
Fuzzy Estimation of Link Travel Time from a Digital Elevation Model
and Road Hierarchy Level
J. St
¨
otzer, S. Wursthorn and S. Keller
Institute of Photogrammetry and Remote Sensing, Karlsruhe Institute of Technology, Germany
Keywords:
OpenStreetMap, Link Travel Time, Digital Elevation Model, Fuzzy Control System, Routing.
Abstract:
Link travel time is crucial for finding the fastest path in a road network which is an issue in many fields
of research. Readily available data sources like OpenStreetMap (OSM) often lack information about the
maximum speed of a road which is needed to calculate link travel time. In rural regions, the average speed
of a road depends mainly on two parameters: slope and road quality. In this paper, we develop a fuzzy
control system (FCS) which estimates link travel time based on these two input parameters. The OSM road
network and a digital elevation model (DEM) serve as free-to-use and worldwide available input data. Google
Directions API data provides a reference for the link travel time. The setup of the FCS as well as its tuning and
validation is described in detail. Furthermore, two approaches to derive slope from a DEM are presented and
compared. The FCS is applied exemplary for the BioB
´
ıo region in central Chile. The results of the case study
reveal the potential of this approach. Link travel times are estimated by the FCS with an R
2
of at least 87.8 %.
In future work, the FCS can be designed with more input parameters to achieve an even better performance.
1 INTRODUCTION
Finding the fastest path in a road network is important
for many applications such as route planning, disaster
risk management or transport of goods. To calculate
the fastest path, an associated link travel time is as-
signed to every edge in the road network. The link
travel time is the average time a vehicle spends trav-
elling an edge in the road network Stanojevic et al.
(2018). Especially in studies on critical road infras-
tructure and accessibility, link travel time often serves
as a cost factor for the road network Knoop et al.
(2012); Li et al. (2011); Scott et al. (2006).
Many of these approaches use OpenStreetMap
(OSM) data. The OSM project provides free road
network data with global coverage. OSM data is col-
lected by volunteers worldwide and can be edited by
anyone. The representation of the road network in
OSM is more than 80 % complete Barrington-Leigh
and Millard-Ball (2017). Furthermore, 40 % of coun-
tries worldwide have a fully mapped road network.
Many approaches using OSM data raised the question
of data quality which caused a number of investiga-
tions on that topic. To summarize the results, OSM
can be highly accurate and complete and in some
regions even better than commercial or administra-
tive datasets Cipeluch et al. (2010); Girres and Touya
(2010); Haklay (2010); Neis et al. (2011); Jackson
et al. (2013); Dorn et al. (2015); Demetriou (2016).
Even in some developing countries the completeness
of the road network is high at a national level Ludwig
et al. (2011); Mahabir et al. (2017).
While the quality of the OSM road network it-
self is satisfying for most approaches, routing appli-
cations need additional metadata. Although the possi-
bility to include maximum speed information in OSM
is given, most roads lack this information. Figure 1
shows the proportion of the total length of the upper
level roads (defined in Table 1) with maximum speed
information per country. Worldwide, only 7.5 % of all
road elements in OSM feature a maximum speed in-
formation. However, to compute link travel time and
consequently fastest paths, speed information for ev-
ery edge in the road network is crucial.
The influencing factors on link travel time in ur-
ban and in rural areas differ a lot. While traffic, turn
restrictions, one way streets and traffic signals have
a huge impact on travel time in the city, other fac-
tors dominate in rural areas. Especially in developing
countries, the road quality has a considerable impact
on the link travel time. Asphalted roads allow for a
higher velocity than unsealed gravel or mud roads.
Also, the wider a road is and the more lanes it has,
the faster a vehicle can drive. Another big influenc-
Stötzer, J., Wursthorn, S. and Keller, S.
Fuzzy Estimation of Link Travel Time from a Digital Elevation Model and Road Hierarchy Level.
DOI: 10.5220/0007655800150025
In Proceedings of the 5th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2019), pages 15-25
ISBN: 978-989-758-371-1
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
15
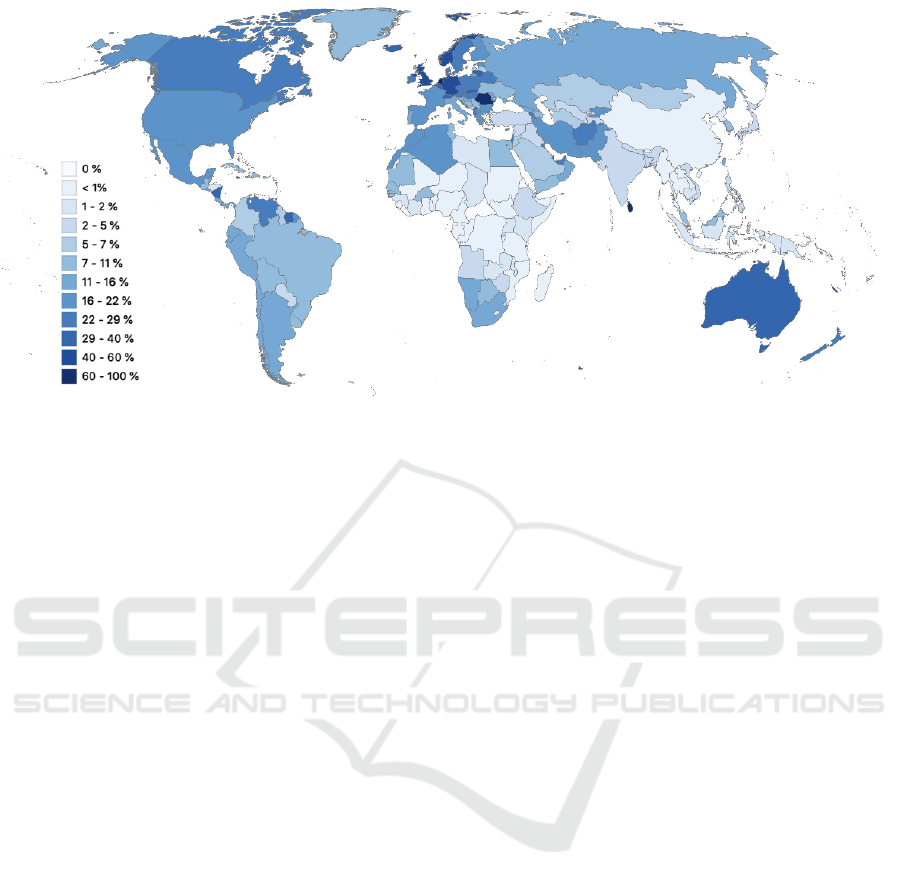
Figure 1: Proportion of the total length of all roads (road classes in Table 1) with maximum speed information in Open-
StreetMap (maxspeed tag) per country. Only 7.5 % of all road elements stored in the OSM world dataset have information on
maximum speed.
ing factor is the topography of the terrain Collischonn
and Pilar (2000). The slope of a road limits the driv-
ing speed, both by an increase in sinuosity and by the
slope itself.
Many studies and routing applications rely on
fixed speed profiles for every road class defined by
various input parameters. This leads to jumps at the
class borders. A fuzzy control system (FCS) is able
to fuzzify these input parameters and provides a more
continuous, nonlinear output. Furthermore, as it is
based on expert knowledge, it does not rely on nonex-
istent reference data to learn its behaviour.
Focusing on rural road networks, in this paper we
develop a FCS to estimate link travel time from two
input parameters: road hierarchy level and slope. The
OSM road network and SRTM (Shuttle Radar Topog-
raphy Mission) data serve as input data for the FCS.
We use the Google Directions API (GD-API) as ref-
erence data to tune and to validate the FCS. Two ap-
proaches to derive road slope from a digital elevation
model (DEM) are presented. The FCS is set up with
membership functions for the input parameters slope
and hierarchy level and for the output parameter ve-
locity. Then, it is tuned and validated with GD-API
data. A case study is performed in the BioB
´
ıo region
in Chile.
The main contributions of this paper are summarized
in the following:
• development of a FCS with slope and hierarchy
level as input and velocity as output parameters;
• validation of the developed concept with GD-API
data;
• enrichment of the rural OSM road network with
estimated link travel times;
• usage of open source and worldwide available
data (OSM, SRTM);
• exemplary case study for the BioB
´
ıo region in
Chile.
In this paper, we first provide an overview of the
related work on link travel time in OSM in Section 2.1
and introduce the concept of Fuzzy Control in Sec-
tion 2.2. The input and reference datasets are de-
scribed in Section 3. In Section 4.1 two approaches
to calculate slope are presented. Then, the setting
up, tuning and validation of the FCS is explained in
Section 4.2. A description of the case study (Sec-
tion 5.1), the results (Section 5.2) and the discussion
(Section 5.3) are presented. Finally, a conclusion and
an outlook are given in Section 6.
2 RELATED WORK
In this section, we briefly introduce the related work
on two topics. First, we investigate how link travel
time is calculated in other approaches that rely on
OSM data. Then, we introduce the concept of Fuzzy
Control, its advantages and how other studies apply
this concept.
2.1 Link Travel Time in OSM
Many routing applications exist that compute fastest
paths, and consequently link travel time, and base on
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
16

OSM data. Popular examples are the OpenRouteSer-
vice ORS (2018), the Open Source Routing Machine
(OSRM) Luxen and Vetter (2011), the OpenTripPlan-
ner OTP (2018) and YOURS YOURS (2018). The
latter three are open source applications and use the
maximum speed information in OSM to calculate link
travel time if available. If not, the OSM Wiki OSM
Wiki (2016) contains default speed limits for some
countries (24 countries worldwide) which are pro-
cessed and applied by these routing applications. The
applications also include other metadata like the road
type and the number of lanes (if available) to derive
fixed speed profiles for every road class. The algo-
rithm for the OpenRouteService is not accessible by
public. But it seems more complex than the other
routing applications as it provides additional infor-
mation like the slope and type of a route. However,
like many commercial routing applications such as
Google Maps or Bing Maps the exact calculation is
not transparent.
Few studies address the issue to derive link travel
time from the OSM road network. Stanojevic et al.
(2018) present a methodology to calculate link travel
times based on origin-destination and timestamp in-
formation generated by a taxi fleet and OSM data.
They estimate travel times in urban regions with 60 %
lower errors than OSRM. A lot of related work con-
centrates on urban regions and how to improve the es-
timation of travel time in trafficed networks. Steiger
et al. (2016) include real-time traffic data into the
OpenRouteService application.
As mentioned in Section 1, the important factors
for routing in urban and rural areas differ consider-
ably. In the design standards of Asian highway routes,
the assigned maximum speed of a road in a rural re-
gion is directly dependent on the slope of the ter-
rain Behera (2008). Brabyn and Skelly (2001) model
access to public hospitals and calculate shortest and
fastest paths. To estimate the link travel time, they
consider if the road is inside or outside an urban area,
the number of lanes and the sinuosity of a road. The
sinuosity of a road is calculated with a sinuosity in-
dex. They categorize the roads by these factors and
assign fixed velocities for every combination.
This study aims at filling some of the existent gaps
in the related work. Most routing applications with
OSM focus more on the city than the rural areas and
only include country wide speed limits in their travel
time calculation. Few studies focus on the calculation
of link travel time. The ones that do, rely on self-
collected or commercial datasets. To our knowledge,
a fuzzy control system has never been applied to esti-
mate link travel time with different parameters.
2.2 Fuzzy Control Systems
FCSs work on linguistic terms and partial member-
ships which are able to express fuzziness. A FCS
takes crisp input values and fuzzifies them with the
help of membership functions. In a second step, a rule
base provides the basis for the inference mechanism.
A defuzzification generates crisp and continuous out-
put values.
The idea of Fuzzy Control was first introduced by
Mamdani and Assilian (1975) for a steam engine and
boiler combination. Since then, Fuzzy Control has
been applied successfully in various research areas:
in the environmental research e.g. for flood simulation
Wang et al. (2011), in remote sensing e.g. for classi-
fication of multispectral data Shackelford and Davis
(2003) or in analytic chemistry Hayward and David-
son (2003). Das and Winter (2018) employ fuzzy
logic to detect the transport mode in an urban envi-
ronment.
Fuzzy Control allows for many input and many
output parameters. Such parameters can be combined
in an if-then rule Jantzen (2007). The two great-
est strengths of fuzzy control are the ability to rea-
son with uncertainty and its utilization in complex ill-
defined processes without much knowledge of their
underlying dynamics Mahmoud (2018).
3 DATASETS
To create and evaluate a FCS, both input and reference
data are required. The input dataset consists of two
datasets: OSM and SRTM. The reference data for the
Fuzzy Control System is provided by the GD-API. In
the following section the input and reference data are
described.
3.1 Input Data
OpenStreetMap road data includes a hierarchic clas-
sification of the road network that is described in Ta-
ble 1. The mentioned road classes and their respec-
tive link roads (meaning roads that lead to or from
the respective road) build up the road network. Other
existing road classes, such as residential and service
roads or special road types like living streets, are not
considered.
The Shuttle Radar Topography Mission was
a joint mission by National Imagery and Mapping
Agency and the National Aeronautics and Space Ad-
ministration (NASA) to collect an open source global
elevation dataset. We use the SRTM void-filled, 1 arc-
Fuzzy Estimation of Link Travel Time from a Digital Elevation Model and Road Hierarchy Level
17
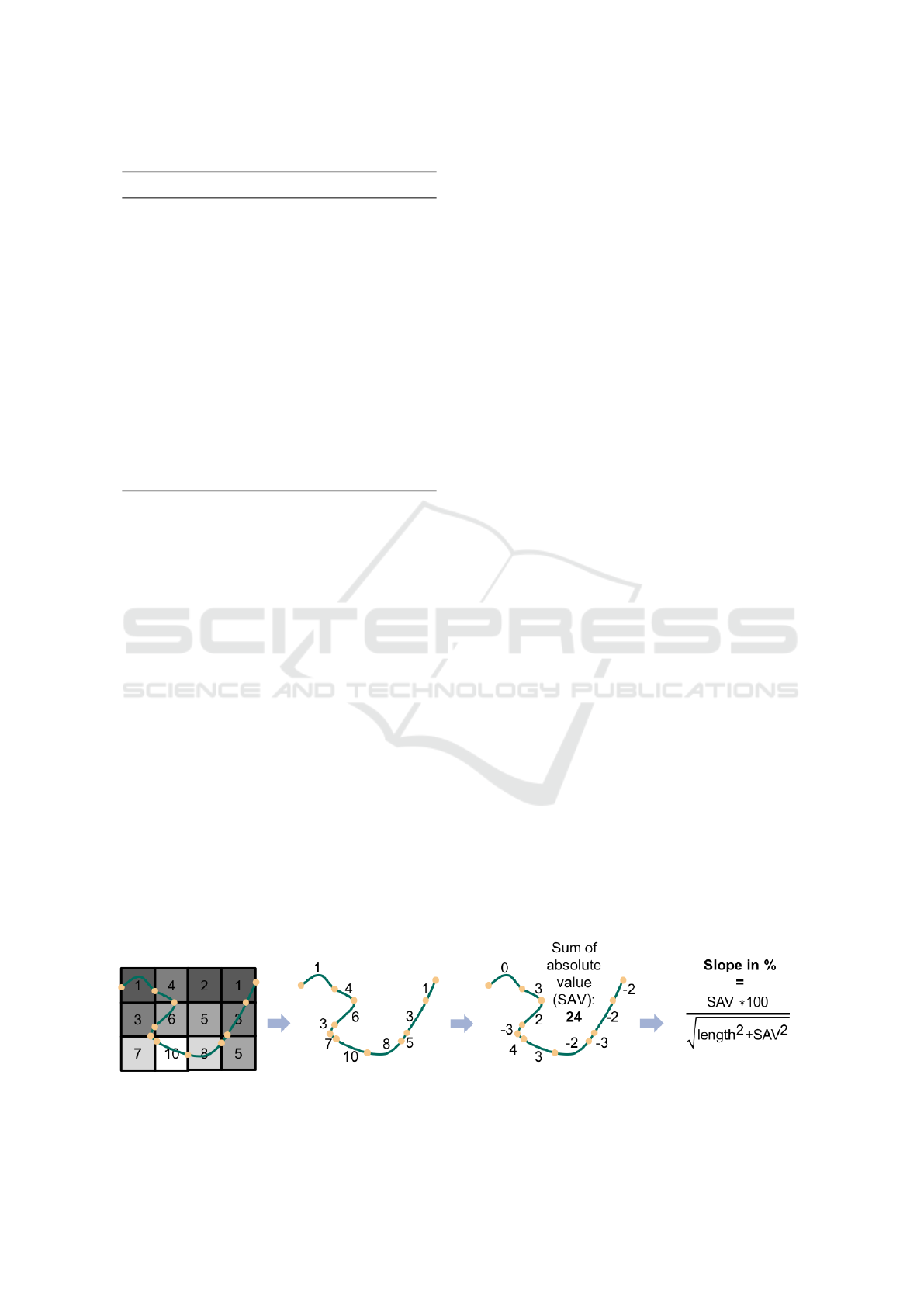
Table 1: Road Classes in the OSM road network.
Road Class Description
Motorway Restricted access, major divided
highway.
Trunk Most important roads in a coun-
try’s system that are not motor-
ways.
Primary Major highways, linking large
towns.
Secondary Highways, not part of a major
route, form a link in the national
route network, often link towns.
Tertiary Connect smaller settlements and
minor streets to more major
roads.
Unclassified Minor public roads, lowest level
of the network, often link vil-
lages and hamlets.
second global data NASA and USGS (2013) with a
resolution of approximately 30 m.
Due to this resolution, it has to be taken into ac-
count that one pixel of the SRTM raster may be the
average of the road itself as well as possible hills be-
side that road. Therefore, we consider the slope of the
surrounding terrain, which is, in most cases, higher
than the actual road slope.
3.2 Reference Data
The Google Directions API is a service that calcu-
lates routing directions and travel times between lo-
cations. GD-API data includes the distance in meter,
the travel time in seconds with and without traffic at a
given time and the coordinates of the points on a road
closest to the input point coordinates.
The GD-API relies on Google Maps and its un-
derlying road and traffic data. The quality of Google
Maps data is difficult to assess, especially in develop-
ing countries. During our studies, both roads that ex-
ist in OSM and not Google Maps and vice versa have
been detected. Cipeluch et al. (2010) compare the ac-
curacy of Bing Maps, OSM data and Google Maps
data in Ireland and their results support our observa-
tions. They found that although some areas are better
served by one data source than by the others, no sin-
gle data source proves to have better overall coverage.
As for the travel time and traffic data, there is no data
available to evaluate the quality of Google Maps. We
employ GD-API travel time as reference data while
keeping in mind that this might, in some cases, be un-
true.
The GD-API data is split into a dataset for tuning
the model and a dataset used to validate the model.
The tuning subset contains about 1000 roads and is
randomly selected to display a representative subset
of the complete dataset. The representative tuning
subset contains the same kilometer percentage of ev-
ery OSM road class like the entire dataset. The vali-
dation subset excludes the data used to tune the subset
and consists of 5000 representative roads.
4 METHODS
This section is divided in two parts. First, two ap-
proaches to derive road slope from a DEM are pre-
sented. Afterwards a FCS is set up, tuned and vali-
dated. The road slope value calculated in the first part
of the sections serves as input for the FCS in the sec-
ond part.
4.1 Slope Calculation
We compare two approaches to derive the slope of the
road from the DEM. As mentioned in Section 3 both
approaches calculate a mix of road slope and terrain
slope rather than the exact road slope due to the reso-
lution of the DEM dataset. With this in mind we refer
to the results as road slope in the following.
In the first approach, referred to as Slope Ap-
proach 1 (SA-1), a slope percentage raster is created
from the original DEM by applying the Horn algo-
Figure 2: Schema of the SA-2 to calculate road slope directly of the DEM. The numbers of the grid cell symbolize the hight
values of the terrain (in meter). In the equation length means the road segment length.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
18

rithm Horn (1981). Then, the OSM road network is
overlaid with the slope raster. Every road segment in-
tersects multiple pixels of the slope raster. The aver-
age of all intersecting pixels is assigned as road slope
value to the road segment.
The second approach is herein referred to as Slope
Approach 2 (SA-2) and is visualized in Figure 2.
First, the OSM road network is overlaid with the
DEM raster. Every road segment is cut in smaller
pieces by the 30 m raster pixels of the DEM. Then, the
height difference of every road segment to the road
segment before is calculated. The absolute value of
these differences along the original road segment is
summed up. Finally, the slope of the road in percent
Crisp Input
Fuzzification
(Membership functions)
Inference
mechanism
Rule
base
Defuzzification
Crisp Output
Fuzzy controller
Hierarchy level
& Slope
Velocity
1
3
4
2
Figure 4: Schema of the Fuzzy Control System.
is calculated according to the equation in the last step
of Figure 2.
4.2 Developing a Fuzzy Control System
We develop a FCS that calculates the velocity with the
two road parameters hierarchy level and road slope.
In the following section, a methodology to construct,
tune and validate a FCS is presented. A schema of the
applied FCS is presented in Figure 4.
4.2.1 Setup of the FCS
Road hierarchy level and road slope serve as input pa-
rameters to calculate the velocity by car and the travel
time, subsequently. Fuzzy logic introduces the con-
cept of partial membership. In a classical or crisp
set, members of a crisp set would only be members
if their membership was full or complete. In fuzzy
sets, however, elements can have varying degrees of
membership Mahmoud (2018). Membership func-
tions that are defined on an interval of 0 (not a mem-
ber) to 1 (full member) characterize the membership
of the three parameters slope, hierarchy level and ve-
locity (see Figure 3). Linguistic terms for road hier-
archy range from very low to very high and serve as a
fuzzification of the classes in Table 1. The terms for
slope include level, rolling, mountainous and steep.
The output parameter velocity varies from very slow
to very fast. The membership functions convert crisp
input and output values into fuzzy sets (Figure 4, Step
1).
We use a Mamdani fuzzy inference system Mam-
dani and Assilian (1975) which has a rule base where
every rule contains an antecedent (IF) part and a con-
sequent (THEN) part (Figure 4, Step 2). Antecedent
Figure 3: Membership functions of the parameters (a) Slope, (b) Hierarchy level and (c) Velocity.
Fuzzy Estimation of Link Travel Time from a Digital Elevation Model and Road Hierarchy Level
19
and consequent variables can be aggregated using
an AND-operator. The rule base and the membership
functions for this FCS are build based on the design
standards of Asian highway routes Behera (2008).
These design standards are transferable to Chile as
they describe similar road characteristics. A slightly
lower velocity was assumed as Behera (2008) de-
scribes speed limits and not actual travel speed. 19
rules have been developed with two antecedents and
one consequent each. Two exemplary rules are:
• IF slope is level AND road hierarchy level is very
high THEN velocity is very fast.
• IF slope is mountainous AND road hierarchy level
is very low THEN velocity is slow AND very slow
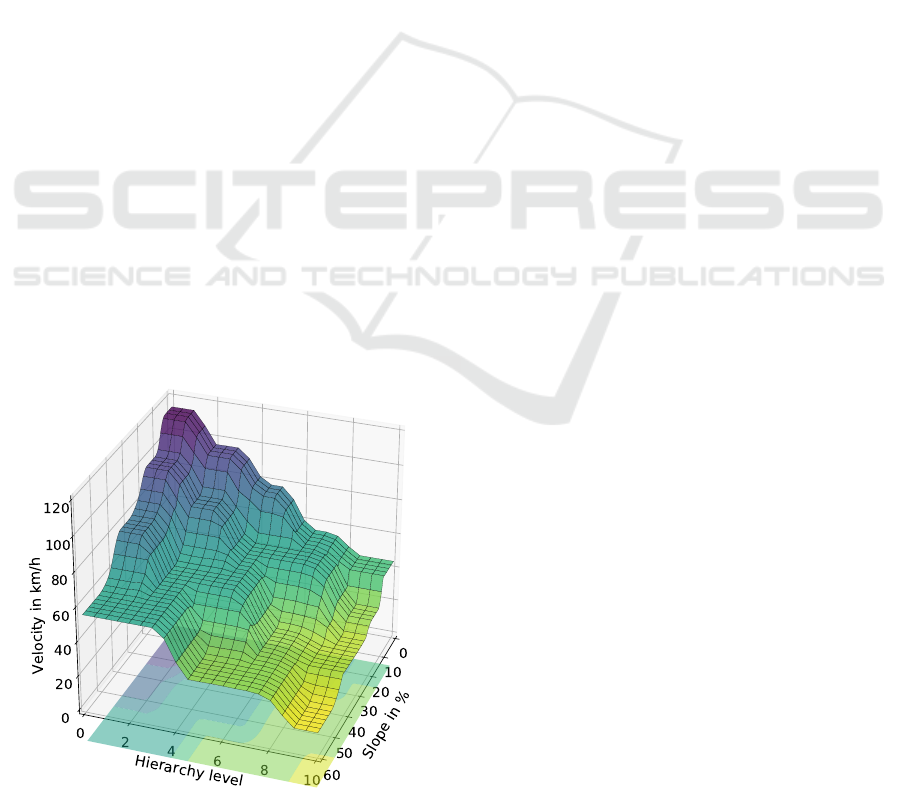
The final step of a FCS is the defuzzification
(Figure 4, Step 4) which converts fuzzy output to
crisp output. We tested several defuzzification meth-
ods like centroid, bisector and mean-, minimum- and
maximum- of maximum. A centroid-based defuzzi-
fication (see Mahmoud (2018)) fits our problem best,
as it results in a more smooth distribution. The output
of the initial FCS is illustrated in Figure 5.
4.2.2 Model Tuning
In order to adapt the initial FCS to produce better out-
puts, the output is compared to data generated by the
GD-API. As described in section 3.2, a subset of ap-
proximately 1000 roads is used to tune the FCS.
Some obstacles exist when comparing the output
of the FCS to the GD-API output. As mentioned in
Section 3, both the Google data and the OSM data
Figure 5: Fuzzy Control System.
may contain errors. Furthermore, as the GD-API al-
ways takes the shortest path, it may take a different
path between the two input coordinates than the road
from which we want to compare the velocity. Also,
the output of travel time of the GD-API is whole sec-
onds. Therefore, short road segments with a travel
time of only few seconds may be less accurate due to
rounding. An exemplary output from the GD-API of
4 s for a 100 m road segment can signify a velocity of
81 km/h (for 4.4 s) or 102 km/h (for 3.5 s).
Four types of possible errors or large inaccuracies
are captured automatically and are excluded of the
comparison:
• the distance between either the start or the end
points on the road in OSM and in Google is larger
than 50 m;
• the lengths of the road in OSM and in Google dif-
fer in more than 20 %;
• the road is shorter than 200 m;
• the request to the GD-API returns an error or an
empty result set.
The FCS is tuned with the knowledge gained by
the comparison with the GD-API. The membership
functions and the defuzzification methods are not
changed. Only the rule base is adapted to better fit
the tuning subset.
4.2.3 Validation
Finally, the data is validated with the GD-API. The
validation subset with approximately 5000 roads is
used to validate the FCS (see Section 3.2). Possible
errors described above are deleted from the validation
subset and evaluated to obtain the error statistics.
5 CASE STUDY, RESULTS AND
DISCUSSION
5.1 Study Region
The model is applied exemplary for the BioB
´
ıo region
in central Chile. The road infrastructure of Chile is
typical of a developing country. The upper level road
network mainly consists of paved roads. But a lot of
minor roads in the category of tertiary roads or un-
classified roads are gravel or even mud roads. The
BioB
´
ıo region has a characteristic topography with
the coastal mountain range in the west and the An-
des in the east. Large areas of the region are rural
and not densely populated. This makes the region an
ideal candidate to apply the developed FCS. It offers
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
20

Figure 6: Road segment length in OSM.
a wide range of hierarchy levels and slopes. Further-
more, only 2.6 % of the roads in Chile (5.5 % of the
kilometers in the network) have corresponding speed
information in OSM, which underlines the need to
calculate velocity from another source.
The OSM data for the BioB
´
ıo region consists of
about 14040 km of road network. The road network
is classified as follows: 53 % tertiary roads, 18 % un-
classified roads, 12 % primary roads, 10 % secondary
roads, 6 % motorways and 1 % trunks. Figure 6 il-
lustrates the distribution of road segments of specific
lengths: once in relation to the number of roads and
once in relation to the kilometers in the road network.
This figure states clearly that there are many road seg-
ments shorter than 200 m. But their percentage in
respect to the kilometers in the road network is low
which renders them insignificant.
Before applying the FCS, the hierarchy level of
every road class in the region has to be assigned. The
fuzzy input hierarchy level ranges from 0 (very high)
to 10 (very low). Based on expert knowledge, roads
were assigned the following values: motorways 1.8,
trunks 4.3, primary roads 5, secondary roads 7, ter-
tiary roads 8.7 and unclassified roads 10. The hierar-
chy levels have to be chosen for every region while
taking into account its specific level of infrastructure
development.
5.2 Results
The initial FCS achieves an R
2
of 89.3 % for the SA-
1 and 87.8 % for the SA-2 (see Table 2). The FCS
performs best for motorways, followed by unclassi-
fied roads. The tuned FCS reaches a slightly higher
R
2
of 89.5 % for the SA-1 and 88.3 for the SA-2. The
road classes motorway and unclassified decrease their
R
2
in the tuned FCS slightly while the others perform
better.
Figure 7 shows the deviation percentage from
GD-API seconds of the kilometer-wise largest road
classes tertiary, unclassified and primary for the initial
(left) and for the tuned (right) FCS. Negative percent-
ages signify that the FCS estimates lower travel times
than the GD-API. With the initial FCS (Figure 7, left),
the estimated travel time is generally lower than the
one of the GD-API. With the tuned FCS (Figure 7,
right), the average and median of the deviation per-
centage is around zero for all road classes and most of
the data ranges from −25 % to 25 %. The interquar-
tile range of the results of the tuned FCS is wider
than with the initial FCS. Furthermore, the interquar-
tile range and the total range is generally smaller for
the SA-2 than for the SA-1. The deviation percentage
of the SA-1 is, in most cases, slightly larger than for
SA-2.
A map of the deviation percentage with the tuned
FCS and SA-1 is illustrated in Figure 8. The deviation
percentage in the central plains of the study region is
larger than in the coastal mountain range in the west.
In the center of the region, link travel times that are
underestimated by the FCS (dark red) and link travel
times that are overestimated by the FCS (dark blue)
are often spatially close to each other. This also oc-
curs more often near urban centers. Within the urban
centers, the FCS mostly calculates lower travel times
than the GD-API.
Of the 5023 roads considered for validation, ap-
proximately 13 % were excluded due to the errors de-
scribed in section 4.2.2. The errors occurred when
the road distance between the OSM and the GD-API
data differed in more than 20 % (50 % of the errors)
and when the start or endpoints differ in more than
50 m (46 % of the errors). In 17 cases the GD-API
Table 2: R
2
in % for the initial and for the tuned FCS and for both slope calculation methods.
Motorway Trunk Primary Secondary Tertiary Unclassified Total
Initial
SA-1 98.0 76.0 81.1 87.1 88.1 89.5 89.3
SA-2 97.7 78.0 82.2 85.0 88.3 88.2 87.8
Tuned
SA-1 97.8 78.5 83.0 89.6 89.1 89.0 89.5
SA-2 97.5 80.1 83.7 86.3 88.6 87.4 88.3
Fuzzy Estimation of Link Travel Time from a Digital Elevation Model and Road Hierarchy Level
21

Figure 7: Deviation percentage of the three largest road classes in the initial (left) and in the tuned FCS (right) and respectively
for both slope calculation methods.
Figure 8: Map of deviation percentage in the tuned model with SA-1. If the percentage is negative (yellow - red), the calculated
travel time is lower than the reference travel time of the GD-API.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
22

responded with an error, for 5 roads it gave an empty
result.
5.3 Discussion
Two approaches to calculate road slope from a DEM,
presented in Section 4.1, are applied within the scope
of this paper. The initial expectation was that SA-
2 performs better because it approximates the actual
road slope more accurately by considering only the
pixels of the DEM that the road intersects. In contrast,
the SA-1 calculates the slope by including neighbour-
ing pixels on all sides, thus including possible hills
beside the road. When comparing both approaches,
the results are surprising: the FCS with SA-1 per-
forms slightly more accurate, both regarding the R
2
and regarding the deviation percentage. But, as the
interquartile range and the total range of the data is
smaller in the SA-2, the SA-2 is more precise while
less accurate than SA-1.
Regarding the R
2
of the initial FCS versus the
tuned FCS, the improvement is insignificant. From
the deviation percentage (see Figure 7) we gather that
the accuracy increases significantly in the tuned FCS.
However, the precision decreases as the interquartile
range and the total range widens. When applying the
generated travel times for routing, the choice of FCS
is dependent on the requirements of the application.
The initial FCS should be chosen if an overestimation
of travel time needs to be avoided. If a more accurate
result is desired and a possible overestimation is of lit-
tle consequence, we suggest the tuned FCS. For com-
plete routes, road segments are summed up and posi-
tive and negative deviations from the GD-API nearly
cancel each other out.
For some road classes, the FCS performs better
than for others. Motorways are estimated with a very
high R
2
(>97.5 %). A motorway features a mostly ho-
mogeneous velocity and little slope variation and the
class contains little variety within. Both aspects facil-
itate the estimation of travel time. On the other side,
primary roads represent a very inhomogeneous class
with some roads having two lanes and others that are
only just asphalted. This poses a challenge to the FCS
which is recognizable by the lower R
2
and the high
interquartile range. The two largest road classes ter-
tiary and unclassified are underestimated in the initial
FCS. Probably this results from the fact that road con-
ditions of the lower road classes in Chile are worse
than expected. The road class trunk has the lowest R
2
value which is due to the fact that this road class is
very uncommon in Chile. Roads that are classified as
trunks in other countries are probably tagged as pri-
mary roads in Chile.
The presented fuzzy estimation of link travel time
is designed for rural application. In urban and sub-
urban regions traffic, number of turns or local speed
limits play a much bigger role for the estimation of
travel time than slope and hierarchy level. Therefore,
travel times in urban centers estimated with the devel-
oped FCS should be treated with caution.
To tune and to validate the FCS, GD-API data is
applied. As mentioned in Section 3.2 some differ-
ences exist between the Google Maps data and the
OSM data. The error statistics emphasize this issue.
Some errors can not be caught and are treated as ref-
erence data which falsifies the tuning and the valida-
tion. Thus, the GD-API data is only suitable to some
extend as valid reference data. However, other ref-
erence datasets that are readily available and feature
worldwide coverage do not exist.
6 CONCLUSIONS
We develop a FCS to estimate link travel time from
the two parameters road slope and road hierarchy
level. The open source and worldwide available
datasets OSM and SRTM serve as input data. The
FCS is validated with GD-API data. An exemplary
application on a case study for the BioB
´
ıo region in
Chile is performed successfully.
The developed FCS offers the advantages of
Fuzzy Control. It includes fuzzy input parameters and
a reasoning process of a human operator. Both enable
a relatively clean and fast design process. Especially
in comparison to the common use of fixed speed pro-
files, a FCS produces a more continuous output. In
contrast to machine learning approaches, training data
is not needed as it is based on expert knowledge. For
our FCS this is a crucial benefit as real training data
is unavailable. However, it has to be considered that
the ability of a FCS to perform well, highly depends
on its design. A FCS is much more susceptible to
false assumptions than for example a machine learn-
ing model would be.
The findings of this study can be used in many dif-
ferent applications. Most routing engines could ben-
efit from the introduction of Fuzzy Control to com-
bine their various input parameters in order to obtain
a more continuous output. Furthermore, road slope
could also be included as one of these input parame-
ters to improve the accuracy in rural regions for these
routing engines. Many studies on critical road infras-
tructure rely on commercial travel time data as a cost
factor in the road network. They could benefit very
much from estimated link travel times in rural regions.
The fuzzy estimation of link travel time has great
Fuzzy Estimation of Link Travel Time from a Digital Elevation Model and Road Hierarchy Level
23

potential for future development. A FCS can take
multiple input parameters so that more of the exist-
ing metadata in OSM could be included in the speed
calculation. Also, the sinuosity of a road is a big influ-
encing factor on link travel time and could be an addi-
tional input parameter. In order to state which of the
presented slope calculation approaches is to be used
in which cases, further analyses in many different
study areas are needed. Another inquiring approach
could be to combine our proposed fuzzy methodol-
ogy with approaches like machine learning. A neuro-
fuzzy system could improve the estimations of the
FCS using appropriate reference data.
ACKNOWLEDGEMENTS
We thank Prof. Dr.-Ing. Stefan Hinz head of the In-
stitute of Photogrammetry and Remote Sensing at the
Karlsruhe Institute of Technology for the funding of
this work.
REFERENCES
Barrington-Leigh, C. and Millard-Ball, A. (2017). The
world’s user-generated road map is more than 80%
complete. PLOS ONE, 12(8):1–20.
Behera, S. K. (2008). Connecting India’s North East with
Bangladesh: a study of transport linkages. PhD the-
sis, Scholl of International Studies, Jawaharlal Nehru
University, India.
Brabyn, L. and Skelly, C. (2001). Geographical Access to
Services, Health (GASH): Modelling Population Ac-
cess to New Zealand Public Hospitals. In The 13
th Annual Colloquium of the Spatial Information Re-
search Centre, page 11, Dunedin, New Zealand.
Cipeluch, B., Jacob, R., Winstanley, A., and Mooney,
P. (2010). Comparison of the accuracy of Open-
StreetMap for Ireland with Google Maps and Bing
Maps. In In Proceedings of the Ninth International
Symposium on Spatial Accuracy Assessment in Natu-
ral Resuorces and Enviromental Sciences, page 4, Le-
icester, UK.
Collischonn, W. and Pilar, J. V. (2000). A direction depen-
dent least-cost-path algorithm for roads and canals.
International Journal of Geographical Information
Science, 14(4):397–406.
Das, R. D. and Winter, S. (2018). A fuzzy logic based trans-
port mode detection framework in urban environment.
Journal of Intelligent Transportation Systems, pages
1–12.
Demetriou, D. (2016). Uncertainty of OpenStreetMap data
for the road network in Cyprus. In Themistocleous,
K., Hadjimitsis, D. G., Michaelides, S., and Papa-
david, G., editors, Fourth International Conference on
Remote Sensing and Geoinformation of the Environ-
ment.
Dorn, H., T
¨
ornros, T., and Zipf, A. (2015). Quality Evalu-
ation of VGI Using Authoritative Data – A Compari-
son with Land Use Data in Southern Germany. ISPRS
International Journal of Geo-Information, 4(3):1657–
1671.
Girres, J.-F. and Touya, G. (2010). Quality Assessment of
the French OpenStreetMap Dataset: Quality Assess-
ment of the French OpenStreetMap Dataset. Transac-
tions in GIS, 14(4):435–459.
Haklay, M. (2010). How Good is Volunteered Geo-
graphical Information? A Comparative Study of
OpenStreetMap and Ordnance Survey Datasets. En-
vironment and Planning B: Planning and Design,
37(4):682–703.
Hayward, G. and Davidson, V. (2003). Fuzzy logic applica-
tions. Analyst, 128:3.
Horn, B. (1981). Hill shading and the reflectance map. Pro-
ceedings of the IEEE, 69(1):14–47.
Jackson, S., Mullen, W., Agouris, P., Crooks, A., Croitoru,
A., and Stefanidis, A. (2013). Assessing Complete-
ness and Spatial Error of Features in Volunteered Ge-
ographic Information. ISPRS International Journal of
Geo-Information, 2(2):507–530.
Jantzen, J. (2007). Foundations of Fuzzy Control. John
Wiley & Sons, Ltd, Chichester, UK.
Knoop, V. L., Snelder, M., van Zuylen, H. J., and Hoogen-
doorn, S. P. (2012). Link-level vulnerability indica-
tors for real-world networks. Transportation Research
Part A: Policy and Practice, 46(5):843–854.
Li, X., Zhao, Z., Zhu, X., and Wyatt, T. (2011). Covering
models and optimization techniques for emergency re-
sponse facility location and planning: a review. Math-
ematical Methods of Operations Research, 74(3):281–
310.
Ludwig, I., Voss, A., and Krause-Traudes, M. (2011). A
Comparison of the Street Networks of Navteq and
OSM in Germany. In Advancing Geoinformation Sci-
ence for a Changing World, pages 65–84. Springer,
Berlin, Heidelberg.
Luxen, D. and Vetter, C. (2011). Real-time routing with
OpenStreetMap data. In Proceedings of the 19th ACM
SIGSPATIAL International Conference on Advances
in Geographic Information Systems - GIS ’11, page
513, Chicago, Illinois. ACM Press.
Mahabir, R., Stefanidis, A., Croitoru, A., Crooks, A., and
Agouris, P. (2017). Authoritative and Volunteered
Geographical Information in a Developing Coun-
try: A Comparative Case Study of Road Datasets in
Nairobi, Kenya. ISPRS International Journal of Geo-
Information, 6(1):24.
Mahmoud, M. S. (2018). Fuzzy Control, Estimation and
Diagnosis. Springer International Publishing, Cham.
Mamdani, E. H. and Assilian, S. (1975). An experiment in
linguistic synthesis with a fuzzy logic controller. In-
ternational Journal of Man-Machine Studies, 7(1):1–
13.
NASA and USGS (2013). Shuttle Radar To-
pography Mission. 1 Arc second void-filled.
https://earthexplorer.usgs.gov. Downloaded 25
May 2018.
GISTAM 2019 - 5th International Conference on Geographical Information Systems Theory, Applications and Management
24

Neis, P., Zielstra, D., and Zipf, A. (2011). The Street
Network Evolution of Crowdsourced Maps: Open-
StreetMap in Germany 2007-2011. Future Internet,
4(1):1–21.
ORS (2018). OpenRouteService: The spatial services api
with plenty of features. https://openrouteservice.org/.
Accessed 30 November 2018.
OSM Wiki (2016). Using OpenStreetMap: OpenStreetMap
Wiki. http://wiki.openstreetmap.org/. Accessed 25
November 2018.
OTP (2018). OpenTripPlanner – Multimodal Trip Plan-
ning. http://www.opentripplanner.org/. Accessed 30
November 2018.
Scott, D. M., Novak, D. C., Aultman-Hall, L., and Guo, F.
(2006). Network Robustness Index: A new method
for identifying critical links and evaluating the perfor-
mance of transportation networks. Journal of Trans-
port Geography, 14(3):215–227.
Shackelford, A. and Davis, C. (2003). A combined fuzzy
pixel-based and object-based approach for classifica-
tion of high-resolution multispectral data over urban
areas. IEEE Transactions on Geoscience and Remote
Sensing, 41(10):2354–2364.
Stanojevic, R., Abbar, S., and Mokbel, M. (2018). W-
edge: weighing the edges of the road network. In Pro-
ceedings of the 26th ACM SIGSPATIAL International
Conference on Advances in Geographic Information
Systems - SIGSPATIAL ’18, pages 424–427, Seattle,
Washington. ACM Press.
Steiger, E., Rylov, M., and Zipf, A. (2016).
Echtzeitverkehrslage basierend auf OSM-Daten
im OpenRouteService. AGIT Journal, 2:264–267.
Wang, X. J., Zhao, R. H., and Hao, Y. W. (2011). Flood
Control Operations Based on the Theory of Vari-
able Fuzzy Sets. Water Resources Management,
25(3):777–792.
YOURS (2018). YourNavigation - Worldwide routing on
OpenStreetMap data. http://yournavigation.org. Ac-
cessed 30 November 2018.
Fuzzy Estimation of Link Travel Time from a Digital Elevation Model and Road Hierarchy Level
25
