simulator image with pheromone.
Table 2: Technical specifications of the commercial drone
“Dji Matrice 200”.
Parameter
Value
Radius
0.3 m
Max speed
17 m/s
Max acceleration
4.4 m/s
2
Max angular speed
2.6 rad/s
Max angular acceleration
6.9 rad/s
2
Battery duration
24-38 min
Obstacle vision distance
3-30 m
Obstacle vision angle
60°
Table 3: Technical specifications of the sensing equipment,
for each scenario.
Scenario
Cruise
speed
(m/s)
Sensing
technology
Sensor model
Sensing
radius
Illegal
Dump
4
Visual +
Thermal
Dji Zenmuse
XT2
5 m
Rural
Mine
4
Visual +
Thermal
Dji Zenmuse
XT2
5 m
Urban
Mine
4
Visual +
Thermal
Dji Zenmuse
XT2
5 m
Fire
Tracking
12
Visual
Dji Zenmuse
XT2
36 m
H
2
S
Leak
8
Electro-
chemical
Dräger
X-am 5600
0 m
LPG
Leak
4
Resistive
NiTiO
3
0 m
Specifically, the sensing technology proposed for:
(i) Illegal Dump, is based on (Persechino et al. 2010)
Adaptive Exploration of a UAVs Swarm for Distributed Targets Detection and Tracking
841

and (Lega et al. 2012); (ii) Rural and Urban Mine, is
based on (Rodriguez et al. 2014); (iii) Fire Tracking,
is based on (Cruz et al. 2016). The Sensor proposed
for H2S Leak and LPG Leak is based on (Neumann
et al. 2013) and (Chaudhari, 2018), respectively.
4 EXPERIMENTAL RESULTS
The environment and the coordination logic are
implemented on NetLogo, a leading simulation
platform for swarm intelligence (ccl.northwestern
.edu/netlogo). The adaptation module is implemented
on MATLAB ©, a numerical optimization framework
(www.mathworks.com). The source code of the
integrated system, called Sciadro 3.1, together with
the scenarios, has been publicly released on the
Github platform (Cimino et al. 2018).
As a pilot example, Figure 9 and Figure 10 show
two frames of the Fire Tracking scenario. Here, the
pheromone clouds clearly show that the swarm is
tracking the fire evolutions.
Figure 9: Fire Tracking, simulation frame, tick = 1013.
Figure 11 shows the number of targeted cells found
(%) against time (sec). The plot indicates a constant
trend of targets found per second, up to about 95%.
Since this is commonly a point of trend variation, to
shorten the simulation duration the targetThreshold
value is set to 95% in the function SwarmSearch, for
static scenarios. For a dynamic scenario, the
maxSearchTime, i.e., the frame period, can be
calculated as the ratio between targets animation and
number of frames. For example, in the Fire Tracking
scenario, it is set to 2060/5 = 240 sec.
Figure 10: Fire Tracking, simulation frame, tick = 1277.
Thus, for static scenarios the quality measure is the
time needed for the target threshold, whereas for
dynamic scenarios it is the average percentage of
targets discovered in each frame. The purpose of the
DE is to find the parameters minimizing the quality
measure, namely the fitness.
More formally, given a simulated scenario , made
of: (i) simulation instants of time
; (ii) a set of
drones , each drone having a dynamic position
; (iii) a set of targets , each target
having a fixed position
. The set of targets
already found
, at a given instant of time t,
is the set of targets for which it exists a time
and a drone such that the drone’s position allows
the detection of the target’s position (relationship
denoted as “”):
(1)
The fitness of the static simulated scenario is then
defined as the minimum instant of time for which
has cardinality greater than or equal to
:
(2)
In case of dynamic scenarios, the targets can change
every frame transition period P, i.e.,
,
, where is the predefined
final instant of the simulation. The fitness of the
dynamic simulated scenario is then defined as the
average percentage of targets discovered in all frames:
(3)
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
842

Figure 12 shows the average best fitness, over 10
trials, against the number of generations, for the Rural
Mine scenario.
Figure 11: Percentage of targets found against time.
The figure clearly shows the structural importance
of DE adaptation, since it improves the performance
by 27%. Table 4 shows the performance of 80 UAVs
swarm, adapted for each scenario, in terms of the 95%
confidence interval over 10 repeated trials. The
number of UAVs has been determined by setting
incremental values and assessing the impact on
performance. For example, table 5 shows the
performance of 20, 40, 60, 80 UAVs for Fire
Tracking, in terms of 95% confidence interval over
10 repeated trials.
Figure 12: DE-based adaptation, average best fitness
against number of generations.
Finally, to better show the effectiveness of the
proposed approach, the same parameters have been
set in the previous version, valid for static scenarios
only, published in (Alfeo et al. 2018), hereafter called
Sciadro 2.0. For this purpose, the sensing radius has
been set to 4. The results, in Table 6, clearly show that
the proposed version sensibly outperforms Sciadro
2.0.
Table 4: 80 UAVs swarm performance adapted for each
scenario.
Scenario
Performance
Illegal Dump
121.70 ± 4.75 sec.
Rural Mine
125.96 ± 8.90 sec.
Urban Mine
152.38 ± 5.25 sec.
Fire Tracking
99.88 ± 0.06 %.
H
2
S Leak
98.78 ± 0.17 %
LPG Leak
93.88 ± 0.28 %
Table 5: Fire Tracking: swarm performance for a different
number of adapted UAV.
No of UAVs
Performance
20
60.64 ± 2.06 %
40
90.36 ± 0.54 %.
60
98.43 ± 0.25 %
80
99.88 ± 0.06 %
5 CONCLUSIONS
The paper summarizes the design of a bio-inspired
approach for the coordination of UAVs swarm
involved in distributed targets detection and tracking.
The coordination logic includes a spatial self-
formation and a collaboration based on dynamic
potential field. Moreover, the swarm adapts its
parameters to the specific mission by using an
optimization algorithm. A simulation testbed has been
developed and publicly released, using real-world
UAV technology and scenarios. Experiments are
encouraging, since the proposed approach extends and
sensibly outperforms a similar approach in the
literature. To provide comparative results with other
approaches is considered a key investigation task for
future work.
Table 6: Comparative analysis of performance (sec.).
Scenario
Sciadro 2.0
Sciadro 3.1
Illegal Dump
363.20 ± 102.6
159.03 ± 5.35
Rural Mine
195.80 ± 49.60
193.43 ± 6.79
Urban Mine
303.00 ± 85.70
208.76 ± 5.27
ACKNOWLEDGEMENTS
This work was carried out in the framework of the
SCIADRO project, co-funded by the Tuscany Region
(Italy) under the Regional Implementation
Adaptive Exploration of a UAVs Swarm for Distributed Targets Detection and Tracking
843

Programme for Underutilized Areas Fund (PAR FAS
2007-2013) and the Research Facilitation Fund
(FAR) of the Ministry of Education, University and
Research (MIUR).
REFERENCES
Alfeo, A.L., Cimino, M.G.C.A., De Francesco, N., Lega, M.,
Vaglini, G. "Design and simulation of the emergent
behavior of small drones swarming for distributed target
localization", Journal of Computational Science, Elsevier
Science, Vol. 29, Pages 19-33, 2018, (ISSN 1877-7503).
Aznar, F., Sempere, M., Pujol, M., Rizo, R., and Pujol, M.
(2014). Modelling oil spill detection with swarm drones.
In Abstract and Applied Analysis, volume 2014.
Hindawi.
Chaudhari, P. and Mishra, S., 2018. Ilmenite phase nickel
titanate nanowhiskers as highly sensitive LPG sensor at
room temperature. Journal of Materials Science:
Materials in Electronics, 29(1), pp.117-123.
Cimino, M.G.C.A., Lazzeri, A., Vaglini, G. "Combining
stigmergic and flocking behaviors to coordinate swarms
of drones performing target search", in The Sixth
International Conference on Information, Intelligence,
Systems and Applications (IISA), pp. 1-6, IEEE, 2015.
Cimino, M.G.C.A., Lazzeri, A., Vaglini, G. "Improving the
analysis of context-aware information via marker-based
stigmergy and differential evolution." International
Conference on Artificial Intelligence and Soft
Computing (ICAISC). Springer, Cham, 2015.
Cimino, Mario G.C.A., Monaco M., Piscione P., Alfeo L.
(2018). Github platform, Sciadro 3.1 repository,
(https://github.com/mlpi-unipi/drones-swarm). Accessed
November 10, 2018.
Cruz, H., Eckert, M., Meneses, J., Martínez, J.-F. "Efficient
forest fire detection index for application in unmanned
aerial systems (UASs)." Sensors 16, no. 6 (2016): 893.
Howden, D. J., “Fire tracking with collective intelligence
using dynamic priority map”, in IEEE Congress on
Evolutionary Computation (CEC), 2013. IEEE, 2013, pp.
2610-2617.
Lega, M., J. Kosmatka, C. Ferrara, F. Russo, R. M. A. Napoli,
and G. Persechino. "Using advanced aerial platforms and
infrared thermography to track environmental
contamination." Environmental Forensics 13, no. 4
(2012): 332-338.
Ma Q.C., Zhou L.B. “CFD simulation study on gas
dispersion for risk assessment: a case study of sour gas
well blowout”. Safety Science 2011;49(8):1289–95.
Maza, I., Ollero, A., Casado, E., and Scarlatti, D. (2015).
Classication of multi-UAV architectures. In Handbook
of unmanned aerial vehicles, pages 953-975. Springer.
McCune, R., Purta, R., Dobski, M., Jaworski, A., Madey, G.,
Madey, A., Wei, Y., and Blake, M. B. (2013).
Investigations of dddas for command and control of uav
swarms with agent-based modeling. In Simulation
Conference (WSC), 2013 Winter, pages 1467-1478.
IEEE.
Meng, W., He, Z., Su, R., Shehabinia, A. R., Lin, L., Teo, R.,
and Xie, L. (2014). Decentralized control of multi-UAVs
for target search, tasking and tracking. IFAC Proceedings
Volumes, 47(3):10048{10053.
Neumann, P.P., Asadi, S., Bennetts, V.H., Lilienthal, A.J. and
Bartholmai, M., 2013. Monitoring of CCS areas using
micro unmanned aerial vehicles (MUAVs).
Persechino, G., P. Schiano, M. Lega, R. M. A. Napoli, C.
Ferrara, and J. Kosmatka. "Aerospace-based support
systems and interoperability: The solution to fight illegal
dumping." WIT Transactions on Ecology and the
Environment 140 (2010): 203-214.
Persechino, G., P. Schiano, M. Lega, R. M. A. Napoli, C.
Ferrara, and J. Kosmatka. "Aerospace-based support
systems and interoperability: The solution to fight illegal
dumping." WIT Transactions on Ecology and the
Environment 140 (2010): 203-214.
Pontiggia, M., Landucci, G., Busini, V., Derudi, M., Alba,
M., Scaioni, M., Bonvicini, S., Cozzani, V., Rota, R.,
2011. “CFD model simulation of LPG dispersion in
urban areas”. Atmospheric Environment 45, 3913e3923.
Qingchun, Ma, Laibin, Zhang, “CFD simulation study on gas
dispersion for risk assessment: a case study of sour gas
well blowout”, Safety Science, 2011; 49(8):1289–95.
Reynolds, C. W. “Flocks, herds and schools: A distributed
behavioral model”. In ACM SIGGRAPH computer
graphics, volume 21, pages 25-34 (1987), ACM.
Rodriguez, J., C. Castiblanco, I. Mondragon, and J. Colorado.
"Low-cost quadrotor applied for visual detection of
landmine-like objects." In Unmanned Aircraft Systems
(ICUAS), 2014 International Conference on, pp. 83-88.
IEEE, 2014.
Rodriguez, J., Castiblanco, C., Mondragon, I., Colorado, J.:
Low-cost quadrotor applied for visual detection of
landmine-like objects. In: International Conference on
Unmanned Aircraft Systems (ICUAS), pp. 83–88. IEEE
(2014).
See-demining, Mine detection Center for the Region of
South-Eastern Europe, accessed February 2018,
http://www.see-demining.org/main.htm,
Senanayake, M., Senthooran, I, Barca, J. C., Chung, H.,
Kamruzzaman, J., Murshed, M., “Search and tracking
algorithms for swarms of robots: A survey”, Robotics
and Autonomous Systems 75 (2016) 422–434.
Trashout, Trash Maps Data, accessed February 2018,
https://www.trashout.ngo/trashmap/?ref=trashout.me.
Whitehead, K., Hugenholtz, C. H., Myshak, S., Brown, O.,
LeClair, A., Tamminga, A., Barchyn, T. E., Moorman,
B., and Eaton, B. (2014). Remote sensing of the
environment with small unmanned aircraft systems
(uass), part 2: Scientic and commercial applications.
Journal of unmanned vehicle systems, 2(3):86-102.
Wilensky, U. Center for Connected Learning and Computer-
Based Modeling, Northwestern University, Evanston, IL.
NetLogo Fire models library, November 2018,
http://ccl.northwestern.edu/netlogo/models/Fire.
ICPRAM 2019 - 8th International Conference on Pattern Recognition Applications and Methods
844
