
A MARTE-Based Design Pattern for Adaptive Real-Time Embedded
Systems
Ahmed Ben Mansour, Mohamed Naija and Samir Ben Ahmed
El Manar University, Faculty of Mathematical, Physical and Natural Sciences of Tunis Manar, Tunisia
Keywords:
Adaptability, Real-time & Embedded Systems, MDE, MARTE, Design Patterns.
Abstract:
The design of adaptive real-time & embedded systems (RTES) is a hard task due to the complexity of both soft-
ware/hardware features and the variability in the operational environment. This paper presents a new design
pattern intended to support and facilitate the co-modeling and scheduling analysis of RTES. The contribution
of this pattern is that is designed to i) support scheduling analysis allowing adaptation mechanisms ii) model
all the software/hardware features and allocation in the same view iii) annotate the system with functional
and non-functional properties using a high-level modeling language. The generated model from the pattern
contains all the needed information to perform the schedulability tests. As a proof of concepts, we present
experimental results for an automobile system.
1 INTRODUCTION
The modeling of Real-Time Embedded Systems
(RTES) may be stated as a crucial problem in the
software engineering domain with the current lack
of design models and tools. RTES are subject to a
multitude of constraints (e.g., battery, temperature)
and real-time requirements, and have to execute in
a highly variable environment (e.g., update avail-
able, hardware crash, position change). To retain the
system non-functional properties (NFPs) (e.g., dead-
lines), RTES must be able to adapt themselves to the
changes in their operating environment and context.
Lightening the task of adaptive systems designers and
reducing the development cost and time to market
represents a significant challenge in the field, which
requires the use of high-level approaches such as
MDE (Model Driven Engineering) (Schmidt, 2006)
and MARTE (Modeling and analysis of real-time em-
bedded systems) (OMG, 2008).
MDE is a way to beat the growing complexity
of adaptive systems by allowing reuse, portability,
and automation of the design models. In particular,
pattern-based development is becoming an increas-
ingly recognized solution in software engineering by
addressing new challenges to support the whole life-
cycle co-design of complex systems. In the RTES do-
main, its adoption is seen promising for several pur-
poses: allowing the reuse of models (Rohnert and
Stal, 1996), improving software process quality and
reducing the development cost of complex systems.
Design pattern development is a relatively old dis-
cipline that has been proven to be beneficial for get-
ting fast and reusable designs (Gamma, 1995). Un-
fortunately, most of the patterns that are devoted to
adaptive systems are expressed as informal indica-
tions on how to solve some adaptive mechanisms.
These patterns do not include sufficient semantic de-
scriptions, including those of adaptability concepts,
for automated processing and to extend their use. For
that, MDE can provide a solid basis for formulating
design patterns that can incorporate adaptability con-
cepts at several levels of abstraction.
In the present paper, we propose a design pat-
tern intended to guide the designer in the modeling
of adaptive real-time embedded systems. It repre-
sents a generic illustration backing the co-modeling
of features to be used in the context of modeling
adaptability and analysis time constraint in the real-
time embedded systems. This work is the result of
previous investigations and published work. Start-
ing from (Naija et al., 2015) a MARTE-based ap-
proach was proposed to concurrency model construc-
tion at early design stages. Notably, we perceive a
MARTE semantics limitation in modeling level. Ac-
cordingly, we have identified the needed of the new
version of the MARTE profile supporting adaptation
mechanisms. In (Naija et al., 2016) and (Naija and
Ahmed, 2016a) we have proposed several extensions
in the UML MARTE profile for supporting adapta-
242
Ben Mansour, A., Naija, M. and Ben Ahmed, S.
A MARTE-Based Design Pattern for Adaptive Real-Time Embedded Systems.
DOI: 10.5220/0007673102420248
In Proceedings of the 14th International Conference on Evaluation of Novel Approaches to Software Engineering (ENASE 2019), pages 242-248
ISBN: 978-989-758-375-9
Copyright
c
2019 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
tion mechanisms. In this paper, we present how to
use these extensions in a new design pattern.
Our contribution is to be integrated into a model-
based approach to guide RTES designers for build-
ing and analysing adaptive RTES models. It facili-
tates complex systems modeling, decreases the devel-
opment time and cost and increases software process
quality. The above benefits have been demonstrated
through the application of our proposition to an adap-
tive system.
The remainder of this paper is organized as fol-
low. In Section II, we give background on related
concepts to the present article. Section III provides
a survey of some similar works. In Section IV, we
present an overview of the proposed design pattern.
Section V submits a case study application of the sug-
gested design pattern. Finally, this paper is concluded
with some outlined directions for future works.
2 THEORETICAL BACKGROUND
In this section, we present enough information about
UML MARTE profile and adaptability concepts to
understand how and why we use them in our design
pattern.
2.1 UML/MARTE
The UML/MARTE profile (Modeling and Analysis of
Real-Time and Embedded systems) (OMG, 2008) de-
fines a framework for annotating functional and non-
functional properties of embedded systems. MARTE
fosters the building of models that support the spec-
ification of scheduling analysis problem. This pro-
file can model tasks, dependencies between them and
events under shape a Workload Behavior and platform
of the system.
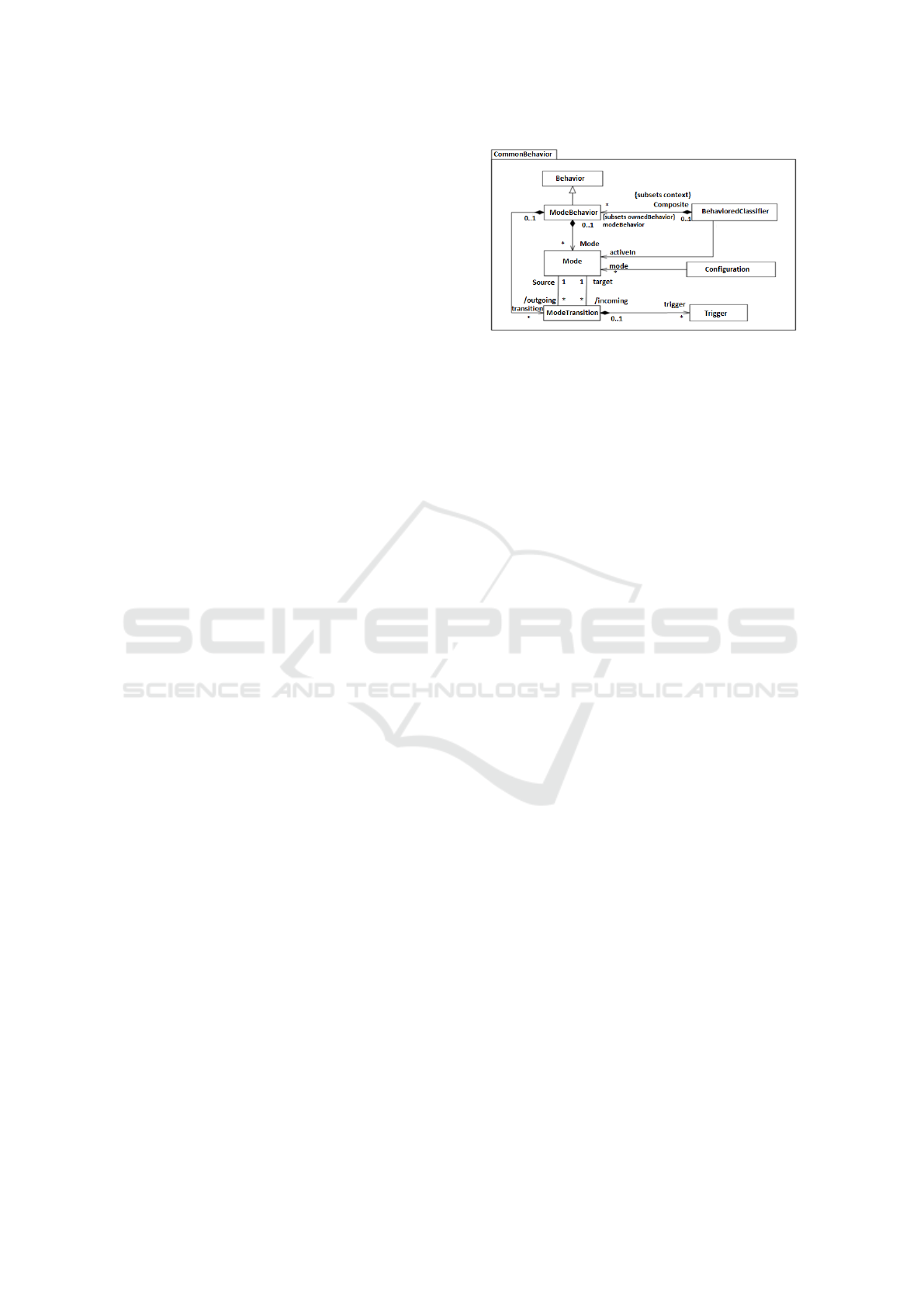
In particular, the Core Elements sub-profile of
MARTE Foundations package defines the elements
needed to specify configurations, modal behavior and
their semantics of execution, as shown in Figure 1.
The modal behavior is strongly related to the no-
tion of mode, which can represent a state of the sys-
tem in which it must provide a set of features. The
mode is the abstract representation of a set of func-
tionalities afforded by a system or a subsystem. When
adapting to new operational requirements, a system
may have (i) to change from a source mode to a tar-
get mode, and (ii) to improve the software applica-
tion configuration (e.g., by disabling or enabling com-
munication links between components). This design
model is used at runtime.
Figure 1: Modal behavior model of MARTE (OMG, 2008).
However, mutually exclusive modes are described
from the ModeBehavior model to clarify that only one
mode between them can be triggered at the same time.
Besides, an operational mode is characterized by a
given configuration. This configuration is defined by
the allocation of all the elements of the software ar-
chitecture to the platform components. The transition
mode describes the mode change of a system. The
latter is invoked in response to an event that marks a
change in the execution context. Various criteria must
be considered in the context of adaptive real-time &
embedded systems during the specification of the de-
sign pattern. Indeed, we must take into considera-
tion the different tasks features, execution modes, and
tasks/process execution, etc. MARTE does not enable
designers to encapsulate all these specifications in the
same model.
2.2 Adaptability
There are several definitions of adaptation in the lit-
erature. In our previous work (Naija et al., 2016), we
defined adaptation as any modification in the struc-
ture, behavior or architecture of the system to accom-
modate the external or internal change of their oper-
ating environment or context and according to pre-
defined adaptation plan and rules (Naija and Ahmed,
2016b). In the adaptive system, additional informa-
tion has to be modeled such as adaptation rules, con-
text, transitional modes and adaptation plan to specify
both functional and non-functional properties. In the
following, we explain, the concepts of context, rules
and adaptation plan:
• Context: annotate the minimal representation of
the operational environment which is attached to
the functional mode.
• Rules: specify how the system should be adapted
to the new environment requirements.
• Adaptation Plan: is the process of taking ac-
tion to manage or reduce the consequences of a
changed configuration.
A MARTE-Based Design Pattern for Adaptive Real-Time Embedded Systems
243

3 RELATED WORKS
The design of adaptive RTES is relatively old domain
and thus very rich. Unfortunately, this task presents
a challenge due to the complexity of the problem it
handles (Said et al., 2014). In this paper, we fo-
cus on approaches and design flows that mainly deal
with high-level design and verification of adaptive
systems, which are still not well tackled.
In (Said et al., 2014), the authors have proposed
five patterns representing generic modeling of the
adaptation loop modules. The patterns take into con-
sideration the real-time features of adaptation opera-
tion. These design patterns are presented in the static
view through class diagrams annotated with MARTE
profile stereotyped. The adaptation is then considered
as a dynamic and partial change of the operation mode
without supporting platform resources.
In the same vein, (Ramirez and Cheng, 2010)
have proposed several patterns to design adapta-
tion process. However, the authors introduced
adaptation-oriented design patterns to support moni-
toring, decision-making, and reconfiguration of adap-
tive systems. They extend the pattern templates
used by Gamma et al. (Gamma, 1995) for descrip-
tion design patterns with Behavioral and Constraints
fields. Unfortunately, real-time constraints allowing
the scheduling test, which is an ad-hoc test, are not
modeled.
The authors have proposed in (Supriana et al.,
2018), an approach through requirements modeling
languages directed to adaptation pattern. The model
is prepared through contextual conditions approach
that is integrated into MAPE-k (monitor analyze,
plan, execute - knowledge) pattern in goal-oriented
requirements engineering.
The author in (Hamerski et al., 2018) has intro-
duced a middleware to support the development of
self-adaptive management services and applications
for MPSoCs. The proposed middleware is heavily
based on object-oriented practices and design patterns
to present platform abstraction, modular design, and
decoupled distributed programming model. However,
the author discusses many import features of real-time
embedded systems such as performance and time con-
straint without taking into consideration the interac-
tion between the different components.
In (Abuseta and Swesi, 2015) a MAPE loop
(Monitor, Analyzer, Plan and Execute) design pro-
cess is proposed. However, the authors discuss the
interaction between the different components of the
loop without taking into consideration the essential
features of RTES, such as time constraint, scheduling
resource, etc.
Other efforts have been specifically tailored to
the partitioned and the global approaches. In
(Magdich et al., 2014) and (Magdich et al., 2015),
(Magdich et al., 2018), the authors proposed a new
UML/MARTE-based design patterns to supporting
semi-partitioned and global scheduling. The advan-
tage of these patterns is the automatic selection of
the scheduling algorithm and approach. The bene-
ficial of all the earlier mentioned works is they can
facilitate the design of adaptive real-time systems.
They tackled only one specific adaptation mechanism,
which consequently compromises their reusability to
adapt the system to new system requirements and con-
straints. They assume that adaptability is a dynamic
change in the task allocation without taking into ac-
count operating mode adaptation which is an essential
ax of adaptation, unlike this approach. In this paper,
we suggest a design pattern providing support several
adaptability mechanisms and real-time constraint
4 PROPOSED DESIGN PATTERN
4.1 Real-Time Adaptive Pattern
Specification
In this section, we present the description of our pat-
tern. We follow the pattern templates presented in
(Buschmann et al., 2007) for our description. Four
fundamental fields were detailed in this paper, with
are: Overview, Context, Problem, Solution. We
use UML MARTE based design pattern intended for
adaptability. Our pattern will be limited only to the
static view for UML MARTE.
1. Overview: Pattern is aimed to support the mod-
eling of adaptive real-time systems, and may be
used to design different systems in the same field
without ever being adopted twice similarly. Ev-
ery pattern must deal with a well-defined prob-
lem. It represents a solution that solves an issue
and supports the modeling of complex systems at
the early design stage.
2. Context: Our design pattern intends to guide de-
signers to specify all the properties to be used in
the context of an adaptive RTES allowing con-
trolled mode transitions.
3. Problem: MARTE provides support the model-
ing, specification and early verification of RTES,
unfortunately, it does not provide a solution for
modeling adaptability.
4. Solution: The purpose of the suggested pattern is
to support the modeling of software/hardware ar-
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
244
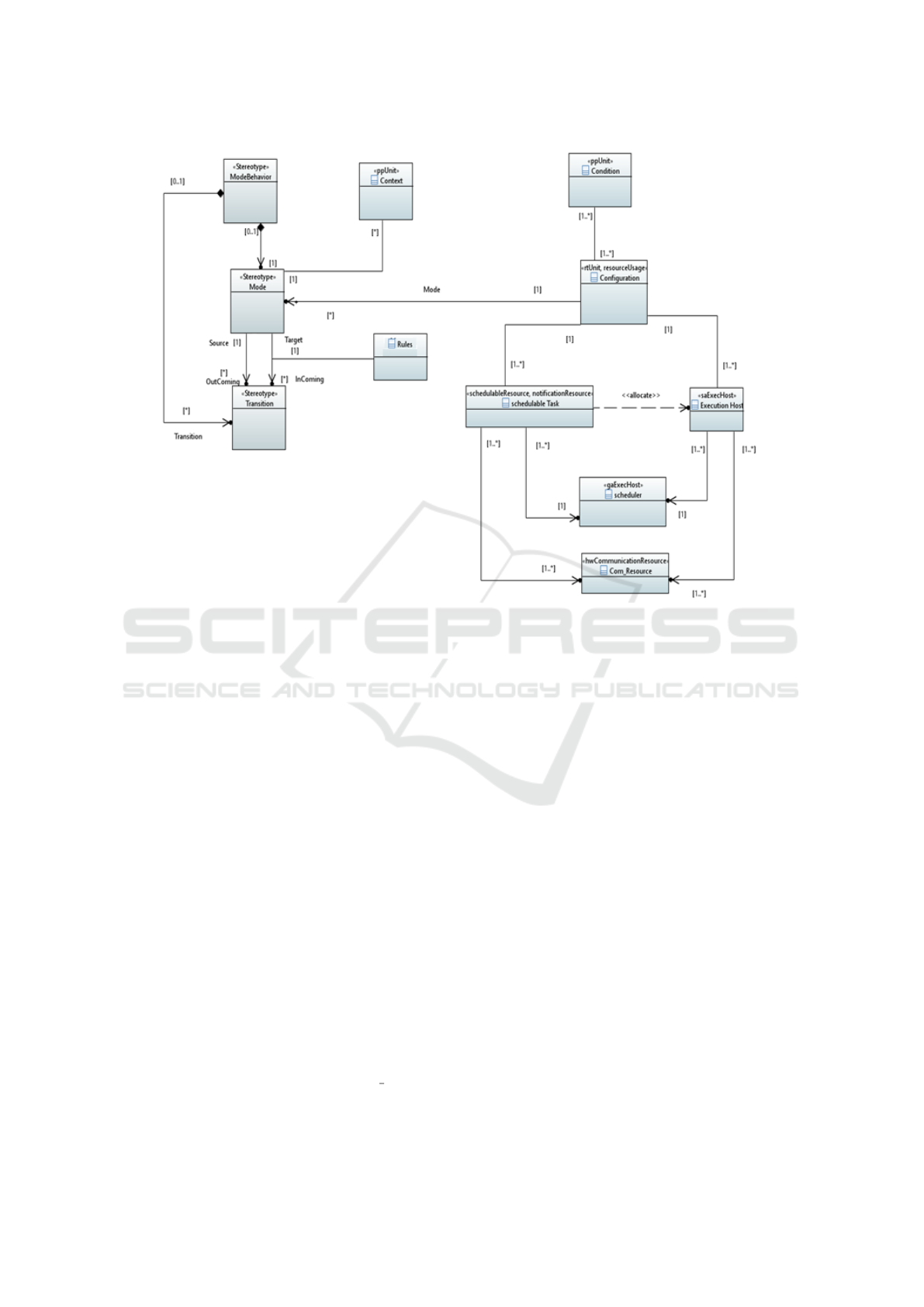
Figure 2: Static view of the proposed adaptive design pattern.
chitecture of the system with adaptive constraints
in the same view. The pattern modeling is based
on UML/MARTE as a high-level modeling lan-
guage that provides a big set of stereotypes to an-
notate the built views.
4.2 Proposed Design Pattern
Adaptation means changing the functionality of the
system to accommodate a change in the execu-
tion context. Our pattern is based on the MARTE
CoreElement sub-profile, we propose to add some
classes to the base model to be compatible with the
requirements of adaptive systems. Then, we use some
stereotype of MARTE to support the configuration
context.
As indicated in the CommonBehavior package,
the change from one mode to another will be done by
a transition. In the case of adaptive RTES, this change
must respect some rules. To manage this adaptability
mechanism, we propose to add an association class
Rules between the Mode and Transition classes. This
class is used to specify how the systems are adapted
to its environment changes.
This class Rules has two attributes, OP
RECONF
with the type NFP-Duration to indicate the duration
of a configuration operation. The second one is Safe
State with the Boolean type, to indicate when the sys-
tem is in a stable state. This property ensures that
adaptation will not affect the proper functioning of the
systems.
RTES is mainly related to its runtime environment
for that we propose to add a class Context to represent
the operational environment. Context is a passive unit
that carries information about the status of a system
property. This active class, stereotyped as ppUnit, has
one attribute, Context with the String type to indicate
the context of activating mode.
In real-time embedded systems, a mode can be
started by one or more contexts, and a context can
launch only one mode. To manage adaptation ele-
ment, the class Configuration is proposed to represent
the generalization of adaptation and the change of el-
ements. The NextMode method, allow the migration
of the system to a new mode that fulfills the system
requirements. This active class is stereotyped as an
RtUnit and have the attributes extTime, memoryUsage
and DataSize.
Switching from one mode to another mode will
be through a configuration. A condition of use is at-
tached to each configuration of the system, since a
system can have several configurations in one mode,
the condition makes it possible to decide the choice of
the configuration in a specific context. The conditions
A MARTE-Based Design Pattern for Adaptive Real-Time Embedded Systems
245
link the configurations and each variability of the en-
vironment. Every attribute of the Condition class cap-
tures an element of the environment. The attributes of
the condition class can be: battery which indicates the
remaining percentage of the battery, Memory which
represents the internal state of a memory in percent-
age. A configuration is composed of one or many
schedulable tasks that will be allocated to one or many
execution processors.
schedulable Task is a class for modeling the soft-
ware resource managed by the OS, a task should
have a software synchronization resource used to
notify events. It is annotated with schedulableRe-
sources and NotificationResources. It has only one at-
tribute, DeadlineElements. The class Execution host,
is stereotyped SaExecuteHoste, annotate processing
unit. To partitioning tasks in the different scheduler,
we use a scheduler annotated GaExecHost. The dif-
ferent components of an RTES should be commu-
nicated; for that, we add a class communication re-
sources annotated with Hw- CommunicationResource
which may be a bus or Direct Memory Access.
5 CASE STUDY
To better explain our proposal, we use a UGV (Un-
manned Ground Vehicle) (Etienne, 2009) system as
an entire running application in this paper. We have
chosen this system which is particularly relevant for
the dynamic nature of its operational environment and
its ability to operate in several modes of operation.
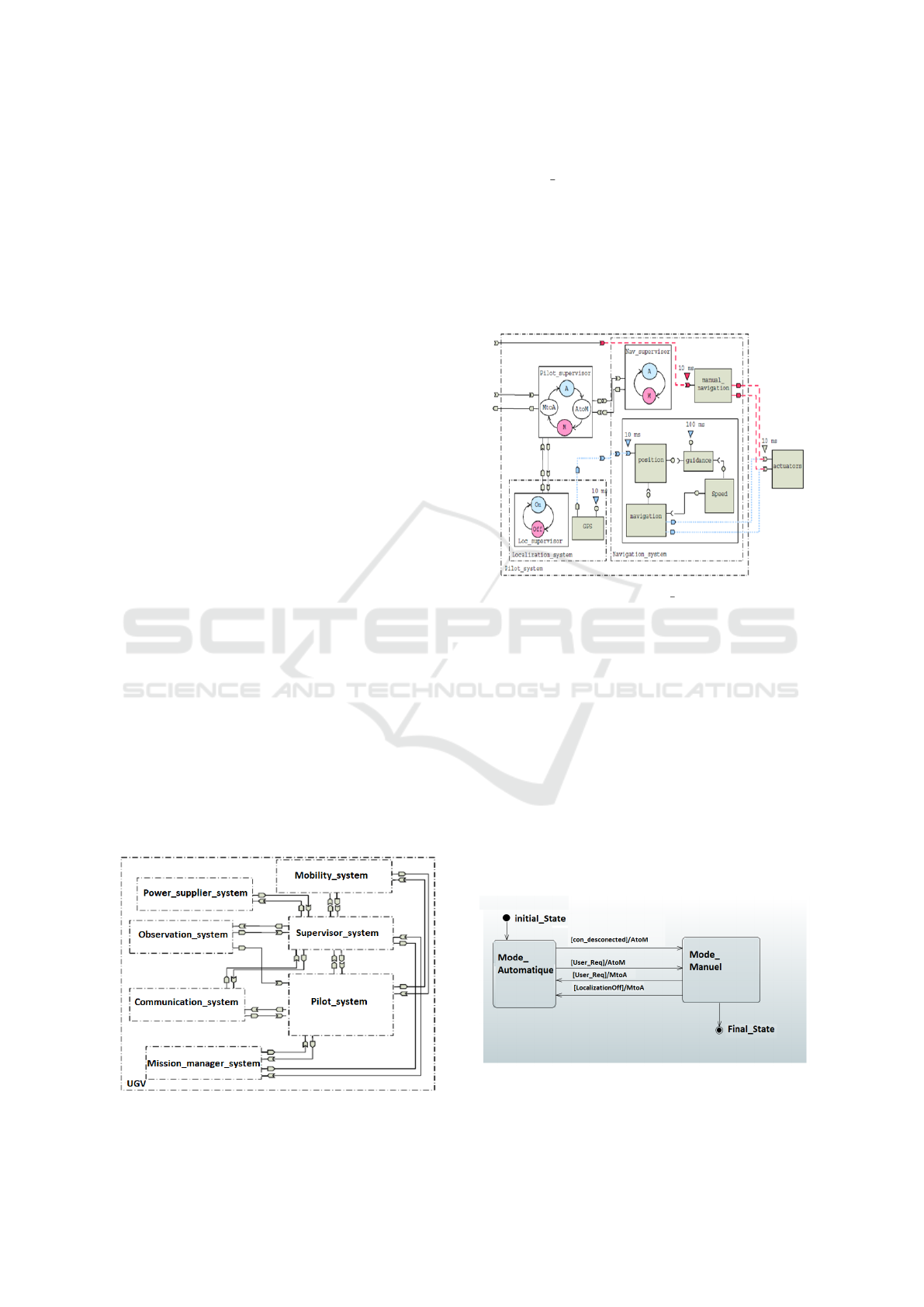
The software architecture of the UGV consists of
several subsystems. The communicate between then
it will be with sending messages via their communi-
cation ports. Figure 3 shows the software architecture
of the system.
Figure 3: Software architecture UGV (Etienne, 2009).
We are interested in our study, within the robot
UGV, Pilot System0 on the control system that oper-
ates in two operational modes. An automatic mode,
where the subsystem calculates the steering com-
mands from its current position, its environment as
perceived by its sensors and a path that has been pre-
programmed. A manual mode, where the steering
system receives steering commands sent by an opera-
tor (Figure 4).
Figure 4: Architecture of the Pilot System (Etienne, 2009).
As indicated in figure 5, The UGV system is mod-
eled by two modes. The first mode was represented
by M and indicate the manual mode and the second
mode is A represented the automatic mode of the vehi-
cle. The transition from the mode M to the mode A is
represented respectively by the two transitions MtoA
and AtoM. Since the system operates in the manual
mode, it can switch to automatic mode when the com-
munication system is disconnected or by user request.
However, if the location system is out of order, this
passage is not allowed. Besides, the system switches
from the mode A to the mode M if the location system
is not enabled or from user requirement. The avail-
ability of the communication system conditions this
transition.
Figure 5: Mode Behavior/Intra Mode.
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
246
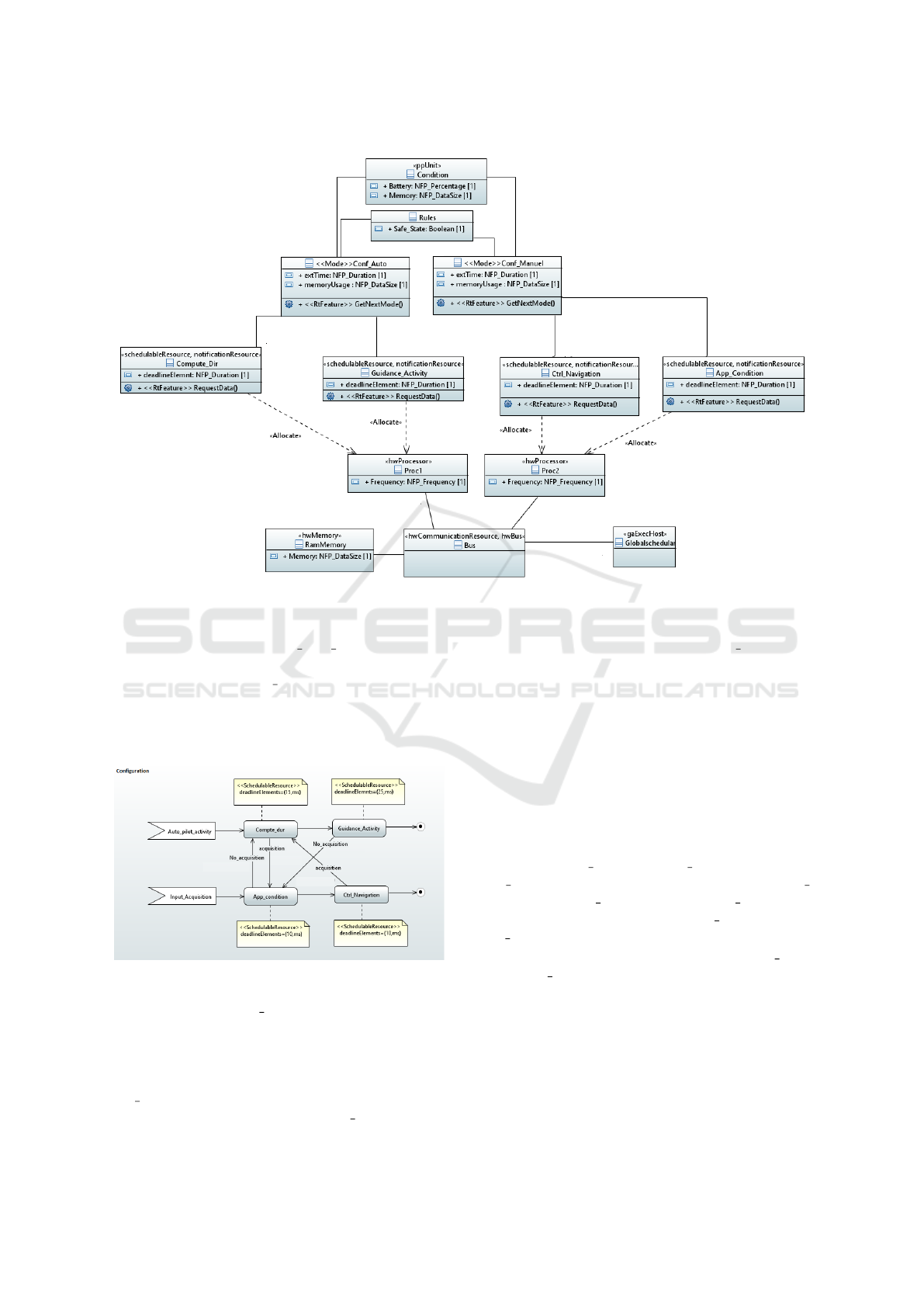
Figure 6: UGV Class Diagram.
In Figure 7, the automatic mode execution sce-
nario is triggered by the Auto pilot activity event re-
trieving the current vehicle position and invoking the
schedulable task Compte dur. This task calculates
the commands to be sent to the robot actuators, start-
ing from the current position and the last calculated
speed value, the time of this task is 15 ms.
Figure 7: Workload Model UGV system.
Then, the Guidance Activity task retrieves the last
ten saved positions to compute the current robot
speed, the time of this task is 25 ms. A follow-
ing link links operations in this mode. On the other
hand, the manual mode is activated by the input In-
put Acquisition which corresponds to an order issued
by the end user. Subsequently, the App condition task
calculates the guidance commands to be applied, the
time of this task is 10 ms. Finally, the Ctrl Navigation
action stores the last ten positions of the vehicle in
4ms.
For the automatic mode, we can change from any
task to the first task of manual mode if a notification of
acquisition found. The same for a switch from manual
to automatic mode, if notification das not exist, we
can change from any task of the manual mode to the
first task of the automatic mode.
As indicated in the figure 6, we have two con-
figurations, Automatic and Manuel configuration;
they were presented respectively in the class di-
agram with Con Auto and Con Manuel. For the
Con Auto, we have two schedulable tasks: Compte
Dur and Guidance Activity. For the Con Manuel we
have two schedulable tasks too, App Condition and
Ctrl Navigation.
Each configuration characterises with her ex Time
type (NFP Duration), and with her memory usage.
For the passage from one mode to another, a condi-
tion about the percentage of battery should be vali-
dated, in the same time an affirmation about the state
of the system type Boolean should be verified (It’s
safe to change from a configuration to another). A
schedulable task should be allocated to an execution
processor, in our study, we proposed two processor
proc1 and proc2, each processor for each configura-
A MARTE-Based Design Pattern for Adaptive Real-Time Embedded Systems
247

tion. Each execution processor needs same resource
to run such as hwMemory and a communication Bus
to relate resources.
6 CONCLUSIONS
Throughout this paper, we have proposed a new de-
sign pattern providing support for adaptive modeling
and time constraint for RTES. We used UML anno-
tated with the MARTE profile to design our pattern in
a static view. The advantage of our approach is the
capability to model adaptive properties which will be
extracted, to serve during the scheduling step. Our
proposal has already been performed on the papyrus
tool, which is an editor of MARTE-based modeling,
and validated through a case study.
The future task we have assigned to ourselves is to
define empirical and comparative studies to provide
quality indicators to reduce the development risks of
Adaptive RTES and to measure the benefits of our
proposal.
REFERENCES
Abuseta, Y. and Swesi, K. (2015). Design patterns for
self adaptive systems engineering. arXiv preprint
arXiv:1508.01330.
Buschmann, F., Henney, K., and Schimdt, D. (2007).
Pattern-oriented software architecture: on patterns
and pattern language. volume 5. John wiley & sons.
Etienne, B. (2009). Configuration et reconfiguration des
syst
`
emes temps-re
´
el r
´
epartis embarqu
´
es critiques et
adaptatifs. In T
´
el
´
ecom ParisTech.
Gamma, E. (1995). Design patterns: elements of reusable
object-oriented software. Pearson Education India.
Hamerski, J. C., Abich, G., Reis, R., Ost, L., and Amory, A.
(2018). A design patterns-based middleware for mul-
tiprocessor systems-on-chip. In 2018 31st Symposium
on Integrated Circuits and Systems Design (SBCCI),
pages 1–6. IEEE.
Magdich, A., Kacem, Y. H., Kerboeuf, M., Mahfoudhi, A.,
and Abid, M. (2018). A design pattern-based ap-
proach for automatic choice of semi-partitioned and
global scheduling algorithms. volume 97, pages 83–
98. Elsevier.
Magdich, A., Kacem, Y. H., Mahfoudhi, A., and Ker-
boeuf, M. (2014). A uml/marte-based design pat-
tern for semi-partitioned scheduling analysis. In
2014 IEEE 23rd International Workshops on Enabling
Technologies: Infrastructures for Collaborative En-
terprise (WETICE), pages 300–305. IEEE.
Magdich, A., Kacem, Y. H., Mahfoudhi, A., Kerboeuf, M.,
and Abid, M. (2015). Real-time design patterns: Ar-
chitectural designs for automatic semi-partitioned and
global scheduling. In International Conference on En-
terprise, Business-Process and Information Systems
Modeling, pages 447–460. Springer.
Naija, M. and Ahmed, S. B. (2016a). Extending
uml/marte-sam for integrating adaptation mechanisms
in scheduling view. In Proceedings of the 11th Inter-
national Conference on Evaluation of Novel Software
Approaches to Software Engineering, pages 84–90.
SCITEPRESS-Science and Technology Publications,
Lda.
Naija, M. and Ahmed, S. B. (2016b). A new marte ex-
tension to address adaptation mechanisms in schedul-
ing view. In International Conference on Evaluation
of Novel Approaches to Software Engineering, pages
27–43. Springer.
Naija, M., Ahmed, S. B., and Bruel, J.-M. (2015). New
schedulability analysis for real-time systems based on
mde and petri nets model at early design stages. In
Software Technologies (ICSOFT), 2015 10th Inter-
national Joint Conference on, volume 1, pages 1–9.
IEEE.
Naija, M., Bruel, J.-M., and Ahmed, S. B. (2016). To-
wards a marte extension to address adaptation mech-
anisms. In High Assurance Systems Engineering
(HASE), 2016 IEEE 17th International Symposium
on, pages 240–243. IEEE.
OMG (2008). Object management group. a uml profile for
marte: Modeling and analysis of real-time embedded
systems. In Beta2, Object Management Group.
Ramirez, A. J. and Cheng, B. H. (2010). Design patterns
for developing dynamically adaptive systems. In Pro-
ceedings of the 2010 ICSE Workshop on Software En-
gineering for Adaptive and Self-Managing Systems,
pages 49–58. ACM.
Rohnert, F. B. R. M. H. and Stal, P. S. M. (1996). Pattern-
oriented software architecture: A system of patterns.
page 13.
Said, M. B., Kacem, Y. H., Kerboeuf, M., Amor, N. B., and
Abid, M. (2014). Design patterns for self-adaptive rte
systems specification. International Journal of Recon-
figurable Computing, 2014:8.
Schmidt, D. C. (2006). Model-driven engineering. vol-
ume 39, page 25. Citeseer.
Supriana, I., Surendro, K., et al. (2018). Self-adaptive
software modeling based on contextual requirements.
Telkomnika, 16(3).
ENASE 2019 - 14th International Conference on Evaluation of Novel Approaches to Software Engineering
248
